Изобретение относится к области геофизических измерений, в частности к скважинной инклинометрии.
Известен способ повышения виброустойчивости приборов для измерения ускорений, заключающийся в том, что для измерения используют акселерометры, измерительный диапазон которых превышает амплитуду возможных вибраций, а выходные сигналы акселерометров сглаживают [Ковшов Г.Н., Алимбеков Р.И., Жибер А.В. Инклинометры. (Основы теории и проектирования). Уфа, Гилем, 1998, стр.188].
Недостатком этого способа является уменьшение точности измерения ускорения при отсутствии вибрации, так как при этом используют только часть измерительного диапазона акселерометров.
Известен способ повышения виброустойчивости инклинометра, заключающийся в том, что зенитный и апсидальный углы измеряют с помощью акселерометров, установленных на амортизированное относительно корпуса инклинометра основание [Исаченко В.Х. Инклинометрия скважин. М., Недра, 1987, стр.58, 72, 73].
Недостатком этого способа является уменьшение при вибрации точности измерения проекций ускорения силы тяжести на оси, связанные с корпусом инклинометра, и уменьшение вследствие этого точности измерения углов.
Предлагаемый способ направлен на повышение виброустойчивости инклинометра при сохранении точности измерения углов в области малых вибрационных воздействий и при их отсутствии. Это достигается тем, что проекции ускорения силы тяжести, используемые для вычисления зенитного и апсидального углов, измеряют двумя триадами акселерометров: с большим и с меньшим измерительным диапазоном, для вычисления углов автоматически выбирают сигналы от акселерометров с меньшим измерительным диапазоном, если измеренное значение модуля ускорения силы тяжести больше или равно минимальному значению ускорения силы тяжести на Земле (9,78 м/с2), и от акселерометров с большим измерительным диапазоном, если измеренное значение модуля ускорения силы тяжести меньше минимального значения ускорения силы тяжести на Земле, причем измеряют значение модуля ускорения силы тяжести по осредненным показаниям акселерометров с меньшим измерительным диапазоном.
Ускорение, действующее на акселерометр, складывается из ускорения силы тяжести и ускорения переносного движения. При работе инклинометра в составе буровой компоновки последнее вызвано вибрацией буровых агрегатов и носит знакопеременный характер. Пока суммарное ускорение силы тяжести и вибраций укладывается в измерительный диапазон акселерометров, оно измеряется без искажений (с точностью, определяемой нелинейностью характеристики преобразования акселерометра). В этом случае средняя величина измеренного модуля ускорения равна ускорению силы тяжести в месте измерений. Если суммарное ускорение превышает измерительный диапазон акселерометров, происходит "срезание" тех участков измеряемого ускорения, которые выходят за пределы измерительного диапазона. При этом средняя величина измеренного модуля ускорения уменьшается и становится меньше величины ускорения силы тяжести в месте измерения.
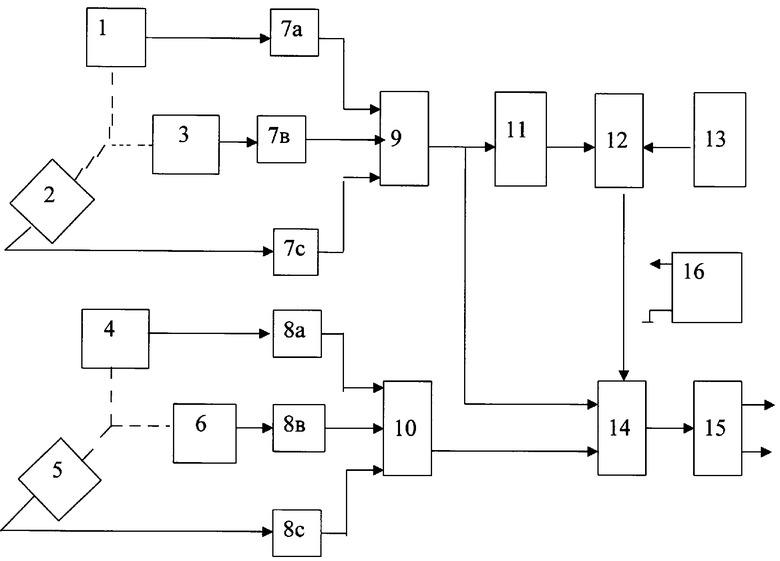
Предлагаемый способ реализуется в устройстве, показанном на чертеже, на котором приняты следующие обозначения:
1, 2, 3 - акселерометры с меньшим измерительным диапазоном и образующие первую триаду акселерометров (триада «точного» отсчета);
4, 5, 6 - акселерометры с большим измерительным диапазоном, и образующие вторую триаду акселерометров (триада «грубого отсчета»);
7a, 7b, 7c, 8а, 8b, 8с - блоки согласования сигналов акселерометров;
9, 10 - аналого-цифровые преобразователи (АЦП);
11 - блок вычисления модуля ускорения;
12 - компаратор;
13 - блок выработки минимального значения ускорения силы тяжести;
14 - коммутатор;
15 - вычислитель;
16 - блок электропитания.
Инклинометр содержит корпус, размещенные в нем триаду акселерометров 1, 2, 3 с меньшим измерительным диапазоном и с ортогональными осями чувствительности, параллельную им вторую триаду акселерометров 4, 5, 6 с большим измерительным диапазоном, блоки 7а, 7b, 7с и 8а, 8b, 8с согласования сигналов акселерометров, аналого-цифровые преобразователи (АЦП) 9 и 10, блок 11 вычисления модуля ускорения, компаратор 12, блок 13 выработки величины минимального значения ускорения силы тяжести, коммутатор 14, вычислитель 15 и блок электропитания 16. Электрические выходы акселерометров 1, 2, 3 через соответственно блоки 7а, 7b, 7с согласования сигналов соединены с входами АЦП 9, электрические выходы акселерометров 4, 5, 6 через соответственно блоки 8а, 8b, 8с согласования сигналов соединены со входами АЦП 10. Выходы АЦП 9 и 10 соединены с двумя входами коммутатора 14, одновременно выход АЦП 9 соединен со входом блока 11 вычисления модуля ускорения, выход которого соединен с одним из входов компаратора 12, второй вход которого соединен с выходом блока 13 выработки величины минимального значения ускорения силы тяжести на Земле. Выход компаратора 12 соединен с управляющим входом коммутатора 14, выход которого соединен с входом вычислителя 15. Все блоки устройства питаются от блока электропитания 16. На чертеже электрические связи блока электропитания 16 с другими блоками не показаны.
Устройство функционирует следующим образом. Сигналы ат х, ат у, aт z первой триады акселерометров 1, 2, 3 "точного" отсчета, измерительный диапазон которых незначительно превосходит максимальную величину ускорения силы тяжести на Земле (9,83 м/с2), проходя через блоки согласования 7а, 7b, 7с, поступают на АЦП 9. Сигналы аг х, аг у, aг z второй триады акселерометров 4, 5, 6 "грубого" отсчета, измерительный диапазон которых превосходит сумму максимального ускорения вибраций и ускорения силы тяжести, проходя через блоки согласования 8а, 8b, 8с, поступают на АЦП 10. Блоки согласования 7а, 7b, 7с и 8а, 8b, 8с сглаживают сигналы акселерометров и масштабируют их для согласования с входами АЦП 9 и 10. Цифровые сигналы с выхода АЦП 9, пропорциональные проекциям ат х, ат у, aт z, поступают на блок 11 вычисления модуля ускорения IaI, в котором сигналы осредняются и по их осредненным значениям  ,
,  ,
,  вычисляется величина IaI по формуле
вычисляется величина IaI по формуле 
По каждой акселерометрической измерительной оси составляющая ускорения представляет сумму проекции ускорения силы тяжести и проекции вибрационного ускорения. Пока это суммарное ускорение лежит в пределах измерительного диапазона акселерометров 1, 2, 3 "точного" отсчета, его средняя величина равна проекции ускорения силы тяжести на измерительную ось. Если суммарная проекция ускорения силы тяжести и вибрационного ускорения на измерительную ось любого из акселерометров 1, 2, 3 выходит за пределы измерительного диапазона, то в связи с ограничением выходного сигнала, его средняя величина падает тем больше, чем больше ограничивается по амплитуде выходной сигнал. Таким образом, если вычисленная величина IaI равна ускорению g силы тяжести, то все акселерометры 1, 2, 3 триады "точного" отсчета работают в пределах своего измерительного диапазона, если же вычисленная величина IaI меньше ускорения силы тяжести g, то хотя бы по одной из измерительных осей триады акселерометров 1, 2, 3 суммарное ускорение превосходит измерительный диапазон. В этом случае для измерения зенитного и апсидального углов используются сигналы триады акселерометров 4, 5, 6 "грубого" отсчета.
Для автоматического переключения акселерометров "точного" и "грубого" отсчета сигнал, пропорциональный величине IaI, с выхода блока 11 поступает на компаратор 12, где сравнивается с поступающим на его второй вход из блока 13 сигналом, пропорциональным минимальной величине ускорения силы тяжести на Земле gmin=9,78 м/с2. Результат сравнения поступает на управляющий вход коммутатора 14, на сигнальные входы которого поступают сигналы акселерометров "точного" и "грубого" отсчетов, прошедшие через АЦП 9 и 10. Если IaI≥gmin, то через коммутатор 14 на вычислитель 15 поступают из АЦП 9 сигналы акселерометров 1, 2, 3 "точного " отсчета. Если IaI<gmin, то через коммутатор 14 на вычислитель 15 поступают из АЦП 10 сигналы акселерометров 4, 5, 6 "грубого" отсчета. В вычислителе 15 по акселерометрическим сигналам вычисляются зенитный угол (ЗУ) и апсидальный угол (АУ) по известным формулам [Ковшов Г.Н., Алимбеков Р.И., Жибер А.В. Инклинометры (Основы теории и проектирования). Уфа, Гилем, 1998, стр.57]:

Заявленная совокупность признаков достаточна для решения поставленной задачи и реализована в действующем макете.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННЫЙ МАГНИТНЫЙ КОМПАС | 2006 |
|
RU2331843C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО АЗИМУТА В СКВАЖИННОМ ИНКЛИНОМЕТРЕ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290673C2 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| ФЕРРОЗОНДОВЫЙ СКВАЖИННЫЙ ИНКЛИНОМЕТР | 2005 |
|
RU2291294C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ НАЧАЛЬНОЙ АЗИМУТАЛЬНОЙ ВЫСТАВКИ СКВАЖИННОГО ПРИБОРА ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА И АЗИМУТАЛЬНЫЙ МОДУЛЬ | 2012 |
|
RU2501946C2 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН ГИРОСКОПИЧЕСКИМ ИНКЛИНОМЕТРОМ | 2008 |
|
RU2387828C1 |
Изобретение относится к области геофизических измерений, в частности к скважинной инклинометрии. Техническим результатом изобретения является повышение виброусточивости инклинометра. Для этого проекции ускорения силы тяжести, используемые для вычисления зенитного и апсидального углов, измеряют двумя триадами акселерометров: с большим и с меньшим измерительным диапазоном. Для вычисления углов автоматически выбираются сигналы от акселерометров с меньшим измерительным диапазоном, если измеренное по осредненным показаниям акселерометров с меньшим измерительным диапазоном значение модуля ускорения силы тяжести больше или равно минимальному значению ускорения силы тяжести на Земле (9,78 м/с2), и от акселерометров с большим измерительным диапазоном, если измеренное значение модуля ускорения силы тяжести меньше минимального значения ускорения силы тяжести на Земле. Вычисление углов по сигналам акселерометров производится по известным формулам в бортовом вычислителе инклинометра. 2 н.п. ф-лы, 1 ил.
1. Способ повышения виброустойчивости скважинного инклинометра, заключающийся в том, что проекции вектора ускорения силы тяжести, используемые для вычисления зенитного и апсидального углов, измеряют двумя триадами акселерометров соответственно с большим и меньшим измерительными диапазонами, отличающийся тем, что для вычисления углов автоматически выбирают сигналы от акселерометров с меньшим измерительным диапазоном, если измеренное значение модуля ускорения больше или равно минимальной величине ускорения силы тяжести на Земле, и от акселерометров с большим измерительным диапазоном, если измеренное значение модуля ускорения меньше минимальной величины ускорения силы тяжести на Земле, причем измеряют значение модуля ускорения по осредненным показаниям акселерометров с меньшим измерительным диапазоном.
2. Скважинный инклинометр с повышенной виброустойчивостью, содержащий корпус, размещенные в нем триаду акселерометров с меньшим измерительным диапазоном, триаду акселерометров с большим измерительным диапазоном, устройства согласования сигналов, аналого-цифровые преобразователи, вычислитель и блок питания, отличающийся тем, что в его состав введены блок вычисления модуля ускорения, компаратор, блок выработки величины минимального значения ускорения силы тяжести, коммутатор, при этом вход блока вычисления модуля ускорения через аналого-цифровой преобразователь соединен с выходами акселерометров с меньшим измерительным диапазоном, выход блока вычисления модуля ускорения соединен с первым входом компаратора, второй вход которого соединен с выходом блока выработки величины минимального ускорения силы тяжести, выход компаратора соединен с управляющим входом коммутатора, сигнальные входы которого соединены через аналогоцифровые преобразователи с выходами акселерометров с меньшим и с большим измерительными диапазонами, а выход коммутатора подключен к вычислителю.
| ИСАЧЕНКО В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, с.54-58, 179-182 | |||
| Феррозондовый инклинометр | 1979 |
|
SU855200A1 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| RU 2005121778 А, 20.01.2007 | |||
| ВИБРОУСТОЙЧИВЫЕ ГИДРАВЛИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ ЗЕНИТНОГО И ВИЗИРНОГО УГЛОВ | 1998 |
|
RU2178821C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ | 2002 |
|
RU2231638C1 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОРРЕКЦИИ БЛОКА АКСЕЛЕРОМЕТРОВ В ПРОЦЕССЕ БУРЕНИЯ | 2002 |
|
RU2243373C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ОРИЕНТАЦИИ СКВАЖИНЫ И ИНКЛИНОМЕТР | 2003 |
|
RU2253838C2 |
| ФЕРРОЗОНДОВЫЙ СКВАЖИННЫЙ ИНКЛИНОМЕТР | 2005 |
|
RU2291294C1 |
| US 4987684 А1, 29.01.1991 | |||
| БРИТВА ДЛЯ СУХОГО БРИТЬЯ | 2007 |
|
RU2370361C2 |

