Изобретение относится к машиностроению и может быть использовано для соединения деталей машин.
В механике широко используется понятие кинематической пары. Кинематическая пара есть соединение двух соприкасающихся звеньев, допускающее их относительное движение [1, стр.20, строки 19-20 снизу]. Кинематические пары могут быть одно-, двух-, трех-, четырех- и пятиподвижные, то есть число степеней свободы звена кинематической пары в относительном движении может изменяться также от 1 до 5 [1, стр.23, первая строка сверху]. Недостатком кинематических пар является малое число относительной подвижности звеньев, ограниченное числами от одного до пяти. На практике может потребоваться большее число подвижностей между звеньями, чем дает одна кинематическая пара, то есть более пяти.
Наиболее близка к заявленному пятиподвижная кинематическая пара - шар на плоскости [1, стр.24, рис.1.4]. В этой паре шар относительно плоскости имеет всего одно условие связи, следовательно, данная кинематическая пара является парой первого класса [1, стр.24, строки 10-11 снизу] и дает число относительных подвижностей, равное пяти, между входным звеном - плоскостью и выходным звеном - шаром. Однако в некоторых случаях этого количества относительных движений между входным звеном и выходным оказывается недостаточно, например, при работе охвата робота-манипулятора потребными являются его движения, исчисляется десятками
Задачей настоящего изобретения является увеличение количества относительных движений между звеньями.
Предлагается между входным и выходным звеньями установить дополнительное звено, назвав это соединение трехзвенным кинематическим соединением (трексом) с шестью относительными движениями.
Сущность заявляемого соединения заключается в том, что предлагается трехзвенное кинематическое соединение (трекс) с шестью относительными движениями, включающее входное и выходное звенья, в котором между входным и выходным звеньями установлено промежуточное звено, при этом входное звено образует с промежуточным звеном плоскостную кинематическую пару - параллелепипед на плоскости, промежуточное звено с выходным звеном - кинематическую пару - цилиндр на плоскости, а входное звено с выходным звеном образует точечную кинематическую пару - цилиндр на цилиндре.
Использованные в предлагаемом соединении отдельные пары известны, а именно плоскостная [1, стр.31, четвертая строка сверху], цилиндр на плоскости [1, стр.24, рис.1.5] и цилиндр на цилиндре [2, стр.735, рис.б], однако совместное их применение в предлагаемом устройстве дает новый важный эффект.
Общий вид предлагаемого соединения показан на чертеже.
Соединение состоит из входного звена 1, выходного звена 2, между которыми устанавливается промежуточное звено 3.
Работает соединение следующим образом.
Выходное звено 2 в этом соединении может иметь 6 движений относительно звена 1. Это доказывается следующим: рассматривая относительность движения звена 2, входное звено 1 считаем неподвижным, следовательно, подвижными остаются два звена (промежуточное звено 3 и выходное звено 2), то есть n=2 (n - число подвижных звеньев).
В этом соединении используются три кинематические пары, а именно пары между звеньями 1 и 3, между 2 и 3 и между 1 и 2. Первая из этих пар - плоскостная - пара третьего класса р3. Вторая - цилиндр на плоскости - пара второго класса р2. Третья - точечная - соприкосновение двух цилиндров - пара первого класса p1.
Если воспользоваться известной формулой Малышева А.П., имеющей вид [1, стр 35, формула (2.4)]

где W - означает подвижность соединения,
n - число подвижных звеньев, n=2;
р5, p4, p3, p2, p1 - число кинематических пар соответственно:
р5 - пятого класса (одноподвижные), р4 - четвертого класса (двухподвижные), р3 - третьего класса (трехподвижные), р2 - второго класса (четырехподвижные), p1 - первого класса (пятиподвижные).
В рассматриваемом случае р5=0, р4=0, р3=0, p2=1, p1=1, тогда по приведенной формуле получим относительную подвижность звена 2 относительно звена 1, равную W=6, подтверждающую, что представленное соединение (треке) обладает шестью относительными движениями.
Источники информации
1. Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1975. 640 с.
2. Крайнев А.Ф. Механика машин. Фундаментальный словарь. М.: Машиностроение, 2000. - 904 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХЗВЕННОЕ КИНЕМАТИЧЕСКОЕ СОЕДИНЕНИЕ (ТРЕКС) С СЕМЬЮ ОТНОСИТЕЛЬНЫМИ ДВИЖЕНИЯМИ | 2008 |
|
RU2375619C1 |
| ТРЁХЗВЕННОЕ КИНЕМАТИЧЕСКОЕ СОЕДИНЕНИЕ (ТРЕКС) С ВОСЬМЬЮ ОТНОСИТЕЛЬНЫМИ ДВИЖЕНИЯМИ | 2014 |
|
RU2583323C1 |
| Трехзвенное кинематическое соединение с тремя относительными движениями | 2015 |
|
RU2610239C1 |
| ПРОСТРАНСТВЕННЫЙ ТРЕХЗВЕННЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2009 |
|
RU2404384C2 |
| ПРОСТРАНСТВЕННЫЙ ТЕСТОМЕСИЛЬНЫЙ МЕХАНИЗМ | 2006 |
|
RU2305406C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| Автоматизированный сортировщик-подборщик манипулятора-трипода | 2019 |
|
RU2722960C1 |
| РЕВЕРСИВНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2011 |
|
RU2479768C1 |
Изобретение относится к машиностроению, может быть использовано для соединения деталей машин. Соединение включает входное и выходное звенья. Между входным и выходным звеньями устанавливается промежуточное звено, при этом входное звено взаимодействует с промежуточным звеном по плоскостной кинематической паре - параллелепипед на плоскости, промежуточное звено с выходным звеном - по кинематической паре - цилиндр на плоскости, а входное звено с выходным звеном взаимодействуют в точечной кинематической паре - цилиндр на цилиндре. Достигается увеличение количества относительных движений между звеньями. 1 ил.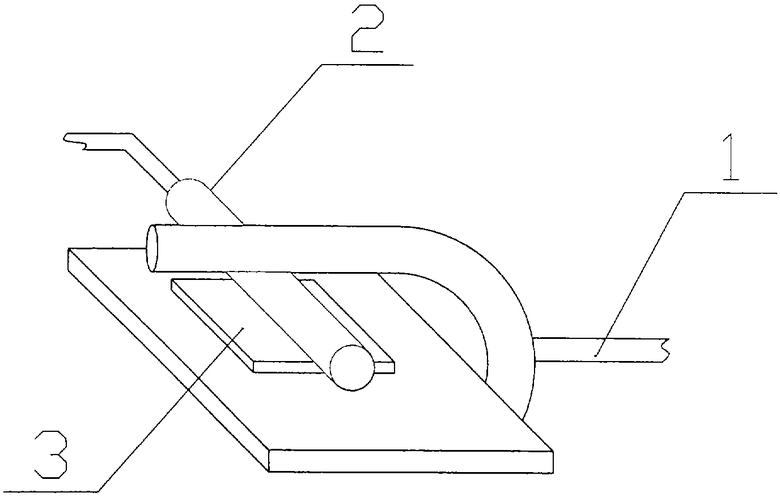
Трехзвенное кинематическое соединение с шестью относительными движениями, включающее входное и выходное звенья, отличающееся тем, что между входным и выходным звеньями установлено промежуточное звено, при этом входное звено образует с промежуточным звеном плоскостную кинематическую пару - параллелепипед на плоскости, промежуточное звено с выходным звеном - кинематическую пару - цилиндр на плоскости, а входное звено с выходным звеном образует точечную кинематическую пару - цилиндр на цилиндре.
| Артоболевский И.И | |||
| Теория механизмов и машин | |||
| - М.: Наука, 1975, с.24, рис.1.4 | |||
| Крайнев А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с.145-148, табл.3 | |||
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| JP 56001190 А, 08.01.1981 | |||
| JP 2001215399 А, 01.08.2001. | |||

