Изобретение относится к машиностроению, а конкретно к механизмам, используемым в пищевой промышленности.
Известен шарнирно-рычажный механизм мешалки, в том числе тестомесилки [1, стр.583, механизм №886], в котором лопасть мешалки скользит по дну сферической чаши. Недостатком этого механизма является необходимость использования двух приводов: привода для движения лопасти и привода для вращения чаши.
Наиболее близким к предлагаемому механизму является четырехзвенный шарнирный механизм тестомесилки [1, стр.598, механизм №909], в котором точки лапы мешалки движутся по определенным траекториям внутри дежи (сосуда с тестом). Однако и этот механизм имеет существенный недостаток, заключающийся в том, что лапа мешалки может двигаться лишь в одной плоскости, а именно в плоскости вращения приводного кривошипа.
Задачей настоящего изобретения является устранение отмеченного недостатка, что достигается тем, что лапе месилки задается пространственное движение внутри дежи (сосуда с тестом).
Сущность предлагаемого пространственного тестомесильного механизма заключается в том, что предлагается пространственный трехзвенный тестомесильный механизм, включающий в себя гидроцилиндр возвратно-поступательного действия и тестомесильную лапу, в котором приводное звено в виде поршня со штоком гидроцилиндра выполняется за одно целое с уголковым рычагом, входящим со стойкой и с пространственным коромыслом в цилиндрические кинематические пары (четвертого класса), а пространственное коромысло, жестко соединенное с лапой тестомесильного механизма, соединяется со стойкой через сферическую кинематическую пару (третьего класса).
Общий вид предлагаемого пространственного тестомесильного механизма показан на чертеже.
Привод механизма состоит из гидроцилиндра 1 со штоком поршня 2, выполненным за одно целое с уголковым рычагом 3 с помощью жесткого соединения 4. Уголковый рычаг 3 входит со стойкой в цилиндрическую кинематическую пару (пару четвертого класса) 5 и с пространственным коромыслом 6 в цилиндрическую кинематическую пару 9 (пару четвертого класса) 7. Пространственное коромысло 6 жестко соединено с лапой тестомесителя 8, которая перемешивает тесто в дежи (сосуд с тестом) 9, соединено со стойкой через сферическую кинематическую пару (пару третьего класса) 10.
Работает механизм следующим образом. При подаче рабочего агента (жидкости) в поршневую, а затем и в штоковую полости гидроцилиндра 1 поршень со штоком 2 получит возвратно-поступательное движение и через жесткое соединение 4 штока с уголковым рычагом 3 передаст движение последнему (уголковому рычагу), который начинает перемещаться относительно оси цилиндрической кинематической пары 5. При этом уголковый рычаг вместе со штоком и поршнем 2 гидроцилиндра 1 получит дополнительное вращательное движение вокруг геометрической оси гидроцилиндра. От уголкового рычага 3 через цилиндрическую кинематическую пару 7 получит движение пространственное коромысло 6, а с ним и лапа тестомесителя 8.
Так как пространственное коромысло 6 соединено со стойкой через сферическую кинематическую пару 10, то и пространственное коромысло 6 и лапа 8 получат пространственное движение, а лапа 8 в дежи 9 будет перемешивать тесто во всех направлениях.
Известно, что подвижность пространственных механизмов определяется по формуле Малышева А.П., имеющей вид [2, стр.35, формула (2, 4)]

В этой формуле W означает скольким звеньям следует задать движение, чтобы все остальные звенья двигались вполне определенно;
n - число подвижных звеньев;
р5, р4, р3, р2, p1 - число кинематических пар соответственно:
р5 - пятого класса (одноподвижные), р4 - четвертого класса (двухподвижные), р3 - третьего класса (трехподвижные), р2 - второго класса (четырехподвижные) p1 - первого класса (пятиподвижные).
В предлагаемом механизме число подвижных звеньев два - это уголковый рычаг 3, выполненный за одно целое с поршнем гидроцилиндра 1, и пространственное коромысло 6 совместно с лапой 8, т.е. n=2, а кинематических пар всего три - это две цилиндрические пары четвертого класса между уголковым рычагом 3 со стойкой (пара 5) и с пространственным коромыслом 6 (пара 7), а также пространственное коромысло 6 со стойкой (пара 10), т.е. р4=2, р3=1.
По формуле (1) по приведенным значениям получим
W=62-42-31=1.
Отсюда следует, что предлагаемый пространственный тестомесильный механизм вполне работоспособен.
Источники информации
1. Артоболевский И.И. Механизмы современной техники, т 1. - М.: Машиностроение, 1970.
2. Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1975. 640 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| ПРОСТРАНСТВЕННЫЙ ТРЕХЗВЕННЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2009 |
|
RU2404384C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ | 2012 |
|
RU2513776C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| Фронтальный погрузчик с расширенной рабочей зоной | 2022 |
|
RU2783604C1 |
| ОРИГАМИ МЕХАНИЗМ | 2018 |
|
RU2694704C1 |
| СКЛАДНОЙ МЕХАНИЗМ | 2018 |
|
RU2681978C1 |
Изобретение относится к машиностроению, а конкретно к механизмам, используемым в пищевой промышленности. Пространственный тестомесильный механизм состоит из гидроцилиндра возвратно-поступательного действия и тестомесильной лапы. Поршень со штоком гидроцилиндра выполнен за одно целое с уголковым рычагом, входящим со стойкой и с пространственным коромыслом в цилиндрические кинематические пары (четвертого класса), а пространственное коромысло, жестко соединенное с лапой тестомесильного механизма, соединено со стойкой через сферическую кинематическую пару (третьего класса). Изобретение позволяет повысить качество перемешивания теста и упростить конструкцию механизма. 1 ил.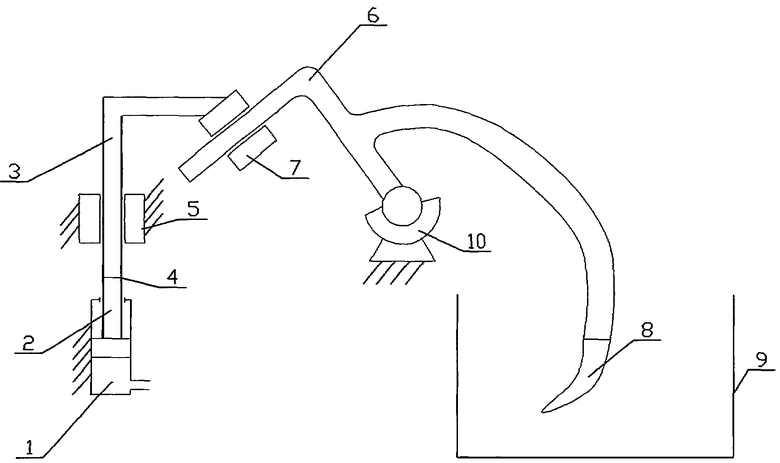
Пространственный тестомесильный механизм, состоящий из гидроцилиндра возвратно-поступательного действия и тестомесильной лапы, при этом поршень со штоком гидроцилиндра выполнен за одно целое с уголковым рычагом, входящим со стойкой и с пространственным коромыслом в цилиндрические кинематические пары (четвертого класса), а пространственное коромысло, жестко соединенное с лапой тестомесильного механизма, соединено со стойкой через сферическую кинематическую пару (третьего класса).
| Тестомесильная машина | 1984 |
|
SU1207453A1 |
| Тестомесильная машина | 1979 |
|
SU854350A1 |
| WO 9318656 А, 30.09.1993. | |||

