Изобретение относится к машиностроению, а именно к механизмам, в которых выходное звено получает поступательно-поворотное движение. Устройство может быть использовано в различных отраслях техники и сферах производственной деятельности, например для укупоривания банок крышками (консервирования) в пищевой промышленности.
Известны различные устройства, дающие на выходе поступательно-поворотное движение. Одним из них является винтовое соединение в виде болта-гайки [1]. Недостатком такого устройства является то, что в нем относительные вращательное и поступательное движения строго взаимодействуют через шаг резьбы.
Наиболее близким по своему устройству к предлагаемому механизму является пространственный тестомесильный механизм [2], состоящий из гидроцилиндра возвратно-поступательного действия и тестомесильной лапы, при этом поршень со штоком гидроцилиндра выполнен за одно целое с уголковым рычагом, входящим со стойкой и с пространственным коромыслом в цилиндрические кинематические пары (четвертого класса), а пространственное коромысло, жестко соединенное с лапой тестомесильного механизма, соединено со стойкой через сферическую кинематическую пару (третьего класса). В этом механизме выходное звено совершает сложное пространственное движение.
Недостатком описываемого механизма является то, что выходное звено в нем не может совершать поступательно-поворотного движения.
Задачей изобретения является обеспечение выходному звену поступательно-поворотного движения.
Сущность предлагаемого устройства заключается в том, что в предлагаемом пространственном трехзвенном поворотном механизме, включающем приводной неподвижный пневмо- или гидроцилиндр с поршнем и со штоком, выполненным в виде уголкового рычага, и выходное звено, уголковый рычаг связан с выходным звеном через сферическую кинематическую пару, выходное звено связано с неподвижным звеном-стойкой через цилиндрическую двухподвижную кинематическую пару, при этом выходное звено снабжено удерживающим охватом с возможностью получения поступательного движения и поворота относительно объекта воздействия.
Общий вид предлагаемого пространственного трехзвенного поворотного механизма показан на чертеже.
Механизм состоит из приводного неподвижного пневмо- или гидроцилиндра 1, поршня 2 со штоком 3, выполненным в виде уголкового рычага. Пневмо- или гидроцилиндр 1 снабжен входным и выходным отверстиями а и b для подачи через них жидкости или газа. Уголковый рычаг 3 посредством поршня 2 входит со стойкой 6 в цилиндрическую кинематическую пару А (четвертого класса) и с выходным звеном 4 в сферическую кинематическую пару В (третьего класса). Выходное звено 4 снабжено охватом 5 и соединяется с неподвижным звеном-стойкой 6 через цилиндрическую двухподвижную кинематическую пару С (четвертого класса). Ось пневмо или гидроцилиндра обозначается как O1O. Схват 5 взаимодействует с объектом воздействия, например с укупориваемой банкой 7.
Работает механизм следующим образом. При подаче рабочего агента - газа или жидкости в поршневую или штоковую полость пневмо- или гидроцилиндра 1 поршень 2 со штоком 3 получает возвратное вращательно-поступательное движение и через уголковый рычаг 3 передает это движение выходному звену 4, схват которого 5 получает поступательное и поворотное движения за счет цилиндрической кинематической пары С. Поступательное и поворотное движения схвата используются, например, для заворачивания укупорочных крышек на банке 7.
Уголковый рычаг 3 получает вместе с поступательным движением вращательное, потому что центр сферической пары В выполнен смещенным относительно оси O1O на величину е.
Известно, что подвижность пространственных механизмов определяется по формуле Малышева А.П., имеющей вид [1, стр.35, формула (2, 4)].

В этой формуле:
W - означает, скольким звеньям следует задать движение, чтобы все остальные звенья двигались вполне определенно,
n - число подвижных звеньев,
p5, р4, p3, p2, p1 - числа кинематических пар соответственно:
р5 - пятого класса (одноподвижные), р4 - четвертого класса (двухподвижные), р3 - третьего класса (трехподвижные), р2 - второго класса (четырехподвижные), p1 - первого класса (пятиподвижные).
В предлагаемом механизме число подвижных звеньев два - это уголковый рычаг 3, выполненный за одно целое с поршнем 2 пневмо- или гидроцилиндра 1, и выходное звено 4 со схватом 5, т.е. n=2, a кинематических пар всего три - это две цилиндрические кинематические пары четвертого класса А между поршнем 2 и цилиндром 1 и С между выходным звеном 4 и стойкой 6, а также сферическая пара третьего класса В между уголковым рычагом 3 и выходным звеном 4, т.е. р4=2, р3=1. По формуле (1) для приведенных значений n, р4 и р3 получим
W=6·2-4·2-3·1=1,
откуда следует, что предлагаемый пространственный трехзвенный поворотный механизм вполне работоспособен.
Источники информации
1. Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1975. 64-с.
2. Патент РФ 2305406, опубликован 10.09.2007. Бюл. №25.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
| ПРОСТРАНСТВЕННЫЙ ТЕСТОМЕСИЛЬНЫЙ МЕХАНИЗМ | 2006 |
|
RU2305406C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ | 2012 |
|
RU2513776C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| Трехзвенное кинематическое соединение с тремя относительными движениями | 2015 |
|
RU2610239C1 |
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| Кран-манипулятор с расширенной зоной действия | 2021 |
|
RU2768059C1 |
Изобретение относится к машиностроению. Трехзвенный поворотный механизм содержит приводной неподвижный пневмо- или гидроцилиндр с поршнем и со штоком, выполненным в виде уголкового рычага, и выходное звено. Уголковый рычаг связан с выходным звеном через сферическую кинематическую пару. Выходное звено связано с неподвижным звеном стойкой через цилиндрическую двухподвижную кинематическую пару. При этом выходное звено снабжено удерживающим охватом с возможностью получения поступательного движения и поворота относительно объекта воздействия. Решение направлено на обеспечение выходному звену поворотного движения. 1 ил.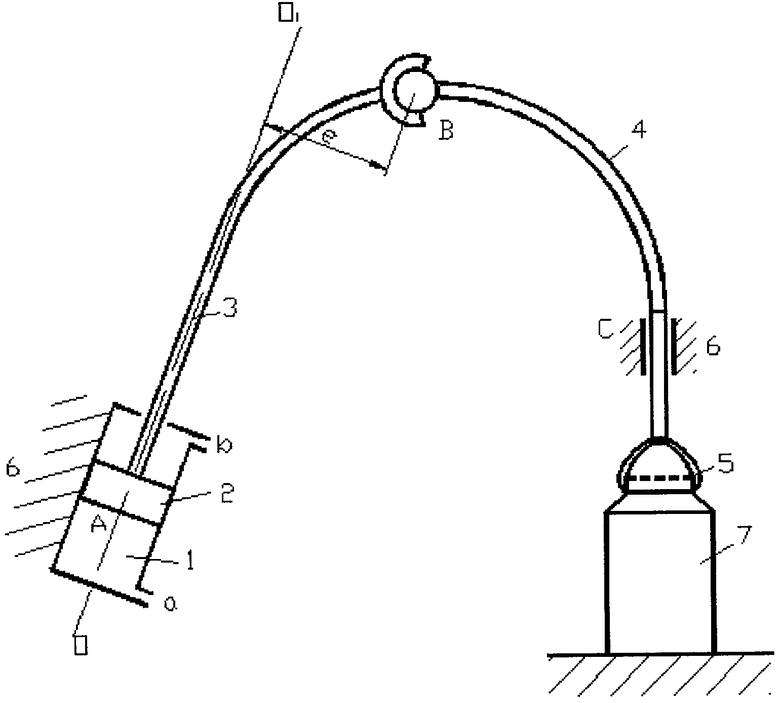
Пространственный трехзвенный поворотный механизм, включающий приводной неподвижный пневмо- или гидроцилиндр с поршнем и со штоком, выполненным в виде уголкового рычага, и выходное звено, отличающийся тем, что уголковый рычаг связан с выходным звеном через сферическую кинематическую пару, выходное звено связано с неподвижным звеном - стойкой через цилиндрическую двухподвижную кинематическую пару, при этом выходное звено снабжено удерживающим охватом, с возможностью получения поступательного движения и поворота относительно объекта воздействия.
| ПРОСТРАНСТВЕННЫЙ ТЕСТОМЕСИЛЬНЫЙ МЕХАНИЗМ | 2006 |
|
RU2305406C1 |
| Буровой манипулятор | 1985 |
|
SU1348511A1 |
| АРТОБОЛЕВСКИЙ И.И | |||
| Механизмы в современной технике | |||
| Том VII гидравлические и пневматические механизмы | |||
| - М.: Наука | |||
| Главная редакция физико-математической литературы, 1981, с.514 механизм №4067 | |||
| РЕШЕТОВ Л.Н | |||
| Самоустанавливающиеся механизмы: Справочник | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и доп | |||
| - М.: Машиностроение, 1985 | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |

