Изобретение относится к машиностроению и может быть использовано для соединения деталей машин.
Известны кинематические пары одно-, двух-, трех-, четырех- и пятиподвижные, то есть число степеней свободы звена кинематической пары в относительном движении может изменяться от 1 до 5 [1, стр.23, первая строка сверху]. Недостатком кинематических пар является малое число относительной подвижности звеньев, ограниченное числами от одного до пяти. На практике может потребоваться большее число подвижностей между звеньями, чем дает одна кинематическая пара, то есть более пяти.
Наиболее близким к заявленному относится трехзвенное кинематическое соединение (трекс) с шестью относительными движениями [2]. В этом трексе, включающем входное и выходное звенья, между входным и выходным звеньями установлено промежуточное звено, при этом входное звено образует с промежуточным звеном плоскостную кинематическую пару - параллелепипед на плоскости, промежуточное звено с выходным звеном - кинематическую пару - цилиндр на плоскости, а входное звено с выходным звеном образует точечную кинематическую пару - цилиндр на цилиндре.
Однако в некоторых случаях этого количества относительных движений между входным звеном и выходным оказывается недостаточно, например при работе схвата робота-манипулятора потребными являются его движения, исчисляющиеся десятками.
Задачей настоящего изобретения является увеличение количества относительных движений между звеньями.
Сущность заявляемого соединения заключается в том, что предлагается трехзвенное кинематическое соединение (треке) с семью относительными движениями, включающее входное и выходное звенья, в котором между входным и выходным звеньями установлено промежуточное звено, при этом входное звено образует с промежуточным звеном кинематическую пару - цилиндр на плоскости, промежуточное звено с выходным звеном также образуют кинематическую пару - цилиндр на плоскости, а входное звено с выходным звеном образуют точечную кинематическую пару - цилиндр на цилиндре.
Использованные в предлагаемом соединении отдельные пары известны, а именно цилиндр на плоскости [1, стр.24, рис.1.5] и цилиндр на цилиндре [3, стр.735, рис.б], однако совместное их применение в предлагаемом устройстве дает новый эффект, заключающийся в увеличении числа относительных движений до семи.
Общий вид предлагаемого соединения показан на чертеже.
Соединение состоит из входного звена 1, выходного звена 2, между которыми устанавлено промежуточное звено 3.
Работает соединение следующим образом.
Если звено 1 или звено 2 остановить, то относительно остановленного подвижное звено получит семь движений. Это доказывается следующим: рассматривая относительность движения, например, звена 2 относительно звена 1, подвижным останутся два звена (промежуточное звено 3 и выходное звено 2), то есть n=2 (n - число подвижных звеньев). В этом соединении используются три кинематические пары, а именно пары между звеньями 1 и 3, между звеньями 2 и 3, и между звеньями 1 и 2. Первая и вторая из этих пар есть пара цилиндр на плоскости, т.е. пара второго класса р2. Третья пара между звеньями 1 и 2 - точечная - соприкосновение двух цилиндров, она есть пара первого класса p1.
Если воспользоваться известной формулой Малышева А.П., имеющей вид [1, стр.35, формула (2.4)]

где W - означает подвижность соединения,
n - число подвижных звеньев, n=2;
p5, p4, p3, p2, p1 - число кинематических пар соответственно:
p5 - пятого класса (одноподвижные), p4 - четвертого класса (двухподвижные), p3 - третьего класса (трехподвижные), p2 - второго класса (четырехподвижные) p1 - первого класса (пятиподвижные), то при заданных парах p5=0, p4=0, p3=0, p2=2, p1=1, по этой формуле получим относительную подвижность звена 2 относительно звена 1, равную W=7. Это значение подвижности подтверждает, что представленное соединение (трекс) обладает семью относительными движениями.
Источники информации
1. Артоболевский И.И. Теория механизмов и машин. - М.: Наука, 1975. 640 с.
2. Дворников Л.Т. Попугаев М.Г., Трехзвенное кинематическое соединение (трекс) с шестью относительными движениями / Патент РФ №2332600 от 05.03.2007 г. Опубл. 27.08.2008. Бюл. №24.
3. Крайнев А.Ф. Механика машин. Фундаментальный словарь. - М: Машиностроение, 2000. - 904 с., ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЁХЗВЕННОЕ КИНЕМАТИЧЕСКОЕ СОЕДИНЕНИЕ (ТРЕКС) С ВОСЬМЬЮ ОТНОСИТЕЛЬНЫМИ ДВИЖЕНИЯМИ | 2014 |
|
RU2583323C1 |
| ТРЕХЗВЕННОЕ КИНЕМАТИЧЕСКОЕ СОЕДИНЕНИЕ (ТРЕКС) С ШЕСТЬЮ ОТНОСИТЕЛЬНЫМИ ДВИЖЕНИЯМИ | 2007 |
|
RU2332600C1 |
| Трехзвенное кинематическое соединение с тремя относительными движениями | 2015 |
|
RU2610239C1 |
| ПРОСТРАНСТВЕННЫЙ ТРЕХЗВЕННЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2009 |
|
RU2404384C2 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| УРАВНОВЕШЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2583329C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЁХПОДВИЖНЫМ ПРИВОДОМ | 2015 |
|
RU2595100C1 |
| ПРЕСС КРИВОШИПНЫЙ С КЛИНОВЫМ ПРИВОДОМ | 2000 |
|
RU2194621C2 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
Изобретение относится к машиностроению, может быть использовано для соединения деталей машин. Трехзвенное кинематическое соединение с семью относительными движениями включает входное, выходное и промежуточные звенья. Входное звено образует с промежуточным звеном кинематическую пару - цилиндр на плоскости. Промежуточное звено взаимодействует с выходным звеном через кинематическую пару - цилиндр на плоскости. Входное звено с выходным звеном образуют точечную кинематическую пару - цилиндр на цилиндре. Достигается увеличение количества относительных движений между звеньями. 1 ил.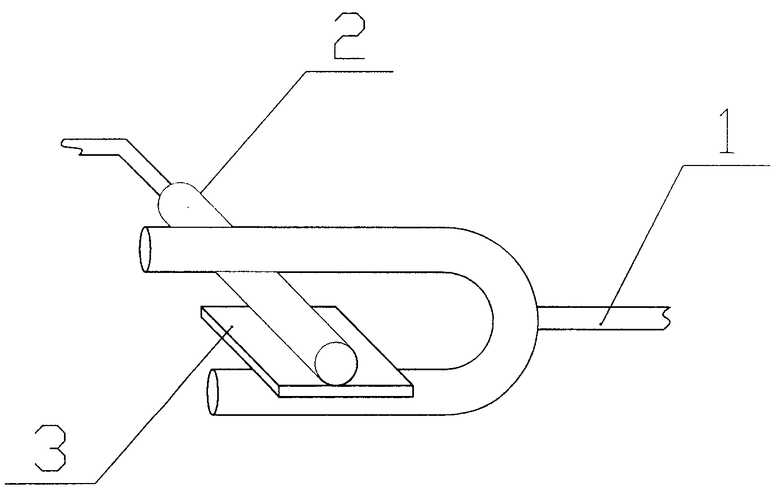
Трехзвенное кинематическое соединение (трекс) с семью относительными движениями, включающее входное, выходное и промежуточное звенья, отличающееся тем, что входное звено образует с промежуточным звеном кинематическую пару - цилиндр на плоскости, промежуточное звено с выходным звеном также образует кинематическую пару - цилиндр на плоскости, а входное звено с выходным звеном образуют точечную кинематическую пару - цилиндр на цилиндре.
| ТРЕХЗВЕННОЕ КИНЕМАТИЧЕСКОЕ СОЕДИНЕНИЕ (ТРЕКС) С ШЕСТЬЮ ОТНОСИТЕЛЬНЫМИ ДВИЖЕНИЯМИ | 2007 |
|
RU2332600C1 |
| Артоболевский И.И | |||
| Теория механизмов и машин, изд | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| и доп | |||
| - М.: Изд-во «Наука» главная редакция физико-математической литературы, 1975, параграфы 3-5, 11, рис.1.5, 1.6, 2.25, 2.26, табл.1 | |||
| Крайнев А.Ф | |||
| Механика машин | |||
| Фундаментальный словарь | |||
| - М.: Машиностроение, 2000, с.904 | |||
| FR 2886193 A1, 01.12.2006 | |||
| Устройство к дефектоскопу для сохранения постоянства зазора между преобразователем дефектоскопа и контролируемой поверхностью | 1977 |
|
SU739390A1 |

