Изобретение относится к машиностроению и может быть использовано при создании пространственных механизмов различного назначения.
Известен пространственный тестомесильный механизм [1], состоящий из гидроцилиндра возвратно-поступательного действия и тестомесильной лапы, при этом поршень со штоком гидроцилиндра выполнен за одно целое с уголковым рычагом, входящим со стойкой и с пространственным коромыслом в цилиндрические кинематические пары (четвертого класса), а пространственное коромысло, жестко соединенное с лапой тестомесильного механизма, соединено со стойкой через сферическую кинематическую пару (третьего класса). В этом механизме ведущее звено соединено со стойкой в кинематическую пару четвертого класса. Недостатком такого механизма является то, что используемая конструкция поршня не позволяет ему обеспечить более двух движений - поступательного вдоль оси цилиндра и вращательного вокруг той же оси.
Наиболее близким по своему устройству к предлагаемому механизму является пространственный шарнирный четырехзвенник [2] с четырехподвижным приводом, содержащий ведущее звено, шатун, коромысло и стойку. Ведущее звено соединено со стойкой через сферический поршень, который помещен в гидро- или пневмоцилиндр. Между сферическим поршнем и корпусом цилиндра установлен упругий элемент. При этом сферический поршень и шатун, шатун и коромысло, а также коромысло со стойкой образуют вращательные кинематические пары пятого класса - шарниры. Недостатком такого механизма является то, что в механизме содержатся четыре звена, что усложняет конструкцию.
Задачей изобретения является создание трехзвенного механизма, являющегося наиболее простым, содержащим в своем составе минимум звеньев.
Сущность заявляемого устройства заключается в том, что предлагается пространственный механизм с четырехподвижным приводом, состоящий из ведущего звена, соединенного со стойкой через сферический поршень, помещенный в гидро- или в пневмоцилиндр с установкой между сферическим поршнем и корпусом цилиндра упругого элемента, при этом сферический поршень выполнен за одно целое с уголковым рычагом, образующим цилиндрическую кинематическую пару с кривошипом, который входит со стойкой во вращательную кинематическую пару.
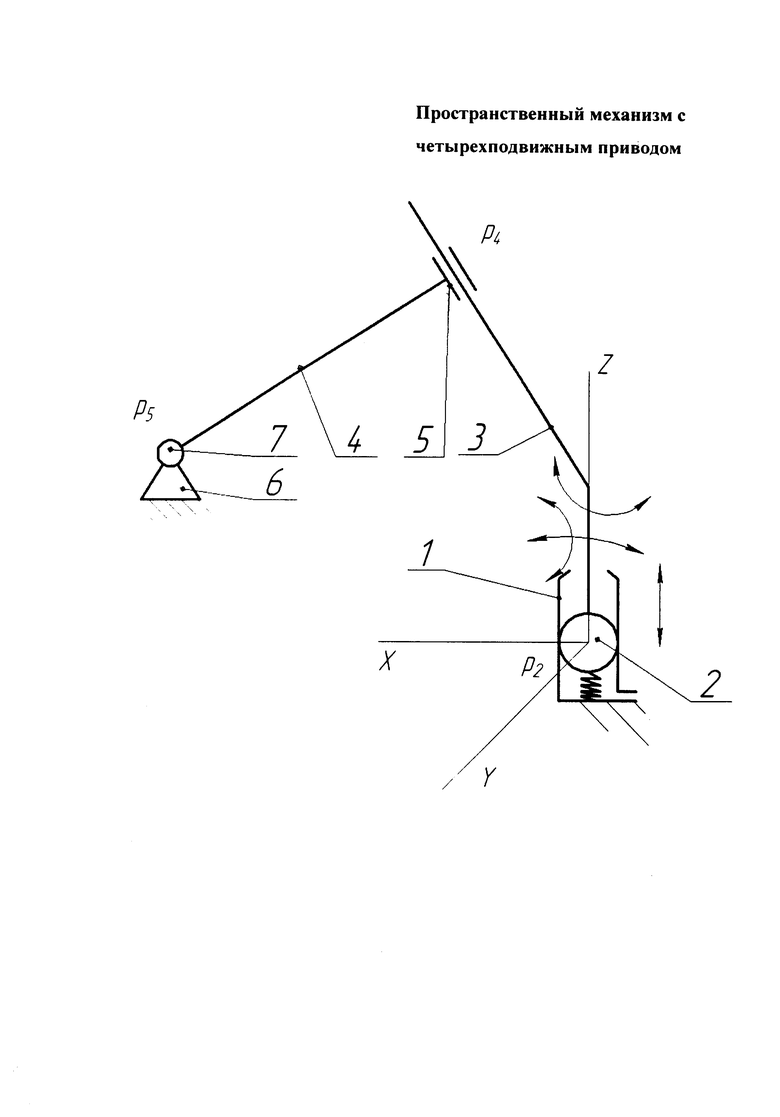
Общий вид предлагаемого пространственного механизма показан на чертеже.
Привод механизма состоит из неподвижного гидро- или пневмоцилиндра 1 со сферическим поршенем 2, выполненным за одно целое с уголковым рычагом 3. Сферический поршень помещен в гидро- или в пневмоцилиндр с установкой между сферическим поршнем и корпусом цилиндра упругого элемента. Сферический поршень 2 входит с корпусом цилиндра 1 в четырехподвижную кинематическую пару (пару второго класса), то есть имеет относительно стойки три вращательных и одно поступательное движение, а с кривошипом 4 в цилиндрическую кинематическую пару (пару четвертого класса) 5. Кривошип 4 входит со стойкой 6 во вращательную кинематическую пару (пару пятого класса) 7.
Работает механизм следующим образом. При подаче рабочего агента - газа или жидкости - в поршневую полость гидро- или пневмоцилиндра 1 сферический поршень 2 получает поступательное движение вдоль оси гидро- или пневмоцилиндра и принуждает уголковый рычаг 3 перемещаться относительно оси кинематической пары 5. При этом рычаг вместе со штоком и поршнем 2 гидроцилиндра 1 получает дополнительные зависимые вращательные движения вокруг осей X, Y, Z. При прекращении подачи рабочего агента под действием упругого элемента сферический поршень возвращается в первоначальное положение.
Известно, что подвижность пространственных механизмов определяется формулой Малышева А.П., имеющей вид [3, стр 35, формула (2, 4)]

В этой формуле W - означает, скольким звеньям следует задать движение, чтобы все остальные звенья двигались вполне определенно,
n - число подвижных звеньев,
р5, р4, р3, р2, p1 - число кинематических пар соответственно:
р5 - пятого класса (одноподвижные), р4 - четвертого класса (двухподвижные), р3 - третьего класса (трехподвижные), р2 - второго класса (четырехподвижные) p1 - первого класса (пятиподвижные).
В предлагаемом механизме число подвижных звеньев два - это уголковый рычаг 3, выполненный за одно целое со сферическим поршнем 2 цилиндра 1, и кривошип 4, т.е. n=2, а кинематических пар три - это вращательная пара пятого класса (р5) 7 между кривошипом 4 и стойкой 6, цилиндрическая пара четвертого класса (р4) 5 между уголковым рычагом 3 и кривошипом 4 и четырехподвижная кинематическая пара (р2) между сферическим поршнем 2 и корпусом цилиндра 1, т.е. р5=1, р4=1, p2=1.
По формуле (1) по приведенным значениям получим
W=6·2-5·1-4·1-2·1=1.
Откуда следует, что предлагаемый пространственный механизм вполне работоспособен.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| ПРОСТРАНСТВЕННЫЙ ТРЕХЗВЕННЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2009 |
|
RU2404384C2 |
| ПРОСТРАНСТВЕННЫЙ ТЕСТОМЕСИЛЬНЫЙ МЕХАНИЗМ | 2006 |
|
RU2305406C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬНЫЙ МЕХАНИЗМ | 2012 |
|
RU2484886C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ | 2012 |
|
RU2513776C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
| Поршневая машина | 1988 |
|
SU1613654A1 |
| Привод режущего аппарата | 1990 |
|
SU1762788A1 |
| МЕХАНИЗМ ДЛЯ ВЫЧЕРЧИВАНИЯ ПРОСТРАНСТВЕННЫХ КРИВЫХ | 2017 |
|
RU2668414C1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
Изобретение относится к машиностроению, а более конкретно к пространственным механизмам с четырехподвижным приводом. Пространственный механизм с четырехподвижным приводом состоит из ведущего звена, соединенного со стойкой через сферический поршень, помещенный в гидро- или в пневмоцилиндр. Между сферическим поршнем и корпусом цилиндра установлен упругий элемент. Сферический поршень, выполненный за одно целое с уголковым рычагом, взаимодействует с кривошипом через цилиндрическую кинематическую пару, а кривошип образует со стойкой вращательную кинематическую пару. Достигается упрощение конструкции. 1 ил.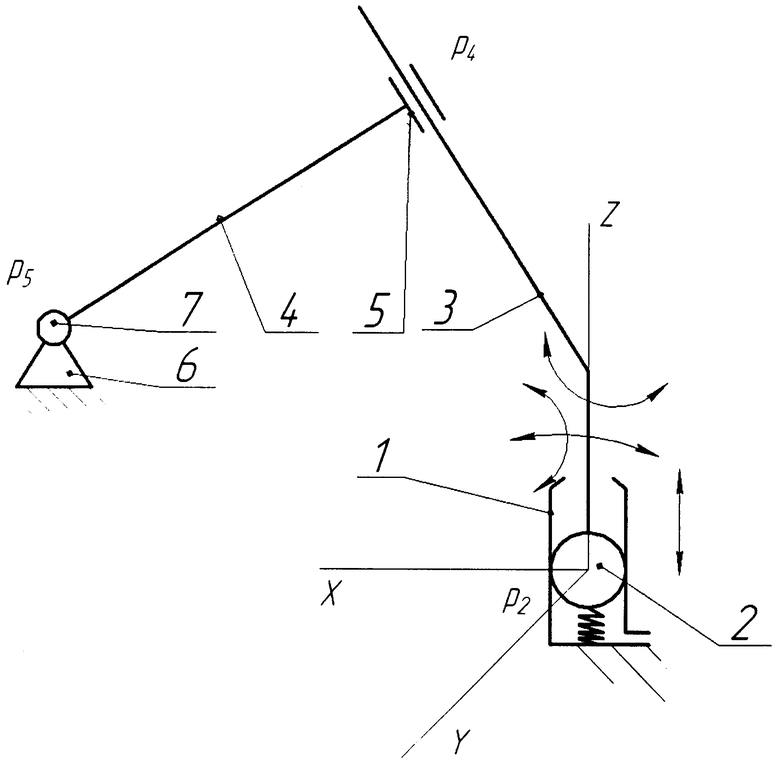
Пространственный механизм с четырехподвижным приводом, состоящий из ведущего звена, соединенного со стойкой через сферический поршень, помещенный в гидро- или в пневмоцилиндр с установкой между сферическим поршнем и корпусом цилиндра упругого элемента, отличающийся тем, что сферический поршень выполнен за одно целое с уголковым рычагом, образующим цилиндрическую кинематическую пару с кривошипом, который входит со стойкой во вращательную кинематическую пару.
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА (ВАРИАНТЫ) | 2010 |
|
RU2418713C1 |
| Артоболевский И.И | |||
| "Механизмы в современной технике", 2-е изд., переработанное | |||
| т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Саморазгружающаяся платформа | 1922 |
|
SU385A1 |
| JP 2005330889 A, 02.12.2005 | |||
| CN 101832262 A, 15.09.2010. | |||

