Изобретение относится к вычислительной технике, в частности к устройствам для ввода информации в ЭВМ.
Оно может быть использовано для ввода информации в ЭВМ в скоростных летательных или космических аппаратах и других транспортных или иных средствах, хотя бы временно подвергающихся действию сильных вибраций и перегрузок, для управления этими аппаратами, а также для высокоточного наведения управляемого оружия, в том числе и размещенного на этих аппаратах.
Известен и широко применяется способ ввода информации в ЭВМ с использованием клавиатуры и джойстика, при котором задействованы дисплей и блок управления.
Нажимая на клавиши клавиатуры или на джойстик, оператор инициирует передачу соответствующих электронных кодов на блок управления. Получая электронные коды, блок управления генерирует соответствующие управляющие команды.
Известно устройство по патенту РФ №2024048. Это устройство, не являясь предметом указанного патента, упоминается как вспомогательное средство и представляет собой двухслойные перчатки, между слоями которых монтируются контактные датчики, а также соединяющие их провода. Изобретение предназначено для ввода в ЭВМ информации о положении рук водителя на ободе рулевого колеса. Вспомогательное средство в форме перчатки применяется с целью фиксации датчиков касания на внутренней поверхности кисти руки водителя.
Известно устройство по патенту РФ №2251725. Согласно патенту на руке оператора фиксируют, надевая на кисть руки, устройство, содержащее конструктивный элемент в виде гибкой оболочки, имеющей форму, приближенную к форме кисти руки. Затем вызывают срабатывание чувствительных элементов надавливанием ими на часть тела самого оператора или на любой внешний объект.
Известно устройство по заявке на изобретение РФ №2004121053. Это устройство состоит из эластичных колец, каждое из которых надевается на фалангу пальца руки оператора. При этом на верхней внешней поверхности кольца закреплена тензонить.
Недостатком этих устройств является невозможность их использования в скоростных летательных аппаратах и в транспортных средствах, хотя бы временно подвергающихся действию сильных вибраций и перегрузок. Перегрузки воздействуют как на кисть руки, так и на джойстик и на чувствительные элементы. При достаточно высоких значениях перегрузок возможны самопроизвольные срабатывания чувствительных элементов. Оператор может просто не справиться с такими средствами ввода в условиях вибраций и перегрузок.
Технический результат, получаемый от предлагаемого изобретения, заключается в создании устройства, позволяющего осуществлять ввод информации в ЭВМ в скоростных летательных аппаратах и в транспортных средствах, подвергающихся действию сильных вибраций и перегрузок.
Указанный технический результат достигается за счет значительного снижения действия перегрузок или вибраций на органы управления и руку оператора путем использования эффекта гидрокомпенсации перегрузок.
Предложено устройство ввода информации - противоперегрузочный полиджойстик.
Оно содержит внешнюю оболочку, охватывающую кисть руки, внутри которой расположена внутренняя оболочка, имеющая форму кисти руки, а между оболочками напротив поверхности фаланг пальцев расположены чувствительные элементы.
Основные отличия заявляемого изобретения заключаются в следующем.
1. Внешняя оболочка выполнена прочной и жесткой, а внутренняя оболочка выполнена эластичной по форме руки оператора, причем обе оболочки соединены между собой в области, соответствующей положению запястья или предплечья, образуя внутреннюю герметичную полость.
2. Внутренняя герметичная полость устройства заполнена жидкостью, плотность которой равна средней плотности тела человека, т.е. в пределах 1.0-1.2 г/см3. Такой плотностью обладает, например, 12-15% раствор глицерина, ряд солевых растворов и иных жидкостей.
3. На нижней внутренней поверхности внешней оболочки напротив нижних поверхностей конечных фаланг пальцев кисти руки расположены управляющие датчики, соединенные своими чувствительными элементами в этих местах с эластичной внутренней оболочкой устройства.
4. В качестве управляющих датчиков в устройстве используются и/или трехкоординатные трехмерные, и/или двухкоординатные, и/или однокоординатные джойстики, и/или кнопки, и/или различные комбинации разных джойстиков и кнопок.
5. Устройство по п.1., отличающееся тем, что управляющие датчики и их чувствительные элементы выполнены из материалов, имеющих удельный вес, близкий к удельному весу тела человека, т.е. в пределах 0,9-1.6 г/см3. Такими материалами являются большинство современных пластмасс - полиэтилены, полипропилены, поликарбонаты, полиуретаны, углепластики, синтетические металлы типа полиэтилена, полипиррола и т.п.
6. Внутренняя полость с жидкостью соединена трубопроводом с насосом и резервуаром для временного слива и хранения жидкости или поршневым устройством, позволяющим изменять количество жидкости во внутренней полости устройства.
7. В месте соединения эластичной и жесткой оболочек располагают устройство для фиксации руки оператора к прочному элементу корпуса средства, в котором ведется ввод информации в ЭВМ, например транспортного средства или к гиростабилизированной поверхности.
8. Внешняя оболочка неподвижно соединена или с прочным элементом корпуса транспортного средства, или с гиростабилизированной поверхностью в зоне удобной досягаемости оператора.
В некоторых случаях, когда возможные перемещения невелики или не опасны для оператора, а требования к точности ввода существенны, целесообразно осуществлять фиксацию руки и устройства к гиростабилизированной поверхности, которая в свою очередь крепится к прочному элементу корпуса транспортного средства. Такие требования могут предъявляться, например, при управлении микрохирургическими манипуляторами или при вводе точной информации на ходу транспортных средств. Например, при ручном управлении с борта вертолета бомбами с телевизионными средствами наведения при их прицеливании на малоразмерные цели.
9. Для удобства работы и наблюдения за положением руки внешняя и внутренняя оболочка выполнены прозрачными, а внутренняя герметичная полость заполнена прозрачной жидкостью.
Размещение рук и чувствительных элементов в жидкости, плотность которой близка к средней плотности тела человека, т.е. в пределах 1.0-1.2 г/см3 (например, 12-15% раствор глицерина), а также фиксация рук и самого устройства управления позволяет в значительной степени компенсировать действие перегрузок и вибраций. В устройстве используется известный физический эффект гидрокомпенсации перегрузок, который обеспечивает, например, целостность тонкой скорлупы яйца при сбрасывании его с большой высоты в резервуаре с жидкостью. При этом действующая перегрузка полностью компенсируется жидкостью, и скорлупа остается целой. Если же сбросить яйцо с гораздо меньшей высоты, но без прочной оболочки, заполненной жидкостью, то яйцо непременно разобьется.
Насос с трубопроводом и резервуаром предназначен для облегчения использования устройства. Насос управляется системой управления и откачивает часть жидкости из внутренней полости, когда там нет руки оператора. При этом эластичная внутренняя оболочка слегка расширяется. Это облегчает вкладывание в нее руки оператора перед началом сеанса управления. После вкладывания руки насос подает жидкость в полость, при этом внутренняя эластичная оболочка плотно обжимает поверхность руки оператора, обеспечивая постоянный контакт пальцев с чувствительными элементами.
При завершении работы насос откачивает жидкость из полости, эластичная оболочка вновь расширяется, облегчая извлечение руки из устройства.
Эти же функции могут выполняться простым поршневым устройством с ручным или автоматическим приводом поршня.
Предлагаемое изобретение поясняется чертежами:
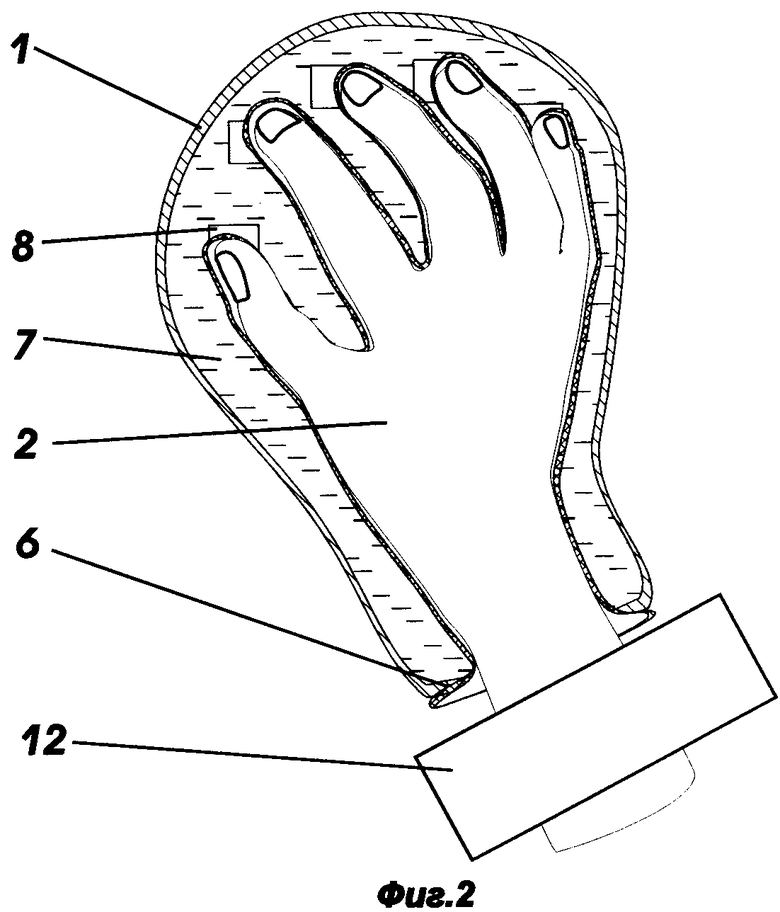
- на фиг.1 показано устройство без руки оператора;
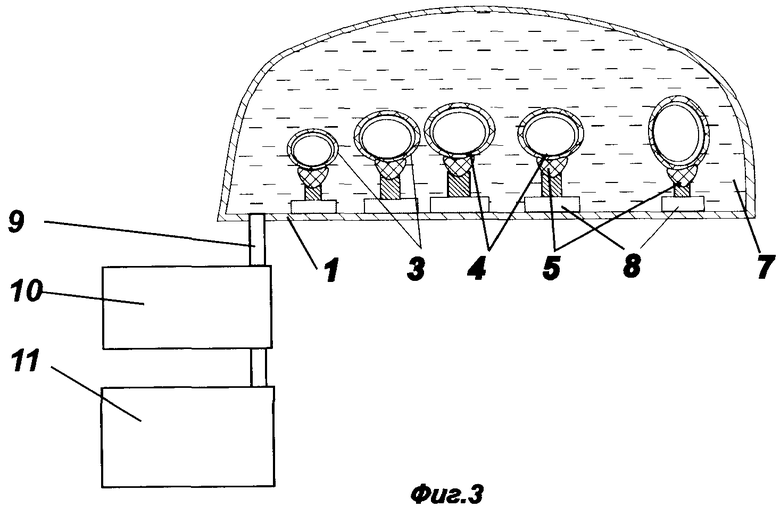
- на фиг.2 показано устройство с рукой оператора;
- на фиг.3 показан разрез устройства в плоскости размещения управляющих датчиков.
На фигурах 1-3 показаны:
1 - внешняя прочная и жесткая оболочка устройства;
2 - кисть руки;
3 - внутренняя эластичная оболочка;
4 - поверхности фаланг пальцев;
5 - чувствительные элементы;
6 - место соединения оболочек, соответствующее положению запястья или предплечья;
7 - внутренняя герметичная полость, заполненная жидкостью, плотность которой равна средней плотности тела человека;
8 - управляющие датчики;
9 - трубопровод;
10 - насос;
11 - резервуар для временного слива и хранения жидкости;
12 - устройство для фиксации руки оператора к прочному элементу корпуса.
Поршневое устройство, позволяющее изменять количество жидкости во внутренней полости и прочный элемент корпуса управляемого объекта на чертежах не показаны.
Устройство работает следующим образом.
Перед сеансом управления насос 10, управляемый, например, системой управления (не показана), откачивает часть жидкости из внутренней полости 7, когда там нет кисти руки 2 оператора. При этом внутренняя эластичная оболочка 3 слегка расширяется. Это облегчает вкладывание в нее кисти руки 2 оператора перед началом сеанса управления. После вкладывания руки насос 10 подает жидкость во внутреннюю полость 7, и внутренняя эластичная оболочка 3 плотно обжимает поверхность кисти руки 2 оператора, обеспечивая постоянный контакт пальцев с чувствительными элементами 5 управляющих датчиков 8 устройства.
После этого включается устройство 12 для фиксации руки оператора к прочному элементу корпуса, которое фиксирует кисть руки 2 оператора в неподвижном положении, прикрепляя ее к прочному элементу корпуса управляемого объекта в зоне удобной досягаемости оператора.
В процессе управления оператор нажимает концевыми фалангами пальцев руки в нужном направлении на чувствительные элементы 5 управляющих датчиков 8, которые вырабатывают необходимые сигналы управления.
Погружение рук и чувствительных элементов в жидкость, плотность которой близка к средней плотности тела человека, т.е. в пределах 1.0-1.2 г/см3 (например, 12-15% раствор глицерина), а также фиксация руки оператора и самого устройства управления позволяет в значительной степени компенсировать действие внешних перегрузок и вибраций, действующих на пальцы руки 2 оператора и на чувствительные элементы 5 управляющих датчиков 8 за счет действия известного физического эффекта гидрокомпенсации перегрузок.
Какие бы перегрузки и вибрационные воздействия не воздействовали на оператора, пальцы его руки 2 будут всегда надежно соединены с чувствительными элементами 5 управляющих датчиков 8, и на них не будет действовать ни вибрация, ни перегрузки.
При завершении работы насос 10 откачивает жидкость из внутренней полости 7, внутренняя эластичная оболочка 3 вновь расширяется под действием внешнего атмосферного давления, облегчая вынимание рук из устройства.
Предлагаемое изобретение позволяет решить задачу ввода информации в ЭВМ в условиях действия сильных перегрузок и вибраций. Оно позволяет обеспечить эффективное управление, например, спускаемым космическим аппаратом, на который действуют исключительно интенсивные вибрации. С его помощью можно осуществлять управление гиперзвуковыми летательными аппаратами, которые постоянно находятся в зоне воздействия вибраций и перегрузок, близких к предельным для человека.
Оно может быть использовано в микроманипуляторах, работающих с микроскопическими предметами, где не допускается действие случайных толчков или вибраций, например, при проведении нейрохирургических операций. Устройство может найти применение и в экстренной медицине, например, при проведении неотложных хирургических вмешательств с использованием управляемых ЭВМ хирургических микроманипуляторов прямо в транспортных средствах на ходу - в самолете, морском судне и даже в автомобиле.
Устройство может найти и военное применение для высокоточного наведения управляемых боеприпасов с борта движущихся транспортных средств. Например, при управлении с борта вертолета бомбами с телевизионными средствами наведения при их нацеливании (захвате) на отдельные малоразмерные мишени, движущиеся в потоке других аналогичных целей.
Устройство можно применять при вводе информации в ЭВМ в автотранспортных средствах, например танках или боевых машинах разведки или наведения, двигающихся по пересеченной местности и в вертолетах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ - ПОЛИДЖОЙСТИК ДЛЯ ГИПЕРМАНЕВРЕННОГО УПРАВЛЕНИЯ | 2012 |
|
RU2497177C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭВМ И УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 2003 |
|
RU2251725C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ПЕРЧАТКА ДЛЯ ВОДИТЕЛЯ ТРАНСПОРТА, ПРЕПЯТСТВУЮЩАЯ ДРЕМОТЕ ЗА РУЛЕМ | 2011 |
|
RU2455694C1 |
| УСТРОЙСТВО И СПОСОБ ИМИТАЦИИ И ПЕРЕДАЧИ КОНТАКТНЫХ ЭКСТЕРОЦЕПТИВНЫХ ОЩУЩЕНИЙ | 2017 |
|
RU2708949C2 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2765237C2 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2012 |
|
RU2493580C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2141685C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ОБЩЕЙ ЧУВСТВИТЕЛЬНОСТИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2021 |
|
RU2762857C1 |
| ЛЫЖНАЯ ПАЛКА С ПОДОГРЕВАЕМОЙ РУКОЯТКОЙ | 2016 |
|
RU2625089C1 |
| СПОСОБ РУЧНОГО ВВОДА ДАННЫХ В КОМПЬЮТЕР И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 1996 |
|
RU2121706C1 |
Изобретение относится к вычислительной технике, в частности к устройствам для ввода информации в ЭВМ. Технический результат изобретения заключается в создании устройства, позволяющего осуществлять ввод информации в ЭВМ в скоростных летательных, космических или иных транспортных средствах, подвергающихся действию сильных вибраций и перегрузок. Указанный технический результат достигается за счет значительного снижения действия перегрузок или вибраций на органы управления и руку оператора путем использования эффекта гидрокомпенсации перегрузок. 6 з.п. ф-лы, 3 ил.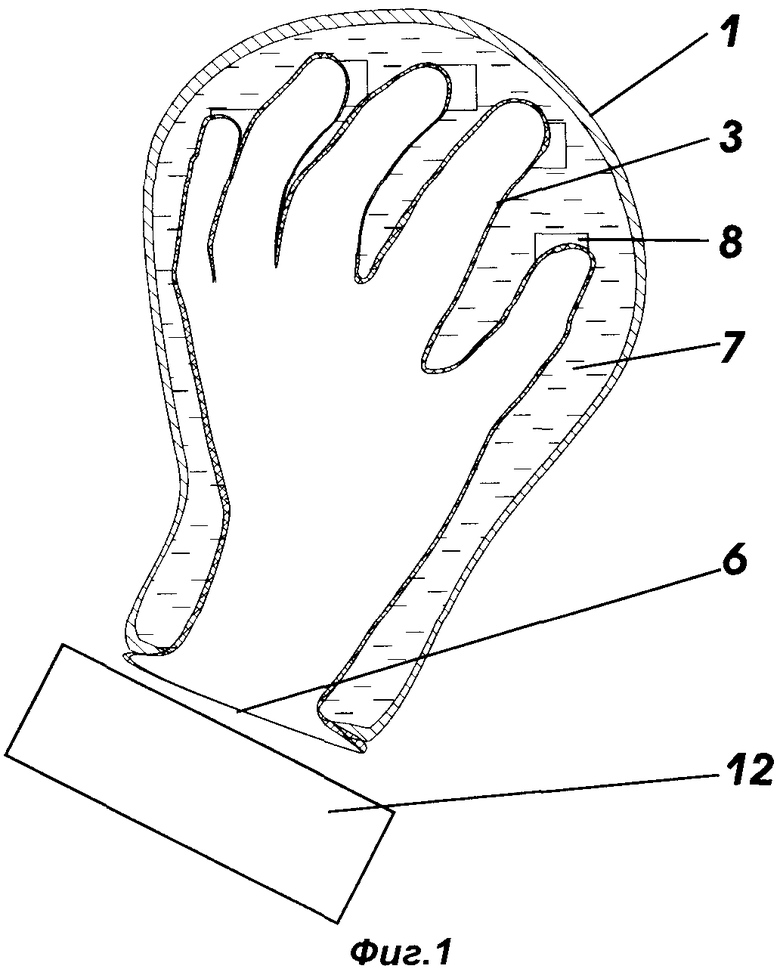
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭВМ И УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 2003 |
|
RU2251725C2 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 1991 |
|
RU2024048C1 |
| ЧУГУН | 2006 |
|
RU2305714C1 |
| US 6128004 А, 03.10.2000 | |||
| Штамп для безоблойной штамповки | 1982 |
|
SU1026918A1 |

