Изобретение относится к вычислительной технике, в частности к устройствам для ввода информации в ЭВМ.
Оно может быть использовано для ввода информации в ЭВМ в скоростных летательных или космических аппаратах и других транспортных или иных средствах, хотя бы временно подвергающихся действию сильных вибраций и перегрузок, для управления этими аппаратами, а также для высокоточного наведения управляемого оружия, в том числе и размещенного на этих аппаратах.
Известен и широко применяется способ ввода информации в ЭВМ с использованием клавиатуры и джойстика, при котором задействованы дисплей и блок управления.
Нажимая на клавиши клавиатуры или на джойстик, оператор инициирует передачу соответствующих электронных кодов на блок управления. Получая электронные коды, блок управления генерирует соответствующие управляющие команды.
Известен патент США US7170420 «Эргономичный пульт дистанционного управления телевидения» для передачи управляющих сигналов на телевизор, видеомагнитофон или DVD. На пульте (по патенту ручке управления) расположено множество переключателей для управления телевизором одной рукой, позволяющих управлять громкостью звука телевизора, отключением звука, переключением каналов (вверх и вниз). Ручка управления может быть запрограммирована пользователем. Микропроцессор сохраняет выбранные пользователем, программирует телевизионные каналы и позволяет включать их указательным пальцем.
Известен патент США US 7379052 «Наручные устройства управления компьютером», по которому устройство крепится к руке ремнем или другими способами, а управляющим элементом устройства может быть трекбол, джойстик, сенсорная панель или другое устройство, которым можно управлять большим пальцем пользователя и в сочетании с одним или несколькими переключателями нажимаемыми кончиками пальцев, что обеспечивает функциональную эквивалентность стандартной компьютерной мыши или трекбола.
Недостатками аналогов является функциональная неравномерность нагрузки на пальцы. Практически все функции пульта выполняются большим пальцем руки, а остальные пальцы руки бездействуют. Это снижает эффективность и скорость управления.
Известно устройство по патенту РФ №2024048. Это устройство, не являясь предметом указанного патента, упоминается как вспомогательное средство и представляет собой двухслойные перчатки, между слоями которых монтируются контактные датчики, а также соединяющие их провода. Изобретение предназначено для ввода в ЭВМ информации о положении рук водителя на ободе рулевого колеса. Вспомогательное средство в форме перчатки применяется с целью фиксации датчиков касания на внутренней поверхности кисти руки водителя. Недостатком устройства является его избыточность. Несмотря на то, что в нем все пальцы руки могли бы быть функционально нагружены равномерно, такое устройство кроме управляющих сигналов передает множество помех, которые возникают при естественном шевелении пальцев оператора. Отличить, где сигнал управления, а где ошибка в таких устройствах, достаточно сложно.
Прототипом является решение, изложенное в патенте РФ №2333527 «Устройство ввода информации в ЭВМ - противоперегрузочный полиджойстик».
Согласно патенту №2333527 устройство содержит внешнюю оболочку, охватывающую кисть руки, внутри которой расположена внутренняя оболочка, имеющая форму кисти руки, а между оболочками напротив поверхности фаланг пальцев расположены чувствительные элементы. На нижней внутренней поверхности внешней оболочки напротив нижних поверхностей конечных фаланг пальцев руки расположены управляющие датчики, соединенные своими чувствительными элементами в этих местах с эластичной внутренней оболочкой устройства. В качестве управляющих датчиков используются двухкоординатные или однокоординатные джойстики, или кнопки, или различные комбинации разных джойстиков и кнопок.
В прототипе внешняя оболочка неподвижно соединена или с прочным элементом корпуса средства, в котором ведется ввод информации в ЭВМ, например транспортного средства или управляемого объекта, или с гиростабилизированной поверхностью, в зоне удобной досягаемости оператора.
Недостатком прототипа является высокий уровень помех и неудобство пользования, так как руки быстро устают, постоянно находясь в положении, показанном на рисунках к описанию патента.
Известны устройства ввода информации в бортовые ЭВМ, содержащие две ручки управления в виде двух джойстиков. Такие системы управления используются в кабинах крупных самолетов («Boeing 737», «Airbus A320» и т.п.), или космических аппаратов («Шаттл», «Буран»), управляемых двумя пилотами (космонавтами). В них у кресла каждого пилота установлено по одной ручке управления в виде джойстика, средняя часть которого часть имеет форму, адаптированную для охвата кистью руки, а в верхней части каждого джойстика установлен, как правило, один двухкоординатный миниджойстик и другие средства управления, например многопозиционные переключатели, средства индикации в виде светодиодов или ламп. Ручки управления в виде джойстиков, на которых установлено больше одного двухкоординатного миниджойстика, неизвестны.
Недостатком таких решений является сложность управления аппаратом, совершающим маневры с высокими перегрузками.
В патенте РФ №2333527 «Устройство ввода информации в ЭВМ - противоперегрузочный полиджойстик» на рисунках показаны два симметричных устройства для левой и правой руки, содержащие по пять миниджойстиков. Однако они не имеют формы ручек управления. Это приводит к появлению высокого уровня помех от случайного перемещения пальцев и является недостатком устройства.
Технический результат, получаемый от предлагаемого изобретения, заключается в создании устройства, позволяющего чрезвычайно быстро и легко формировать команды управления для гиперманевренных скоростных летательных и космических аппаратов, как в условиях действия сильных вибраций и перегрузок, так и при дистанционном управлении.
Термин «сверхманевренность» в Википедии определяется как «способность некоторых самолетов сохранять устойчивость и управляемость на закритических углах атаки с высокими перегрузками…» http://ru.wikipedia.org/wiki/сверхманевренность)
В статье «Беспилотникам принадлежит будущее военной авиации? [Интернет-издание "Военный паритет",15.10.11, http://www.militaryparitet.com/perevodnie/data/ic_perevodnie/1735] термин «гиперманевренность» раскрывается как «чрезвычайно высокая маневренность, особенно по боковым ускорениям, выдержать которые пилот не может». В данном описании термин «гиперманевренность» применяется именно в таком понимании.
В свое время технология «стелс» стала базовой идеей истребителей «невидимок» 5-го поколения. Теоретически американский истребитель «невидимка» F-22 способен расстрелять целое звено МиГ-31 еще до того, как будет обнаружен. Это существенно изменило тактику воздушного боя. Современные воздушные сражения ведутся по принципу «первым увидел - первым сбил». Маневренность была отодвинута на второй план. С появлением у конкурентов технологии «стелс» ее преимущества постепенно нивелируются. При схватке F-22 с новейшим российским истребителем 5-го поколения Т-50 (ПАК-ФА) «невидимка» теряет свои преимущества. Поэтому многие эксперты считают, что исход сражения двух малозаметных истребителей вновь будет определяться их маневренностью. Многие эксперты считают, что гиперманевренностью будут обладать, прежде всего, беспилотные аппараты.
Особенностью современных зенитных ракет является их способность поражать цели, маневрирующие с ускорениями, не превышающими 15-17g. Но они и не проектировались для этого. Задача ракеты - догнать цель и поразить ее издалека широким пучком поражающих элементов. Если цель будет способна маневрировать с ускорениями, превышающими 17-20 g, и вовремя увидит подлетающую ракету, то она успеет выйти из зоны поражения. Следовательно, если добиться маневренности самолета, превышающей 17-20 g, - он станет неуязвим для ракет противника.
Однако управлять аппаратом, совершающим маневры с высокими перегрузками, с помощью ручек управления (РУ) в виде джойстиков становится очень сложно. Даже если производится управление беспилотником, время перемещения ручки управления из одного крайнего положения в другое должно составлять десятые доли секунды. Практика показывает, что скоростные маневры, требующие многократно и быстро произвести полный ход ручки управления в виде джойстика, очень трудно осуществлять даже в условиях, когда на пилота не действует перегрузка. У обычного джойстика слишком большой полный ход - при переводе из одного крайнего положения в другое он равен примерно 150 мм. При скорости руки в 2 м/с время каждого перехода составит tд = 0,15 / 2,0 = 0,075 c. А осуществить многократные перемещения ручки управления из одного крайнего положения в другое при маневрах в условиях действия большой перегрузки будет чрезвычайно сложно. Полноценное управление в таких условиях становится невозможным.
Указанный технический результат достигается за счет применения миниджойстиков с малым ходом управляющих рукояток, расположенных на ручке управления.
Основные отличия заявляемого изобретения заключаются в следующем.
Отличия по п.1 формулы
1.1 Каждая ручка управления выполнена в виде фигуры, от верхней части которой отходит в сторону или огибает ручку управления фигурная полка. На фигурной полке ручки управления установлено не менее одного миниджойстика.
Во всех известных реализациях джойстиков миниджойстики устанавливались в верхней части ручки управления и приводились в действие одним большим пальцем руки. В предлагаемом варианте миниджойстики дополнительно расположены на фигурной полке в области досягаемости подушечки первой фаланги среднего или указательного пальцев руки пилота, охватывающей ручку управления. Это отличие позволяет дополнительно включить в процесс управления указательный или безымянный палец, что расширяет маневренные возможности системы управления.
1.2. В нижней части места отхода фигурной полки от средней части ручки управления установлен, по крайней мере, еще один миниджойстик.
Во всех известных реализациях джойстиков в верхней части ручки управления в зоне досягаемости указательного пальца размещались различные курки для управления оружием или кнопки. Установка в этой области миниджойстика позволяет расширить функциональность системы за счет более полного использования возможностей указательного пальца. Используя миниджойстик, можно формировать более сложные и функциональные сигналы управления. Например, при использовании миниджойстика вместо курка, можно подавать не только сигналы типа «0» и «1», но и сигналы, дифференцированные по направлению, т.е. «Х» и «У» Система понимает, что произведено нажатие вниз, влево или право. Это позволяет формировать более сложные сигналы управления. В известных системах управления этого нет. Следовательно, отличий 1.1 и 1.2 нет в известных решениях, поэтому они могут считаться новыми.
Отличия по п.2 формулы
2. Устройство содержит ручку управления для левой руки и ручку управления для правой руки, которые являются зеркальными копиями друг друга, а их функции разделяются на «основную» и «вспомогательную» в зависимости от того, является ли оператор левшой либо правшой, и устанавливаются оператором программным путем.
2.1. В известных системах управления, например, самолетами, как правило, используется по одному джойстику на пилота. При этом джойстики установлены либо посередине, либо справа от пилота, и не дифференцированы для управления левой или правой рукой. От этого ухудшается функциональность устройства. В предлагаемом решении ручки управления установлены по две штуки на одного пилота, что позволяет полностью задействовать возможности его рук по управлению аппаратом. Зеркальность создает максимальные удобства для пилота, так как ручки управления адаптированы к анатомическим особенностям каждой руки.
Следует заметить, что в прототипе, на рисунке к патенту №2333527, тоже показаны две симметричные части полиджойстика. Хотя в формуле изобретения и описании патента ничего не сказано о функциональном смысле симметричности противоперегрузочного полиджойстика, тем не менее, наличие двух симметричных частей прототипа может считаться зеркальностью конструкции, а значит, в какой-то степени может считаться известным решением. Однако в рамках ограничительной части формулы изобретения настоящей заявки, по которой заявляется «устройство ввода информации, содержащее не менее двух ручек ручек управления, … средняя часть которых имеет форму, адаптированную для охвата кистью руки», это отличие является новым, так как у прототипа вообще отсутствуют ручки управления, охватываемые кистями рук, что порождает множество помех, являющихся его ключевыми недостатками.
2.2. Пилот в зависимости от своих анатомических особенностей сам выбирает, какая ручка у него будет «основная», а какая «вспомогательная» в зависимости от того, является ли он левшой либо правшой. В зависимости от выбора оператора функции ручек устанавливаются программным путем. Это позволяет максимально адаптировать систему управления к особенностям пилота и повышает маневренность аппарата в целом.
Отличий 2.1 и 2.2 нет в известных решениях, поэтому они могут считаться новыми.
3. Функции миниджойстиков, расположенных на ручках управления, устанавливаются оператором программным путем. В принципе изменение функций отдельных приборов программным путем известны. Но в рамках пункта 2.2 отличие 3 может считаться дополняющим и новым.
4. Ручки управления соединены с объектом управления неподвижно или с возможностью регулировки их положения.
Во всех известных устройствах ручки управления подвижны и должны отклоняться для управления аппаратом. В предложенном устройстве все управление аппаратом осуществляется миниджойстиками, расположенными на ручках управления, поэтому необходимость в подвижности ручек управления отпадает и они используются как разгрузочные ручки, за которые пилот может держаться при действии на него перегрузок, и снимающие нагрузку с рук. Для управления гиперманевренными аппаратами (ГМА) в условиях непосредственного пилотирования и действия перегрузок ручки управления могут быть прочно соединены с объектом управления (с возможностью регулировки их расположения перед полетом), при этом пилот имеет возможность, держась за них, снимать перегрузки, действующие на его тело и руки, сосредотачиваясь на управлении пальцами.
Такого отличия в известных решениях в рамках ограничительной части нет, поэтому оно может считаться новым.
5. Ручки управления установлены неподвижно на общем или на раздельных основаниях, имеющих возможность свободного перемещения. Такой вариант устройства удобно применять при управлении беспилотными летательными аппаратами с земли. Для условий дистанционного управления и компьютерных игр ручки управления могут быть установлены на общем или на раздельных основаниях, имеющих возможность свободного перемещения по рабочему столу оператора.
Такого отличия в известных решениях в рамках ограничительной части нет, поэтому оно может считаться новым.
Предлагаемое изобретение поясняется фигурами 1-3:
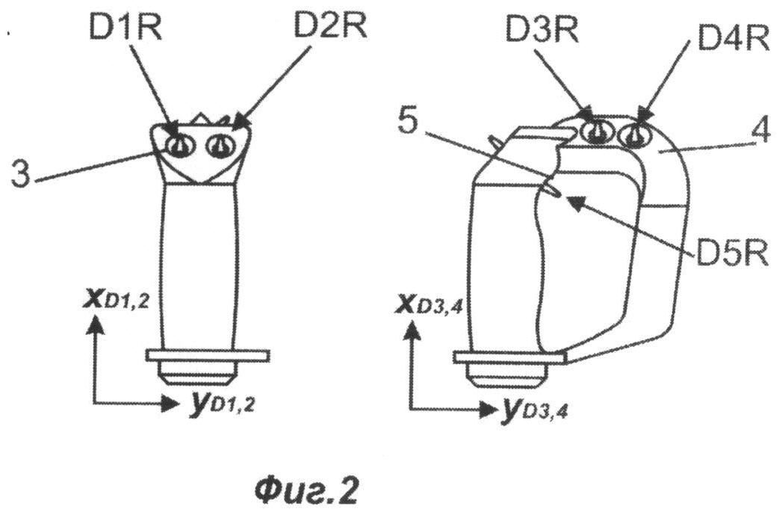
- на фиг.1 и 2 показаны ручки управления с миниджойстиками;
- на фиг.3 показан вариант управления с использованием указательного и безымянного пальцев;
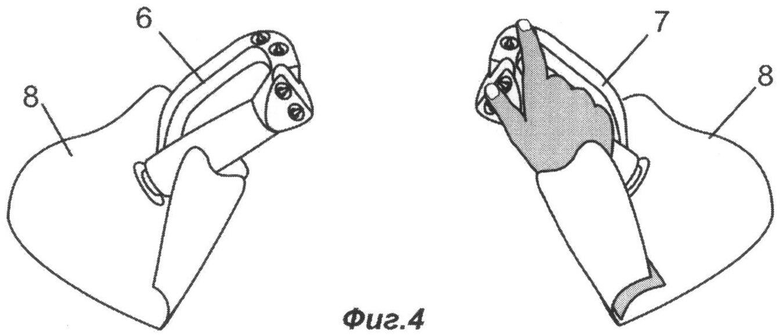
- на фиг.4 показаны ручки управления устройства, соединеные с объектом управления.
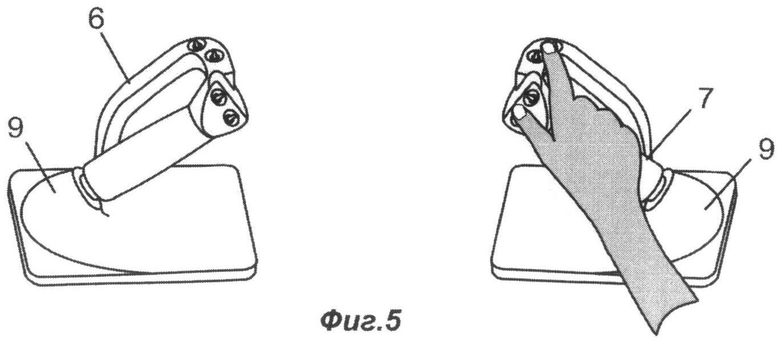
- на фиг.5 показаны ручки управления устройства, установленные на раздельных основаниях.
На фигурах 1-4 цифрами обозначены:
1 - ручка управления;
2 - средняя часть ручки управления;
3 - миниджойстик;
4 - фигурная полка;
5 - место отхода фигурной полки;
6 - ручка управления для левой руки;
7 - ручка управления для правой руки;
8 - объектом управления (корпус управляемого аппарата);
9 - общее или раздельное основание ручки управления.
Варианты устройства, показанные на рисунках 1-4, состоят из двух ручек управления 1. Средняя часть ручек управления 2 имеет форму, адаптированную для охвата кистью руки. В верхней части ручек управления установлены два миниджойстика 3.
Каждая ручка управления 1 выполнена в виде фигуры, от верхней части которой отходит в сторону или огибает ручку управления фигурная полка 4, на которой тоже установлено два миниджойстика 3. В нижней части места отхода фигурной полки 5 от средней части ручки управления 2 установлен еще один миниджойстик. Всего каждая ручка управления содержит 5 миниджойстиков.
Устройство содержит ручку управления для левой руки 6 и ручку управления для правой руки 7, которые являются зеркальными копиями друг друга, а их функции разделяются на «основную» и «вспомогательную» в зависимости от того, является ли оператор левшой либо правшой, и устанавливаются оператором программным путем.
Функции миниджойстиков 3, расположенных на ручках управления 6 и 7, устанавливаются оператором программным путем.
Заявляются два варианта устройства. В первом варианте (фиг. 4) ручки управления 6 и 7 соединены с объектом управления неподвижно или с возможностью регулировки их положения. Этот вариант предназначен для использования в летательных аппаратах, подвергающихся действию перегрузок.
Во втором варианте (фиг.5) ручки управления 6 и 7 установлены на общем или на раздельных основаниях, имеющих возможность свободного перемещения. Этот вариант предназначен для использования в комфортных условиях, в игровых симуляторах, дистанционного управления гиперманевренными беспилотными аппаратами в условиях, когда оператор не подвергается действию перегрузок.
Устройство работает следующим образом. Перед сеансом управления, оператор выбирает какая ручка у него будет «основная», а какая «вспомогательная» в зависимости от того, является ли он левшой либо правшой. В зависимости от выбора оператора функции ручек управления 6 и 7 устанавливаются программным путем. Это позволяет максимально адаптировать систему управления к особенностям пилота и повышает маневренность аппарата в целом. Затем в зависимости от вида выполняемых задач оператором программным путем по известным алгоритмам устанавливаются функции всех десяти миниджойстиков 3, расположенных на ручках управления 6 и 7. Обычно это функции управления разнообразными агрегатами и системами самолета, космического аппарата и т.п. Процессы назначения функций и управление ЛА и КА с использованием заявляемого устройства относятся к способам управления, а поэтому подробно в рамках настоящей заявки на устройство не рассматриваются. После назначения функций оператор производит управление аппаратом.
Преимуществом устройства является возможность использования для управления трех ведущих и самых развитых пальцев руки одновременно. Этого нет ни в одном известном устройстве управления кроме игры на музыкальных инструментах. На фиг.3 слева показано одновременное управление большим, указательным и безымянным пальцами, а справа одновременное управление большим и указательным пальцами. Возможность одновременного управления сразу тремя пальцами каждой руки позволяет осуществлять управление ЛА и КА по сложнейшим траекториям, что должно повысить его шансы на победу в воздушном или космическом бою.
Известно, что 70-80 % поверхности кабин летательных аппаратов и космических кораблей заполнено коммутационными элементами в виде кнопок, тумблеров и переключателей. Большая часть их продублирована и используется редко, но в аварийных ситуациях они представляют собой травмоопасные элементы. Например, в системе управления орбитального комплекса «Буран» имелось 1037 коммутационных элементов различного типа в виде тумблеров, переключателей, регуляторов, а у «Шаттла» еще больше - 1666. Коммутационные элементы в кабине мешают размещению там подушек безопасности, которые могли бы спасти пилотов при аварийных посадках, снижают эргономичность систем управления, увеличивают их размеры и массу, усложняют управление в условиях дефицита времени, действия перегрузок и вибраций. Предложенное устройство ввода информации для гиперманевренных аппаратов при использовании многофункциональных или полиморфных переключателей поддерживает современную тенденцию виртуализации коммутационных элементов путем их отображения на дисплеях летательного аппарата. Чем больше кнопок, тумблеров и переключателей будут виртуальными, тем больше можно снизить вес систем управления. Например, суммарное сокращение веса систем управления «Бурана» и «Шаттла» за счет перевода всех коммутационных элементов в виртуальный вид могло бы достичь соответственно 300 и 500 кг.
Чистое время формирования управляющей команды без учета времени реакции пилота складывается из времени перемещения руки к органу управления t м и времени непосредственного действия на орган управления t д , т. е. T = t м + t д. Эти параметры существенно зависят от конструкции органов управления и их размещения. Время перемещения зависит от скорости руки V руки, которая в среднем равна 2 м/с, и расстояния R i до i-го органа управления, т. е. t м = R i / V руки . Усредненное время доступа к органам управления истребителя при среднем расстоянии до них в 0,48 м составит 0,24 с. В то же время максимальное время доступа пальцев пилота к миниджойстикам предлагаемого устройства при среднем расстоянии до них 36 мм будет равно 0,018 с. Следовательно, применение полиджойстиков позволяет сократить время доступа к органам управления более чем в 12 раз. Минимальное время совершения маневра, требующего произвести полный ход ручки управления на основе джойстика (примерно 150 мм) из одного крайнего положения в другое, составит tд = 0,15 / 2 = 0,075 c. В то же время полный ход ручки миниджойстика, не превышает 10 мм, а значит, время действия при скорости перемещения пальца 2 м/с составит tд = 0,01 / 2 = 0,005 c. Это примерно в 15 раз быстрее, чем при управлении обычным джойстиком.
Таким образом, предлагаемое изобретение позволяет создавать системы ввода информации, пригодные для управления гиперманевренными летательными и космическими аппаратами, в том числе и БПЛА, значительно ускоряет формирование управляющих команд, снижает вес систем управления.
Устройство может найти военное применение для управления гиперманевренными беспилотными летательными аппаратами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления пилотируемым летательным аппаратом вертикального взлета и посадки | 2019 |
|
RU2722651C1 |
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ - ПРОТИВОПЕРЕГРУЗОЧНЫЙ ПОЛИДЖОЙСТИК | 2006 |
|
RU2333527C1 |
| РУКОЯТКА БОКОВОЙ РУЧКИ ОРГАНА УПРАВЛЕНИЯ | 2012 |
|
RU2638049C2 |
| ЛОЖКА ДЛЯ ПРИЕМА ПИЩИ ЛЮДЬМИ С ВЕРХНИМ ПАРАПАРЕЗОМ, ТЕТРАПАРЕЗОМ | 2023 |
|
RU2818978C1 |
| Левосторонний предохранитель стрелкового оружия на базе автомата Калашникова | 2021 |
|
RU2759849C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| Устройство для обучения управлению подвижными объектами с помощью джойстиков | 2019 |
|
RU2724939C1 |
| КОМПЛЕКТ УСТАНАВЛИВАЕМЫХ ДОПОЛНИТЕЛЬНЫХ РУЧЕК ДЛЯ ОБОРУДОВАНИЯ (ОСНАЩЕНИЯ) ЛОПАТЫ | 2000 |
|
RU2231239C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2240956C2 |
| Способ интуитивного управления летательным аппаратом | 2018 |
|
RU2711770C1 |

Изобретение относится к устройствам ввода информации в ЭВМ. Технический результат заключается в создании устройства, позволяющего чрезвычайно быстро и легко формировать команды управления для гиперманевренных скоростных летательных и космических аппаратов в условиях сильных вибраций и перегрузок. Устройство содержит не менее двух ручек управления, в верхней части которых установлен, по меньшей мере, один миниджойстик, средняя часть имеет форму, адаптированную для охвата кистью руки, каждая ручка управления соединена с объектом управления неподвижно с возможностью регулировки положения под длину рук пилота, так что они используются как разгрузочные ручки, при этом пилот имеет возможность, держась за них, снимать перегрузки, действующие на его тело и руки, сосредотачиваясь на управлении пальцами, форма ручек управления выполнена в виде фигур, от верхней части которых отходит в сторону указательного и среднего пальцев руки или огибает ручку управления не менее одной фигурной полки, на которой установлено не менее одного миниджойстика. 3 з.п. ф-лы, 5 ил.
1. Устройство ввода информации - полиджойстик для гиперманевренного управления, содержащее не менее двух ручек управления, в верхней части которых установлен, по меньшей мере, один миниджойстик, а средняя часть имеет форму, адаптированную для охвата кистью руки, отличающееся тем, что для управления гиперманевренными скоростными летательными и космическими аппаратами в условиях действия сильных вибраций и перегрузок каждая ручка управления соединена с объектом управления неподвижно с возможностью регулировки положения под длину рук пилота, так что они используются как разгрузочные ручки, при этом пилот имеет возможность, держась за них, снимать перегрузки, действующие на его тело и руки, сосредотачиваясь на управлении пальцами, а форма ручек управления выполнена в виде фигур, от верхней части которых отходит в сторону указательного и среднего пальцев руки или огибает ручку управления не менее одной фигурной полки, на которой установлено не менее одного миниджойстика.
2. Устройство по п.1, отличающееся тем, что содержит ручку управления для левой руки и ручку управления для правой руки, которые являются зеркальными копиями друг друга, а их функции разделяются на «основную» и «вспомогательную» в зависимости от того, является ли оператор левшой либо правшой, и устанавливаются оператором программным путем.
3. Устройство по п.1, отличающееся тем, что в нижней части места отхода фигурной полки от средней части ручки управления установлен, по крайней мере, еще один миниджойстик.
4. Устройство по п.2, отличающееся тем, что функции миниджойстиков, расположенных на ручках управления, устанавливаются оператором программным путем.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 7170420 B2, 30.01.2007 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ С АНАЛОГОВЫМ ДЖОЙСТИКОМ (ВАРИАНТЫ) | 1996 |
|
RU2163159C2 |

