Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С. 9 и 10, рис. а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами - автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи изделий, выполненное в виде комбинированного механизма, содержащего исполнительный механизм с губками для захвата изделий, передаточный механизм, выполненный в виде рычажно-зубчатого механизма, и привода (патент 2177404 (РФ), опубл. в БИПМ, 2001. - 36 - прототип).
Основным недостатком прототипа является его неспособность перемещать передаваемые изделия по прямолинейной траектории. Возможность прямолинейного движения объекта манипулирования для некоторых технологических процессов является важным требованием, определяющим эффективность работы устройства.
Упомянутый недостаток прототипа вызван структурой его кинематической цепи, при которой выходные звенья исполнительного механизма с губками для захвата изделий совершают лишь поворотные движения. В некоторых реализуемых процессах и операциях такое движение губок снижает точность функционирования устройства.
Задачей настоящего изобретения является повышение точности функционирования устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод, выходное звено передаточного механизма и ведущее звено исполнительного механизма сопряжены между собой, при этом сопряжение выполнено в виде зубчатого зацепления.
Ведущее звено передаточного механизма выполнено в виде кулачка, а выходное - в виде коромысла, при этом последнее снабжено роликом для сопряжения с кулачком.
Ведущее звено исполнительного механизма выполнено в виде зубчатой рейки, при этом с рейкой шарнирно соединены выходные звенья механизма.
Комбинированный механизм содержит неподвижный копир с продольными фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительного механизма, при этом закрепление губок выполнено разъемным.
Зубчатое зацепление содержит зубчатый сектор, жестко закрепленный на свободном конце выходного звена передаточного механизма, при этом центр делительной окружности сектора совпадает с центром качания выходного звена.
На свободных концах выходных звеньев исполнительного механизма смонтированы ролики для взаимодействия с продольными фигурными пазами неподвижного копира.
Шарнирное соединение выходных звеньев исполнительного механизма с его ведущим звеном содержит палец, жестко закрепленный на конце упомянутого ведущего звена.
Ведущее звено исполнительного механизма подвижно сопряжено, по меньшей мере, с двумя жестко закрепленными направляющими.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между ними, обеспечивающими упрощение конструкции, возможность перемещения изделий по прямолинейной траектории и повышение точности функционирования. Предлагаемое устройство удовлетворяет первому условию работоспособности, т. е. структурной формуле кинематической цепи, определяемой формулой Чебышева:
W=3•n-2p5-p4=3•5-2•5-4=1,
где W - степень подвижности механизма при одном ведущем звене (кулачке);
n - число подвижных звеньев, n=5 (кулачок, коромысло, рейка, два выходных звена);
р5 - число низших кинематических пар, р5=5;
р4 - число высших кинематических пар, р4=4.
В предлагаемом устройстве нет системы гибкой связи между приводом и исполнительным механизмом. Это способствует точности функционирования устройства.
Выполнение сопряжения выходного звена передаточного механизма с ведущим звеном исполнительного механизма в виде зубчатого зацепления повышает точность функционирования устройства и позволяет обеспечить требуемый ход зубчатой рейки между позициями "охвата" и выдачи изделий.
Выполнение ведущего звена передаточного механизма в виде кулачка дает возможность обеспечить практически любой предпочтительный закон движения коромысла и кинематически связанной с ним рейки.
Выполнение ведущего звена исполнительного механизма в виде зубчатой рейки дает возможность решить задачу движения выходных звеньев исполнительного механизма по прямолинейной траектории.
Применение неподвижного копира с продольными фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма уменьшает энергозатраты на движение масс звеньев. В сравнении с прототипом копир предлагаемого устройства заменяет собой подвижный ползун, при этом оба упомянутых звена выполняют одну и ту же функцию.
Жесткое закрепление губок на выходных звеньях исполнительного механизма определяется тем, что губки должны имитировать движение выходных звеньев. Выполнение упомянутого закрепления разъемным вызвано тем, что такое закрепление обеспечивает возможность быстрой смены губок при переналадке устройства на передачу изделий другой формы.
Наличие зубчатого сектора на конце коромысла передаточного механизма дает возможность преобразовать возвратно-поворотное движение коромысла в возвратно-поступательное движение ведущего звена (рейки) исполнительного механизма. Такое движение рейки определяет прямолинейную траекторию движения выходных звеньев с губками для захвата изделий.
Применение роликов на выходных звеньях исполнительного механизма уменьшает износ рабочих профилей фигурных пазов неподвижного копира и таким образом способствует точности функционирования губок устройства.
Палец, жестко закрепленный на конце зубчатой рейки, является наиболее простым и надежным элементом шарнирной связи рейки с выходными звеньями исполнительного механизма. Жесткая связь пальца с рейкой обеспечивает высокую точность движения губок. Жесткое крепление пальца на рейке предпочтительнее других способов его крепления, главным образом, из-за точности функционирования губок.
Сопряжение ведущего звена исполнительного механизма, по меньшей мере, с двумя неподвижными направляющими дает возможность исключить упругие деформации (прогиб) рейки.
Предлагаемое устройство типа "рука" для передачи изделий поясняется чертежом, на котором представлена его кинематическая схема.
Устройство содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2 и исполнительного механизма 3 с губками 4 для захвата изделий, и привод 5.
Механизм 2 выполнен в виде кулачкового механизма, который включает ведущее звено - кулачок 6 и выходное звено - коромысло 7. На коромысле смонтирован ролик 8 для сопряжения с кулачком, на свободном конце коромысла жестко закреплен зубчатый сектор 9, центр делительной окружности которого совмещен с центром качания коромысла.
Механизм 3 включает ведущее звено - зубчатую рейку 10, взаимодействующую с зубчатым сектором 9, выходные звенья 11 и 12, шарнирно связанные с рейкой посредством пальца 13, и неподвижный копир 14 с фигурными пазами 15 и 16 для взаимодействия с выходными звеньями 11 и 12.
На выходных звеньях 11 и 12 жестко закреплены губки 4 для захвата изделий, при этом жесткое закрепление губок выполнено разъемным для возможности быстрой смены губок при переходе на передачу изделий другой формы. На свободных концах выходных звеньев смонтированы ролики 17 и 18 для взаимодействия с пазами 15 и 16 копира 14.
Кулачок 6 жестко закреплен на валу привода 5. Центр качания коромысла 7 совмещен с осью 19, закрепленной на стойке. Коромысло 7 снабжено пружиной 20 для сопряжения ролика 8 с кулачком 6. Зубчатая рейка смонтирована, по меньшей мере, в двух направляющих 21, а неподвижный копир 14 жестко закреплен на опоре 22.
Форма губок 4 соответствует форме передаваемых изделий. При захвате и переносе изделия обеспечивается жесткое сопряжение губок с изделием по большей части периметра последнего.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 5 вращательное движение кулачка 6 преобразуется посредством коромысла 7 с закрепленным на нем зубчатым сектором 9 в возвратно-поступательное движение рейки 10. При движении рейки ролики 17 и 18 выходных звеньев 11 и 12 взаимодействуют с фигурными пазами 15 и 16 копира 14, при этом губки 4 занимают разжатое или сжатое положение соответственно текущему положению упомянутых выходных звеньев 11 и 12.
Началу рабочего хода устройства соответствует его положение, при котором коромысло 7 и рейка 10 находятся в крайних положениях, соответствующих границе интервала рабочего и холостого ходов. В этом положении комбинированного механизма 1 губки 4 занимают разжатое положение и готовы к "схвату" изделия.
В интервале рабочего хода устройства губки 4 занимают сжатое положение, выполняя операцию переноса изделия в позицию выдачи, при этом губки удерживают изделие, переносимое по прямолинейной траектории. По завершении рабочего хода губки 4 разжимаются и перестают удерживать изделие, переданное из одной позиции в другую. В позиции выдачи изделия коромысло 7 и рейка 10 занимают другие крайние положения, при этом губки оказываются разжатыми до начала основного хода устройства.
В интервале кинематического (рабочего) цикла устройства губки 4 совершают сложное движение, состоящее из двух простых движений: возвратно-поступательного вместе с ведущим звеном 10 и возвратно-поворотного с выстоями относительно звена 10.
Выполнение сопряжения выходного и ведущего звеньев соответственно передаточного и исполнительного механизмов в виде зубчатого зацепления упрощает конструкцию, обеспечивает возможность перемещения изделий по прямолинейной траектории и повышает точность функционирования устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312763C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217297C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2012 |
|
RU2521934C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с ведущим и выходным звеньями и исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод. Выходное звено передаточного механизма и ведущее звено исполнительного механизма сопряжены между собой, при этом сопряжение выполнено в виде зубчатого зацепления. Изобретение позволит повысить точность функционирования устройства. 8 з.п. ф-лы, 1 ил.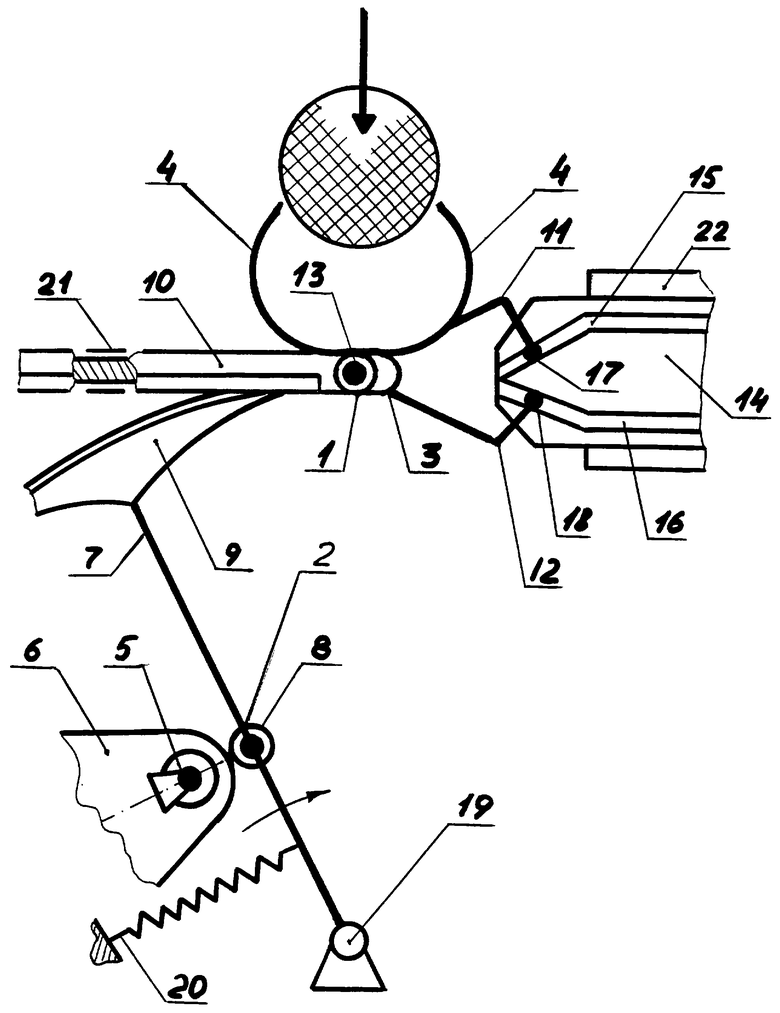
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

