Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис. а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа «рука» для передачи изделий, выполненное в виде комбинированного механизма, содержащего исполнительный механизм с губками для захвата изделий, передаточный механизм, выполненный в виде кривошипно-ползунного механизма с ползуном в виде зубчатой рейки, и привода (патент РФ №2177404, опубл. в БИПМ, 2001. - №36 - прототип).
Основным недостатком прототипа являются невысокие производительность и точность функционирования. Это связано с наличием системы гибкой связи для синхронизации движения ведущих кривошипов передаточного и исполнительного механизмов, сравнительно большим числом подвижных элементов и кинематических пар в цепи исполнительного механизма. Увеличенное число подвижных звеньев лимитирует частоту повторения рабочих циклов, снижая производительность, а зазоры в кинематических парах (в сопряжениях звеньев) и наличие гибких элементов не способствуют обеспечению высокой точности.
Задачей настоящего изобретения является повышение производительности и точности работы устройства.
Решение поставленной задачи достигается тем, что в устройстве типа «рука» для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном в виде зубчатой рейки и исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод, ведущее звено исполнительного механизма выполнено в виде поворотного стержня, подвижно сопряженного с выходным звеном передаточного механизма, выходные звенья шарнирно соединены с ведущим звеном и дополнительно кинематически с ним связаны.
Передаточный механизм выполнен в виде центрального кривошипно-ползунного механизма, который содержит шарнирно связанные кривошип, шатун и выходное звено-ползун, при этом механизм удовлетворяет условию
W=3·n-2р5-р4=3·3-2·4-0=1, (1)
где W - число степеней свободы выходного звена передаточного механизма, W=1;
n - число подвижных звеньев, n=3;
р5 - число низших кинематических пар, р5=4;
р4 - число высших кинематических пар, р4=0.
Подвижное сопряжение ведущего звена исполнительного механизма с выходным звеном передаточного механизма содержит зубчатое колесо для взаимодействия с зубчатой рейкой, при этом упомянутое колесо смонтировано на неподвижной оси и жестко связано с ведущим звеном исполнительного механизма.
Шарнирное соединение выходных звеньев исполнительного механизма с ведущим звеном содержит палец, жестко закрепленный на свободном конце ведущего звена.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительного механизма, при этом упомянутое закрепление губок выполнено разъемным.
Дополнительная кинематическая связь выходных звеньев исполнительного механизма с ведущим звеном включает ползун, подвижно сопряженный с ведущим звеном, шатуны, каждый из которых шарнирно соединен с ползуном и соответствующим выходным звеном, и неподвижный копир с фигурным пазом для взаимодействия с упомянутым ползуном, при этом на ползуне жестко закреплен палец для шарнирной связи с шатунами и смонтирован ролик для взаимодействия с фигурным пазом неподвижного копира.
Ползун выполнен в виде призмы со сквозным центральным отверстием для сопряжения с ведущим звеном, при этом отверстие имеет в сечении прямоугольную форму, а призма выполнена разъемной по длине, состоящей из двух жестко связанных элементов.
Ведущее звено исполнительного механизма имеет в поперечном сечении прямоугольную форму, при этом размеры прямоугольника соответствуют размерам сечения центрального отверстия в ползуне.
Фигурный паз выполнен в теле неподвижного копира в виде дуги, центр кривизны которой совпадает с осью поворотного движения зубчатого колеса, сопрягающего ведущее и выходное звенья соответственно исполнительного и передаточного механизмов, при этом концевые участки паза имеют переменную кривизну.
Ползун и выходные звенья в интервале рабочего и холостого ходов занимают фиксированное положение относительно ведущего звена, при этом ролик ползуна взаимодействует с фигурным пазом на участке постоянного радиуса, а на границах интервалов движения ползун и выходные звенья совершают дополнительные движения относительно ведущего звена, при этом упомянутый ролик взаимодействует с концевыми участками паза, причем комбинированный механизм удовлетворяет условиям:
при рабочем и холостом ходах соответственно
W=3·n-2р5-р4=3·4-2·5-1=1, (2)
где W - число степеней свободы каждого из выходных звеньев, W=1;
n - число подвижных звеньев: кривошип, шатун, ползун, ведущее звено, n=4;
р5 - число низших кинематических пар, р5=5;
р4 - число высших кинематических пар, рейка - зубчатое колесо, р4=1;
на границах интервалов движения соответственно
W=3·n-2р5-р4=3·7-2·9-2=1, (3)
где W - число степеней свободы каждого их выходных звеньев относительно ведущего звена, W=1;
n - число подвижных звеньев: кривошип, шатун, ползун передаточного механизма, ведущее звено, ползун исполнительного механизма, шатун, выходное звено, n=7;
р5=9; р4=2.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между ними, обеспечивающими в совокупности упрощение конструкции, повышение производительности и точности функционирования. В предлагаемом устройстве ведущее звено исполнительного механизма непосредственно связано с выходным звеном передаточного механизма. Это дало возможность исключить из схемы устройства подвижное основание и механизм поворота последнего. При этом упрощена конструкция, поскольку уменьшено число подвижных звеньев и кинематических пар. Кроме того, в предлагаемом устройстве нет системы гибкой связи между приводом и исполнительным механизмом. Это способствует повышению точности функционирования устройства.
Выполнение ведущего звена исполнительного механизма в виде поворотного стержня, подвижно сопряженного посредством зубчатого колеса с выходным звеном передаточного механизма, выполненным в виде зубчатой рейки, дает возможность обеспечивать большой угол размаха ведущего звена. Это позволяет использовать устройство для передачи изделий при увеличенном отстоянии одна от другой позиций «схват изделия» и «выдача изделия».Шарнирное соединение выходных звеньев с ведущим звеном и наличие дополнительной кинематической связи между ними обеспечивают поворотное движение выходных звеньев с выстоями относительно ведущего звена. В результате, губки для захвата изделий, жестко закрепленные на выходных звеньях, занимают необходимое разжатое или сжатое положение. При такой кинематической связи процесс разжатия или сжатия губок выполняется с высокой точностью.
Выполнение передаточного механизма в виде центрального кривошипно-ползунного механизма с выходным звеном в виде зубчатой рейки имеет свои преимущества: высокую точность реализации функции положения выходного звена, благоприятную функцию угла передачи в периоде кинематического цикла, определяющую силовую работоспособность механизма. Второе из упомянутых преимуществ отличает такой механизм от дезаксиального. Выполнение ползуна в виде зубчатой рейки упрощает связь передаточного механизма с исполнительным.
Применение зубчатой пары для подвижного сопряжения ведущего звена исполнительного механизма с выходным звеном передаточного механизма обеспечивает возможность выбора предпочтительного передаточного числа между упомянутыми звеньями. Такое сопряжение позволяет иметь любой необходимый угол размаха ведущего звена, несущего выходные звенья с губками для захвата изделий. Расширяются технологические возможности использования устройства.
Применение пальца для шарнирной связи выходных звеньев ^исполнительного механизма с его ведущим звеном является наиболее простым и технологичным решением, обеспечивающим необходимую точность сопряжения.
Жесткое закрепление губок на выходных звеньях исполнительного механизма вызвано тем, что губки должны имитировать движение выходных звеньев. Выполнение упомянутого закрепления разъемным вызвано тем, что такое закрепление обеспечивает возможность быстрой смены губок при переналадке устройства на передачу изделий другой формы.
Дополнительная кинематическая связь выходных звеньев исполнительного механизма с его ведущим звеном, включающая ползун, шатуны и копир с фигурным пазом, призвана обеспечивать необходимую точность поворотного движения с выстоями выходных звеньев относительно ведущего звена. Такая кинематическая связь звеньев исполнительного механизма обеспечивает достаточную точность функционирования губок в периоде кинематического цикла.
Выполнение ползуна в виде призмы и его сопряжение с ведущим звеном посредством сквозного отверстия прямоугольного сечения исключает возможность радиального разворота ползуна относительно продольной оси ведущего звена. Не возникает паразитных нагрузок от перекоса ползуна, повышается точность его движения. Разъемное выполнение ползуна обеспечивает необходимую технологичность его сборки и разборки.
Соответствие поперечного сечения ведущего звена сечению сквозного отверстия в ползуне обеспечивает связь этих звеньев при минимальных зазорах в сопряжении. Это повышает точность функционирования.
Выполнение большей части фигурного паза в виде дуги одного радиуса обеспечивает такое функционирование исполнительного механизма, при котором в период рабочего и холостого ходов промежуточные и выходные звенья механизма занимают фиксированное положение относительно ведущего звена, при этом губки занимают сжатое положение. На концевых участках паза, близких к границам интервалов рабочего и холостого ходов, все звенья исполнительного механизма начинают движение, поскольку ролик ползуна взаимодействует с участками паза иной (переменной) кривизны, при этом обеспечивается разжатие губок. Такой механизм надежно обеспечивает процесс разжатия и сжатия губок.
При рабочем и холостом ходах комбинированного механизма задействовано четыре подвижных звена: три звена передаточного механизма и ведущее звено исполнительного механизма, остальные звенья последнего занимают фиксированное положение. На участках, близких к границам интервалов движения, задействовано семь подвижных звеньев, при этом обеспечивается сжатие или разжатие губок. Формулы (1)-(3) характеризуют работоспособность механизмов, составляющих комбинированный многозвенный механизм.
Предлагаемое устройство типа «рука» для передачи изделий поясняется чертежом.
На чертеже представлена кинематическая схема устройства.
Устройство содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2, исполнительного механизма 3 с губками 4 для захвата изделий, и привод 5.
Механизм 2 включает ведущее звено 6, выполненное в виде кривошипа, жестко закрепленного на валу привода 5, выходное звено 7 в виде зубчатой рейки и промежуточное звено - шатун 8. Механизм 2 выполнен с нулевым эксцентриситетом, выходное звено 7 сопряжено с неподвижной направляющей 9.
Механизм 3 включает ведущее звено 10, выполненное в виде поворотного стержня, выходные звенья 11 и 12, шарнирно связанные с ведущим звеном, промежуточные звенья в виде ползуна 13, подвижно сопряженного с ведущим звеном, двух шатунов 14 и 15, каждый из которых шарнирно связан с упомянутым ползуном и соответствующим выходным звеном, и неподвижный копир 16 с фигурным пазом 17.
Ведущее звено 10 подвижно сопряжено с выходным звеном 7 передаточного механизма посредством зубчатого колеса 18, жестко закрепленного на конце ведущего звена и смонтированного на неподвижной оси 19. Шарнирная связь выходных звеньев 11 и 12 с ведущим звеном 10 содержит палец 20, жестко закрепленный на свободном конце ведущего звена.
Ползун 3 выполнен в виде призмы с продольным сквозным отверстием 21 прямоугольного сечения. Призма выполнена разъемной по длине, состоящей из двух жестко связанных элементов 22 и 23. На элементе 22 закреплен палец 24 для шарнирной связи с шатунами 14 и 15, на элементе 23 смонтирован ролик 25 для взаимодействия с фигурным пазом 17 копира 16. Концевые участки 26 и 27 фигурного паза 17 являются участками переменной кривизны.
Губки 4 для захвата изделий жестко закреплены на выходных звеньях 11 и 12, крепление губок выполнено разъемным. Форма губок соответствует форме передаваемых изделий. Звено 10 исполнительного механизма 3 в поперечном сечении имеет прямоугольную форму, соответствующую форме сквозного отверстия 21 в теле ползуна 13.
Устройство типа «рука» для передачи изделий работает следующим образом.
При работе привода 5 вращение кривошипа 6 преобразуется посредством шатуна 8 в возвратно-поступательное движение зубчатой рейки 7. Посредством зубчатого колеса 18 движение рейки 7 трансформируется в возвратно-поворотное движение ведущего звена 10. При положении звена 10 вблизи границы интервалов движения, т.е. вблизи одного из крайних положений, ролик 25 ползуна 13 взаимодействует с участком 26 или 27 фигурного паза 17, при этом упомянутый ползун, перемещаясь по ведущему звену, приходит в нижнее крайнее положение. Такое движение ползуна приводит к движению шатунов 14 и 15 и выходных звеньев 11 и 12, в результате чего губки 4 занимают разжатое положение.
В начале интервала движения звена 10 при рабочем или холостом ходах ролик 25, взаимодействуя с соответствующим концевым участком паза 17, перемещает ползун 13 в верхнее крайнее положение. При этом губки 4 занимают сжатое положение, которое они сохраняют при повороте ведущего звена в интервале прохождения роликом 25 участка с постоянной кривизной паза 17.
В интервале рабочего хода устройства губки 4 удерживают изделие, переносимое из одной позиции в другую. По завершении рабочего хода губки разжимаются и перестают удерживать изделие, при этом последнее выводится из устройства. Холостой ход выполняется аналогично рассмотренному, но при отсутствии изделия.
Предложенное устройство позволяет, в сравнении с прототипом, упростить конструкцию, повысить производительность и точность работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2012 |
|
RU2521934C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265510C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном в виде зубчатой рейки, исполнительного механизма с ведущим и выходными звеньями, снабженными губками для захвата изделий, и привод. Ведущее звено исполнительного механизма выполнено в виде поворотного стержня, подвижно сопряженного с выходным звеном передаточного механизма. Выходные звенья исполнительного механизма шарнирно соединены с его ведущим звеном и дополнительно кинематически с ним связаны. Дополнительная кинематическая связь выходных звеньев исполнительного механизма с ведущим звеном включает ползун, подвижно сопряженный с ведущим звеном, шатуны, каждый из которых шарнирно соединен с ползуном и соответствующим выходным звеном, и неподвижный копир с фигурным пазом для взаимодействия с упомянутым ползуном. При этом на ползуне жестко закреплен палец для шарнирной связи с шатунами и смонтирован ролик для взаимодействия с фигурным пазом неподвижного копира. Изобретение позволит упростить конструкцию, повысить точность работы и производительность устройства. 9 з.п. ф-лы, 1 ил.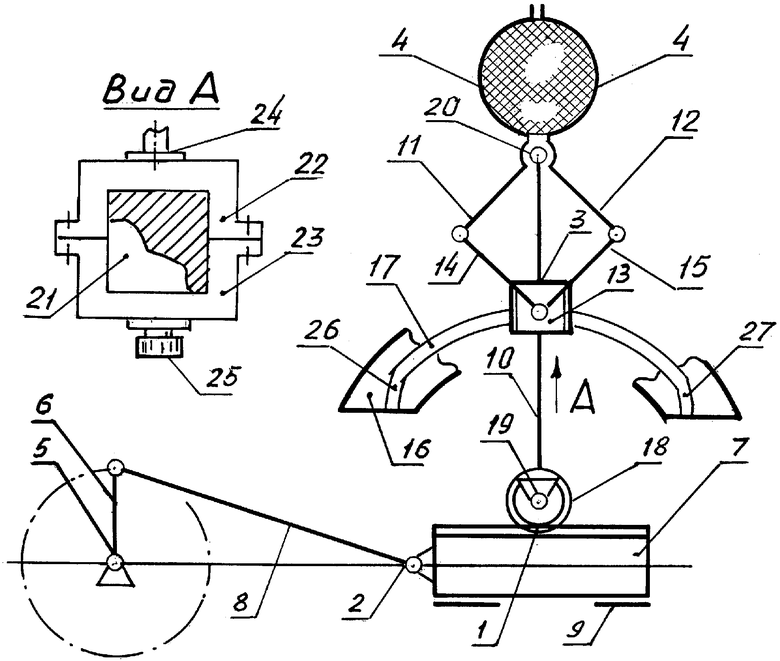
W=3·n-2p5-p4=3·3-2·4-0=1,
где W - число степеней свободы выходного звена передаточного механизма, W=1;
n - число подвижных звеньев, n=3;
р5 - число низших кинематических пар, p5=4;
р4 - число высших кинематических пар, р4=0.
при рабочем и холостом ходах соответственно
W=3·n-2р5-р4=3·4-2·5-1=1,
где W - число степеней свободы каждого из выходных звеньев, W=1;
n - число подвижных звеньев, n=4;
р5 - число низших кинематических пар, р5=5;
р4 - число высших кинематических пар, р4=1;
на границах интервалов движения соответственно
W=3·n-2р5-р4=3·7-2·9-2=1,
где W - число степеней свободы каждого из выходных звеньев относительно ведущего звена, W=1;
n - число подвижных звеньев, n=7; р5=9; р4=2.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| US 5885052 A, 23.03.1999. | |||

