Предлагаемое изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, применяемым для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Такие манипуляционные механизмы, имитируя определенные движения рук человека, обеспечивают захват изделия (объекта манипулирования), его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа "рука" для передачи изделий, выполненное в виде комбинированного механизма, содержащего исполнительный механизм с губками для захвата изделий, передаточный механизм, выполненный в виде рычажно-зубчатого механизма, и привод (патент 2177404 (РФ), опубл. в БИ, 2001. - 36 - прототип).
Основным недостатком прототипа являются невысокие точность функционирования и производительность. Упомянутые недостатки являются результатом сравнительно большого числа подвижных звеньев и кинематических пар. Зазоры в сопряжениях звеньев не способствуют обеспечению высокой точности, а увеличенное число подвижных звеньев лимитирует частоту повторения рабочих циклов и снижает производительность.
Задачей настоящего изобретения является повышение производительности и точности функционирования устройства.
Решение поставленной задачи достигается тем, что в устройстве типа "рука" для передачи изделий, содержащем комбинированный механизм, выполненный в виде передаточного механизма с ведущим, промежуточным и выходным звеньями, исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод, ведущее звено передаточного механизма выполнено в виде зубчатого колеса, выходное - в виде зубчатой рейки, при этом промежуточное звено состоит из двух блоков шестерен, в каждом из которых одна шестерня для взаимодействия с ведущим звеном, другая - с выходным.
Шестерни для взаимодействия с выходным звеном выполнены с неполным числом зубьев, при этом в каждой шестерне зубья расположены на половине дуги ее делительной окружности.
Выходное звено передаточного механизма выполнено в виде ведущего звена исполнительного механизма, с выходными звеньями которого оно шарнирно соединено.
Комбинированный механизм содержит неподвижный копир с продольными фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма.
Губки для захвата изделий жестко закреплены на выходных звеньях исполнительного механизма, при этом упомянутое закрепление губок выполнено разъемным.
Выходное звено передаточного механизма имеет в поперечном сечении прямоугольную форму, при этом в боковинах прямоугольника выполнены зубья для взаимодействия с зубьями шестерен промежуточного звена.
На свободных концах выходных звеньев исполнительного механизма смонтированы ролики для взаимодействия с продольными фигурными пазами неподвижного копира.
Каждый блок промежуточного звена передаточного механизма выполнен в виде совокупности жестко спаренных шестерен.
Шарнирное соединение выходного звена передаточного механизма с выходными звеньями исполнительного механизма содержит палец, жестко закрепленный на конце упомянутого выходного звена.
Выходное звено передаточного механизма подвижно сопряжено по меньшей мере с двумя жестко закрепленными направляющими.
Заявляемое устройство отличается от прототипа сочетанием конструктивных элементов и наличием связи между ними, обеспечивающими упрощение конструкции, повышение производительности и точности функционирования.
В предлагаемом устройстве выходное звено передаточного механизма непосредственно сопряжено с выходными звеньями исполнительного механизма. Это упрощает конструкцию, поскольку уменьшается число подвижных звеньев и кинематических пар. Кроме того, в предлагаемом устройстве нет системы гибкой связи между приводом и исполнительным механизмом. Это способствует повышению точности функционирования устройства.
Выполнение всех звеньев передаточного механизма в виде элементов зубчатых передач (зубчатое колесо, шестерни, рейка) повышает точность функционирования устройства, его технологичность при сборке и наладке, способствует простоте компоновки. Выполнение промежуточного звена передаточного механизма в виде двух блоков шестерен дает возможность преобразовывать вращение ведущего зубчатого колеса в возвратно-поступательное движение выходного звена (зубчатой рейки).
Выполнение шестерен промежуточного звена, взаимодействующих с рейкой, в виде колес с неполным числом зубьев дает возможность этим шестерням поочередно входить в зацепление с рейкой. В результате обеспечивается возвратно-поступательное движение зубчатой рейки, поскольку шестерни вращаются в одном направлении, но каждая из них входит в зацепление с зубьями только одной (правой или левой) боковины рейки.
Выполнение зубчатой рейкой двух функций, а именно: выходного звена передаточного механизма и ведущего звена исполнительного механизма, уменьшает число подвижных звеньев и кинематических пар, способствуя этим повышению точности работы устройства.
Применение неподвижного копира с продольными фигурными пазами для взаимодействия с роликами выходных звеньев исполнительного механизма уменьшает энергозатраты на движение масс звеньев. В сравнении предлагаемого устройства с прототипом неподвижный копир заменяет собой подвижный ползун, при этом оба звена выполняют одну и ту же функцию.
Жесткое соединение губок с выходными звеньями исполнительного механизма определяется тем, что губки должны имитировать движение выходных звеньев. Выполнение упомянутого соединения разъемным вызвано тем, что такое соединение обеспечивает возможность быстрой смены губок при переналадке устройства на передачу изделий другой формы.
Прямоугольная форма поперечного сечения выходного звена передаточного механизма является наиболее технологичной при нарезании зубьев на его боковинах и наиболее целесообразна для сопряжения с шестернями промежуточного звена.
Применение роликов на выходных звеньях исполнительного механизма уменьшает износ рабочих профилей фигурных пазов неподвижного копира и таким образом способствует точности функционирования губок устройства.
Блоки промежуточного звена выполнены спаренными, состоящими из двух жестко связанных шестерен. В каждом блоке одна из шестерен (с полным числом зубьев) сопряжена с ведущим звеном передаточного механизма, другая (с неполным числом зубьев) - с выходным звеном (зубчатой рейкой). Такая компоновка блоков дает возможность преобразовывать вращение ведущего зубчатого колеса в возвратно-поступательное движение ведомой зубчатой рейки.
Палец, жестко закрепленный на конце зубчатой рейки, является наиболее простым и надежным элементом шарнирной связи рейки с выходными звеньями исполнительного механизма. Жесткая связь пальца с рейкой обеспечивает высокую точность движения губок. Говоря иначе, жесткое крепление пальца на рейке предпочтительнее других способов его крепления, главным образом, из-за точности функционирования губок.
Сопряжение выходного звена передаточного механизма, по меньшей мере, с двумя неподвижными направляющими дает возможность исключить упругие деформации (прогиб) рейки.
Предлагаемое устройство типа "рука" для передачи изделий поясняется чертежами.
На фиг.1 представлена кинематическая схема устройства; на фиг.2 - вид А на фиг.1.
Устройство содержит комбинированный механизм 1, выполненный в виде передаточного механизма 2, исполнительного механизма 3 с губками 4 для передачи изделий, и привод 5.
Механизм 2 включает ведущее звено 6 в виде зубчатого колеса, жестко закрепленного на валу 7 привода 5, выходное звено 8 в виде зубчатой рейки и промежуточное звено, которое включает два блока шестерен (блоки 9 и 10). Каждый блок включает две шестерни 11 и 12, установленные соосно и жестко связанные между собой. Шестерни 11 выполнены с полным числом зубьев и сопряжены с зубчатым колесом 6. Шестерни 12 имеют неполное число зубьев для периодического сопряжения с зубчатой рейкой 8, при этом зубья выполнены на 1/2 их периметра (на 1/2 дуги делительной окружности). Угол установки шестерен 12 (угол между началами их рабочих ходов) равен 180o. При таком угле установки шестерни поочередно входят в зацепление с рейкой, обеспечивая ее возвратно-поступательное движение. Выходное звено 8 подвижно сопряжено с направляющими 13 и 14.
Механизм 3 включает ведущее звено, функцию которого выполняет звено 8 передаточного механизма, выходные звенья 15 и 16, шарнирно сопряженные посредством пальца 17 со звеном 8, и неподвижный копир 18 с продольными фигурными пазами 19 и 20 для взаимодействия с выходными звеньями 15 и 16. На концах выходных звеньев 15 и 16 закреплены губки 4 для захвата изделий, а на других концах звеньев смонтированы ролики 21 и 22 для взаимодействия с фигурными пазами неподвижного копира.
Форма губок 4 соответствует форме передаваемых изделий. При захвате и переносе изделия обеспечивается жесткое сопряжение губок с изделием по большей части периметра последнего.
Устройство типа "рука" для передачи изделий работает следующим образом.
При работе привода 5 вал 7 совершает вращательное движение, которое посредством ведущего звена 6 и шестерен 11 трансформируется во вращательное движение шестерен 12 с неполным числом зубьев. При этом зубья шестерен 12, вращающихся в одном направлении, поочередно входят в зацепление с выходным звеном (рейкой) 8, обеспечивая таким образом возвратно-поступательное движение звена 8. При работе привода 5 все звенья передаточного механизма (6, 11, 12 и 8) совершают движения с постоянной скоростью.
При движении звена 8 ролики 21 и 22 выходных звеньев 15 и 16 взаимодействуют с фигурными пазами 19 и 20 копира 18, при этом губки 4 занимают разжатое или сжатое положение соответственно текущему положению упомянутых звеньев 15 и 16. Началу рабочего хода устройства соответствует его положение, при котором выходное звено 8 механизма 2 находится в крайнем положении, соответствующем границе интервалов рабочего и холостого ходов. В этом положении комбинированного механизма 1 губки 4 разжаты и готовы для "охвата" изделия.
В интервале рабочего хода устройства губки 4 занимают сжатое положение, выполняя операцию переноса изделия в позицию выдачи, при этом губки удерживают изделие, переносимое по прямолинейной траектории. По завершении рабочего хода губки 4 разжимаются и перестают удерживать изделие, переданное из одной позиции в другую. В позиции выдачи изделия выходное звено 8 занимает другое крайнее положение, при этом губки занимают разжатое положение до начала холостого хода устройства.
В интервале кинематического (рабочего) цикла устройства губки 4 совершают сложное движение, состоящее из двух простых движений: возвратно-поступательного вместе со звеном 8 и возвратно-поворотного с выстоями относительно звена 8.
Выполнение передаточного механизма в виде совокупности зубчатых передач упрощает конструкцию устройства, повышает точность его функционирования, снижает энергозатраты на реализацию процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2012 |
|
RU2521934C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312008C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312763C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |

Изобретение относится к комбинированным механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании машин, станков, прессов и другого оборудования. Устройство содержит комбинированный механизм, выполненный в виде передаточного механизма с ведущим, промежуточным и выходным звеньями, исполнительного механизма с ведущим и выходными звеньями, последние из которых снабжены губками для захвата изделий, и привод. Ведущее звено передаточного механизма выполнено в виде зубчатого колеса, выходное - в виде зубчатой рейки, при этом промежуточное звено состоит из двух блоков шестерен, в каждом из которых одна шестерня для взаимодействия с ведущим звеном, другая - с выходным. Выходное звено передаточного механизма является ведущим звеном исполнительного механизма, с выходными звеньями которого оно шарнирно соединено. Комбинированный механизм содержит неподвижный копир с продольными фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма. На свободных концах выходных звеньев исполнительного механизма смонтированы ролики для взаимодействия с продольными фигурными пазами неподвижного копира. Изобретение позволит повысить производительность и точность функционирования устройства и упростить конструкцию устройства. 9 з.п.ф-лы, 2 ил.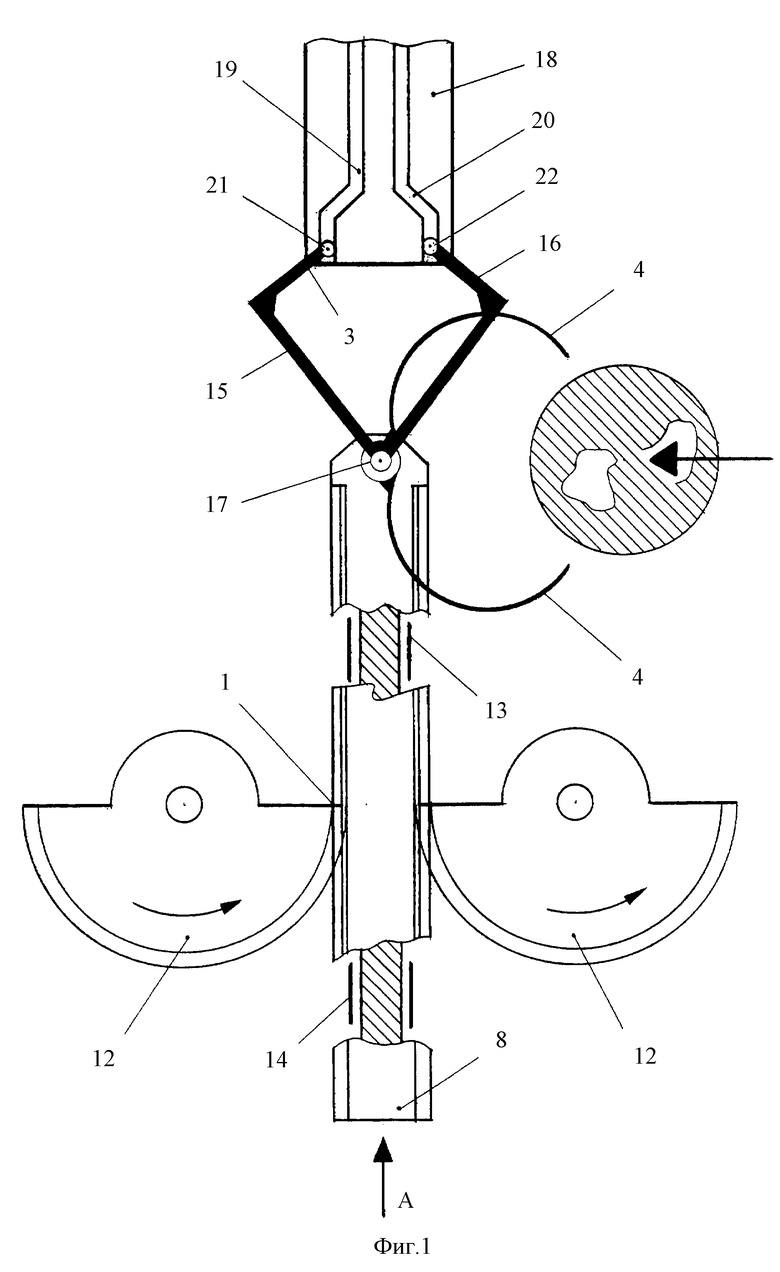
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2177404C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2172240C1 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

