Предлагаемое изобретение относится к механизмам со сложным движением выходных звеньев, которые применяются для выполнения вспомогательных операций при обслуживании работы машин, станков, прессов и устройств различного назначения. Такие манипуляционные механизмы, имитирующие определенные движения рук человека, обеспечивают захват («схват») изделия - объекта манипулирования, его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, манипуляционное устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев Л.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами в линиях высокой производительности.
Известно также устройство типа «рука» для передачи изделий, содержащее комбинированный механизм, выполненный в виде передаточного механизма с ведущим, промежуточным и выходным звеньями, последние из которых снабжены губками для захвата изделий, и привод, в котором ведущее звено передаточного механизма выполнено в виде зубчатого колеса, выходное - в виде зубчатой рейки, при этом промежуточное звено состоит из двух блоков шестерен, в каждом из которых одна шестерня для взаимодействия с ведущим звеном, другая - с ведомым звеном (патент РФ №2217297 (РФ), опубл. в БИ, 2003. - №33 - прототип).
Основным недостатком прототипа являются большое число подвижных звеньев и кинематических пар. Это снижает точность работы устройства, уменьшает производительность, увеличивает энергозатраты на процесс передачи изделий.
Задачей настоящего изобретения является упрощение структуры кинематической цепи устройства, повышение его производительности и точности работы.
Решение поставленной задачи достигается тем, что в комбинированном механизме со сложным движением выходных звеньев, содержащем передаточный механизм с ведущим звеном в виде зубчатого колеса и выходным звеном в виде зубчатой рейки, исполнительный механизм с ведущим звеном, которым является выходное звено передаточного механизма, и выходными звеньями, снабженными губками для захвата изделий, ведущее зубчатое колесо передаточного механизма выполнено с неполным числом зубьев, а выходное звено снабжено силовым упругим элементом для выполнения холостых ходов.
В ведущем зубчатом колесе передаточного механизма зубья расположены на ½ дуги его делительной окружности.
Силовой упругий элемент выполнен в виде пружины растяжения, один конец которой закреплен на конце зубчатой рейки, другой - на стойке.
Выполнение ведущего звена передаточного механизма в виде зубчатого колеса с неполным числом зубьев, периодически сопрягаемого с выходным звеном, позволяет уменьшить до минимума число подвижных звеньев и кинематических пар в составе передаточного механизма. Из схемы передаточного механизма иключены промежуточные звенья и соответствующие им кинематические пары, при этом работоспособность механизма сохраняется. Так, для рабочего хода механизма (движение с изделием в губках) получаем
W=3·n-2р5-р4=3·2-2·2-1=1,
где W - степень подвижности механизма, W=1;
n - число подвижных звеньев (зубчатое колесо и рейка), n=2;
р5 - число низших кинематических пар (зубчатое колесо-стойка и
рейка - неподвижная направляющая), р5=2;
р4 - число высших кинематических пар (сопряжение зубчатого колеса с рейкой), р4=1.
При работе прототипа промежуточные звенья, связывающие ведущее звено с выходным звеном (рейкой), работают поочередно, т.е. спаренные зубчатые колеса поочередно связывают ведущее колесо с рейкой. При этом, однако, пара, не участвующая в сопряжении с рейкой, также совершает движение, аналогичное работающей паре. Это увеличивает число движущихся масс и приводит к неоправданным энергозатратам. В предлагаемом изобретении этот недостаток исключен.
Силовой упругий элемент обеспечивает обратный (холостой) ход выходного звена при отсутствии взаимодействия зубьев ведущего колеса с рейкой и при отсутствии изделия в губках исполнительного механизма. Как следует, холостой ход комбинированного механизма выполняется при отсутствии внешней технологической нагрузки, т.е. при минимальном силовом нагружении. Этим предопределяется возможностью использования силового упругого элемента для осуществления холостых ходов в предлагаемом комбинированном механизме.
Расположение зубьев только на половине делительной окружности ведущего зубчатого колеса обеспечивает взаимодействие последнего с выходным звеном лишь в интервале рабочего хода, т.е. в период переноса изделия из позиции «схват изделия» в позицию «выдача изделия». При обратном (холостом) ходе ведущее зубчатое колесо не взаимодействует с рейкой.
Силовой упругий элемент, выполненный в виде пружины растяжения, предпочтительнее элемента в виде пружины сжатия при креплении (соединении) его концов на зубатой рейке и на стойке. Концы пружины выполнены прямолинейными и снабжены резьбой. Такое выполнение пружины является наиболее простым, конструктивно выполнимым и надежным решением.
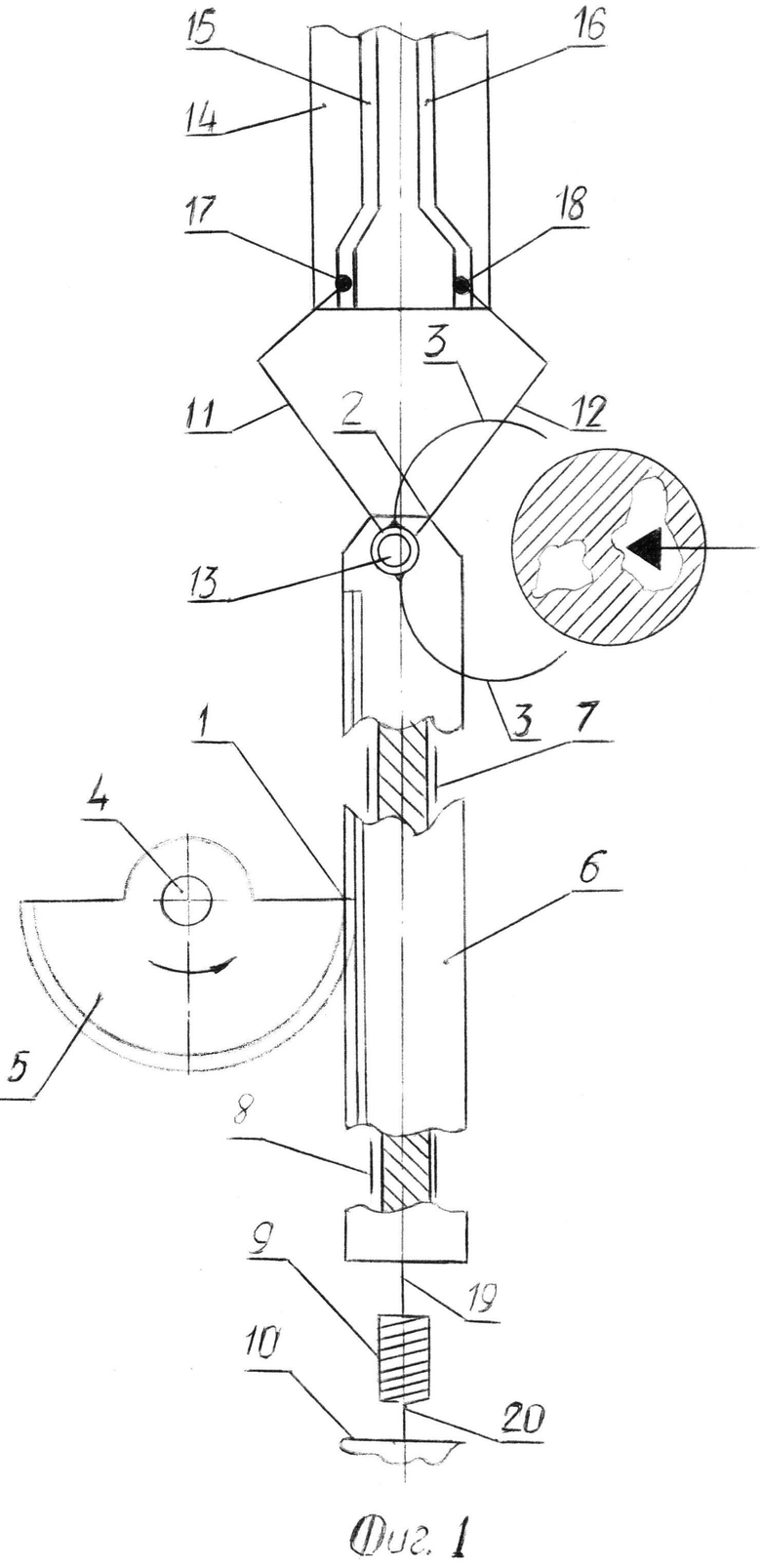
Предлагаемый комбинированный механизм со сложным движением выходных звеньев поясняется чертежом, на фиг.1 представлена кинематическая схема механизма.
Комбинированный механизм содержит передаточный механизм 1, исполнительный механизм 2 с губками 3 для захвата изделий и привод 4.
Передаточный механизм 1 выполнен в виде зубчатого механизма, ведущее зубчатое колесо 5 которого связано с валом привода 4, выходное звено выполнено в виде зубчатой рейки 6, смонтированной в неподвижных прямолинейных направляющих 7 и 8. Колесо 5 имеет неполное число зубьев для периодического сопряжения с зубчатой рейкой 6, при этом зубья выполнены на ½ их периметра (на половине дуги делительной окружности). Выходное звено 6 подвижно сопряжено с направляющими 7 и 8 и снабжено силовым упругим элементом 9, выполненным в виде пружины растяжения, один конец которой закреплен на торце звена 6, другой - на стойке 10.
Механизм 2 включает ведущее звено, функцию которого выполняет звено 6 передаточного механизма, выходные звенья 11 и 12, шарнирно сопряженные посредством пальца 13 со звеном 6, и неподвижный копир 14 с продольными фигурными пазами 15 и 16 для взаимодействия с выходными звеньями 11 и 12. На концах выходных звеньев 11 и 12 закреплены губки 3 для захвата изделий, а на других концах звеньев смонтированы ролики 17 и 18 для взаимодействия с фигурными пазами неподвижного копира.
Форма губок 3 соответствует форме передаваемых изделий. При захвате и переносе изделий обеспечивается жесткое сопряжение губок с изделием по большей части периметра последнего. Губки закреплены на выходных звеньях жестко, но разъемно.
Концы пружины 9 выполнены прямолинейными и снабжены резьбой для ее сопряжения с рейкой 6 и стойкой 10. Резьбовые концы 19 и 20 пружины выполнены одинаковыми по длине, диаметру и шагу.
Комбинированный механизм со сложным движением выходных звеньев работает следующим образом.
При работе привода 4 выходной вал последнего совершает вращательное движение, обеспечивая вращение ведущего зубчатого колеса 5 с постоянной угловой скоростью. При рабочем ходе, т.е. в интервале сопряжения зубьев колеса 5 с зубьями рейки 6, последняя совершает поступательное движение, генерируя работу исполнительного механизма 2 и обеспечивая растяжение пружины 9. При этом пружина 9 аккумулирует (накапливает) энергию для последующего ее сжатия и выполнения рейкой 6 холостого хода (без изделия в губках 3 и без сопряжения колеса 5 с рейкой 6).
При движении рейки 6 ролики 17 и 18 выходных звеньев 11 и 12 взаимодействуют с фигурными пазами 15 и 16 копира 14, при этом губки 3 занимают разжатое или сжатое положение соответственно текущему положению упомянутых звеньев 11 и 12. Началу рабочего хода комбинированного механизма соответствует его положение, при котором рейка 6 механизма 1 находится в крайнем положении, соответствующем границе интервалов рабочего и холостого ходов. В этом положении комбинированного механизма пружина 9 занимает сжатое положение, губки 3 разжаты и готовы для «схвата» изделия.
В интервале рабочего хода комбинированного механизма губки 3 занимают сжатое положение, выполняя операцию переноса изделия в позицию выдачи, при этом губки удерживают изделие, переносимое по прямолинейной траектории. До завершения рабочего хода губки 3 разжимаются и перестают удерживать изделие, переданное из одной позиции в другую.
В позиции выдачи изделия рейка 6 занимает текущие положения, при которых губки оказываются разжатыми до начала холостого хода. В крайнем положении рейки 6 ведущее зубчатое колесо 5 выходит из сопряжения с рейкой, при этом последняя совершает холостой ход, генерируемый силовым упругим элементом 9.
В интервале кинематического (рабочего) цикла комбинированного механизма губки 3 совершают сложное движение, состоящее из двух простых движений: возвратно-поступательного вместе с рейкой 6 и возвратно-поворотного с выстоями относительно рейки 6.
Выполнение ведущего звена передаточного механизма в виде зубчатого колеса с неполным числом зубьев и применение силового упругого элемента для выполнения холостых ходов упрощает конструкцию комбинированного механизма, повышает точность его функционирования и производительность, снижает энергозатраты на осуществление процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217297C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2247021C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265509C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438857C2 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2012 |
|
RU2521933C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
Изобретение относится к механизмам со сложным движением выходных звеньев, применяемым при обслуживании работы технологических машин, станков, прессов и т.д. Комбинированный механизм содержит передаточный механизм с ведущим звеном в виде зубчатого колеса и выходным звеном в виде зубчатой рейки, исполнительный механизм с ведущим звеном, которым является выходное звено передаточного механизма, выходными звеньями, снабженными губками для захвата изделий, и неподвижным копиром с продольными фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма. При этом ведущее зубчатое колесо передаточного механизма выполнено с неполным числом зубьев, а выходное звено передаточного механизма снабжено силовым упругим элементом для выполнения холостых ходов. Изобретение обеспечивает упрощение конструкции механизма, повышение точности функционирования и производительности, снижает энергозатраты на осуществление процесса передачи изделий. 2 з.п. ф-лы, 1 ил.
1. Комбинированный механизм со сложным движением выходных звеньев, содержащий передаточный механизм с ведущим звеном в виде зубчатого колеса и выходным звеном в виде зубчатой рейки, исполнительный механизм с ведущим звеном, которым является выходное звено передаточного механизма, выходными звеньями, снабженными губками для захвата изделий, и неподвижным копиром с продольными фигурными пазами для взаимодействия с выходными звеньями исполнительного механизма, отличающийся тем, что ведущее зубчатое колесо передаточного механизма выполнено с неполным числом зубьев, а выходное звено передаточного механизма снабжено силовым упругим элементом для выполнения холостых ходов.
2. Комбинированный механизм по п.1, отличающийся тем, что в ведущем зубчатом колесе передаточного механизма зубья расположены на ½ дуги его делительной окружности.
3. Комбинированный механизм по п.1, отличающийся тем, что силовой упругий элемент выполнен в виде пружины растяжения, один конец которой закреплен на конце зубчатой рейки, другой - на стойке.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217297C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2010 |
|
RU2438856C2 |
| US 5885052 A, 23.03.1999 | |||
| Способ производства твердого сычужного сыра | 2018 |
|
RU2716400C2 |

