Изобретение относится к области бортового приборостроения и автоматики, может быть использовано для решения задач ориентации и управления подвижными объектами.
При управлении подвижными объектами (ПО) в околоземном пространстве (наземными и подземными, плавающими и подводными, летательными и баллистическими, внутритрубными и космическими) наряду с задачей навигации необходимо решать задачу пространственной ориентации. При этом к системам ориентации ПО предъявляют наряду с требованиями высокой точности требования по обеспечению высокой надежности работы в эксплуатации, а также требование обеспечения отказоустойчивости с целью реализации условия работоспособности систем ориентации в резервно-аварийных режимах (РАР).
Анализ существующих способов решения задач бесплатформенной ориентации ПО в околоземном пространстве показывает, что большинство существующих способов ориентировано на достижение в первую очередь высоких показателей точности определения параметров ориентации и почти не предполагает обеспечение условий отказоустойчивости и работоспособности систем в РАР [1-3].
Известен бесплатформенный способ инерциальной ориентации ПО, заключающийся в определении параметров ориентации объектов путем интегрирования по времени сигналов трехосных блоков гироскопов (ТБГ) с учетом предварительно определенных параметров начальной ориентации ПО в предстартовых условиях [1, 2]. Способ является автономным, помехоустойчивым, высоконадежным. Недостатки способа:
- низкая точность решения задачи ориентации из-за проявления дрейфа сигналов гироскопов,
- ограничение времени активной работы системы инерциальной ориентации и необходимость выполнения операций коррекции системы,
отсутствие свойства отказоустойчивости системы инерциальной ориентации и невозможность ее работы в РАР при отказах гироскопов в трехосных блоках. Таким образом, способ инерциальной ориентации ПО при трехосных схемах построения блоков гироскопов не обеспечивает свойство аварийноспособности системе ориентации.
Известен способ автономной бесплатформенной ориентации ПО по геофизическим полям (ГФП), который свободен от основного недостатка способа инерциальной ориентации [3]. Этот способ основан на вычислении параметров ориентации ПО по показаниями трехосных блоков акселерометров (ТБА) и магнитометров (ТБМ). Сущность способа заключается в том, что на основе показаний ТБА вычисляют параметры, характеризующие отклонения ПО от плоскости горизонта (углы крена (γ) и тангажа ϑ по показаниям ТБМ вычисляют угол магнитного курса ϕ.
Способ ориентации ПО по ГФП получил название способа аналитического горизонт-компасирования (АГК). Причем вычислительные операции аналитического компасирования (АК) проводят с учетом результатов предварительно выполненных операций аналитического горизонтирования (АГ). В этом проявляется свойство связанности операций АГ и АК в способе АГК. При этом погрешности, характеризующие неточность выполнения операций АГ (Δγ; Δϑ) оказывают существенное влияние на точность определения магнитного курса ϕ на этапе АК.
Связанность каналов АГ и АК в способе АГК приводит к тому, что при любом отказе в канале АГ канал АК также становится неработоспособным. Этот факт усугубляет недостаток способа АГК, связанный с отсутствием у него свойства адаптации к отказам.
К основному недостатку способа АГК относят то, что способ может быть реализован только в режиме остановок ПО (режим ZUPT) [3]. В режиме движения ПО проявляются динамические погрешности инерциального канала из-за возмущаемости ТБА со стороны ускорений  движения ПО.
движения ПО.
При трехосной схеме построения блоков (ТБА, ТБМ) способ АГК не обеспечивает условия адаптации к отказам бесплатформенной системы ориентации (БСО).
Известен способ аналитической пространственной ориентации (АПО) ПО в околоземном пространстве, который свободен от недостатка способа АГК, обусловленного связанностью каналов горизонтирования и компасирования [4].
Сущность способа АПО заключается в том, что на основе двухвекторной магнито-инерциальной информации о векторах кажущегося ускорения  ПО и напряженности
ПО и напряженности  результирующего магнитного поля, получаемой с помощью ТБА и ТБМ, соответственно, одновременно (непоэтапно) вычисляют параметры ориентации ПО в условиях функциональной избыточности информации. Следовательно, в способе АПО каналы АГ и АК не обособлены друг от друга, а объединены в один общий канал-канал АПО. К недостаткам способа АПО следует отнести следующее:
результирующего магнитного поля, получаемой с помощью ТБА и ТБМ, соответственно, одновременно (непоэтапно) вычисляют параметры ориентации ПО в условиях функциональной избыточности информации. Следовательно, в способе АПО каналы АГ и АК не обособлены друг от друга, а объединены в один общий канал-канал АПО. К недостаткам способа АПО следует отнести следующее:
- работоспособность системы АПО обеспечивается только в режимах остановок ПО или на маломаневренных объектах (как и для способа АГК),
- на аппаратном уровне не обеспечиваются условия для реализации свойства отказоустойчивости системы АПО в РАР,
- повышенная сложность алгоритмов обработки информации предъявляет повышенные требования к вычислительным характеристикам вычислителя (длине разрядной сетки, быстродействию, информационной производительности).
Таким образом, способ АПО устраняет многие недостатки способов-аналогов бесплатформенной ориентации ПО, но не устраняет основной общий недостаток - отсутствие свойства отказоустойчивости системы ориентации.
Свойство функциональной отказоустойчивости (инструментальной (аппаратной) и информационной) может быть реализовано в условиях обеспечения структурно или функционально избыточной информации [5, 6].
Известен способ бесплатформенной ориентации и навигации ПО, основанный на обработке многомерной информации, получаемой с помощью блоков векторных датчиков с неортогонально установленными осями чувствительности [7, с. 253]; [8, с. 216]. Неортогональная установка векторных датчиков в блоке позволяет реализовать условия для структурной (за счет резервирования) и функциональной избыточности информации, что в свою очередь способствует повышению показателей точности, надежности системы, а также придания им свойства аппаратной (инструментальной) отказоустойчивости и работоспособности в РАР.
К недостаткам способа бесплатформенной автономной ориентации ПО на основе использования информации от блоков с неортогонально установленными векторными датчиками (акселерометрами, магнитометрами) следует отнести отсутствие свойства функциональной избыточности информации на этапе обработки полученной первичной приборной информации (ППИ)
Известен способ бесплатформенной ориентации ПО, основанный на комплексной обработке магнито-инерциально-спутниковой информации, получаемой от блоков автономной информации (ТБА, ТБМ) и спутниковой навигационной системы (СНС) [9]. Этот способ наиболее близок к предлагаемому изобретению и поэтому принят за прототип.
Сущность способа заключается в том, что на основе показаний автономных блоков формируют информацию о векторах кажущегося ускорения ПО  и напряженности магнитного поля
и напряженности магнитного поля  в осях базиса m, связанного с ПО, а на основе показаний СНС вычисляют проекции этих же векторов
в осях базиса m, связанного с ПО, а на основе показаний СНС вычисляют проекции этих же векторов  на оси географического базиса q=NHE.
на оси географического базиса q=NHE.
Затем на основе магнито-инерциальной информации о векторах  составляют матричное уравнение, решение которого дает информацию о матрице ориентации А базиса m относительно базиса q.
составляют матричное уравнение, решение которого дает информацию о матрице ориентации А базиса m относительно базиса q.
К недостаткам этого способа ориентации ПО следует отнести следующее:
- невысокая точность решения задачи ориентации из-за возмущаемости магнитометрического канала, обусловленной влиянием магнитного поля самого ПО, не учитываемого в способе обработки информации,
- низкие показатели надежности системы ориентации, реализующей этот способ, т.к. отказ любого датчика приводит к неработоспособному состоянию всю систему,
- отсутствие свойства отказоустойчивости и работоспособности системы ориентации в РАР из-за отсутствия аппаратной и функциональной избыточности информации.
Для устранения указанных недостатков необходимо усовершенствовать магнитометрический канал и создать условия для аппаратной и функциональной избыточности информации по всем каналам от процесса измерений до вычислений.
Задача настоящего изобретения заключается в устранении недостатков способа ориентации, основанного на обработке магнито-инерциально-спутниковой информации.
Поставленная задача решается за счет совершенствования магнитометрического канала в направлении учета технологических дестабилизирующих факторов, связанных с влиянием магнитного поля объекта (МПО), погрешностей сборки и монтажа блоков, а также за счет реализации условий для обеспечения структурной и функциональной избыточности информации, достигаемых путем использования неортогональной схемы установки в блоках векторных датчиков и разработки многовариантных алгоритмов обработки комбинированной информации.
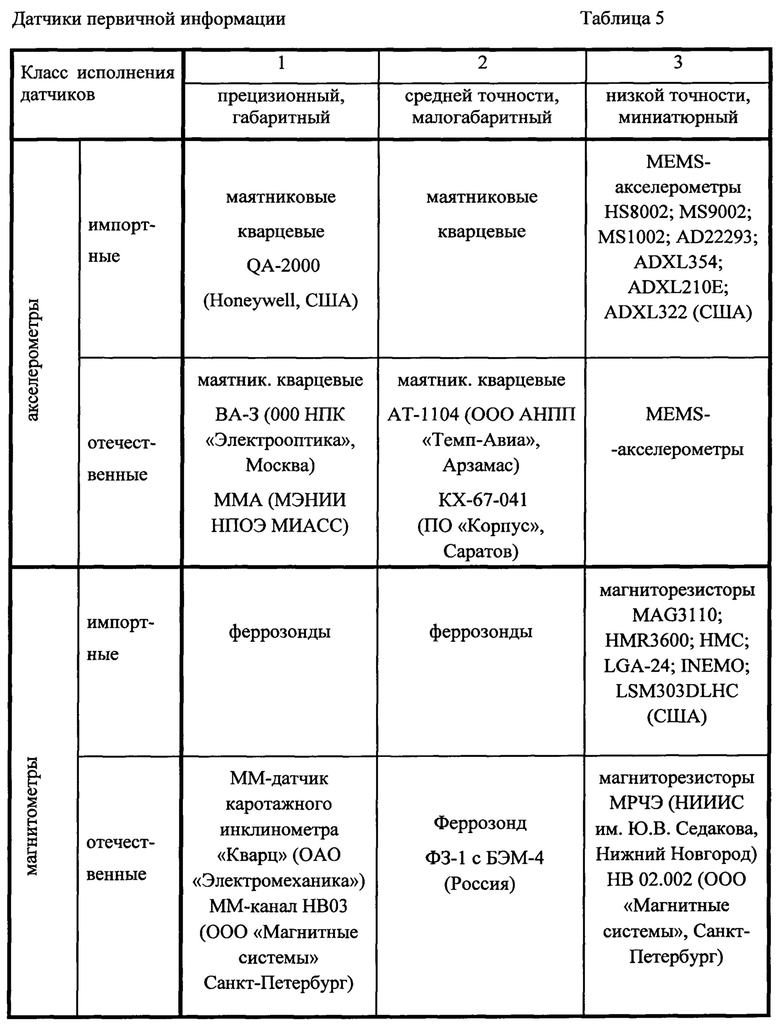
Предлагаемое изобретение поясняется чертежами (Фиг. 1, 2). На Фиг. 1 представлена схема установки векторных датчиков первичной информации (ДЛИ) в неортогональных блоках: блоке акселерометров (НБА) и блоке магнитометров (НБМ). На Фиг. 1 приняты следующие обозначения:
XYZ- система координат (базис m), связанная с ПО,
 - оси чувствительности одномерных ДПИ,
- оси чувствительности одномерных ДПИ,
Xt; βt - углы ориентации осей чувствительности ДПИ относительно продольной оси ОХ связанного базиса m,
- углы ориентации осей чувствительности ДПИ относительно продольной оси ОХ связанного базиса m,
v - число ДПИ в блоке (НБА или НБМ).
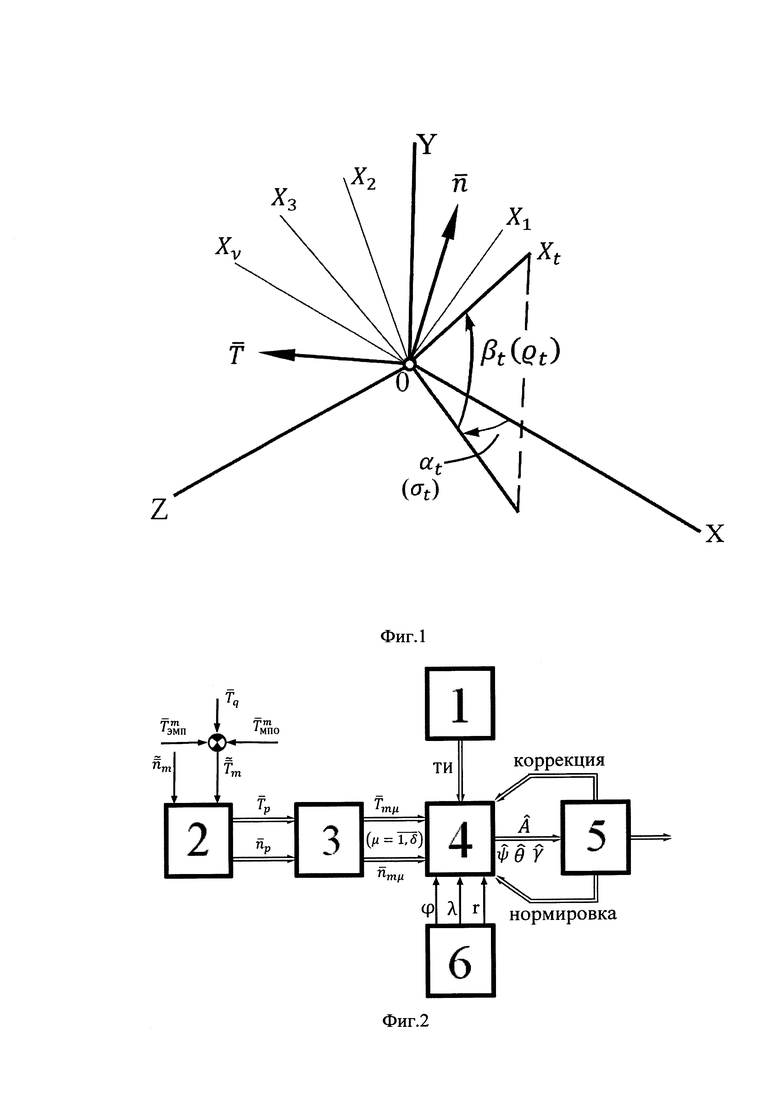
На Фиг. 2 представлена функциональная схема способа магнито-инерциальной неортогональной ориентации расширенной (МИНОР). На Фиг. 2 приняты следующие обозначения:
1 - позиция, соответствующая выполнению операций метрологической тарировки, аналитической юстировки и технологической калибровки ДПИ и блоков (НБА, НБМ),
2 - позиция, соответствующая процессу измерений с помощью НБА и НБМ проекций вектора кажущегося ускорения  и вектора напряженности
и вектора напряженности  результирующего магнитного поля на оси чувствительностей датчиков, а также формированию многомерных векторов
результирующего магнитного поля на оси чувствительностей датчиков, а также формированию многомерных векторов  в приборных базисах
в приборных базисах 
3 - позиция, соответствующая процессу обработки первичной приборной информации (ППИ) и формирования многовариантных скорректированных векторов  и
и  приведенных к осям связанного с объектом базиса m=XYZ,
приведенных к осям связанного с объектом базиса m=XYZ,
4 - позиция, соответствующая процессу обработки магнито-инерциально-спутниковой информации по алгоритмам МИНОР,
5 - позиция, соответствующая процессу автономного контроля и нормировки (АКН) по алгоритмам контроля автономного, самотестирования, коррекции и аналитической диагностики (КАСКАД).
6 - спутниковая навигационная система (СНС), формирующая навигационную информацию о географической широте ϕ, долготе λ, высоте h и модуле радиуса-вектора 
Тонкими линиями на схеме (Фиг. 2) обозначены потоки информации об одних векторах  или информации о скалярных величинах (ϕ,λ,r). Двойными линиями обозначены потоки многомерной и многовекторной информации.
или информации о скалярных величинах (ϕ,λ,r). Двойными линиями обозначены потоки многомерной и многовекторной информации.
Способ МИНОР заключается в последовательном выполнении операций технологических калибровок, измерений, формирования ППИ и ее комбинированной обработки (Фиг. 1, 2):
1. Заранее (до старта ПО) выполняют операции метрологических тарировок, аналитических юстировок и технологических калибровок магнитометрического и инерциального каналов измерений (поз. 1 на Фиг. 2). Технологические операции выполняют по методике, описанной в научно-технической литературе [10].
Обработку полученной информации выполняют по алгоритмам технологического обеспечения модуля (АТОМ). На выходе блока (поз. 1 на Фиг. 2) формируют технологическую информацию (ТИ) об индивидуальных параметрах ДПИ, НБА, НБМ и модуля.
2. В процессе измерений вектора кажущегося ускорения  с помощью НБА и вектора напряженности результирующего магнитного поля
с помощью НБА и вектора напряженности результирующего магнитного поля  с помощью НБМ формируют многомерные (v-мерные) векторы
с помощью НБМ формируют многомерные (v-мерные) векторы  и
и  в виде проекций
в виде проекций  и
и  векторов
векторов  (Фиг. 1) на оси чувствительностей акселерометров и магнитометров (поз. 2, Фиг. 2).
(Фиг. 1) на оси чувствительностей акселерометров и магнитометров (поз. 2, Фиг. 2).
где  - векторы кажущегося ускорения
- векторы кажущегося ускорения  ПО и напряженности магнитного поля Земли (МПЗ), отнесенные к географическому базису q=NHE,
ПО и напряженности магнитного поля Земли (МПЗ), отнесенные к географическому базису q=NHE,
 - векторы
- векторы  отнесенные к базису m=XYZ, связанному с ПО,
отнесенные к базису m=XYZ, связанному с ПО,
 - многомерные приборные векторы (v х 1), компонентами которых являются показания блоков НБА и НБМ,
- многомерные приборные векторы (v х 1), компонентами которых являются показания блоков НБА и НБМ,
 - абсолютное ускорение ПО и ускорение свободно падающего тела, отнесенные к связанному базису m=XYZ,
- абсолютное ускорение ПО и ускорение свободно падающего тела, отнесенные к связанному базису m=XYZ,
 - векторы напряженностей магнитных полей ПО (МПО) и электромагнитных помех (ЭМП) в связанном базисе m,
- векторы напряженностей магнитных полей ПО (МПО) и электромагнитных помех (ЭМП) в связанном базисе m,
А - матрица ориентации ПО,.
S - матрица коэффициентов Пуассона,
Е - единичная матрица (3×3),
В, D - прямоугольные матрицы (v × 3), характеризующие ориентацию осей  приборного базиса
приборного базиса  относительно осей связанного базиса m,
относительно осей связанного базиса m,
Причем:

Путем использования неортогональных схем измерений в НБА и НБМ обеспечивают выполнение требований инструментального (аппаратного) расширения ППИ за счет условия функционально избыточной информации о векторах 
Параметры векторов  и матриц S, В, D находят при выполнении операций технологических калибровок (поз. 1, Фиг. 2)
и матриц S, В, D находят при выполнении операций технологических калибровок (поз. 1, Фиг. 2)
Из выражений (1) и (2) видно, что в показаниях НБМ и НБА содержится комплексная информация: геофизическая (ГФИ), приборная, технологическая, эксплуатационная, (в том числе и информация о матрице ориентации А ПО).
3. На основе результатов формирования многомерной ППИ  выполняют операцию декомпозиции векторов
выполняют операцию декомпозиции векторов  (поз. 3 на Фиг. 2). При этом формируют совокупность 8 пар оценок трехкомпонентных векторов
(поз. 3 на Фиг. 2). При этом формируют совокупность 8 пар оценок трехкомпонентных векторов  приведенных к осям связанного базиса m = XYZ:
приведенных к осям связанного базиса m = XYZ:
где Ti; Tj; Tk - показания тройки выбранных магнитометров (i-ого, j-ого, k-ого), входящих в состав НБМ,
ni; nj; nk - показания тройки выбранных акселерометров (i-ого, j-ого, k-ого), входящих в состав НБА,
 - союзные матрицы (3×3), присоединенные к матрицам и Bμ и Dμ,
- союзные матрицы (3×3), присоединенные к матрицам и Bμ и Dμ,
 - обратные матрицы (33) для ц-ого варианта
- обратные матрицы (33) для ц-ого варианта 
detBμ; detDμ - детерминанты матриц и Bμ и Dμ 
Причем:
Алгоритмы (8)-(10) позволяют получить устойчивые, невырождаемые решения, если матрицы Bμ и Dμ  являются неособенными:
являются неособенными:
Известно, что условия (11) выполняются, если строки или столбцы этих матриц линейно независимы, что практически реализовать достаточно просто, т.к. углы неортогональной установки ДПИ в блоках aτ; βτ; στ;  не повторяются.
не повторяются.
Для получения развернутых конечных алгоритмов обработки информации вместо формул (8)-(10) могут быть использованы соответствующие формулы Крамера.
С учетом результатов выполненных ранее операций технологической подготовки (поз. 1 на Фиг. 2) проводят операцию коррекции оценок векторов  в условиях функциональной избыточности информации:
в условиях функциональной избыточности информации:
После коррекции векторы  оказываются свободными от влияния дестабилизирующих факторов со стороны МПО, ЭМП и технологических погрешностей монтажа модуля на ПО (М).
оказываются свободными от влияния дестабилизирующих факторов со стороны МПО, ЭМП и технологических погрешностей монтажа модуля на ПО (М).
В блоке (поз. 3 на Фиг. 2) одновременно выполняют операцию идентификации отказов ДПИ и определение отказавшего векторного датчика. Эту операцию выполняют на основе сравнения и оценок компонент векторов  с использованием таблиц идентификации [6, с. 110].
с использованием таблиц идентификации [6, с. 110].
Число 6 вариантов построения измерительно-вычислительных трехконтурных каналов (магнитометрических и акселерометрических) зависит от числа v векторных ДЛИ, входящих в состав неортогональных блоков НБМ, НБА:

Для  значения числа 6 вариантов представлены в табл. 1.
значения числа 6 вариантов представлены в табл. 1.
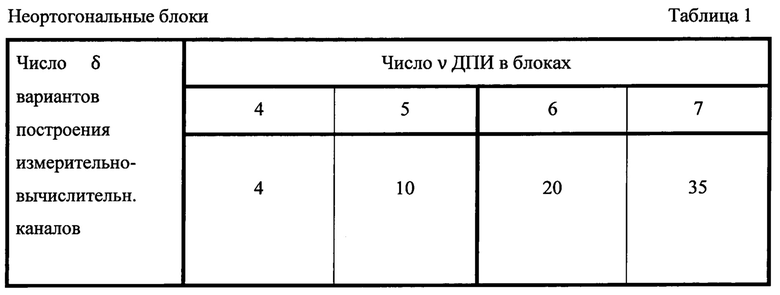
С технологической, схемо-технической, экономической и эксплуатационной точек зрения наиболее целесообразным и эффективным является вариант v=5 (для которого δ=10), т.к. обычно реализуют на практике число каналов δ, не превышающее десяти (δ≤10).
За счет получения функционально избыточной магнито-инерциальной информации с помощью 6 измерительно-вычислительных каналов  обеспечивают условия адаптации БСО к отказам, свойства ее отказоустойчивости и работоспособности системы ориентации МИНОР в резервно-аварийных режимах (РАР) на аппаратном (инструментальном) уровне. При v=5 (табл. 1) допускаются отказы до четырех ДПИ (2 магнитометра + 2 акселерометра).
обеспечивают условия адаптации БСО к отказам, свойства ее отказоустойчивости и работоспособности системы ориентации МИНОР в резервно-аварийных режимах (РАР) на аппаратном (инструментальном) уровне. При v=5 (табл. 1) допускаются отказы до четырех ДПИ (2 магнитометра + 2 акселерометра).
После идентификации отказа программным путем отключают отказавшие ДПИ от потока информации в соответствующий u-ый измерительно-вычислительный канал  При этом одновременно программным путем производят в блоке (поз. 3 на Фиг. 2) операцию реконфигурации алгоритмов формирования измерительно-вычислительных каналов обработки комбинированной магнито-инерциальной информации.
При этом одновременно программным путем производят в блоке (поз. 3 на Фиг. 2) операцию реконфигурации алгоритмов формирования измерительно-вычислительных каналов обработки комбинированной магнито-инерциальной информации.
Работоспособность БСО после реконфигурации аппаратной измерительной части системы и соответствующих алгоритмов обработки информации сохраняется на прежнем уровне [5, 6].
4. Выполняют основные операции обработки МИС-информации в блоке (поз. 4 на Фиг. 2) по алгоритмам МИНОР.
С учетом технологической информации (ТИ) и навигационной информации (ϕ, λ, r), получаемых от блоков 1 и 6 (поз. 1 и 6 на Фиг. 2), вычисляют компоненты векторов  и
и  в географическом базисе q=NHE [11]:
в географическом базисе q=NHE [11]:
Геомагнитный потенциал U:

Модуль радиуса-вектора  относительно поверхности референц-эллипсоида с большой полуосью а равен:
относительно поверхности референц-эллипсоида с большой полуосью а равен:

Компоненты вектора  находят на основе основного уравнения гравиметрии [12]:
находят на основе основного уравнения гравиметрии [12]:
Приводят выражение (15) к скалярному виду:
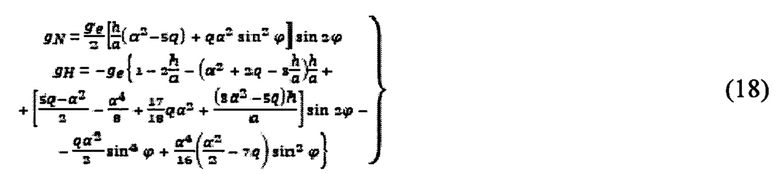
 Причем:
Причем:

В формулах (14)-(20) приняты следующие обозначения:
gradU;  - градиент геомагнитного потенциала,
- градиент геомагнитного потенциала,
ϕ, λ; r, h - географические координаты точки наблюдения (широта ϕ, долгота λ, радиус r и высота h),
 - векторы абсолютного, относительного и кориолисова ускорений в географическом базисе q,
- векторы абсолютного, относительного и кориолисова ускорений в географическом базисе q,
 - коэффициенты Гаусса-Шмидта, [11],
- коэффициенты Гаусса-Шмидта, [11],
 - присоединенный полином Лежандра степени n порядка m,
- присоединенный полином Лежандра степени n порядка m,
α - эксцентриситет фигуры Земли,
q - отношение центростремительного ускорения на экваторе к ускорению свободно падающего тела на экваторе gв

gв=9,7803267715 м/с2;
Ω=7,292116557 * 10-5 с-1,
R - средний радиус Земли, R=6378211 м,
rϕ; rλ - радиусы кривизны меридиана и параллели фигуры Земли в точке наблюдения,
а=6378245 м;
b=6356863 м;

h = r - R
 - северная, вертикальная, восточная составляющие скорости движения ПО относительно Земли и соответствующие производные по времени.
- северная, вертикальная, восточная составляющие скорости движения ПО относительно Земли и соответствующие производные по времени.
Численные значения скорости  и производных получают на основе обработки навигационной информации от СНС (ϕ, λ, r).
и производных получают на основе обработки навигационной информации от СНС (ϕ, λ, r).
На основе информации о векторах  геофизическая информация (ГФИ) может быть расширена за счет вычисления на основе способа восстановления векторной информации [13] компонент вектора
геофизическая информация (ГФИ) может быть расширена за счет вычисления на основе способа восстановления векторной информации [13] компонент вектора  в связанном базисе m=XYZ.
в связанном базисе m=XYZ.
Дальнейшее расширение векторной информации может быть достигнуто путем вычисления дополнительных векторов в связанным m=XYZ и географическом q=NHE базисах [4]:
На основе вычисленных основных  и дополнительных
и дополнительных  векторов составляют матричное уравнение АПО в условиях функциональной избыточности информации [4]:
векторов составляют матричное уравнение АПО в условиях функциональной избыточности информации [4]:
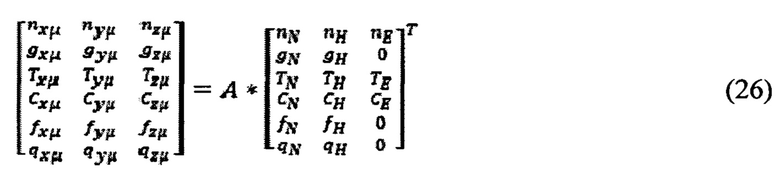
Или в компактной форме:

На основе принципа декомпозиции разбивают матричное уравнение (26) на частные матричные уравнения идентификации с квадратными матрицами вида:

где Pk - приборная матрица (3×3) для k-ого варианта,
Nk - матрица идентификации (3×3) для k-ого варианта
Причем матрицы Pk и Nk (3×3) формируют на основе набора любых трех строк матрицы Р (6×3) и соответствующих столбцов матрицы N (3×6).

Максимально возможное число (kmax) вариантов построения матричных уравнений идентификации (28) составляет:

При δ=10 (для v=5, табл.1) получаем:

Для практических целей достаточно использовать не более 10 вариантов построения уравнений идентификаций 
Алгоритмы АПО получают путем обращения матричных уравнений идентификации (28) [4]:

где: Pk - матрица приборной информации, (3×3),
 - оценка матрицы ориентации ПО, (3×3),
- оценка матрицы ориентации ПО, (3×3),
 - союзная матрица (3×3),
- союзная матрица (3×3),
detNk - детерминат матрицы Nk (3×3).
Матрицу ориентации ПО А определяют с помощью направляющих косинусов aij  углов между ортами связанного m
углов между ортами связанного m  и географического q
и географического q  базисов:
базисов:

Проверяют условие невырожденности матрицы идентификации Nk:

Например, для варианта матрицы идентификации:

условие (34) конкретизируем:
Используют операцию вычисления средней оценки матрицы ориентации ПО 

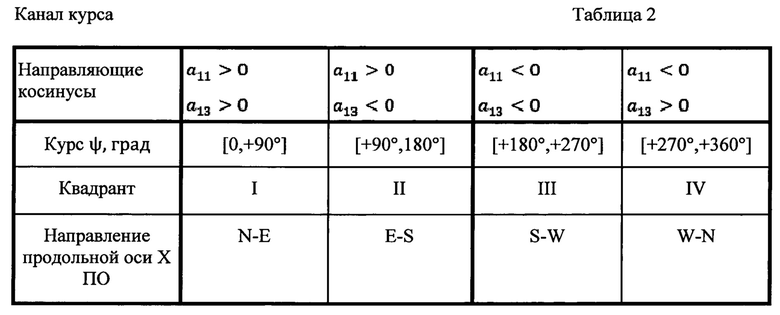
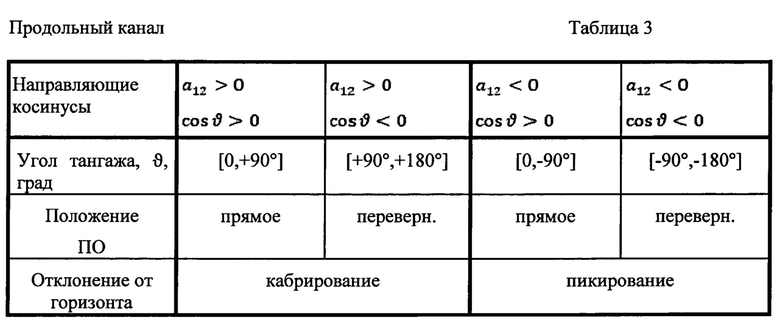
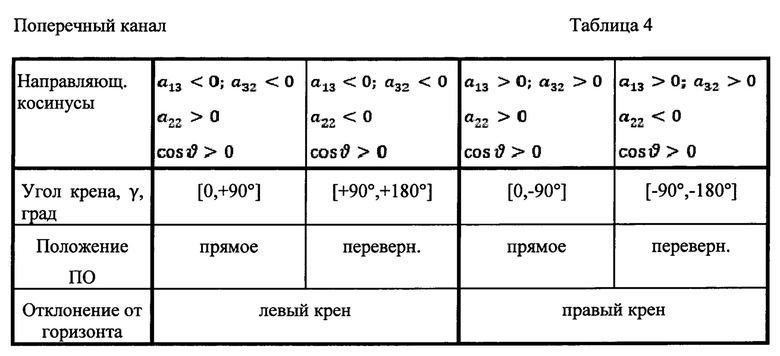
Вычисляют оценки эйлеровых углов по формулам [4]:
Знаки оценок эйлеровых углов  определяют с помощью табл. 2-4.
определяют с помощью табл. 2-4.
Алгоритмы вычисления оценок эйлеровых углов могут быть получены на основе использования формул Крамера [4].
5. Выполняют контрольные и нормирующие операции по комплексным алгоритмам самотестирования и комбинированной автономной диагностики (КАСКАД) (поз. 5 на Фиг. 2):
Аналогичным образом выполняют контрольные операции над дополнительными векторами (23)-(25).
Проверку правильности вычисления оценок параметров ориентации ПО выполняют по следующим алгоритмам [4]:

По итогам проверок выполняют операции коррекции и нормировки промежуточных и конечных результатов вычислений (Фиг. 2).
Практическая реализация предлагаемого способа бесплатформенной ориентации ПО в околоземном пространстве может быть выполнена на основе использования импортной или отечественной элементной базы (табл. 5, 6).
Численный анализ показывает, что для выполнения вычислений оценок эйлеровых углов  с допустимыми погрешностями, не превышающими 1II, необходимо обеспечить
с допустимыми погрешностями, не превышающими 1II, необходимо обеспечить
- измерения компонент вектора  с помощью НБМ с точностью до 2 знака после запятой
с помощью НБМ с точностью до 2 знака после запятой 
- измерения компонент вектора  с помощью НБА с точностью до 4…5 знака после запятой (Δnдоп=5 ⋅ 10-5g);
с помощью НБА с точностью до 4…5 знака после запятой (Δnдоп=5 ⋅ 10-5g);
- вычисления эйлеровых углов и их тригонометрических функций до 6…7 знака после запятой.
Такие требования к точности измерений и вычислений обеспечивают при длине разрядной сетки в вычислителе в 24 бит. Указанные в табл. 6 вычислители позволяют оперировать с числами с длиной разрядной сетки 32 бит.
Частота обновления информации БСО, реализующей способ МИНОР, определяется маневренными свойствами ПО и допустимыми погрешностями вычисления углов.
Например, по самому динамичному каналу ориентации ПО (каналу крена у) для шаговой частоты обновления информации имеем:

Циклическая частота обновления информации в навигационном канале СНС составляет vц=1…5 Гц. Следовательно, выполняется необходимое условие согласования частот обновления информации в каналах ориентации (vm) и навигации (vц):

Для маломаневренных ПО шаговая частота vm может быть снижена до величины vm =100 Гц.

Тактовую частоту vT выполнения вычислительных операций обеспечивают исходя из условия:

Для вычислителей, указанных в табл. 6, тактовая частота  МГц.
МГц.
Конструктивное исполнение БСО на основе реализации способа МИНОР может быть выполнено в виде моноблока, поблочной схемы или комбинированной схемы. Режимы работы БСО МИНОР:
- режим технологической подготовки,
- штатный режим,
- режим самоконтроля и автономной самодиагностики,
- резервно-аварийные режимы (режимы адаптации к отказам).
Благодаря реализации такого набора режимов работы БСО обеспечивают условия как для повышения показателей точности и надежности системы, так и для придания ей нового свойства - живучести в эксплуатации.
Источники информации
1. Ориентация и навигация подвижных объектов. Современные информационные технологии / Под общ. ред. Б.С. Алешина, К.К. Веремешко, А.И. Черноморского. - М.: Физматлит, 2006. - 424 с.
2. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем. - СПб.: ГНЦ РФ ОАО «Концерн ЦНИИ «Электроприбор», 2009. - 280 с.
3. Белянин Л.Н. Скважинная гироскопическая система ориентации трехкомпонентного сейсмического зонда / Гироскопия и навигация, №1, 2003, - с. 19-30.
4. Патент RU №2653967 С1 МПК G01 21/00. Способ автономной ориентации подвижных объектов / авторы: Проскуряков Г.М. и др: патентообладатель -ФГБОУ ВО Сарат. госуд. техн. ун-т им. Гагарина Ю.А., от 20.06.2017, опубл. 15.05.2018, Бюлл.№14.
5. Епифанов А.Д. Надежность систем управления: Справочная библиотека инженера-конструктора.- М.: Машиностроение, 1975. - 180 с.
6. Епифанов А.Д. Избыточные системы управления летательными аппаратами. - М.: Машиностроение, 1978. - 144 с.
7. Блок измерителей линейных ускорений с прецизионными кварцевыми акселерометрами в качестве чувствительных элементов / IX Санкт-Петербургская МНК по интегрированным навигационным системам.- СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2002. - с. 216-220.
8. Калихман Д.М., Калихман Л.Я., Полушкин А.В. и др. Измеритель вектора кажущегося линейного ускорения - прибор БИЛУ КХ69-042 для системы управления спускаемого аппарата корабля «Союз-ТМА» // XIII Санкт-Петербургская международная конференция по интегрированным навигационным системам. - СПб.: Изд-во ЦНИИ «Электроприбор», 2006 - с. 253-263.
9. Корюкин М.С. Построение алгоритмов функционирования интегрированной с СНС безгироскопной системы ориентации летательного аппарата / Материалы VII конференции молодых ученых «Навигация и управление движением». - СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2006. - С. 282-287.
10. Игнатьев А.А., Проскуряков Г.М. Гетеромагнитометрия: алгоритмы, методики, калибровки блоков магнитометров. - Саратов: Изд-во Сарат. ун-та, 2014. - 152 с.
11. International Geomagnetic Reference Field IGRF WMM-20, URL: http//www.ngdc.noaa.gov.com (дата обращения: 20.01.22).
12. Руководство по Всемирной геодезической системе - 1984 (WGS-84).-Международная организация гражданской авиации IKAO, изд. 2ое, 2002, DOC9674.
13. Патент RU №2757828.С1 МПК: G05D 1/00, G05B 23/00; G06F 11/00. Способ восстановления векторной информации в измерительно-информационных системах / авторы: Проскуряков Г.М. и др, патентообладатель: ФГБОУ ВО Сарат.госуд. техн. ун-т им. Гагарина Ю.А., от 15.12.2020, опубл. 21.10.2021, Бюлл. №30.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| АВТОНОМНЫЙ КОМПЛЕКС ДЛЯ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ СИСТЕМ ПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ И НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2826826C2 |
| Способ восстановления векторной информации в информационно-измерительных системах | 2020 |
|
RU2757828C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| СПОСОБ АВТОНОМНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2017 |
|
RU2653967C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| КОМПЛЕКТ ЛАБОРАТОРНОГО ОБОРУДОВАНИЯ ДЛЯ ИЗУЧЕНИЯ ИЗБЫТОЧНОГО БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2024 |
|
RU2817519C1 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИОННОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2092402C1 |
Заявленное изобретение относится к способу бесплатформенной ориентации подвижных объектов. Для ориентации подвижных объектов формируют первичную приборную информацию о векторе кажущегося ускорения объекта по сигналам предварительно откалиброванного неортогонального блока акселерометров, векторе напряженности результирующего магнитного поля по сигналам предварительно откалиброванного неортогонального блока магнитометров, радиусе-векторе точки местоположения объекта по сигналам спутниковой навигационной системы, а также на последующей обработке этой комплексной магнито-инерциально-спутниковой информации с целью определения параметров ориентации объекта определенным образом выполняют автономный контроль, самодиагностику, коррекцию и нормировку полученных результатов. Обеспечивается повышение отказоустойчивости системы ориентации. 2 ил., 6 табл.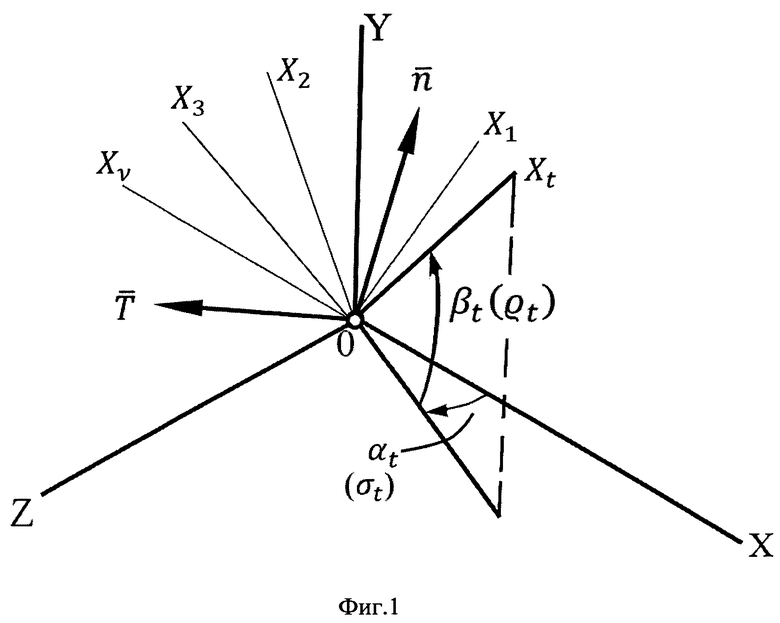
Способ бесплатформенной ориентации подвижных объектов, основанный на формировании первичной приборной информации о векторе кажущегося ускорения п объекта по сигналам предварительно откалиброванного неортогонального блока акселерометров, векторе напряженности результирующего магнитного поля  по сигналам предварительно откалиброванного неортогонального блока магнитометров, радиусе-векторе
по сигналам предварительно откалиброванного неортогонального блока магнитометров, радиусе-векторе  точки местоположения объекта по сигналам спутниковой навигационной системы, а также на последующей обработке этой комплексной магнито-инерциально-спутниковой информации с целью определения параметров ориентации объекта, отличающийся тем, что сначала формируют расширенную двухвекторную многомерную информацию
точки местоположения объекта по сигналам спутниковой навигационной системы, а также на последующей обработке этой комплексной магнито-инерциально-спутниковой информации с целью определения параметров ориентации объекта, отличающийся тем, что сначала формируют расширенную двухвекторную многомерную информацию  на основе показаний предварительно откалиброванных неортогональных блоков v акселерометров (v≥4) и v магнитометров (v≥4) в неортогональных многоосных приборных базисах р=Xk
на основе показаний предварительно откалиброванных неортогональных блоков v акселерометров (v≥4) и v магнитометров (v≥4) в неортогональных многоосных приборных базисах р=Xk  затем производят операцию декомпозиции полученной многомерной двухвекторной первичной приборной информации
затем производят операцию декомпозиции полученной многомерной двухвекторной первичной приборной информации  путем формирования δ совокупностей
путем формирования δ совокупностей  оценок трехкоординатных векторов
оценок трехкоординатных векторов 
 полученных на основе выборки показаний троек акселерометров и троек магнитометров, с последующим приведением их к осям связанного базиса m=XYZ, далее с учетом результатов предварительно выполненных операций технологических калибровок корректируют сформированные совокупности оценок векторов
полученных на основе выборки показаний троек акселерометров и троек магнитометров, с последующим приведением их к осям связанного базиса m=XYZ, далее с учетом результатов предварительно выполненных операций технологических калибровок корректируют сформированные совокупности оценок векторов  и вычисляют δ пар скорректированных векторов
и вычисляют δ пар скорректированных векторов  в связанном базисе m=XYZ, затем на основе использования навигационной информации от спутниковой навигационной системы вычисляют векторы
в связанном базисе m=XYZ, затем на основе использования навигационной информации от спутниковой навигационной системы вычисляют векторы  и их векторное произведение в географическом базисе q=NHE и, наконец, по вычисленным скорректированным и приведенным к базисам m и q векторам определяют оценки матриц ориентации объекта и оценки эйлеровых углов в условиях функционально избыточной информации, а также выполняют автономный контроль, самодиагностику, коррекцию и нормировку полученных результатов.
и их векторное произведение в географическом базисе q=NHE и, наконец, по вычисленным скорректированным и приведенным к базисам m и q векторам определяют оценки матриц ориентации объекта и оценки эйлеровых углов в условиях функционально избыточной информации, а также выполняют автономный контроль, самодиагностику, коррекцию и нормировку полученных результатов.
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| CN 105928519 B, 29.03.2019 | |||
| EP 3087348 B1, 13.03.2019. | |||

