Изобретение относится к радиолокации, в частности к области автоматического обнаружения радиолокационных целей, и может быть использовано в аппаратуре первичной обработки радиолокационной информации (АПОИ), являющейся оконечной частью радиолокационной станции (РЛС).
Известно устройство обнаружения пакетов радиолокационных целей, описанное в [1], стр.80, рис.1.9, содержащее блок запоминания амплитуд сигналов, блок весовых коэффициентов, сумматор и пороговое устройство.
Устройство работает следующим образом.
Видеосигналы, приходящие с выхода РЛС, запоминаются в блоке запоминания амплитуд сигналов, суммируются с весовыми коэффициентами. Полученная сумма поступает на пороговое устройство. Когда полученная сумма превысит порог, выдается сигнал обнаружения цели.
Недостатком этого устройства является большая сложность реализации, особенно в части запоминания амплитуд сигналов.
В работе [1] в главе 3, посвященной первичной обработке квантованных радиолокационных сигналов, на стр.156 излагается процесс квазиоптимального обнаружения пачки двоично-квантованных сигналов, а на стр.157, рис.3.1, приводится структурная схема решающего устройства для обнаружения пачки двоично-квантованных сигналов.
По поводу этой схемы на стр.157, 2-ой абзац сверху, говорится «...Характерной особенностью решающего устройства обнаружения квантованных сигналов является наличие фактически двух порогов. Первый порог устанавливается в квантизаторе и является входным порогом (порогом обнаружения отдельных импульсов пачки). Второй порог устанавливается на выходе схемы и является порогом обнаружения пачки...».
В работе [1] в главе 2 на стр.115 на рис.2.5 приведено «Изображение зоны обзора РЛС после временного и двоичного амплитудного квантования сигналов».
Устройство обнаружения двоично-квантованных пакетов радиолокационных целей на приведенной структурной схеме содержит квантизатор, регистр со сдвигом (РгС), аналоговый весовой сумматор и аналоговый компаратор (Пороговое устройство).
По поводу этой структурной схемы в [1] (стр.156, последний абзац) говорится «Структурная схема решающего устройства обнаружения, реализующего алгоритм (3.7), изображена на рис.3.1. На схеме, для простоты, запоминающее устройство квантованных сигналов представлено в виде регистра со сдвигом РгС. Весовая функция условно запрограммирована на сопротивлениях. Накопитель «взвешенных» единиц в этом случае представляет собой сумматор токов или напряжений. Однако все указанные элементы схемы легко могут быть реализованы средствами дискретной вычислительной техники...».
Для того чтобы согласно приведенной цитате реализовать эту схему в цифровом виде необходимо
- регистр со сдвигом (РгС) заменить на оперативное запоминающее устройство (ОЗУ),
- весовую функцию, запрограммированную на сопротивлениях, и накопитель «взвешенных» единиц, представляющий собой сумматоры токов или напряжений, заменить на «весовой» цифровой сумматор.
Необходимо привести следующие уточнения.
1. По поводу ОЗУ.
Регистр со сдвигом РгС рассчитан на запоминание двоично-квантованного радиолокационного пакета, находящегося в каком-либо одном элементе дальности радиолокационного пространства, и представлен в [1] на рис.3.1 для демонстрации принципа работы.
Для того чтобы охватить все элементы дальности радиолокационного пространства в реальной аппаратуре, применяют оперативное запоминающее устройство, работающее по принципу регистра со сдвигом.
Работа ОЗУ происходит следующим образом.
Двоичная информация поступает на вход 1-го разряда ОЗУ и записывается в выбранный в данный момент адрес ОЗУ, соответствующий определенному элементу пространства. При этом информация всех разрядов в данном адресе передвигается на один разряд, т.е. информация («0» или «1»), находившаяся в 1-ом разряде, передвигается во второй разряд, освобождая первый разряд для «свежей» информации, полученной в этом элементе пространства. Информация, находившаяся во 2-ом разряде, передвигается в 3-ий разряд и т.д. Информация последнего разряда отбрасывается.
Затем происходит обращение к следующему адресу ОЗУ, соответствующему следующему элементу пространства, и в нем происходит такой же сдвиг информации и в первый разряд этого адреса записывается «свежая» информация, полученная в этом элементе пространтства.
ОЗУ, работающее таким образом, называется ОЗУ «движущееся окно».
Именно такое ОЗУ применяется в устройстве обнаружения радиолокационных целей.
2. По поводу квантизатора.
В качестве синонима термина «квантизатор» в технической литературе применяется и термин «квантователь», который мы в дальнейшем и будем применять.
Функциональная схема устройства квантования видеосигналов известна. Например, [1], стр.148...151, Рис.2.18.
Известен также квантователь, названный «Амплитудно-временной квантователь с регулируемым порогом» по патенту [2] и его усовершенствование согласно патенту [3].
В квантизаторе, представленном в [1], стр.157, рис.3.1, одним из его входов является порог квантования x0.
Однако в «Амплитудно-временном квантователе с регулируемым порогом» установка порога квантования производится не непосредственно, а опосредовано через установку вероятности превышения шумом порога квантования Рш (количество превышений в единицу времени). Это делается по следующей причине. Если установить определенный порог квантования x0, как это делается в схеме, приведенной в [1], стр.157, рис 3.1, то при возможных изменениях мощности шума приемника РЛС (из-за температурных изменений и других причин) количество превышений шумом определенного порога квантования х0 будет изменяться. Чтобы избежать этой зависимости, применяется следящая система, которая позволяет стабилизировать заданное значение числа превышений в единицу времени, изменяя соответствующим образом порог квантования. На увеличение мощности шума следящая система отвечает увеличением порога квантования, на уменьшение - уменьшением порога. Причем, т.к. число превышений порога квантования в единицу времени является случайной величиной, то решение об изменении порога производится лишь в том случае, когда число превышений отличается от заданного числа на некоторую допусковую величину.
Т.о., исходя из требований к работе современного квантователя на его вход следует подавать не значение порога квантования, а значение вероятности превышения шумом порога квантования.
С учетом приведенных уточнений прототип представлен на фиг.1. Устройство содержит квантователь 1, первый вход которого соединен с шиной видеосигнала, ОЗУ «движущееся окно» 2, вход первого разряда которого соединен с выходом квантователя 1, «весовой» цифровой сумматор 3, входы которого соединены с выходами ОЗУ «движущееся окно» 2, цифровой компаратор 4, первый m-разрядный вход которого соединен с m-разрядным выходом «весового» цифрового сумматора 3, а выход является выходом устройства, блок 5 тумблеров кода значения вероятности Рш превышения шумом порога квантования, выходы которых соединены с входами кода значения вероятности Рш превышения шумом порога квантования квантователя 1, блок 6 тумблеров кода значения порога обнаружения Λ, выходы которых соединены со вторым m-разрядным входом цифрового компаратора 4, первые входы всех тумблеров соединены с шиной "логическая 1", вторые входы всех тумблеров соединены с шиной "логический 0".
Работа прототипа происходит следующим образом.
В каждом зондировании с выхода приемника РЛС (на фиг.1 приемник РЛС не представлен) на вход видеосигнала квантователя 1 поступают видеосигналы, представляющие собой смесь шумов и полезных сигналов (сигналов от радиолокационных целей). Видеосигналы сравниваются в квантователе с порогом квантования, который устанавливается в квантователе в соответствии с поступившим кодом значения вероятности превышения шумом порога квантования Рш. Этот код поступает с выхода тумблеров блока 5 тумблеров кода значения вероятности Рш превышения шумом порога квнтования.
С выхода квантователя 1 последовательность "0" и "1" с временным тактом, соответствующим темпу перебора адресов ОЗУ «движущееся окно» 2, поступает на вход 1-го разряда ОЗУ «движущееся окно» 2 и записывается в соответствующий адрес.
Двоичная информация с выходов ОЗУ «движущееся окно» 2 поступает на входы «весового» цифрового сумматора 3.
С выхода «весового» цифрового сумматора 3 m-разрядный двоичный код поступает на первый m-разрядный вход цифрового компаратора 4.
В каждом такте полученная «весовая» сумма в виде m-разрядного двоичного кода сравнивается в цифровом компараторе 4 с порогом обнаружения Λ, поступившим на второй m-разрядный вход цифрового компаратора 4 с блока 6 тумблеров кода значения порога обнаружения Λ.
В том случае, когда значение «весовой» суммы превысит значение порога обнаружения Λ, на выходе компаратора 4 появится сигнал обнаружения радиолокационной цели: «цель есть». Этот сигнал и является выходным продуктом устройства.
Недостаток прототипа заключается в неоптимальности, т.е. в недостаточной вероятности обнаружения радиолокационных целей при полученной вероятности Рлт ложной тревоги по шумам приемника РЛС.
Это утверждение основывается на следующем.
В РЛС, оснащенных АПОИ, одна из задач обслуживающего персонала заключается в установлении кода значения вероятности превышения шумом Рш порога квантования и порога обнаружения Λ в зависимости от складывающейся радиолокационной обстановки.
Однако в прототипе отсутствует связь между кодом значения вероятности превышения шумом Рш порога квантования и порогом обнаружения Λ, а также связь с другими параметрами, такими как, например, число импульсов N в р/л пакете, вероятность Рлт ложной тревоги по шумам приемника РЛС и минимальное значение отношения сигнал/шум, при котором надо обеспечить задаваемое значение Рлт.
Поэтому код значения вероятности Рш превышения шумом порога квантования, соответствующий порогу квантования х0, и код значения порога обнаружения Λ устанавливаются практически «на глазок».
Естественно, что при установленных «на глазок» порогах практически невозможно получить оптимальные характеристики устройства, т.е. получить максимальную вероятность обнаружения радиолокационных целей для заданного минимального отношения сигнал/шум при заданной вероятности ложных тревог по шумам приемника РЛС.
Задача предлагаемого устройства состоит в повышении вероятности обнаружения радиолокационных целей.
Решение задачи достигается тем, что устанавливается оптимальная пара порогов: порог квантования хо (точнее, как уже говорилось, устанавливается вероятность превышения шумом Рш порога квантования) и порог обнаружения Λ для выбранных входных параметрах, какими являются минимальное отношение сигнал/шум и вероятность Рлт ложной тревоги по шумам приемника РЛС при заданном числе импульсов N в р/л пакете, что и обеспечивает максимальную вероятность обнаружения. Для конкретной РЛС число импульсов N в радиолокационном пакете обычно постоянно, а такие параметры, как задаваемое минимальное отношение сигнал/шум и задаваемое значение вероятности Рлт ложной тревоги по шумам приемника РЛС, могут во время работы РЛС варьироваться.
Решение задачи достигается следующим образом.
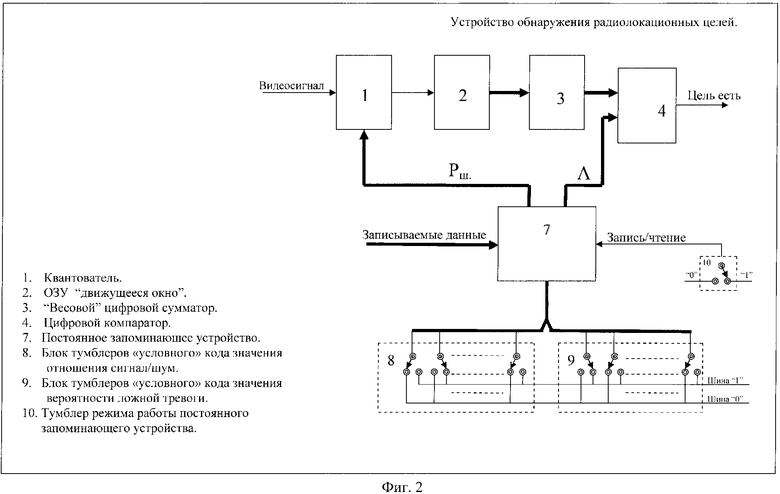
В устройство (фиг.2), содержащее квантователь 1, вход которого соединен с шиной видеосигнала, ОЗУ «движущееся окно» 2, вход первого разряда которого соединен с выходом квантователя 1, «весовой» цифровой сумматор 3, входы которого соединены с выходами ОЗУ «движущееся окно» 2, цифровой компаратор 4 двух m-разрядных цифровых кодов, первый m-разрядный вход которого соединен с выходом «весового» цифрового сумматора 3, а выход является выходом устройства, введены постоянное запоминающее устройство (ПЗУ) 7, каждый адрес которого определяется двоичными «условными кодами» задаваемых параметров, такими как минимальное значение отношения сигнал/шум и вероятность ложной тревоги по шумам приемника РЛС, а записанная заранее информация по этим адресам представляет собою оптимальную пару параметров обнаружения, а именно значение вероятности превышения шумом порога квантования, хранящееся в информационных разрядах с первого по d, и значение порога обнаружения, хранящееся в информационных разрядах с d+1 no d+m, соответствующие задаваемым параметрам, блок 8 тумблеров двоичного «условного кода» значения отношения сигнал/шум, блок 9 тумблеров двоичного «условного кода» значения вероятности ложной тревоги по шумам приемника РЛС, тумблер 10 режима работы ПЗУ, первые входы всех тумблеров соединены с шиной «логическая 1», вторые входы всех тумблеров соединены с шиной «логический 0», одна часть разрядов адресного кода ПЗУ 7 соединена с выходами тумблеров блока 8 тумблеров двоичного «условного кода» значения отношения сигнал/шум, а другая часть разрядов адресного кода ПЗУ 7 соединена с выходами тумблеров блока 9 тумблеров двоичного «условного кода» значения вероятности ложной тревоги по шумам приемника РЛС, выходные информационные разряды с первого по d ПЗУ 7 соединены с входами кода значения вероятности превышения шумом порога квантования квантователя 1, а выходные информационные разряды с d+1 no d+m ПЗУ 7 соединены со вторым m-разрядным входом цифрового компаратора 4, d+m входных информационных разрядов ПЗУ 7 соединены с входной шиной записываемых данных, вход «запись/чтение» которого соединен с выходом тумблера 10 режима работы ПЗУ.
Работа устройства происходит следующим образом.
До начала эксплуатации устройства обнаружения радиолокационных целей в ПЗУ 7 в режиме «запись» по входу «записываемые данные» в каждый адрес ПЗУ записывается значение вероятности Рш превышения шумом порога квантования и значение порога обнаружения Λ.
Адрес, в который записывается информация, определяется двоичным «условным кодом» минимального значения отношения сигнал/шум, который устанавливается на блоке тумблеров 8, и двоичным «условным кодом» вероятности Рлт ложной тревоги по шумам приемника РЛС, который устанавливается на блоке тумблеров 9.
В разряды с первого по d ПЗУ 7 записывается двоичный код значения вероятности Рш превышения шумом порога квантования.
В разряды с d+1 по m ПЗУ 7 записывается двоичный код значения порога обнаружения Λ.
Записываемая пара кодов является оптимальной для выбранных значений минимального отношения сигнал/шум, значения вероятности Рлт ложной тревоги по шумам приемника РЛС и числа импульсов N в радиолокационном пакете.
Оптимальность этих значений, заранее записываемых в ПЗУ 7, основывается на использовании авторами алгоритма расчета оптимальных значений вероятности Рш превышения шумом порога квантования и порога обнаружения Λ для выбранных параметров: отношение сигнал/шум, вероятность ложной тревоги по шумам приемника и число импульсов N в радиолокационном пакете, полученных в работах [4] и [5].
При эксплуатации устройства обнаружения радиолокационных целей ПЗУ 7 устанавливается в режим «чтение» с помощью тумблера 10 режима работы ПЗУ.
Зададимся, например, восемью различными значениями отношения сигнал/шум: 3,0; 3,25; 3,5; 3,75; 4,0; 4,25; 4,5; 4,75.
Сопоставим каждому из этих значений соответствующий двоичный «условный код» значения отношения сигнал/шум.
Зададимся, например, шестью различными значениями вероятности Рлт ложной тревоги по шумам приемника: 10-7; 5*10-7; 10-6; 5*10-6; 10-5; 5*10-5.
Сопоставим с каждым из этих значений соответствующий двоичный «условный код» значения вероятностей ложной тревоги.
Число адресов, которое имеет ПЗУ 7, должно быть не меньше произведения числа задаваемых значений отношений сигнал/шум на число задаваемых значений вероятностей Рлт ложной тревоги. В приведенном конкретном примере число используемых адресов ПЗУ 7 равно 8*6=48.
На блоке 8 тумблеров двоичного «условного кода» отношения сигнал/шум набирается двоичный «условный код» выбранного значения отношения сигнал/шум.
На блоке 9 тумблеров двоичного «условного кода» значения вероятности Рлт ложной тревоги по шумам приемника РЛС набирается двоичный «условный код» выбранного значения Рлт ложной тревоги.
Выбранные значения двоичных «условных кодов» определяют адрес, по которому происходит обращание к ПЗУ 7.
На выходе ПЗУ 7 появляется информация, хранящаяся в выбранном адресе.
На входы кода значения вероятности превышения шумом порога квантования Рш квантователя 1 поступает информация, содержащаяся в информационных выходных разрядах с первого по d ПЗУ 7.
На второй m-разрядный вход цифрового компаратора 4 поступает информация, содержащаяся в информационных выходных разрядах с d+1 по m ПЗУ 7.
В квантователе 1 устанавливается порог квантования, который будет отслеживать изменение мощности шума таким образом, чтобы вероятность Рш, превышения шумом порога квантования оставалась равной заданной.
С выхода квантователя 1 последовательность "0" и "1" с временным тактом, соответствующим темпу перебора адресов ОЗУ «движущееся окно» 2, поступает на вход 1-го разряда ОЗУ «движущееся окно» 2 и записывается в соответствующий адрес.
Двоичная информация с выходов ОЗУ «движущееся окно» 2 поступает на входы «весового» цифрового сумматора 3.
С выхода «весового» цифрового сумматора 3 m-разрядный двоичный код поступает на первый m-разрядный вход цифрового компаратора 4.
В каждом такте полученная «весовая» сумма в виде m-разрядного двоичного кода сравнивается в цифровом компараторе 4 с порогом обнаружения Λ, поступившим на второй m-разрядный вход цифрового компаратора 4. В том случае, когда значение «весовой» суммы превысит значение порога обнаружения Λ, на выходе компаратора 4 появится сигнал обнаружения р/л цели: «цель есть».
Этот сигнал и является выходным продуктом устройства.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием новых блоков: ПЗУ с записанной в него информацией, блок тумблеров двоичного «условного кода» значения отношения сигнал/шум, блок тумблеров двоичного «условного кода» значения вероятности Рлт ложной тревоги по шумам приемника РЛС, тумблер режима работы ПЗУ.
Таким образом, заявляемое устройство соответствует критерию «новизна».
Сравнение заявляемого решения с другими техническими решениями показывает, что введенный ПЗУ, блок тумблеров двоичного «условного кода» значения отношения сигнал/шум, блок тумблеров двоичного «условного кода» значения вероятности Рлт ложной тревоги по шумам приемника РЛС и тумблер режима работы ПЗУ известны.
Однако предлагаемое решение при введении ПЗУ с записанной в него информацией, блока тумблеров двоичного «условного кода» значения отношения сигнал/шум, блока тумблеров двоичного «условного кода» значения вероятности Рлт ложной тревоги по шумам приемника РЛС и тумблера режима работы ПЗУ приобретает новое качество, позволяющее установить оптимальную пару порогов: порога квантования (опосредовано через вероятность превышения порога шумом) и порога обнаружения, что обеспечивает максимальную вероятность обнаружения цели для заданных входных параметров.
Из этого можно сделать вывод о соответствии технического решения критерию «изобретательский уровень».
Источники информации
1. С.З.Кузьмин Цифровая обработка радиолокационной информации. «Советское радио», Москва - 1967.
2. Патент РФ № 1068851, МКИ G01S 7/30 «Амплитудно-временной квантователь с регулируемым порогом». Авторы: Беляковский И.Б., Кашницкий Л.М., Сонин К.Я.
3. Патент РФ № 1669281, МКИ G01S 7/292 «Амплитудно-временной квантователь с регулируемым порогом».
4. К.Я.Сонин «Точность определения угловой координаты цели при использовании обзорной импульсной РЛС». Журнал «Вопросы радиоэлектроники». Научно-технический сборник. Серия общетехническая (ОТ). Выпуск 26. 1968 г.
5. Л.М.Кашницкий «Подкласс задач теории статистических решений и его применение к задачам радиолокационного обнаружения». Журнал «Зарубежная радиоэлектроника. Успехи современной радиоэлектроники», 2001 г., № 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СЖАТИЯ ИМПУЛЬСНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 1995 |
|
RU2079858C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| ПРИЕМНИК ИМПУЛЬСНОГО СИГНАЛА | 2012 |
|
RU2528081C2 |
| УСТРОЙСТВО ДЛЯ СЕЛЕКЦИИ ИМПУЛЬСНЫХ СИГНАЛОВ | 1980 |
|
SU1840990A1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ | 1979 |
|
SU1840922A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПО КРИТЕРИЮ ОТНОШЕНИЯ ПРАВДОПОДОБИЯ ПАЧЕЧНОГО СИГНАЛА С ОГИБАЮЩЕЙ ИЗВЕСТНОЙ ФОРМЫ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269142C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2039365C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
Изобретение относится к радиолокации, в частности к области автоматического обнаружения радиолокационных целей. Устройство обнаружения радиолокационных целей относится к области автоматического обнаружения двоично-квантованных радиолокационных целей и может быть использовано в аппаратуре первичной обработки радиолокационной информации. Достигаемый технический результат - повышение вероятности обнаружения радиолокационных целей. Заявленное устройство содержит квантователь, оперативное запоминающее устройство (ОЗУ) «движущееся окно», «весовой» цифровой сумматор, цифровой компаратор, постоянное запоминающее устройство (ПЗУ) с набором тумблеров, состояние которых определяют адрес обращения к ПЗУ. Перечисленные средства соединены определенным образом между собой. Предварительно в ПЗУ по адресам, определяемым двоичными «условными кодами» задаваемых параметров, записываются оптимальное значение вероятности превышения шумом порога квантования и оптимальное значение порога обнаружения. Затем из ПЗУ считывается информация из того адреса, который определяется кодами, выбранными на блоках тумблеров двоичного «условного кода» задаваемых параметров. При превышении значения порога обнаружения цифрового компаратора выдается сигнал об обнаружении радиолокационной цели. 2 ил.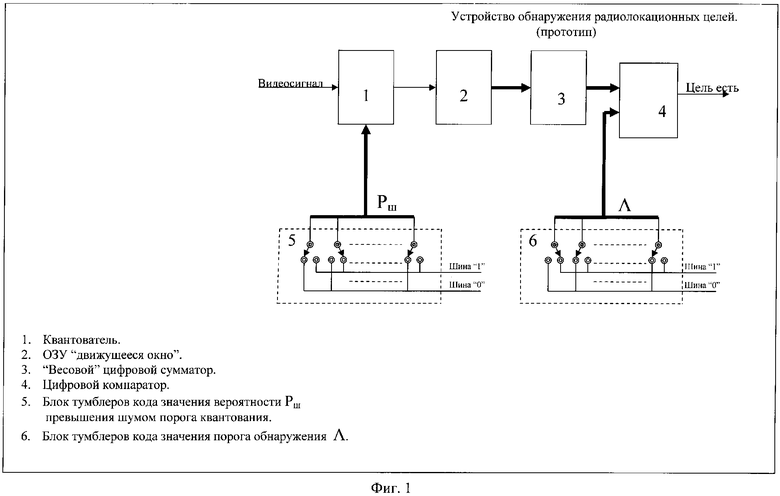
Устройство обнаружения радиолокационных целей, содержащее квантователь, первый вход которого соединен с шиной видеосигнала, оперативное запоминающее устройство «движущееся окно», вход первого разряда которого соединен с выходом квантователя, «весовой» цифровой сумматор, входы которого соединены с выходами оперативного запоминающего устройства «движущееся окно», цифровой компаратор двух m-разрядных сигналов, первый m-разрядный вход которого соединен с m-разрядным выходом сумматора, а выход является выходом устройства, отличающееся тем, что в него введены постоянное запоминающее устройство, каждый адрес которого определяется двоичными «условными кодами» задаваемых параметров, такими как минимальное значение отношения сигнал/шум и вероятность ложной тревоги по шумам приемника РЛС, а записанная заранее информация по этим адресам представляет собою оптимальную пару параметров обнаружения, а именно значение вероятности превышении шумом порога квантования, хранящееся в информационных разрядах с первого по d, и значение порога обнаружения, хранящееся в информационных разрядах с d+1 no d+m, соответствующие задаваемым параметрам, блок тумблеров двоичного «условного кода» значения отношения сигнал/шум, блок тумблеров двоичного «условного кода» значения вероятности ложной тревоги по шумам приемника РЛС, тумблер режима работы постоянного запоминающего устройства, первые входы всех тумблеров соединены с шиной «логическая 1», вторые входы всех тумблеров соединены с шиной «логический 0», одна часть разрядов адресного кода постоянного запоминающего устройства соединена с выходами тумблеров блока тумблеров двоичного «условного кода» значения отношения сигнал/шум, а другая часть разрядов адресного кода постоянного запоминающего устройства соединена с выходами тумблеров блока тумблеров двоичного «условного кода» значения вероятности ложной тревоги по шумам приемника РЛС, выходные информационные разряды с первого по d постоянного запоминающего устройства соединены с входами кода значения вероятности превышения шумом порога квантования квантователя, а выходные информационные разряды с d+1 no d+m постоянного запоминающего устройства соединены со вторым m-разрядным входом цифрового компаратора, d+m входных информационных разрядов постоянного запоминающего устройства соединены с входной шиной записываемых данных, вход «запись/чтение» которого соединен с выходом тумблера режима работы постоянного запоминающего устройства.
| Амплитудно-временной квантователь с регулируемым порогом | 1981 |
|
SU1068851A1 |
| Амплитудный временной квантователь с регулируемым порогом | 1982 |
|
SU1345150A1 |
| ЦИФРОВОЕ УСТРОЙСТВО КВАНТОВАНИЯ ВИДЕОСИГНАЛА НА ФОНЕ КОМБИНИРОВАННОЙ ПОМЕХИ | 2004 |
|
RU2277715C1 |
| WO 9215025 A2, 03.09.1992 | |||
| US 5272725 A, 21.12.1993 | |||
| Способ испытания неподвижного соединения вала с внутренним кольцом подшипника качения | 1990 |
|
SU1730547A1 |

