Изобретение относится к системам, использующим отражение или вторичное излучение радиоволн, например радарным системам, в которых для передачи импульсов используется фазовая модуляция частоты. Заявленный способ может использоваться в устройствах обработки радио- и радиолокационных сигналов для улучшения распознавания широкополосных сигналов на фоне шумов.
В радарных системах от параметров зондирующего сигнала зависят основные характеристики: максимальная дальность действия, точность определения координат и скорость объектов, разрешающая способность по дальности и скорости. В зависимости от предъявляемых требований выбирают тот или другой вид модуляции сигнала. В связи с развитием статистических методов анализа и синтеза устройств обработки сигнала первостепенное значение для характеристики зондирующего сигнала приобрела функция автокорреляции, поскольку оптимальная обработка сигнала включает операцию умножения принятого сигнала на ожидаемый с последующим усреднением результата для уменьшения влияния помех. Автокорреляционная функция является весьма удобной характеристикой, позволяющей оценить потенциальные возможности сигнала и наиболее целесообразно выбрать его параметры и методы обработки. Для получения высокой разрешающей способности, точности и однозначности при измерении дальности и скорости необходим сигнал, автокорреляционная функция которого имеет единственный пик в начале координат. [Радиотехнические системы под ред. Казаринова Ю.М. М.: Советское радио, 1968, глава 3, с 67-72].
Наиболее удовлетворяет сформулированным требованиям сигнал в виде кодированной по фазе последовательности из большого числа импульсов - фазовая (фазокодовая) манипуляция. Сигналы с кодированием по фазе отличаются тем, что в них длинный радиоимпульс разбивается на некоторое число более коротких подимпульсов. Все подимпульсы имеют равную длительность и частоту заполнения; каждый подимпульс передается с определенным значением фазы. Фаза каждого подимпульса выбирается в соответствии с фазовым кодом. Наибольшее распространение получило фазовое кодирование, в котором используются бинарные фазовые коды. Специальный класс бинарных кодов составляют оптимальные коды, или коды Баркера. [Справочник по радиолокации под ред. Скольника М. М.: Советское радио, 1979, раздел 8.5, с.419-420].
Известен способ обнаружения целей импульсной радиолокационной станцией [патент RU №2270461, МПК G01S 13/26, 2006], в котором применена обработка широкополосных сигналов, промодулированных в соответствии с кодом Баркера. При использовании фазокодоманипулированных (ФКМ) сигналов с использованием кода Баркера, в результате сжатия (оптимальной фильтрации) ФКМ сигнала, амплитуда максимального пика результата сжатия равна длине фазового кода, а амплитуда боковых лепестков меньше или равна 1. Максимальная длина кода Баркера равна 13, а отношение пикового значения боковых лепестков АКФ к максимальному пику ∂ для кодов Баркера ≥1/13.
Для уменьшения ∂ используют минимаксные последовательности, но при этом возрастает длина кода и амплитуда боковых лепестков.
Использование минимаксных последовательностей и кодов Баркера не обеспечивает амплитуду боковых лепестков АКФ фазового кода равную нулю, а следовательно, и амплитуду боковых лепестков результата сжатия ФКМ сигнала, промодулированого данным фазовым кодом, равную нулю.
Известен способ уменьшения уровня боковых лепестков в радиолокаторе со сжатием фазокодоманипулированного сигнала [патент RU №2086998, МПК G01S 7/36, 1997], при котором в заданное угловое направление излучают два импульсных фазокодоманипулированных сигнала на разных несущих частотах.
Техническая реализация такого способа значительно затруднена из-за аппаратной сложности приемопередающего устройства.
Технический результат, на который направлено изобретение, состоит в повышении разрешающей способности радарных систем, улучшении распознавания широкополосных сигналов на фоне шумов.
Технический результат достигается тем, что выполняют подавление боковых лепестков автокорреляционной функции широкополосного сигнала. Для этого производят излучение импульсных фазокодоманипулированных сигналов с изменением кода фазовой манипуляции от периода к периоду повторения зондирующих импульсов, прием отраженных сигналов и их обработку. При этом в каждом периоде зондирования излучают один из двух согласованных друг с другом фазокодоманипулированных сигналов, у которых амплитуды боковых лепестков автокорреляционных функций равны по модулю, но имеют противоположные знаки, а основные пики автокорреляционных функций равны. При приеме отраженных сигналов производят их сжатие (оптимальную фильтрацию) отдельно для каждого периода повторения зондирующих импульсов, суммируют результаты сжатия с задержкой первого результата относительно второго, на период зондирования, в соответствии с временным положением согласованных друг с другом фазокодоманипулированных сигналов.
Сущность изобретения поясняется следующим образом.
Если фазокодоманипулированные сигналы были согласованы, то уровень боковых лепестков результата суммирования будет равен нулю, а полезный сигнал (основной пик) увеличится в два раза.
Формируется два разных сигнала с кодированием по фазе и одинаковой длины так, что амплитуды максимальных пиков автокорреляционных функций для данных сигналов были бы равны N, где N - число элементов или длина фазового кода. Значения боковых лепестков АКФ одного сигнала равны по модулю значениями боковых лепестков АКФ второго сигнала, но имеют разные знаки. Такие последовательности (коды) будем называть совместимыми, а ФКМ сигналы, промодулированные в соответствии с совместимыми фазовыми кодами - согласованными сигналами.
Фазовые коды - совместимы, если количество их элементов N кратно двум:

Из любого из совместимых фазовых кодов длиной N можно получить совместимые фазовые коды длиной 2×N и N/2. Но не все фазовые коды, удовлетворяющие (1), являются совместимыми. На фиг.1 приведена структурная схема, используя которую построены совместимые фазовые коды для ФКМ сигналов длиной шестнадцать.
На структурной схеме условно обозначены цифрами с 1 по 40, соответственно триггеры с первого по сороковой, в которых записываются элементы фазовых кодов. Триггеры с первого по восьмой образуют формирователь исходного кода 41, в котором записываются элементы Si, соответствующие исходному коду, длиной, равной восемь (от S0 до S7). Триггеры с девятого по двадцать четвертый образуют формирователь первой совместимой последовательности 42, в котором записываются элементы Аi, длина фазового кода равна шестнадцати (от A0 до A15). Триггеры с двадцать пятого по сороковой образуют формирователь второй совместимой последовательности 43, в котором записываются элементы Вi, длина фазового кода равна шестнадцати (от В0 до B15). Цифрами с 44 по 55 обозначены инверторы, соответственно с первого по двенадцатый.
На схеме первый триггер 1 соединен с девятым триггером 9 и через четвертый инвертор 47 с двадцать четвертым триггером 24. Второй триггер 2 соединен с десятым триггером 10 и через третий инвертор 46 с двадцать третьим триггером 23. Третий триггер 3 соединен с одиннадцатым 11 и с двадцать вторым триггерами 22. Четвертый триггер 4 соединен с двенадцатым 12 и двадцать первым триггерами 21. Пятый триггер 5 соединен с тринадцатым триггером 13 и через второй инвертор 45 с двадцатым триггером 20. Шестой триггер 6 соединен с четырнадцатым триггером 14 и через первый инвертор 44 с девятнадцатым триггером 19. Седьмой триггер 7 соединен с пятнадцатым 15 и с восемнадцатым 18 триггерами. Восьмой триггер 8 соединен с шестнадцатым 16 и с семнадцатым 17 триггерами. Выход девятого триггера 9 через пятый инвертор 48 соединен с двадцать пятым 25 триггером. Выход десятого 10 триггера через шестой инвертор 49 соединен с двадцать шестым триггером 26. Выход одиннадцатого триггера 11 соединен с двадцать седьмым триггером 27. Выход двенадцатого триггера 12 соединен с двадцать восьмым триггером 28. Выход тринадцатого триггера 13 через седьмой инвертор 50 соединен с двадцать девятым триггером 29. Выход четырнадцатого триггера 14 через седьмой инвертор 51 соединен с тридцатым триггером 30. Выход пятнадцатого триггера 15 соединен с тридцать первым триггером 31. Выход шестнадцатого триггера 16 соединен с тридцать вторым триггером 32. Выход семнадцатого триггера 17 через девятый инвертор 52 соединен с тридцать третьим триггером 33. Выход восемнадцатого триггера 18 через десятый инвертор 53 соединен с тридцать четвертым триггером 34. Выход девятнадцатого триггера 19 соединен с тридцать пятым триггером 35. Выход двадцатого триггера 20 соединен с тридцать шестым триггером 36. Выход двадцать первого триггера 21 через одиннадцатый инвертор 54 соединен с тридцать седьмым триггером 37. Выход двадцать второго триггера 22 через двенадцатый инвертор 55 соединен с тридцать восьмым триггером 38. Выход двадцать третьего триггера 23 соединен с тридцать девятым триггером 39. Выход двадцать четвертого триггера 24 соединен с сороковым триггером 40.
На приведенной схеме из исходного кода Si получаются два совместимых фазовых кода: первый Аi и второй Вi. Исходный код Si соответствует разрядам восьмиразрядного счетчика с шагом единица. Исходный код Si изменяется до тех пор, пока не будут получены первый Аi и второй Вi совместимые фазовые коды. Таким образом, исходная последовательность формируется перебором, а полученные две фазовые последовательности анализируются на совместимость их АКФ. Указанная операция осуществляется с помощью ЭВМ.
Подобная схема реализуема для получения совместимых кодов длиной N=2n, где n - целое число и n≥2. При этом длина исходного кода Si равна N/2. Первая половина первого фазового кода Аi совпадает с исходным кодом Si, Аi=Si, при 0≤i<N/2. Вторая половина первого фазового кода A(N-1)-i=Si, где 0≤i<N/2. При этом вторая половина первого фазового кода Аi подвергается побитовой инверсии с шагом step (1≤step≤N/4 и step кратно двум), то есть инвертируются step элементов второй половины кода, затем step элементов пропускаются, и так до конца первого фазового кода Аi. Например, для устройства, схема которого изображена на фиг.1, step=2, поэтому при получении элементов первого фазового кода Ai: A15, А14 и А11, А10 используют инверторы, а для элементов А13, А12 и А9, А8 инверторы не используют.
Второй фазового код Вi получают из первого фазового кода Аi путем побитовой инверсии с шагом step так же, как и для второй половины фазового кода Аi, но только второй фазовый код Вi инвертируется полностью.
Используя совместимые фазовые коды длиной N/2 и подобную схему, получены совместимые фазовые коды длиной N, если в качестве исходного кода Si использовать любой из имеющихся совместимых кодов длиной N/2.
На фиг.4 в таблице приведен пример совместимых фазовых кодовых последовательностей длиной N=32.
Сформированные ФКМ сигналы излучают в разные периоды зондирования поочередно, в одном угловом направлении. Отраженные сигналы на приемной стороне подвергают оптимальной фильтрации (сжатию) отдельно для каждого периода зондирования. А результаты оптимальной фильтрации двух последовательных периодов зондирования складываются.
На фиг.2 изображено устройство для реализации заявленного способа. Устройство состоит из первого ключа 56, первого оптимального фильтра 57, второго оптимального фильтра 58, первого элемента задержки 59, второго элемента задержки 60, второго ключа 61, третьего ключа 62 и сумматора 63. Вход первого ключа 56 является входом устройства. Первый выход первого ключа 56 соединен с входом первого оптимального фильтра 57, выход которого соединен с входом первого элемента задержки 59 и первым входом второго ключа 61. Выход первого элемента задержки 59 соединен со вторым входом второго ключа 61, выход которого соединен с первым входом сумматора 63, выход которого является выходом устройства. Второй выход первого ключа 56 соединен с входом второго оптимального фильтра 58, выход которого соединен с входом второго элемента задержки 60 и вторым входом третьего ключа 62. Выход второго элемента задержки 60 соединен с первым входом третьего ключа 62, выход которого соединен со вторым входом сумматора 63. Управляющий импульс 64 поступает на управляющие входы первого 56, второго 61 и третьего ключей 62.
Работает устройство следующим образом.
Управляющий импульс 64 управляет положениями первого 56, второго 61 и третьего 62 ключей устройства в соответствии с периодом зондирования. Первый оптимальный фильтр 57 согласован с первым, совместим фазовым кодом, второй оптимальный фильтр 58 согласован со вторым, совместим фазовым кодом.
Первый период зондирования.
При приеме первого зондирующего сигнала А, соответствующего первому согласованному фазовому коду, управляющий импульс 64 устанавливает первый 56, второй 61 и третий 62 ключи в положение один. Принятый сигнал А через первый ключ 56 поступает на первый оптимальный фильтр 57, где производится его сжатие. С выхода первого оптимального фильтра 57 сигнал А1, соответствующий результату сжатия, поступает на первый элемент задержки 59 (время задержки равно периоду зондирования).
Второй период зондирования.
Управляющий импульс 64 устанавливает первый 56, второй 61 и третий 62 ключи в положение два. Принятый сигнал В, соответствующий второму согласованному фазовому коду, через первый ключ 56 поступает на второй оптимальный фильтр 58, где производится его сжатие. С выхода второго оптимального фильтра 58 сигнал В1, соответствующий результату сжатия, поступает на второй элемент задержки 60 (время задержки равно периоду зондирования) и через третий ключ 62 на второй вход сумматора 63. В это же время на первый вход сумматора 63 через второй ключ 61 с выхода первого элемента задержки 59 поступает сигнал А1', равный сигналу А1, но задержанный на один период зондирования. Поскольку АКФ для согласованных сигналов А и В имеют равные по модулю, но противоположные по знаку амплитуды боковых лепестков, то при сложении они взаимно компенсируются. Основной пик АКФ первого согласованного сигнала А равен основному пику второго согласованного сигнала В, поэтому при сложении значение основного пика суммарного сигнала удвоится.
Третий период зондирования.
Управляющий импульс 64 устанавливает первый 56, второй 61 и третий 62 ключи в положение один. Принятый сигнал А через первый ключ 56 поступает на первый оптимальный фильтр 57, где производится его сжатие. С выхода первого оптимального фильтра 57 сигнал А1, соответствующий результату сжатия, поступает на первый элемент задержки 59 и через второй ключ 61 на первый вход сумматора 63. В это же время на второй вход сумматора 63 через третий ключ 62 с выхода второго элемента задержки 60 поступает сигнал В1', равный сигналу В1, но задержанный на один период зондирования. В этот период зондирования складываются сигналы В1' и А2, которые являются согласованными между собой, соответственно результат суммирования аналогичен предыдущему периоду зондирования.
Далее работа схемы повторяется, начиная со второго периода зондирования.
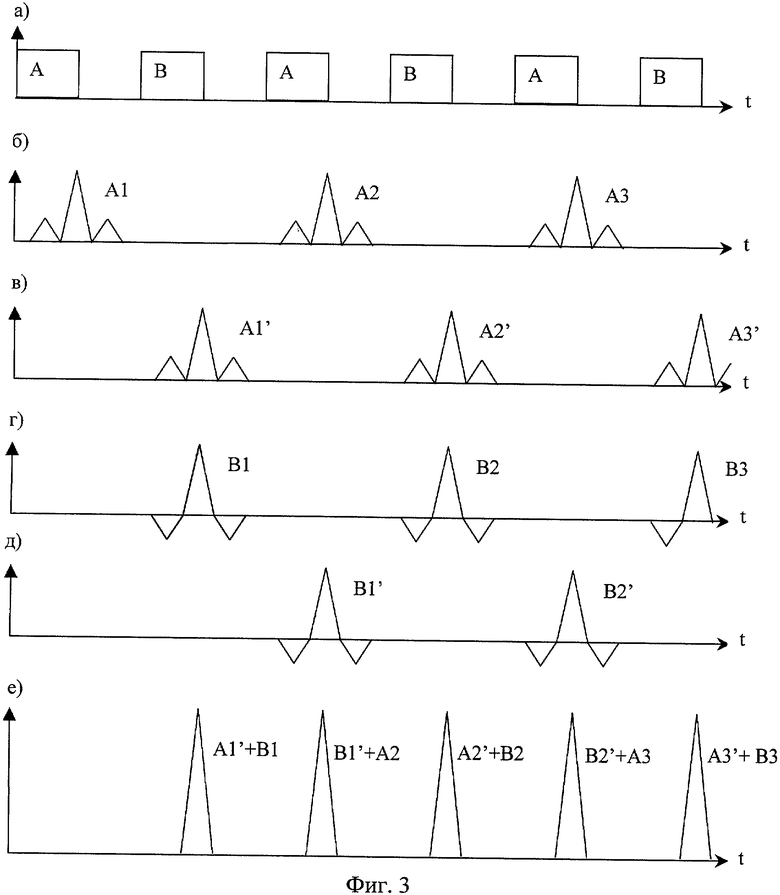
Для пояснения работы схемы приведена диаграмма сигналов фиг.3, на которой показаны:
а) отраженные принятые ФКМ сигналы, где А соответствует приему первого согласованного сигнала, а В - второму согласованному сигналу;
б) сигнал на выходе первого оптимального фильтра 57, работающего с первым согласованным сигналом;
в) сигнал б) на выходе первого элемента задержки 59 (время задержки равно периоду зондирования);
г) сигнал на выходе второго оптимального фильтра 58, работающего со вторым согласованным сигналом;
д) сигнал г) на выходе второго элемента задержки 60 (время задержки равно периоду зондирования);
е) сигнал на выходе сумматора 63 результатов оптимальной фильтрации.
Из вышеизложенного ясно, что после сжатия одного и второго ФКМ сигнала получено отношение пикового значения боковых лепестков АКФ к максимуму хуже, чем для ФКМ сигнала, промодулированного в соответствии с кодом Баркера, максимальной длины, равной тринадцати. Но если просуммировать результат сжатия, то уровень боковых лепестков будет равен нулю, а основной пик увеличится в два раза.
Таким образом, использование согласованных сигналов в радарных системах повышает разрешающую способность систем, а в средствах связи значительно повышает помехоустойчивость каналов связи. Тем более что, как было показано выше, возможно получить согласованные ФКМ сигналы любой длины, кратной двум, при этом уровень боковых лепестков АКФ суммарного сигнала останется равным нулю, а основной пик будет увеличиваться с увеличением длины согласованных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДАВЛЕНИЯ БОКОВЫХ ЛЕПЕСТКОВ АВТОКОРРЕЛЯЦИОННОЙ ФУНКЦИИ ШИРОКОПОЛОСНОГО СИГНАЛА | 2012 |
|
RU2503971C1 |
| СПОСОБ СПЕКТРАЛЬНОЙ ОБРАБОТКИ ДОПОЛНИТЕЛЬНЫХ СИГНАЛОВ | 2012 |
|
RU2504798C1 |
| СПОСОБ ДВУХТАКТНОЙ СПЕКТРАЛЬНОЙ ОБРАБОТКИ ДОПОЛНИТЕЛЬНЫХ СИГНАЛОВ | 2013 |
|
RU2536169C1 |
| Способ обработки радиолокационного сигнала с фазовой модуляцией | 2019 |
|
RU2731546C1 |
| Способ измерения поляризационной матрицы рассеяния объекта | 2016 |
|
RU2619769C1 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2021 |
|
RU2759117C1 |
| УСТРОЙСТВО ОБРАБОТКИ ПАРНОГО D-КОДА | 2020 |
|
RU2745843C1 |
| СПОСОБ РАДИОЛОКАЦИИ | 2023 |
|
RU2804395C1 |
| СПОСОБ УМЕНЬШЕНИЯ УРОВНЯ БОКОВЫХ ЛЕПЕСТКОВ В РАДИОЛОКАТОРЕ СО СЖАТИЕМ ФАЗОКОДОМАНИПУЛИРОВАННОГО СИГНАЛА | 1993 |
|
RU2086998C1 |
| Способ подавления боковых лепестков ЛЧМ-сигнала с межпериодным расширением спектра | 2016 |
|
RU2624769C1 |


Заявленный способ может использоваться в устройствах обработки радио- и радиолокационных сигналов для улучшения распознавания широкополосных сигналов на фоне шумов. Сущность способа состоит в том, что в каждом периоде зондирования излучают один из двух, согласованных друг с другом, фазокодоманипулированных сигналов, на приемной стороне производится сжатие - оптимальная фильтрация - принятых сигналов отдельно для каждого периода излучения, а результаты оптимальной фильтрации двух последовательных периодов зондирования складываются; при этом если фазокодоманипулированные сигналы были согласованы, то уровень боковых лепестков результата суммирования будет равен нулю. Достигаемый технический результат состоит в улучшение качества распознавания радиосигналов на фоне шумов. 4 ил.
Способ подавления боковых лепестков автокорреляционной функции широкополосного сигнала, включающий излучение импульсных фазокодоманипулированных сигналов с изменением кода фазовой манипуляции от периода к периоду повторения зондирующих импульсов, прием отраженных сигналов и их обработку, отличающийся тем, что в каждом периоде зондирования излучают один из двух согласованных друг с другом фазокодоманипулированных сигналов, у которых амплитуды боковых лепестков автокорреляционных функций равны по модулю, но имеют противоположные знаки, а основные пики автокорреляционных функций равны, при приеме отраженных сигналов производят их сжатие отдельно для каждого периода повторения зондирующих импульсов, суммируют результаты сжатия отраженных сигналов с задержкой первого результата относительно второго на период зондирования, в соответствии с временным положением согласованных друг с другом фазокодоманипулированных сигналов.
| СПОСОБ УМЕНЬШЕНИЯ УРОВНЯ БОКОВЫХ ЛЕПЕСТКОВ В РАДИОЛОКАТОРЕ СО СЖАТИЕМ ФАЗОКОДОМАНИПУЛИРОВАННОГО СИГНАЛА | 1993 |
|
RU2086998C1 |
| СПОСОБ ИМПУЛЬСНОЙ РАДИОЛОКАЦИИ СИСТЕМОЙ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 1996 |
|
RU2107926C1 |
| Цифровой многоканальный коррелятор периодических фазоманипулированных сигналов | 1978 |
|
SU734716A1 |
| US 5732002 A, 24.03.1998 | |||
| WO 2006078314 A2, 27.07.2006. | |||

