Изобретение относится к системам, использующим отражение или вторичное излучение радиоволн, например, к радарным, в которых для передачи импульсов используется фазовая модуляция частоты. Заявляемый способ может использоваться в устройствах обработки радио- и радиолокационных сигналов для улучшения распознавания широкополосных сигналов на фоне шумов.
В радарных системах от параметров зондирующего сигнала зависят основные характеристики: максимальная дальность действия, точность определения координат и скорости объектов, разрешающая способность по дальности и скорости. В зависимости от предъявляемых требований выбирают тот или другой вид модуляции сигнала. В связи с развитием статистических методов анализа и синтеза устройств обработки сигнала первостепенное значение для характеристики зондирующего сигнала приобрела функция автокорреляции, поскольку оптимальная обработка сигнала включает операцию умножения принятого сигнала на ожидаемый с последующим усреднением результата для уменьшения влияния помех. Автокорреляционная функция (АКФ) является весьма удобной характеристикой, позволяющей оценить потенциальные возможности сигнала и наиболее целесообразно выбрать его параметры и методы обработки. Для получения высокой разрешающей способности, точности и однозначности при измерении дальности и скорости необходим сигнал, автокорреляционная функция которого имеет единственный пик в начале координат [Радиотехнические системы под ред. Ю.М.Казаринова, «Советское радио», Москва, 1968, глава 3, с 67-72].
Наиболее удовлетворяет сформулированным требованиям сигнал в виде кодированной по фазе последовательности из большого числа импульсов - фазовая (фазокодовая) манипуляция. Сигналы с кодированием по фазе отличаются тем, что в них длинный радиоимпульс разбивается на некоторое число более коротких подимпульсов. Все подимпульсы имеют равную длительность и частоту заполнения. Каждый подимпульс передается с определенным значением фазы, которая выбирается в соответствии с фазовым кодом. Наибольшее распространение получило фазовое кодирование, в котором используются бинарные фазовые коды. Специальный класс бинарных кодов составляют оптимальные коды, или коды Баркера [Справочник по радиолокации под ред. М. Скольника, Москва, «Советское радио», 1979, раздел 8.5, с 419-420].
Известен способ обнаружения целей импульсной радиолокационной станцией [Патент RU №2270461, МПК G01S 13/26, 2006], в котором применена обработка широкополосных сигналов, промодулированных в соответствии с кодом Баркера. При использовании фазокодоманипулированных (ФКМ) сигналов с использованием кода Баркера в результате сжатия (оптимальной фильтрации) ФКМ сигнала амплитуда максимального пика результата сжатия равна длине фазового кода, а амплитуда боковых лепестков меньше или равна 1. Максимальная длина кода Баркера равна 13, а отношение пикового значения боковых лепестков АКФ к максимальному пику ∂ для кодов Баркера больше или равно 1/13.
Для уменьшения максимального пика ∂ использованы минимаксные последовательности, однако при этом возрастают длина кода и амплитуда боковых лепестков АКФ.
Использование минимаксных последовательностей и кодов Баркера не обеспечивает амплитуду боковых лепестков АКФ фазового кода равную нулю, а, следовательно, и амплитуду боковых лепестков результата сжатия ФКМ сигнала равную нулю.
В качестве прототипа для заявляемого способа выбран способ подавления боковых лепестков автокорреляционной функции широкополосного сигнала [Патент RU №2335782, МПК G01S 7/36 2006], в котором в каждом периоде зондирования излучают один из двух, согласованных друг с другом фазокодоманипулированных сигналов, у которых амплитуды боковых лепестков автокорреляционных функций равны по модулю, но имеют противоположные знаки, а основные пики автокорреляционных функций равны. При приеме отраженных сигналов производят их сжатие (оптимальную фильтрацию) отдельно для каждого периода повторения зондирующих импульсов, суммируют результаты сжатия с задержкой первого результата относительно второго на период зондирования в соответствии с временным положением согласованных друг с другом фазокодоманипулированных сигналов. Если фазокодоманипулированные сигналы были согласованы, то уровень боковых лепестков результата суммирования будет равен нулю, а полезный сигнал (основной пик) увеличится в два раза.
Недостаток данного способа заключается в сильной зависимости результата суммирования от доплеровской добавки к частоте отраженного сигнала (эффект Доплера). При нулевом доплеровском смещении сигналы, принятые в разных периодах излучения, складываются, взаимно компенсируя боковые лепестки своих АКФ. Наличие же доплеровской добавки от подвижной цели приводит к тому, что между двумя сигналами, принятыми в разные периоды зондирования, возникает фазовый сдвиг, приводящий к ошибкам суммирования двух АКФ и увеличению уровня боковых лепестков. Для иллюстрации данного эффекта на фиг.1 представлен график, на котором по горизонтальной оси отложены значения отношения частоты доплеровской добавки fd к частоте повторения зондирования FП, а по вертикальной оси значения уровня боковых лепестков суммарной АКФ (отношения максимального бокового лепестка суммарной АКФ к основному пику) в дБ для кодов длинной шестнадцать. Из уровня техники [Методы и устройства обработки сигналов в радиотехнических системах. Межвузовский сборник научных трудов, выпуск 6, Рязань, 2012, с.52] известно, что данная зависимость может быть описана соотношением:
УБЛ∑=УБЛkod·tg(π·fd/FП),
где УБЛ∑ - уровень боковых лепестков суммарной АКФ;
УБЛkod - уровень боковых лепестков АКФ любого из пары согласованных сигналов;
fd - частота доплеровской добавки;
FП - частота повторения зондирования.
Как видно из графика на фиг 1. при увеличении отношения |fd/FП| уровень боковых лепестков суммарной АКФ стремительно растет, и при |fd/FП|>0.125 уровень боковых лепестков превышает - 22 дБ (13 раз). Следовательно, при |fd/FП|>0.125 боковые лепестки достигли уровня, присущего коду Баркера максимальной длины, что можно считать ограничением использования ФКМ сигналов.
Технический результат заявляемого изобретения направлен на компенсацию доплеровского эффекта и, следовательно, на повышение разрешающей способности радарных систем и повышение помехоустойчивости канала связи в средствах связи.
Технический результат заявляемого способа подавления боковых лепестков автокорреляционной функции широкополосного сигнала достигается тем, что производят излучение импульсных фазокодоманипулированных сигналов с изменением кода фазовой манипуляции от периода к периоду зондирования, выполняют прием отраженных сигналов и их обработку, при этом в каждом периоде зондирования излучают один из двух, согласованных друг с другом фазокодоманипулированных сигналов, у которых амплитуды боковых лепестков автокорреляционных функций равны по модулю, но имеют противоположные знаки, а основные пики автокорреляционных функций равны. При приеме отраженных сигналов производят их сжатие отдельно для каждого периода зондирования, суммируют результаты сжатия отраженных сигналов с задержкой всех предшествующих результатов сжатия относительно последнего в соответствии с временным положением согласованных друг с другом фазокодоманипулированных сигналов. При этом для получения суммарной автокорреляционной функции используют два или более результатов сжатия, умноженных на весовые коэффициенты, в качестве которых используют элементы треугольника Паскаля.
Сущность изобретения состоит в том, что для подавления боковых лепестков автокорреляционной функции (АКФ) широкополосного сигнала используют два согласованных фазокодоманипулированных (ФКМ) сигнала, у которых амплитуды боковых лепестков АКФ равны по модулю, но имеют противоположные знаки, а основные пики АКФ равны. ФКМ сигналы излучают поочередно последовательно от периода к периоду зондирования в одном угловом направлении. При приеме отраженных сигналов производят их сжатие (оптимальную фильтрацию) отдельно для каждого периода зондирования i, при этом каждый результат сжатия Ri, умножают на соответствующий весовой коэффициент ki с получением отсчетов результатов сжатия kiRi.
В качестве весовых коэффициентов ki используют элементы треугольника Паскаля [Андерсон Джеймс А. Дискретная математика и комбинаторика.: Пер. с англ. - М.: Издательский дом "Вильяме", 2004, ISBN 5-8459-0498-6 (рус.) с.339]. При этом элементы берут из той строки треугольника Паскаля, номер которой будет соответствовать количеству n периодов зондирования.
Для получения суммарной АКФ R∑ выполняют суммирование отсчетов результатов сжатия kiRi отраженных сигналов.
Уровень боковых лепестков суммарной АКФ УБЛ∑ будет пропорционален зависимости tgn-1(π·fd/FП), при 0≤|fd/FП|<0.25, где n - число периодов зондирования, используемых для получения суммарной АКФ; fd - частота доплеровской добавки; FП - частота повторения зондирования.
Суммарную АКФ определяют по следующей формуле:
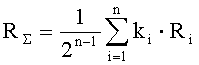 , где n≥2.
, где n≥2.
Так как весовые коэффициенты ki выбирают согласно треугольнику Паскаля, в котором сумма элементов каждой его строки равна 2n-1, то для нормировки амплитуды суммарной АКФ предлагается использовать нормирующий множитель, равный 1/2n-1, который приводит уровень амплитуды суммарной АКФ к уровню амплитуды отсчетов результатов сжатия.
Зависимость уровня боковых лепестков суммарной АКФ УБЛ∑ от |fd/FП| будет иметь вид:
УБЛ∑=УБЛkod·tgn-1(π·fd/FП),
где УБЛkod - уровень боковых лепестков АКФ любого из пары согласованных сигналов.
Так при n=2, суммарная АКФ R∑ будет определяться суммой отсчетов результатов сжатия первого k1R1 и второго k2R2 периодов зондирования соответственно. При этом весовые коэффициенты в соответствии с треугольником Паскаля будут равны k1/=k2=1:
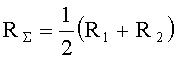 ,
,
УБЛ∑=УБЛkod·tg(π·fd/FП).
При n=3 суммарная АКФ R∑ будет зависеть от суммы k1R1, k2R2 и k3R3, где весовые коэффициенты в соответствии с треугольником Паскаля будут равны k1=1, k2=2, k3=1:
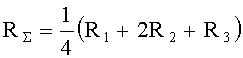 ,
,
УБЛ∑=УБЛkod·tg2(π·fd/FП).
При n=4, весовые коэффициенты соответственно равны k1=1, k2=3, k3=3, k4=1:
 ,
,
УБЛ∑=УБЛkod·tg3(π·fd/FП).
При n=5, весовые коэффициенты k1=1, k2=4, k3=6, k4=4, k5=1:
 ,
,
УБЛ∑=УБЛkod·tg4(π·fd/FП).
При n=6, весовые коэффициенты k1=1, k2=5, k3=10, k4=10, k5=5, k6=1:
 ,
,
УБЛ∑=УБЛkod·tg5(π·fd/FП). И т.д.
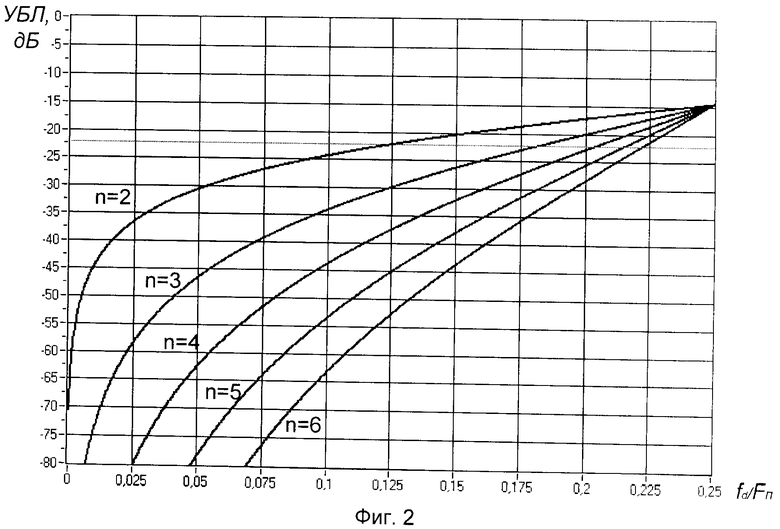
Зависимость уровня боковых лепестков результата суммирования от доплеровского эффекта будет тем меньше, чем больше периодов зондирования используется для получения суммарной АКФ.
Для иллюстрации данного эффекта на фиг.2 представлен график, на котором показаны зависимости УБЛ∑ от |fd/fП| для различных значений числа используемых периодов n. Чем больше n, тем меньше УБЛ∑ в области малых значений |fd/fП|. Так, например, при n=3 и УБЛ∑=-22 дБ (что соответствует боковым лепесткам кода Баркера максимальной длины) отношение |fd/fП|=0.176, а это значит, что в заявляемом способе диапазон доплеровских частот, до которого есть выигрыш по отношению к коду Баркера, расширился по сравнению с результатом, полученным при n=2 в  раза, т.е. на 40,8%. При n=4 и УБЛ∑=-22 дБ диапазон доплеровских частот в заявляемом способе расширится в
раза, т.е. на 40,8%. При n=4 и УБЛ∑=-22 дБ диапазон доплеровских частот в заявляемом способе расширится в  раза, т.е. на 64%. И т.д.
раза, т.е. на 64%. И т.д.
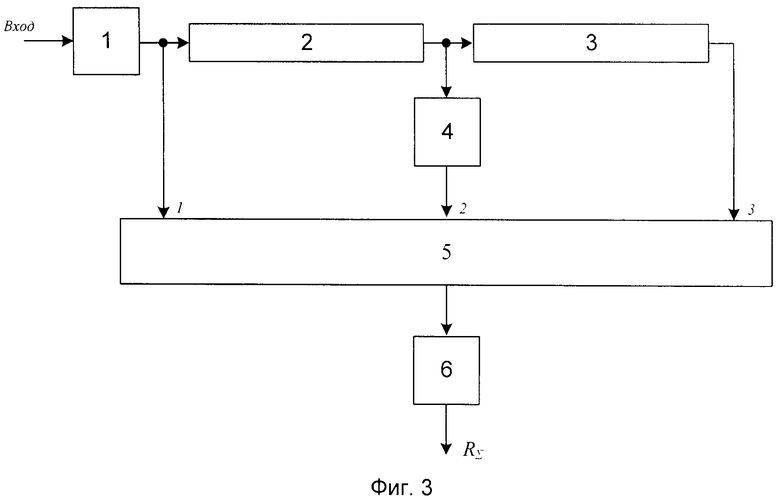
На фиг.3 изображено устройство для обработки принятых отраженных сигналов и получения суммарной АКФ для трех периодов зондирования (n=3). При этом реализуется формула:
 .
.
Устройство состоит из управляемого оптимального фильтра (УОФ) 1, первого 2 и второго 3 элементов задержки, умножителя на два 4, сумматора 5, делителя на четыре 6. Вход УОФ 1 является входом устройства, на который поступают отраженные сигналы. Выход УОФ 1 соединен с входом первого элемента задержки 2 и с первым входом сумматора 5. Выход первого элемента задержки 2 соединен с входом второго элемента задержки 3 и входом умножителя на два 4. Выход умножителя на два 4 соединен со вторым входом сумматора 5. Выход второго элемента задержки 3 соединен с третьим входом сумматора 5. Выход сумматора 5 соединен с входом делителя на четыре 6. Выход делителя на четыре 6 является выходом устройства.
Обработка отраженных сигналов и получение суммарной АКФ реализуется устройством (фиг.3) следующим образом.
В каждом периоде зондирования УОФ 1 согласован с используемым в данном периоде излученным ФКМ сигналом и производит сжатие соответствующего ему отраженного сигнала. Первый 2 и второй 3 элементы задержки задерживают поступающие на них с УОФ сжатые сигналы на период зондирования.
Первый период зондирования.
Первый принятый отраженный сигнал поступает на вход УОФ 1, где производится его сжатие. Результат сжатия первого принятого сигнала R1, сохраняется в первом элементе задержки 2.
Второй период зондирования.
Второй принятый отраженный сигнал поступает на вход УОФ 1, где производится его сжатие, при этом результат сжатия первого принятого сигнала R1, сохраненный в первом элементе задержки 2 в первый период зондирования, переписывается во второй элемент задержки 3. Результат сжатия второго принятого сигнала R2 сохраняется в первом элементе задержки 2.
Третий период зондирования.
Третий принятый отраженный сигнал поступает на вход УОФ 1, где производится его сжатие. С выхода УОФ 1 результат сжатия третьего сигнала R3 поступает на первый вход сумматора 5 (без задержки) и на первый элемент задержки 2. Результат сжатия второго сигнала R2, с выхода первого элемента задержки 2 поступает на вход умножителя на два 4 и на второй элемент задержки 3 (время задержки R2, равно одному периоду зондирования). С выхода умножителя на два 4 усиленный результат сжатия второго принятого сигнала R2 поступает на второй вход сумматора 5. Результат сжатия первого принятого сигнала R1, с выхода второго элемента задержки 3 поступает на третий вход сумматора 5 (время задержки R1, равно двум периодам зондирования). С выхода сумматора 5 суммарный сигнал (R1+2R2,+R3) подается на делитель на четыре 6 для нормировки амплитуды суммарного сигнала. Сигнал па выходе делителя на четыре 6 является результирующим, а его АКФ является суммарной АКФ для трех периодов зондирования:
 .
.
Обработка отраженных сигналов включает в себя задержку всех предшествующих последнему результатов сжатия Ri, которая осуществляется в соответствии с временным положением согласованных друг с другом ФКМ сигналов, на число периодов зондирования, кратное разнице между общим числом периодов зондирования n и номером текущего периода зондирования i (n-i).
Таким образом, использование двух согласованных ФКМ сигналов, излученных поочередно последовательно от периода к периоду зондирования, для которых сумма их АКФ определяется с учетом весового взвешивания результатов сжатия перед суммированием с использованием треугольника Паскаля, позволяет уменьшить влияние доплеровского эффекта на результат суммирования. В радарных системах это повышает разрешающую способность системы, а в средствах связи помехоустойчивость канала связи.
Промышленная применимость данного способа возможна, исходя из того, что все используемые операции (умножение, деление и суммирование) практически реализуемы в аналоговой и цифровой технике, а также программным способом в вычислительной технике.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СПЕКТРАЛЬНОЙ ОБРАБОТКИ ДОПОЛНИТЕЛЬНЫХ СИГНАЛОВ | 2012 |
|
RU2504798C1 |
| СПОСОБ ДВУХТАКТНОЙ СПЕКТРАЛЬНОЙ ОБРАБОТКИ ДОПОЛНИТЕЛЬНЫХ СИГНАЛОВ | 2013 |
|
RU2536169C1 |
| СПОСОБ ПОДАВЛЕНИЯ БОКОВЫХ ЛЕПЕСТКОВ АВТОКОРРЕЛЯЦИОННОЙ ФУНКЦИИ ШИРОКОПОЛОСНОГО СИГНАЛА | 2007 |
|
RU2335782C1 |
| Способ обработки радиолокационного сигнала с фазовой модуляцией | 2019 |
|
RU2731546C1 |
| СПОСОБ УМЕНЬШЕНИЯ УРОВНЯ БОКОВЫХ ЛЕПЕСТКОВ В РАДИОЛОКАТОРЕ СО СЖАТИЕМ ФАЗОКОДОМАНИПУЛИРОВАННОГО СИГНАЛА | 1993 |
|
RU2086998C1 |
| УСТРОЙСТВО ОБРАБОТКИ ПАРНОГО D-КОДА | 2020 |
|
RU2745843C1 |
| Способ подавления боковых лепестков ЛЧМ-сигнала с межпериодным расширением спектра | 2016 |
|
RU2624769C1 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2021 |
|
RU2759117C1 |
| СПОСОБ РАДИОЛОКАЦИИ | 2023 |
|
RU2804395C1 |
| СПОСОБ ИМПУЛЬСНОЙ РАДИОЛОКАЦИИ СИСТЕМОЙ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 1996 |
|
RU2107926C1 |
Изобретение относится к системам, использующим отражение или вторичное излучение радиоволн. Достигаемый технический результат заявляемого изобретения - компенсация доплеровского эффекта и, следовательно, повышение разрешающей способности радарных систем и повышение помехоустойчивости канала связи в средствах связи. Технический результат заявляемого способа достигается тем, что производят излучение импульсных фазокодоманипулированных сигналов с изменением кода фазовой манипуляции от периода к периоду зондирования, выполняют прием отраженных сигналов и их обработку, при этом в каждом периоде зондирования излучают один из двух, согласованных друг с другом фазокодоманипулированных сигналов, у которых амплитуды боковых лепестков автокорреляционных функций равны по модулю, но имеют противоположные знаки, а основные пики автокорреляционных функций равны. При приеме отраженных сигналов производят их сжатие отдельно для каждого периода зондирования, суммируют результаты сжатия отраженных сигналов с задержкой всех предшествующих результатов сжатия относительно последнего в соответствии с временным положением согласованных друг с другом фазокодоманипулированных сигналов, при этом для получения суммарной автокорреляционной функции используют два или более результата сжатия, умноженных на весовые коэффициенты, в качестве которых используют элементы треугольника Паскаля. 3 ил.
Способ подавления боковых лепестков автокорреляционной функции широкополосного сигнала, в котором производят излучение импульсных фазокодоманипулированных сигналов с изменением кода фазовой манипуляции от периода к периоду зондирования, выполняют прием отраженных сигналов и их обработку, при этом в каждом периоде зондирования излучают один из двух, согласованных друг с другом фазокодоманипулированных сигналов, у которых амплитуды боковых лепестков автокорреляционных функций равны по модулю, но имеют противоположные знаки, а основные пики автокорреляционных функций равны, при приеме отраженных сигналов производят их сжатие отдельно для каждого периода зондирования, суммируют результаты сжатия отраженных сигналов с задержкой всех предшествующих результатов сжатия относительно последнего в соответствии с временным положением согласованных друг с другом фазокодоманипулированных сигналов, отличающийся тем, что используют два или более результатов сжатия, умноженных на весовые коэффициенты, в качестве которых используют элементы треугольника Паскаля, при этом элементы берут из той строки треугольника Паскаля, номер которой будет соответствовать количеству n периодов зондирования.
| СПОСОБ ПОДАВЛЕНИЯ БОКОВЫХ ЛЕПЕСТКОВ АВТОКОРРЕЛЯЦИОННОЙ ФУНКЦИИ ШИРОКОПОЛОСНОГО СИГНАЛА | 2007 |
|
RU2335782C1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ПОМЕХ В РЕАЛЬНОМ ВРЕМЕНИ | 2002 |
|
RU2271066C2 |
| СПОСОБ УМЕНЬШЕНИЯ УРОВНЯ БОКОВЫХ ЛЕПЕСТКОВ СЖАТОГО ЛЧМ-СИГНАЛА | 2010 |
|
RU2447455C1 |
| СПОСОБ ИМПУЛЬСНОЙ РАДИОЛОКАЦИИ СИСТЕМОЙ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 1996 |
|
RU2107926C1 |
| US 8115679 B2, 14.02.2012 | |||
| US 2010194626 A1, 01.09.2007 | |||
| Способ обработки плоскости | 1983 |
|
SU1139576A1 |
| WO 2005116680 A, 08.12.2005. | |||

