Изобретение относится к автомобилестроению, в частности, к способам и устройствам активной безопасности транспортных средств.
Известна система контроля и предотвращения дрифта колес автомобиля, содержащая датчики частот вращения колес автомобиля, электрически связанные с устройством обработки информации линиями связи сопряжения, микропроцессорное устройство обработки информации, включающее блок настроечных параметров оценки физических параметров датчиков вращения колес автомобиля, блок анализа, блок сравнения с критическими значениями физических параметров датчиков вращения колес автомобиля, блок формирования сигналов, характеризующих состояние и характер движения автомобиля, блок формирования управляющих воздействий на органы управления автомобилем (см. патент Великобритании GB 2545463 А, заявитель JAGUAR LAND ROVER LTD, опубл. 21.06.2017). Основным недостатком известной системы является обязательная сложная система определения и выработки управляющих воздействий.
Известна система контроля и предотвращения дрифта колес автомобиля, содержащая датчики частот вращения колес автомобиля, электрически связанные с устройством обработки информации линиями связи сопряжения, микропроцессорное устройство обработки информации, включающее блок настроечных параметров оценки физических параметров датчиков вращения колес автомобиля, блок анализа, блок сравнения с критическими значениями физических параметров датчиков вращения колес автомобиля, блок формирования сигналов, характеризующих состояние и характер движения автомобиля, блок формирования управляющих воздействий на органы управления автомобилем (см. патент США US 5275474 А, заявитель GENERAL MOTORS CORPORATION, опубл. 04.01.1994). Основным недостатком известной системы является сложное поэтапное сравнение контролируемых по дрифту колес и других параметров движения автомобиля.
Известна система контроля и предотвращения дрифта колес автомобиля, содержащая датчики частот вращения колес автомобиля, электрически связанные с устройством обработки информации линиями связи сопряжения, микропроцессорное устройство обработки информации, включающее блок настроечных параметров оценки физических параметров датчиков вращения колес автомобиля, блок анализа, блок сравнения с критическими значениями физических параметров датчиков вращения колес автомобиля, блок формирования сигналов, характеризующих состояние и характер движения автомобиля, блок формирования управляющих воздействий на органы управления автомобилем (см. патент США US 5704695 А, заявитель TOYOTA MOTOR СО LTD (TOYOTA JIDOSHA KABUSHIKI KAISHA), опубл. 06.01.1998). Основным недостатком известной системы является сложная система взаимно дублированная система управления автомобилем во время дрифта.
Известна система контроля и предотвращения дрифта колес автомобиля, содержащая датчики частот вращения колес автомобиля, электрически связанные с устройством обработки информации линиями связи сопряжения, микропроцессорное устройство обработки информации, включающее блок настроечных параметров оценки физических параметров датчиков вращения колес автомобиля, блок анализа, блок сравнения с критическими значениями физических параметров датчиков вращения колес автомобиля, блок формирования сигналов, характеризующих состояние и характер движения автомобиля, блок формирования управляющих воздействий на органы управления автомобилем (см. патент США US 6112147 А заявитель GENERAL MOTORS CORPORATION, опубл. 29.08.2000).
В состав системы входят датчики, необходимые для измерений угловой скорости вращения по отдельности каждого колеса и центра масс автомобиля, угла поворота рулевого колеса и акселерометры продольного и поперечного ускорений, а также устройства антиблокировочной системы с прерывистым режимом раздельного торможения колес правого и левого бортов.
К недостаткам данной системы относятся высокая стоимость конструкции измерительной и исполнительной частей системы.
Наиболее близким по технической сущности является способ предотвращения столкновений автомобиля с препятствиями и система для его осуществления (Патент РФ RU 2335805 С1, заявители Бузников Сергей Евгеньевич, Елкин Дмитрий Сергеевич, опубл. 10.10.2008). Недостатком данной системы является недостаточно широкий вектор измеряемых координат состояния автомобиля, и в частности, угловой скорости дрифта колес.
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в косвенных измерениях, прогнозировании и предотвращения дрифта колес автомобиля.
Поставленная техническая задача решается тем, что согласно предложенному изобретению система контроля и предотвращения дрифта колес автомобиля, содержащая датчики 1, 2, 3, 4 частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством 5 обработки информации посредством линий связи с устройством 6 сопряжения, микроконтроллерное устройство 5 обработки информации, включает блок 7 настроечных параметров оценки физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блок 8 анализа параметров датчиков 1, 2, 3, 4, блок 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4, вращения колес автомобиля, блок 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блок 11 формирования сигналов для управляющих воздействий на органы 12 управления автомобилем, для индикатора опасных состояний и для подачи на устройство вывода графической информации для водителя, причем в системе блоки 8 анализа, 9 сравнения, 10 формирования сигналов и 11 формирования сигналов для управляющих воздействий выполнены на базе микроконтроллерного устройства 5 с возможностью программного исполнения функций блока 8 анализа физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля, блока 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блока 11 формирования сигналов для управляющих воздействий на органы 12 управления автомобилем,
блок 7 настроечных параметров выполнен с возможностью оценки физических параметров датчиков 1, 2. 3, 4 вращения колес автомобиля и выявления неисправных датчиков, показания которых будут исключены из дальнейшего анализа,
при этом система дополнительно снабжена устройством 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров, а устройство 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров дополнительно снабжено блоком 17 оперативного ввода настроечной информации об опасных состояниях окружающей среды и блоком 18 индикации опасных состояний, выполненными с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту, а также блоком 19 выбора режима передачи информации в устройство графической информации водителя,
причем система снабжена блоком 20 анализа опасных состояний и выбора оптимального варианта и определения последовательности устранения опасных ситуаций и воздействия на органы 12 управления автомобиля на основании выполнения анализа в микроконтроллерном устройстве 5 обработки информации с исполнением в соответствии с заложенными в нем программами согласно исполнению функций блока 8 анализа физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля, блока 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блока 11 формирования сигналов для управляющих воздействий на органы 12 управления.
К числу преимуществ, то есть технических результатов, достигаемых предлагаемой системой контроля и предотвращения дрифта колес автомобиля следует отнести:
- возможность прогнозирования и предотвращения дрифта колес до возникновения этих событий, которая достигается путем экстраполяции опасных состояний, в частности, дрифта колес;
- низкая стоимость технических средств, обусловленная отсутствием дополнительных физических датчиков первичной информации, используемых для решения подобных задач в других системах;
- возможность функционирования в неполной конфигурации датчиков частот вращения колес, включая отказы одного или двух датчиков разных бортов автомобиля;
- пониженное энергопотребление, обусловленное отсутствием дополнительных датчиков информации;
- более высокая эксплуатационная надежность, обусловленная минимальной конфигурацией используемых технических средств, включая датчики первичной информации;
- возможность прогнозирования измеряемых физических переменных и их границ для использования данных в системе объективного контроля для их анализа и установления причин ДТП;
- возможность автоматического анализа опасных состояний и выбора оптимального варианта предотвращения дрифта колес автомобиля и воздействия на органы управления автомобиля.
Технический результат также состоит в выборе оптимальной последовательности автоматических воздействий на органы управления автомобиля при динамической стабилизации безопасной скорости автомобиля на виражах, за счет чего предотвращается снос передних и занос задних колес (дрифт) автомобиля.
Технический результат достигается за счет создания системы контроля и предотвращения дрифта колес автомобиля, в которой ее блоки связаны определенным образом.
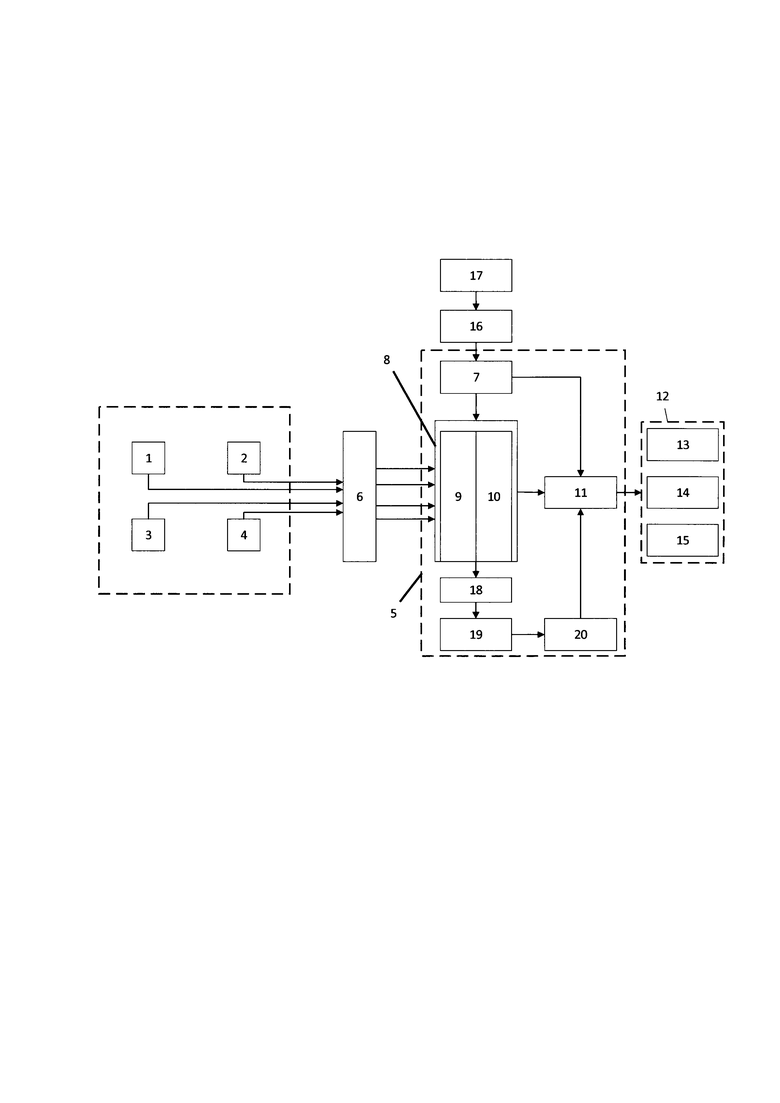
На чертеже показана блок-схема системы контроля и предотвращения дрифта колес автомобиля.
Система контроля и предотвращения дрифта колес автомобиля содержит (см. чертеж) датчики 1, 2, 3, 4 частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством 5 обработки информации посредством линий связи с устройством 6 сопряжения, микроконтроллерное устройство 5 обработки информации, включает блок 7 настроечных параметров оценки физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блок 8 анализа параметров датчиков 1, 2, 3, 4, блок 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блок 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блок 11 формирования сигналов для управляющих воздействий на органы 12 управления автомобилем, например такие как рулевое колесо 13, тормоза 14, акселератор 15, причем в системе блоки 8 анализа, 9 сравнения, 10 формирования сигналов и 11 формирования управляющих воздействий выполнены на базе микроконтроллерного устройства 5 с возможностью программного исполнения функций блока 8 анализа физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля, блока 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блока 11 формирования сигналов для управляющих воздействий на органы 12 управления автомобилем, блок 7 настроечных параметров выполнен с возможностью с оценки физических параметров датчиков 1, 2. 3, 4 вращения колес автомобиля и выявления неисправных датчиков, показания которых будут исключены из дальнейшего анализа, при этом система дополнительно снабжена устройством 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров, а устройство 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров дополнительно снабжено блоком 17 оперативного ввода настроечной информации об опасных состояниях окружающей среды и блоком 18 индикации опасных состояний, выполненными с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту автомобиля соответственно 1 или 2, 3 или 4, а также блоком 19 выбора режима передачи информации в устройство графической информации водителя, причем система снабжена блоком 20 анализа опасных состояний и выбора оптимального варианта и определения последовательности устранения опасных ситуаций и воздействия на органы 12 управления автомобиля на основании выполнения анализа в микроконтроллерном устройстве 5 обработки информации с исполнением в соответствии с заложенными в нем программами согласно исполнению функций блока 8 анализа физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля, блока 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блока 11 формирования сигналов для управляющих воздействий на органы 12 управления (см. чертеж).
Устройство графической информации водителя, служит для информирования водителя о приближении или наступлении опасных состояний и необходимых мерах для исключения предпосылок к аварийным ситуациям, но не является предметом данного предложения, так как выполнено из широко известных элементов, соединенных между собой по известным правилам с помощью известных средств.
Предложенная система работает следующим образом.
При движении автомобиля датчики 1, 2, 3, 4 вырабатывают сигналы о частоте вращения колес автомобиля, а так как они электрически связаны с микроконтроллерным устройством 5, то эти сигналы посредством линий связи с устройства 6 сопряжения постоянно поступают в микроконтроллерное устройство 5 обработки информации, которое включает динамически программируемый блок 7 настроечных параметров оценки физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, которое сравнивает их значения с рабочим диапазоном сигналов датчиков и выявляет датчики, у которых возникли неисправности в виде пропадания или искажения сигнала на ограниченном временном интервале. При этом автоматически показания такого датчика исключаются из дальнейшего анализа (см. чертеж).
Далее в микроконтроллерном устройстве 5 обработки информации программный блок 8 анализа параметров датчиков 1, 2, 3, 4 по установленной на нем программе сравнивает сигналы от датчиков 1, 2, 3, 4 частот вращения колес автомобиля, между собой и получает данные характеризующие состояние и характер движения автомобиля, так например, если датчики 1, 3 левого борта имеют пропорционально большие частоты вращения, чем частоты датчиков 2, 4 правого борта, то устанавливается, что автомобиль поворачивает направо, такое состояние определяется углом поворота управляемых колес, соответствующего углу поворота рулевого колеса 13. Например, если датчики 1, 3 левого борта имеют не пропорциональное изменение частот вращения, то устанавливается, что колеса передней и/или задней оси попадают в дрифт (см. чертеж).
На основании полученных сигналов микроконтроллерное устройство 5 обработки информации системы формирует по известным алгоритмам зависимостей между параметрами частот вращения колес, на основании их математической обработки и на основании настроечных параметров оценки физических параметров, характеризующих состояние автомобиля, в том числе оценки скорости центра масс, угла поворота управляемых колес, скоростей продольных скольжений колес, топовых значений коэффициентов трения скольжения колес, а также граничных скоростей сноса передних и заноса задних колес, граничных значений углов поворота управляемых колес, соответствующих сносу передних и заносу задних колес и оценки угловой скорости дрифта колес автомобиля. Очевидно, что указанные настроечные и расчетные параметры могут оперативно меняться в процессе движения автомобиля и их конкретные значения не могут быть предметом подробного анализа и разъяснения во всех возможных аспектах движения автомобиля на маршруте и по этой причине подробно не рассматриваются в данном предложении.
После этого выявленный сигнал опасного состояния поступает в программный блок 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, где происходит сравнение с критическими значениями физических параметров датчиков 1, 2, 3, 4, устанавливается вид дрифта, соответствующий сносу передних 1, 2 и/или заносу задних 3, 4 колес и по оценке угловой скорости дрифта колес автомобиля устанавливается степень опасности этого явления.
Далее программный блок 10 формирования сигналов, характеризующих состояние и характер движения автомобиля и программный блок 11 формируют сигналы для управляющих воздействий и команду на последовательность и интенсивность управляющих воздействий на органы 12 управления автомобилем, а также указанными блоками вырабатываются сигналы для индикатора опасных состояний и для подачи на устройство вывода графической информации для водителя.
Отличие конструктивных особенностей предложенной системы и их работы в сравнении с известными конструкциями описано ниже.
Если в системе блоки 8 анализа, 9 сравнения, 10 формирования сигналов и 11 формирования сигналов для управляющих воздействий выполнены на базе микроконтроллерного устройства 5 в виде программных блоков, работающих с возможностью программного исполнения функций блока 8 анализа физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля, блока 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блока 11 формирования сигналов для управляющих воздействий на органы 12 управления автомобилем, то такое выполнение позволяет значительно ускорить процессы анализа физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, сравнения их с критическими значениями физических параметров, правильно оценить опасность ситуации и оперативно сформировать последовательность управляющих воздействий на органы 12 управления автомобилем (см. чертеж).
Блок 7 настроечных параметров выполнен с возможностью с оценки физических параметров датчиков 1, 2. 3, 4 вращения колес автомобиля и выявления неисправных датчиков, показания которых будут исключены из дальнейшего анализа. Очевидно, это повысит отказоустойчивость системы.
При этом система дополнительно снабжена устройством 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров. Такое дополнение позволяет вводить дополнительные данные в блок 7 настроечных параметров, например при программировании системы адаптивного круиз контроля в соответствии с особенностями предполагаемого маршрута, например, с указанием, где расположены по маршруту движения опасные участки дороги, например такие как, крутые повороты или виражи с отрицательным уклоном, то есть виражи в которых уклон направлен не классически в сторону наименьшего внутреннего радиуса, а наоборот - в сторону большего внешнего радиуса. В Правилах Дорожного Движения нет предупредительного знака отрицательного уклона виража, а визуально его очень трудно определить. Снижение силы сцепления с дорожным полотном при таком вираже может быть значительным (см. чертеж).
Устройство 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров, дополнительно снабжено блоком 17 оперативного ввода настроечной информации об опасных состояниях, в том числе окружающей среды. Такое дополнение устройства 16 позволяет оперативно изменять настроечную информацию об опасных состояниях, при этом настройки могут меняться, например, при резком и/или внезапном изменении погодных или дорожных условий. Такими изменениями могут быть внезапно начавшийся дождь, снежный шквал, выезд на участок с новым жидким битумно-мастичным гравийным покрытием и т.п.(см. чертеж).
Снабжение устройства 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров дополнительно блоком 17 оперативного ввода настроечной информации об опасных состояниях и блоком 18 индикации опасных состояний, которые совместно выполнены с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту позволяет точно и правильно оценить характер движения автомобиля при минимуме информации, а также снабжение системы блоком 19 выбора режима передачи информации в устройство графической информации водителя позволяет выбрать необходимую информацию и правильно проинформировать водителя об возникающей опасной ситуации.
Снабжение системы блоком 20 анализа опасных состояний и выбора оптимального варианта и определения последовательности устранения опасных ситуаций и воздействия на органы 12 управления автомобиля на основании выполнения анализа в микроконтроллерном устройстве 5 обработки информации с исполнением в соответствии с заложенными в нем программами согласно исполнению функций блока 8 анализа физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля, блока 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блока 11 формирования сигналов для управляющих воздействий на органы 12 управления автомобилем позволяет эффективно оценить опасность ситуации и сформировать последовательность управляющих воздействий на органы 12 управления автомобилем, также эффективно выбрать оптимальный вариант предотвращения дрифта колес автомобиля и определить необходимую последовательность действий для устранения опасных ситуаций путем необходимого и достаточного воздействия на органы 12 управления автомобиля при относительно быстро меняющихся условиях окружающей среды, при которых выбирается оптимальная последовательность для процесса управления и воздействия на органы 12 управления автомобиля (см. чертеж).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля и предотвращения дополнительного рыскания колёс автомобиля | 2023 |
|
RU2812030C1 |
| Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2019 |
|
RU2725569C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ДРИФТА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2717121C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СНОСА И ЗАНОСА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2702878C1 |
| Способ определения угловой скорости дополнительного рыскания колёс автопоезда | 2023 |
|
RU2812026C1 |
| Система стабилизации безопасной скорости колесного транспортного средства | 2019 |
|
RU2744642C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
| Способ предотвращения опрокидывания автопоезда | 2023 |
|
RU2811998C1 |
Для предотвращения дрифта колес используется информация от датчиков частот вращения колес автомобиля и блока настроечных параметров с возможностью оперативного ввода настроечной информации об опасных состояниях окружающей среды. Обеспечивается прогнозирование и предотвращение дрифта колес автомобиля. 1 ил. 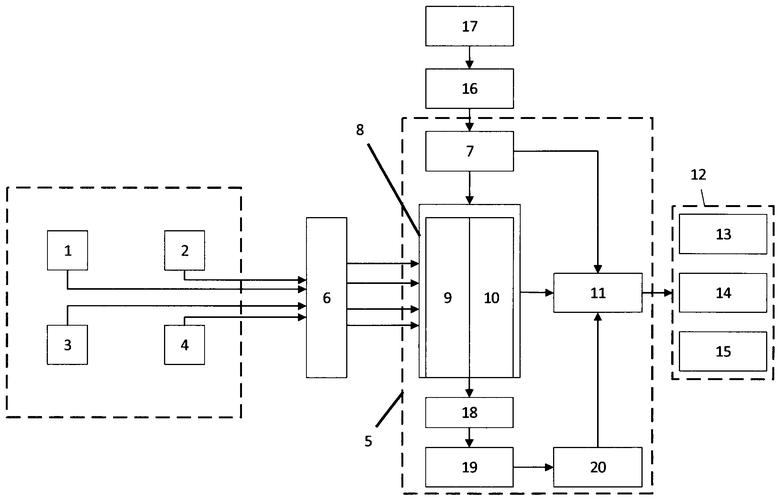
Система контроля и предотвращения дрифта колес автомобиля, содержащая датчики 1, 2, 3, 4 частот вращения колес автомобиля, электрически связанные с микроконтроллерным устройством 5 обработки информации посредством линий связи с устройством 6 сопряжения, микроконтроллерное устройство 5 обработки информации, включает
блок 7 настроечных параметров оценки физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля,
блок 8 анализа параметров датчиков 1, 2, 3, 4,
блок 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля,
блок 10 формирования сигналов, характеризующих состояние и характер движения автомобиля,
блок 11 формирования сигналов для управляющих воздействий на органы 12 управления автомобилем,
отличающаяся тем, что
в системе блоки 8 анализа, 9 сравнения, 10 формирования сигналов и 11 формирования сигналов для управляющих воздействий выполнены на базе микроконтроллерного устройства 5 с возможностью программного исполнения функций блока 8 анализа физических параметров датчиков 1, 2. 3, 4 вращения колес автомобиля, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля, блока 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блока 11 формирования сигналов для управляющих воздействий на органы 12 управления автомобилем,
блок 7 настроечных параметров выполнен с возможностью оценки физических параметров датчиков 1, 2. 3, 4 вращения колес автомобиля и выявления неисправных датчиков, показания которых будут исключены из дальнейшего анализа.
при этом система дополнительно снабжена устройством 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров,
а устройство 16 ввода, корректировки и отображения информации в блок 7 настроечных параметров дополнительно снабжено блоком 17 оперативного ввода настроечной информации об опасных состояниях окружающей среды и блоком 18 индикации опасных состояний, выполненными с возможностью определения опасных состояний, по меньшей мере, по сигналу от одного датчика частоты вращения колес по каждому борту,
а также блоком 19 выбора режима передачи информации в устройство графической информации водителя,
причем система снабжена блоком 20 анализа опасных состояний и выбора оптимального варианта и определения последовательности устранения опасных ситуаций и воздействия на органы 12 управления автомобиля на основании выполнения анализа в микроконтроллерном устройстве 5 обработки информации с исполнением в соответствии с заложенными в нем программами согласно исполнению функций блока 8 анализа физических параметров датчиков 1, 2, 3, 4 вращения колес автомобиля, блока 9 сравнения с критическими значениями физических параметров датчиков 1, 2, 3 и 4 частот вращения колес автомобиля, блока 10 формирования сигналов, характеризующих состояние и характер движения автомобиля, блока 11 формирования сигналов для управляющих воздействий на органы 12 управления.
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
| KR 1020120063375 A, 15.06.2012 | |||
| US 6131688 A, 17.10.2000. | |||

