Изобретение относится к области артиллерийских систем, установленных на транспортном средстве. Артиллерийские системы этого типа предусматривают самозащиту транспортных средств, преимущественно танков.
Прототипом изобретения является система самообороны транспортного средства, зарегистрированная в Государственном реестре изобретений, №2204108 от 10 мая 2003 г. [1].
Согласно этому прототипу система самообороны содержит радиолокационную станцию обнаружения и измерения траекторных параметров атакующего средства, блок прогнозирования входа атакующего средства в зону поражения системы, блок выбора защитного боеприпаса и выдачи команд на его отстрел и подрыв, комплект защитных боеприпасов, формирующих круговую оборону. Каждый боеприпас размещен в пусковой шахте, а сами пусковые шахты расположены вокруг башни танка.
Как следует из описания работы рассматриваемой системы самообороны, радиолокационная станция производит измерение дальности, угла места, азимута и доплеровской составляющей вектора скорости.
При этом блок памяти изменяет задержку генератора модулирующего сигнала путем подачи сигнала номера расчетной зоны обнаружения атакующего средства. Однако в связи с тем, что тип атакующего средства априори неизвестен, в радиолокационной станции установлена максимальная дальность обнаружения, соответствующая атакующим средствам с максимальной скоростью. Для целей с меньшими скоростями дальность обнаружения можно уменьшить пропорционально скорости, что позволит обеспечить работу комплекса на меньших дальностях, например, по атакующим средствам с меньшей дальностью пуска, чем дальность до зоны обнаружения атакующего средства, имеющего максимальную скорость, или при экранировании этой зоны.
Задача, решаемая изобретением, - изменение дальности обнаружения атакующих средств в режиме обнаружения.
Техническим решением задачи является то, что в системе самообороны транспортного средства, содержащей радиолокационную станцию (РЛС) обнаружения и измерения траекторных параметров атакующего средства, приемные каналы которой снабжены блоком разделения сигналов доплеровских частот и выбора сигнала с более высокой доплеровской частотой, блок памяти, блок формирования сигнала дальности атакующего средства, блок прогнозирования входа атакующего средства в зону поражения системы и пусковое устройство, в котором каждый боеприпас расположен на верхних частях транспортного средства с возможностью формирования круговой обороны и содержит метательный заряд и антиснаряд, дополнительно введен блок управления режимом обнаружения атакующего средства, связанный в режиме обнаружения с блоком формирования сигнала дальности атакующего средства и с блоком памяти, осуществляющий поочередное переключение номеров расчетной обнаружения атакующего средства с задержкой, достаточной для обнаружения атакующих средств.
Сущность предлагаемой системы состоит в том, что время нахождения атакующего средства с максимальной скоростью в зоне обнаружения, соответствующей установленной в блоке памяти задержке, делится между К зонами обнаружения, соответствующими меньшим скоростям атакующего средства. Деление времени между n зонами обнаружения выбирается таким образом, чтобы не было пропуска атакующего средства с большей скоростью при установке зоны обнаружения для атакующего средства с меньшей скоростью. Действительно, если ширину зоны обнаружения обозначить L, то время нахождения в этой зоне атакующего средства с максимальной скоростью составит

где Vmax - максимальная скорость атакующего средства. Примем, что для обнаружения атакующего средства достаточно принять n периодов доплеровской частоты. Время, необходимое для обнаружения атакующего средства с максимальной скоростью, в этом случае составит

при этом время, равное (Т-Тобн), можно использовать для поиска атакующих средств с меньшими скоростями полета, меняя при этом последовательно задержку в блоке памяти в К зонах обнаружения, число которых определяется из решения уравнения

где λ-длина волны РЛС, i - номер зоны обнаружения.
При этом скорость атакующего средства для i-й зоны обнаружения определяется как:

где Vmin - минимальная скорость атакующего средства.
Так, например, при λ=3 см, а L=3 м при разных значения n получим зависимость К от n, представленную на фиг.1.
Таким образом, система производит переключение зон обнаружения и их удержание на время обработки принимаемого сигнала атакующего средства до выдачи сигнала дальности, то есть на время принятия решения о захвате сигнала атакующего средства, без пропуска атакующих средств с любой скоростью полета в заданном диапазоне.
Изобретение поясняется фиг.2.
На фиг.2 показана функциональная схема РЛС с управляемым режимом обнаружения. На фиг.2 обозначено:
1 - модулятор сигнала передатчика,
2 - усилитель мощности,
3 - задающий генератор,
4 - преобразователь частоты,
5 - модулятор,
6 - блок памяти,
6а - блок управления режимом обнаружения,
7 - генератор модулирующего сигнала,
8 - умножитель частоты,
9 - задающий генератор,
10 - делитель мощности,
11 - генератор модулирующего сигнала с задержкой,
12 - преобразователь частоты опорного канала,
13, 18 - фильтры предварительной фильтрации,
14, 19 - усилители,
15, 20 - преобразователи частоты,
16, 21 - полосовые усилители,
17 - преобразователь частоты измерительного канала,
22 - задающий генератор,
23 - преобразователь частоты,
24 - делитель мощности,
25 - блок разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой,
26 - формирователь сигнала дальности,
27 - устройство определения обобщенных координат,
28 - измеритель разности фаз,
29 - схема сравнения,
30 - регистр хранения предыдущей координаты,
31 - вычислитель,
32 - измеритель частоты Доплера,
33 - устройство определения номера боеприпаса,
34 - счетчик времени выдачи команды на отстрел боеприпаса,
35, 38 - ключи,
36 - задающий генератор,
37 - счетчик времени выдачи команды на подрыв боеприпаса.
Сигнал несущей частоты с задающего генератора 3 через усилитель мощности 2 поступает на модулятор сигнала передатчика 1. Этот модулятор 1 модулирует сигнал несущей частоты сигналом, поступающим с генератора модулирующего сигнала 7. Выходной сигнал модулятора сигнала передатчика 1 через антенну А1 излучается в открытое пространство. В то же самое время сигнал, полученный с генератора модулирующего сигнала 7, поступает на модулятор сигнала передатчика 1 и на генератор модулирующего сигнала 11 с задержкой, величина этой задержки изменяется путем подачи сигнала номера расчетной зоны обнаружения атакующего средства с блока памяти 6 на вход вышеуказанного генератора. Модулирующий задержанный сигнал поступает на формирователь сигнала первого гетеродина. Формирователь сигнала первого гетеродина содержит преобразователь частоты 4, модулятор 5 и делитель мощности 10. Сигнал несущей частоты с задающего генератора 3 подается на первый вход преобразователя частоты 4, а на второй вход поступает сигнал первой промежуточной частоты с задающего генератора 9, выходной сигнал с преобразователя частоты поступает на первый вход модулятора 5, на второй вход которого поступает модулирующий задержанный сигнал. Сигнал первого гетеродина поступает с выхода модулятора 5 через делитель мощности 10 на первые преобразователи частоты 12, 17 опорного и измерительного каналов соответственно.
Как опорный, так и измерительный каналы РЛС имеют одинаковые составные части.
Работа опорного канала происходит следующим образом. Сигнал с приемной антенны А2 поступает на первый вход преобразователя частоты 12, а на его второй вход поступает сигнал с делителя 10 первого гетеродина. С выхода преобразователя частоты 12 сигнал частотой, равной разности значений промежуточной частоты и частоты Доплера атакующего средства и «антипода», поступает на фильтр 13 предварительной фильтрации сигналов, отраженных от атакующего средства.
С выхода фильтра 13 сигнал поступает на усилитель 14, а с выхода последнего - на первый вход преобразователя частоты 15, на второй вход которого подается сигнал со второго гетеродина. Одновременно с этим сигнал с выхода фильтра 13 поступает на первый вход преобразователя частоты 23, на второй вход которого приходит сигнал первой промежуточной частоты с задающего генератора 9, на третий вход преобразователя 23 подается сигнал задающего генератора 22. Сигнал доплеровской частоты с первого выхода преобразователя частоты 23, содержащий информацию о скорости атакующего средства и «антипода», поступает на блок разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой 25, с выхода которого сигналы поступают на блоки 23, 26 и 32. С блока 26 сигнал поступает на блок 6а и блок 27. В режиме ожидания атакующего снаряда сигналы с блока 6а поступают на вход блока 6, который по этим командам переключает поочередно номера расчетной зоны обнаружения атакующего средства, после прихода команды с блока 26 блок 6а отключается и работа системы происходит по командам блока 6, но с того номера расчетной зоны обнаружения, в котором был получен сигнал с блока 26. Работа блоков 26...38 аналогична работе блоков прототипа [1].
Система самообороны работает следующим образом.
В режиме ожидания появления атакующих средств происходит поочередное переключение номеров расчетной зоны обнаружения атакующего средства в интервале дальностей, соответствующих заданному диапазону скоростей атакующих средств.
При попадании атакующего средства в зону действия РЛС его сопровождение начинается с того номера расчетной зоны обнаружения, в которой он был обнаружен. С выхода РЛС информация поступает в блок прогнозирования входа атакующего средства в зону поражения системы. Блок прогнозирования анализирует полученные сигналы и переводит РЛС в режим измерения. Информация о параметрах атакующего средства (дальность, скорость, азимут, угол места) снова подается в блок прогнозирования. В процессе измерения блок прогнозирования управляет работой радиолокационной станции и по данным, полученным в процессе измерения, рассчитывает точку попадания атакующего средства в зону поражения системы.
Эффективность и работоспособность заявленной системы подтверждена математическим моделированием системы самообороны в целом.
Литература
1. Патент №2204108 от 10.05.2003. Система обороны транспортного средства. / Общевойсковая академия ВС РФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2204108C1 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2286529C2 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2102678C1 |
| Способ формирования команды на пуск защитного боеприпаса | 2021 |
|
RU2783662C1 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА "РАНОВИТ" | 2004 |
|
RU2257531C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| Способ активной защиты объекта со стороны верхней полусферы от множественных атак БПЛА | 2022 |
|
RU2784092C1 |
| СПОСОБ И СИСТЕМА ЗАЩИТЫ ВОЗДУШНОГО СУДНА ОТ УПРАВЛЯЕМЫХ РАКЕТ С ОПТИЧЕСКИМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 2019 |
|
RU2726351C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ОТВЕТНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2021 |
|
RU2771356C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |

Изобретение относится к системам самообороны транспортного средства. Система содержит радиолокационную станцию обнаружения, приемные каналы которой снабжены блоком разделения доплеровских частот, и боеприпасы. Каждый боеприпас имеет метательный заряд и антиснаряд. Система снабжена блоком управления режимом обнаружения атакующего средства, связанным в режиме обнаружения с блоком формирования сигнала дальности атакующего средства. Техническим результатом является изменение дальности обнаружения атакующих средств в режиме обнаружения. 2 ил.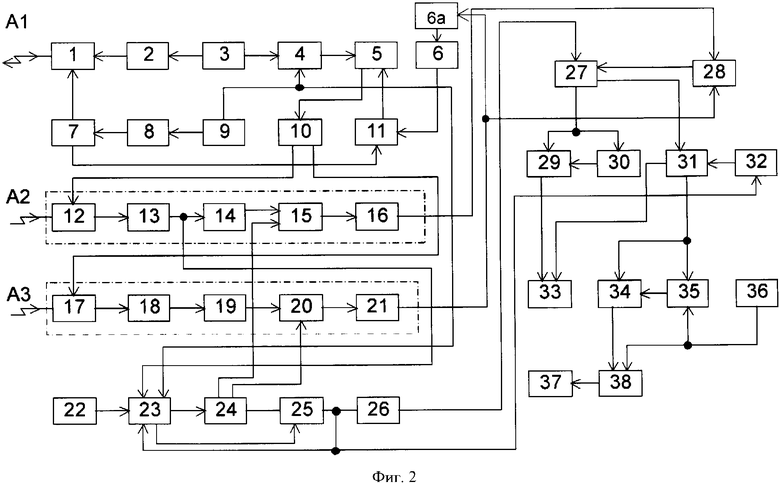
Система самообороны транспортного средства, содержащая радиолокационную станцию (РЛС) обнаружения и измерения траекторных параметров атакующего средства, приемные каналы которой снабжены блоком разделения сигналов допплеровских частот и выбора сигнала с более высокой допплеровской частотой, блок памяти, блок формирования сигнала дальности атакующего средства, блок прогнозирования входа атакующего средства в зону поражения системы и пусковое устройство, в котором каждый боеприпас расположен на верхних частях транспортного средства с возможностью формирования круговой обороны и содержит метательный заряд и антиснаряд, отличающаяся тем, что она снабжена блоком управления режимом обнаружения атакующего средства, связанным в режиме обнаружения с блоком формирования сигнала дальности атакующего средства и с блоком памяти, осуществляющим поочередное переключение номеров расчетной зоны обнаружения атакующего средства с задержкой, достаточной для обнаружения атакующих средств.
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2204108C1 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2102678C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОЛЕЗВИЙНЫХ РЕЖУЩИХ ИНСТРУМЕНТОВ | 2006 |
|
RU2306208C1 |
| СОЕДИНИТЕЛЬНЫЙ УЗЕЛ ЦЕПИ | 2015 |
|
RU2695467C1 |

