Изобретение относится к области артиллерийских систем, установленных на транспортном средстве. Артиллерийские системы этого типа предусматривают самозащиту транспортных средств, преимущественно танков.
Прототипами изобретения является система самообороны транспортного средства, зарегистрированная в Государственном реестре изобретений №2204108 от 10 мая 2003 г. [1].
Согласно этому прототипу система самообороны содержит радиолокационную станцию обнаружения и измерения траекторных параметров атакующего средства, блок прогнозирования входа атакующего средства в зону поражения системы, блок выбора защитного боеприпаса и выдачи команд на его отстрел и подрыв, комплект защитных боеприпасов, формирующих круговую оборону. Каждый боеприпас размещен в пусковой шахте, а сами пусковые шахты расположены вокруг башни танка. Для снижения влияния переотражений подстилающей поверхности на точность измерения траекторных параметров приемные каналы радиолокационной станции содержат блок разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой. Для выделения сигнала с более высокой доплеровской частотой используются полосовые фильтры.
Задача, решаемая изобретением, - ограничение числа полосовых фильтров в блоке выделения составляющей сигнала с более высокой доплеровской частотой в широком диапазоне скоростей атакующего снаряда.
Техническим решением задачи является ведение в блок разделения доплеровских частот от атакующего средства и "антипода" и выбора сигнала с более высокой доплеровской частотой ограниченного числа полосовых фильтров перестраиваемых по частоте и полосе пропускания.
При этом система самообороны транспортного средства, например танка, содержит радиолокационную станцию обнаружения и измерения траекторных параметров атакующего средства, приемные каналы которой снабжены блоком разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой, и боеприпасы, расположенные на верхних частях этого транспортного средства и формирующие круговую оборону; каждый боеприпас размещен в пусковом устройстве и имеет метательный заряд и антиснаряд.
Сущность предлагаемой системы состоит в том, что доплеровские частоты сигналов, отраженных от атакующего средства и переотраженных от земной поверхности, всегда отличаются друг от друга, причем чем ближе подлетает атакующий снаряд к защищаемому объекту, тем больше они отличаются друг от друга. Это отличие может составлять единицы килогерц для системы самообороны, имеющей небольшое время реакции защитного боеприпаса, какое обеспечивается в указанном выше прототипе. Такое отличие доплеровских частот сигналов, отраженных от атакующего средства и переотраженных от земной поверхности, позволяет использовать частотное разделение этих сигналов в приемных каналах с помощью полосовых фильтров. Причем так как частота Доплера от атакующего средства всегда больше, чем аналогичная частота "антипода", то в приемных каналах должны выделяться сигналы атакующего средства с более высокой доплеровской частотой, что и позволяет снизить влияние подстилающей поверхности на точностные характеристики РЛС и тем самым повысить вероятность поражения атакующих средств. Так как система самообороны транспортного средства должна работать в широком диапазоне скоростей возможных атакующих средств, то ее доплеровские фильтры должны быть широкополосными. При этом для целей с малой скоростью разность доплеровских сигналов цели и ее "антипода" сравнительно небольшая, порядка двух десятков герц, а для целей с большой скоростью эта разность составляет сотни герц. Поэтому для их разделения требуются полосовые фильтры с полосой пропускания не менее этой разности доплеровских частот, что в пределах возможных доплеровских частот набор требуемых полосовых фильтров составит величину до тысячи фильтров.
При этом для выбора верхней частоты требуется не более 5-6 фильтров даже с учетом возможной ошибки измерения скорости Доплера. Для сокращения количества фильтров до 5-6 необходимо измерить частоту Доплера входного сигнала и в соответствии с измеренной частотой сформировать код управления полосовыми фильтрами, изменяющий их центральные частоты и полосы пропускания. Так как полосовые фильтры стоят рядом друг с другом, то полоса пропускания у них может быть одинаковой, а центральные частоты соседних полосовых фильтров могут отличаться на заранее известное минимальное значение разности доплеровских частот цели и "антипода".
Изобретение поясняется фиг.1 и фиг.2.
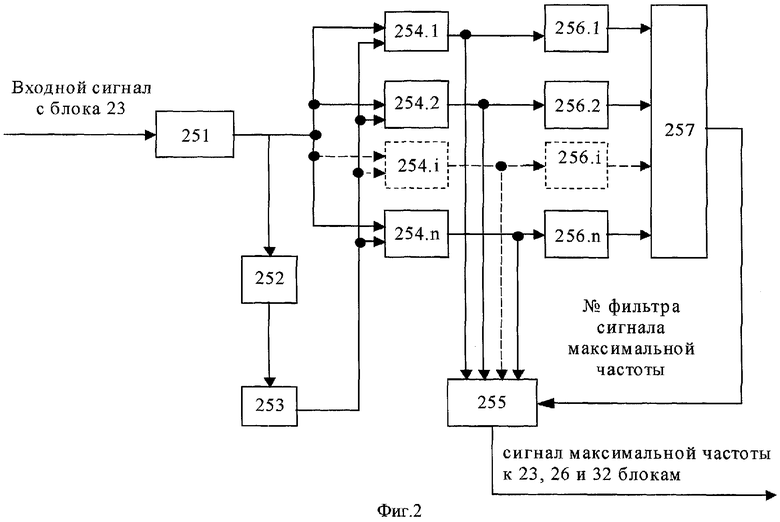
На фиг.1 - функциональная схема РЛС с исключением отраженных от земной поверхности сигналов.
На фиг.2 - функциональная схема блока разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой.
На фиг.1 обозначено:
1 - модулятор сигнала передатчика,
2 - усилитель мощности,
3 - задающий генератор,
4 - содержит преобразователь частоты,
5 - модулятор,
6 - блок памяти,
7 - генератор модулирующего сигнала,
8 - умножитель частоты,
9 - задающий генератор,
10 - делитель мощности,
11 - генератор модулирующего сигнала с задержкой,
12 - преобразователь частоты опорного канала,
13, 18 - фильтры предварительной фильтрации,
14, 19 - усилители,
15, 20 - преобразователи частоты,
16, 21 - полосовые усилители,
17 - преобразователь частоты измерительного канала,
22 - задающий генератор,
23 - преобразователь частоты,
24 - делитель мощности,
25 - блок разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой,
26 - формирователь сигнала дальности,
27 - устройство определения обобщенных координат,
28 - измеритель разности фаз,
29 - схема сравнения,
30 - регистр хранения предыдущей координаты,
31 - вычислитель,
32 - измеритель частоты Доплера,
33 - устройство определения номера боеприпаса,
34 - счетчик времени выдачи команды на отстрел боеприпаса,
35, 38 - ключи,
36 - задающий генератор,
37 - счетчик времени выдачи команды на подрыв боеприпаса.
На фиг.2 обозначено:
251 - усилитель доплеровских частот,
252 - измеритель доплеровской частоты,
253 - формирователь кода доплеровской частоты,
254.1...254.n - полосовые фильтры,
255 - аналоговый мультиплексор,
256.1....256.n - система амплитудных детекторов,
257 - формирователь кода номера полосового фильтра.
Сигнал несущей частоты с задающего генератора 3 через усилитель мощности 2 поступает на модулятор сигнала передатчика 1. Этот модулятор 1 модулирует сигнал несущей частоты сигналом, поступающим с генератора модулирующего сигнала 7. Выходной сигнал модулятора сигнала передатчика 1 через антенну А1 излучается в открытое пространство. В то же самое время сигнал, полученный с генератора модулирующего сигнала 7, поступает на модулятор сигнала передатчика 1 и на генератор модулирующего сигнала 11 с задержкой, величина этой задержки изменяется путем подачи сигнала номера расчетной зоны обнаружения атакующего средства с блока памяти 6 на вход вышеуказанного генератора. Модулирующий задержанный сигнал поступает на формирователь сигнала первого гетеродина. Формирователь сигнала первого гетеродина содержит преобразователь частоты 4, модулятор 5 и делитель мощности 10. Сигнал несущей частоты с задающего генератора 3 подается на первый вход преобразователя частоты 4, а на второй вход поступает сигнал первой промежуточной частоты с задающего генератора 9, выходной сигнал с преобразователя частоты поступает на первый вход модулятора 5, на второй вход которого поступает модулирующий задержанный сигнал. Сигнал первого гетеродина поступает с выхода модулятора 5 через делитель мощности 10 на первые преобразователи частоты 12, 17 опорного и измерительного каналов соответственно.
Как опорный, так и измерительный каналы РЛС имеют одинаковые составные части.
Работа опорного канала происходит следующим образом. Сигнал с приемной антенны А2 поступает на первый вход преобразователя частоты 12, а на его второй вход поступает сигнал с делителя 10 первого гетеродина. С выхода преобразователя частоты 12 сигнал частотой, равной разности значений промежуточной частоты и частоты Доплера атакующего средства и "антипода", поступает на фильтр 13 предварительной фильтрации сигналов, отраженных от атакующего средства.
С выхода фильтра 13 сигнал поступает на усилитель 14, а с выхода последнего на первый вход преобразователя частоты 15, на второй вход которого подается сигнал со второго гетеродина. Одновременно с этим сигнал с выхода фильтра 13 поступает на первый вход преобразователя частоты 23, на второй вход которого приходит сигнал первой промежуточной частоты с задающего генератора 9, на третий вход преобразователя 23 подается сигнал задающего генератора 22. Сигнал доплеровской частоты с первого выхода преобразователя частоты 23, содержащий информацию о скорости атакующего средства и "антипода", поступает на блок разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой 25.
Блок 25 работает следующим образом.
Входной сигнал усиливается усилителем доплеровских частот 251 и поступает на измеритель доплеровской частоты 252 и систему полосовых фильтров 254.1...254.n, полосы пропускания и центральные частоты которых перестраиваются кодом, сформированным блоком 253, в зависимости от измеренной блоком 252 частоты Доплера. Сигналы с выхода полосовых фильтров поступают на аналоговый мультиплексор 255 и систему амплитудных детекторов 256.1...256.n. Амплитуды сигналов с амплитудных детекторов сравниваются между собой в блоке 257, который формирует код, соответствующий номеру полосового фильтра, с выхода которого поступает на блок 257 составляющая сигнала с максимальной частотой. Этот код управляет мультиплексором 255, с выхода которого на блоки 23, 26 и 32 поступает частотная составляющая отраженного от цели сигнала, имеющая максимальную частоту Доплера. Работа блоков 26...38 аналогична работе блоков прототипа [1].
Система самообороны работает следующим образом.
При попадании атакующего средства в зону действия РЛС сигнал с ее входа поступает в блок прогнозирования входа атакующего средства в зону поражения системы. Блок прогнозирования анализирует полученные сигналы и переводит РЛС в режим измерения. Информация о параметрах атакующего средства (дальность, скорость, азимут, угол места) снова подается в блок прогнозирования. Для уменьшения влияния подстилающей поверхности в приемные каналы вводятся блоки и устройства разделения сигналов атакующего снаряда и "антипода". В процессе измерения блок прогнозирования управляет работой радиолокационной станции и по данным, полученным в процессе измерения, рассчитывает точку попадания атакующего средства в зону поражения системы.
Эффективность и работоспособность заявленной системы подтверждена математическим моделированием системы самообороны в целом.
Литература
1. Патент №2204108 от 10.05.2003. Система обороны транспортного средства. / Общевойсковая академия ВС РФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2204108C1 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2336485C2 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2102678C1 |
| РАДИОДАТЧИК | 1994 |
|
RU2087922C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОГО СИГНАЛА СЦЕНЫ | 2014 |
|
RU2549884C1 |
| Способ формирования команды на пуск защитного боеприпаса | 2021 |
|
RU2783662C1 |
| Моноимпульсный пеленгатор с комбинированным антенным устройством | 2015 |
|
RU2624008C2 |
| АВТОНОМНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ВОЗДУШНОЙ ЦЕЛИ | 2013 |
|
RU2533659C1 |
| ИМИТАТОР СИГНАЛА РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2012 |
|
RU2522502C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ОТВЕТНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫМ СТАНЦИЯМ | 2002 |
|
RU2237372C2 |
Изобретение относится к системам самообороны транспортного средства. Сущность изобретения заключается в том, что блоки разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой радиолокационной станции содержат перестраиваемые по полосе пропускания доплеровские фильтры, управление которыми осуществляется командой, вырабатываемой измерителем доплеровской частоты. Реализация изобретения позволяет уменьшить количество полосовых фильтров, используемых для выделения сигнала с более высокой доплеровской частотой. 2 ил.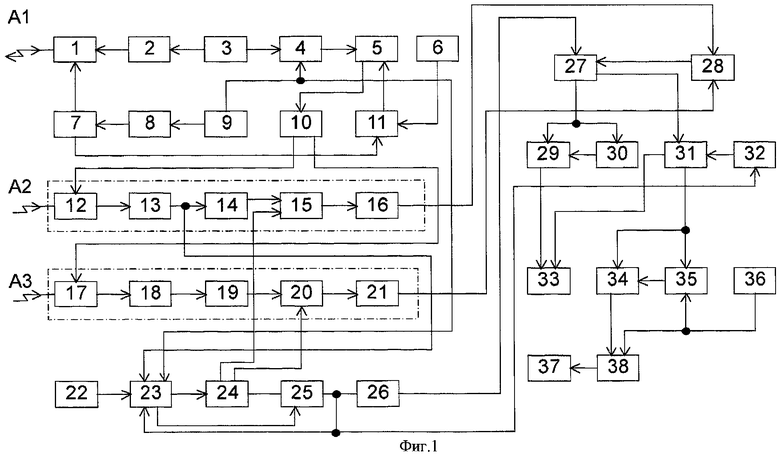
Система самообороны транспортного средства, содержащая радиолокационную станцию обнаружения, приемные каналы которой снабжены блоком разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой, и измерения траекторных параметров атакующего средства, и боеприпасы, расположенные на верхних частях этого транспортного средства и формирующие круговую оборону, при этом каждый боеприпас размещен в пусковом устройстве и имеет метательный заряд и антиснаряд, отличающаяся тем, что блоки разделения доплеровских частот и выбора сигнала с более высокой доплеровской частотой радиолокационной станции содержат перестраиваемые по полосе пропускания доплеровские фильтры, управление которыми осуществляется по величине доплеровской частоты, вырабатываемой измерителем доплеровской частоты.
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2204108C1 |
| СИСТЕМА САМООБОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2102678C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ МНОГОЛЕЗВИЙНЫХ РЕЖУЩИХ ИНСТРУМЕНТОВ | 2006 |
|
RU2306208C1 |
| СОЕДИНИТЕЛЬНЫЙ УЗЕЛ ЦЕПИ | 2015 |
|
RU2695467C1 |
| DE 3410467 А1, 26.09.1985. | |||

