Изобретение относится к области вертолетостроения, а именно, к способам статической и динамической регулировки соконусности лопастей несущих винтов вертолетов и может быть использовано для проведения работ по регулировке лопастей несущих винтов вертолетов, находящихся как на предприятиях промышленности, так и в эксплуатирующих организациях.
Предлагаемый способ может быть реализован на вертолетах и летательных аппаратах соосной, одновинтовой, многовинтовой схем, на которые устанавливают лопасти, имеющие секции с триммерными пластинами.
Известны способы решения проблемы вибрации методом балансировки несущей системы или с помощью установки дополнительного оборудования для гашения вибрации.
Известен способ статической балансировки лопастей воздушных винтов (RU 2336508 C1, G01M 1/12, публ. 28.04.2007), относящийся к коррекции статических моментов лопастей воздушных винтов, являющихся вращающейся несущей поверхностью, который может быть использован для балансировки лопастей несущих и рулевых винтов вертолетов в процессе их изготовления. Способ заключается в приведении фактических значений статических моментов лопасти к предварительно заданным параметрам как по хорде, так и по размаху лопасти посредством взвешивания ее в трех точках на несущей поверхности. В двух точках на конце лопасти и одной точке на комле целенаправленно добавляют либо удаляют дополнительные грузы в отсеках балансировки лопасти. Вес грузов определяют с помощью микропроцессора, запрограммированного на вычисление величин коррекции общей массы и координат центров тяжести лопасти в продольном и поперечном направлениях по фактическим весовым данным в точках взвешивания. После изменения веса лопасти приведенные значения статических моментов лопасти окончательно приводят к предварительно заданным параметрам за счет обработки стыковочных отверстий на комле лопасти.
Известна лопасть винтов вертолетов со статическими и динамическими балансировочными грузами (FR 2781196 A1, В64С 27/00, В64С 27/46, публ. 21.01.2000), в которой балансировочное устройство лопасти несущего винта содержит статический балансировочный груз, разделенный на массы в двух корпусах по размаху лопасти. Динамические балансировочные грузы разделены на массы в двух корпусах, чтобы обеспечить динамическую регулировку лопасти при сохранении прежнего статического баланса. При этом балансиры вводятся в корпуса и извлекаются из них через единственное отверстие, симметричное относительно оси центрирования шага лопастей во внутреннем торце корпусов.
Известна система и способ регулировки вибрации несущего винта вертолета, наиболее близкие к заявляемому изобретению (CN 112173092 А, В64С 27/00, публ. 05.01.2021), в которой центральная часть втулки несущего винта установлена на валу несущего винта, автомат перекоса неподвижно соединен с нижней частью центральной части втулки воздушного винта, множество поддерживающих рычагов установки равномерно распределены по периферии центральной части втулки воздушного винта, и каждый поддерживающий рычаг установки соединен с одним поддерживающим рычагом лопасти несущего винта. Способ заключается в том, что датчик вибрации устанавливают на центральной части втулки несущего винта, блок управления принимает вибросигнал и выдает команду на регулировку рабочего перемещения управляемой тяги переменного шага после расчета, а тяга регулирует перемещение рукава лопасти несущего винта в соответствии с инструкцией, чтобы изменить подъемную силу лопасти воздушного винта в рукаве втулки и отрегулировать вибрацию.
Недостатками известных способов является то, что все эти методы не дают стабильный результат по снижению вибраций, даже при условии применения дорогостоящего дополнительного оборудования или установки электроники.
Известно, что статическая и динамическая регулировка несущей системы органов управления вертолетов производится в эксплуатирующих организациях по технологическим картам с использованием специальных (штатных, поставляемых с вертолетом) приспособлений и инструментов.
Статическая регулировка несущей системы применяется к узлам колонки несущих винтов (далее - КНВ) со снятыми лопастями, после которой проводится установка лопастей на КНВ с последующей динамической регулировкой несущего винта (далее - НВ) с наземным запуском вертолета.
Динамическая регулировка является завершающим этапом регулировки несущей системы вертолета и состоит из следующих операций:
- регулировки соконусности лопастей несущих винтов, состоящей из регулировки «разбежки», расстояния между лопастями в конусе несущего винта, и «перебежки», изменения взаимного расположения лопастей при изменении частоты вращения винтов при наземных гонках;
- весовой балансировки несущих винтов;
- регулировки системы «шаг - газ» с несущими винтами;
- устранения разворота на режиме висения;
- облета вертолета.
Для выполнения динамической регулировки несущей системы вертолетов требуется большое количество запусков вертолета с регулировкой длин тяг динамической регулировки и подбором углов отгиба триммерных пластин: не менее 4-6 наземных гонок на режимах «малый газ» и «автоматический»; 2-4 полета на режиме «висение». При таком объеме необходимых гонок и полетов процесс динамической регулировки несущих винтов требует больших затрат времени, при этом при выполнении работ должны быть соответствующие погодные условия (без осадков, ветер не более 5 м/с), из-за влияния которых работы могут переноситься до улучшения погодных условий, что увеличивает итоговую продолжительность и трудоемкость работ.
Как показала практика, при применении лопасти большой длины (более 5 м) не всегда возможно устранить вибрацию вертолета в полете, даже при хорошей предварительной регулировке соконусности и подборе балансировочных грузов.
Основными причинами возникновения вибраций вертолета являются несбалансированный несущий винт и несоконусность лопастей несущего винта в полете. Несоконусность лопастей несущего винта в полете зависит от точности изготовления лопастей. При изготовлении лопастей на производстве могут возникать отклонения поверхности хвостовых секции лопастей от заданного теоретического контура лопасти, отклонения линии задней кромки одной секции относительно линии задних кромок соседних секций. Отклонения по крутке лопастей приводят к тому, что лопасти в полете могут изменять свою траекторию в конусе несущего винта относительно друг друга, иными словами, возникает «перебежка» лопастей в конусе несущего винта. «Перебежку» устраняют регулировкой триммерных пластин лопасти. От правильного определения величины (угла) отгиба триммерных пластин зависит устранение вибраций вертолета.
Погрешности и отклонения, которые допускаются при изготовлении лопастей несущей системы и положения задней кромки, триммерных пластин лопастей при эксплуатации, могут оказывать большое влияние на вибрацию вертолета.
При изготовлении лопастей на производстве могут возникать отклонения поверхности хвостовых секции лопастей от заданного теоретического контура лопасти, отклонения линии задней кромки одной секции относительно линии задних кромок соседних секций, так называемые «ножницы», отклонения по крутке лопасти. Отклонения в допустимых пределах от теоретического контура, заданного в конструкторской документации, являются индивидуальной особенностью каждой лопасти и влияют на вибрации вертолета в полете.
В заявленном способе статической регулировки лопастей предлагается иной подход, который позволяет уменьшить уровень вибрации вертолета, путем математического анализа отклонений линии задней кромки лопасти. При этом величины отклонений линии задней кромки можно получить простым измерением при помощи штатного приспособления для замера отгиба триммеров, и определить значения отгиба триммерных пластин расчетным способом до проведения работ по динамической регулировке несущего винта.
Техническая проблема, решаемая в заявляемом изобретении, заключается в снижении уровня вибраций вертолета за счет более точной регулировки и улучшения соконусности лопастей несущего винта в полете, в повышении надежности и увеличении ресурса вертолета, а также уменьшении затрат на проведение работ по регулировке вертолета за счет снижения трудоемкости выполняемых работ.
Технический результат, получаемый при реализации изобретения, заключается в снижении вибраций вертолета на разных скоростных режимах полета и, как следствие, увеличении скоростных параметров вертолета.
Для достижения технического результата предлагается внедрить способ статической регулировки соконусности лопастей несущего винта вертолета, характеризующийся тем, что
измеряют отклонение задней кромки лопасти для каждого сечения, расположенного в начале и конце секции по размаху лопасти, при этом измеряют отклонения триммерных пластин лопасти с помощью приспособления для замера отгиба триммеров, при выполнении замеров в качестве линии задней кромки выбирают середину толщины задней кромки лопасти, при этом за точку отсчета принимают значение «0» шкалы того приспособления для замера отгиба триммеров, которым производятся замеры,
полученные значения заносят в таблицы по секциям для каждого сечения, знаками «+» или «-» соответственно обозначают отклонение задней кромки секции и триммерных пластин верх или вниз относительно значения «0» шкалы приспособления для замера отгиба триммеров,
по полученным значениям строят диаграммы отклонений задней кромки лопастей и триммерных пластин,
анализируют диаграммы и моделируют оптимальное положение лопастей несущего винта относительно друг друга в конусе несущего винта,
определяют величину отгиба триммерных пластин,
значения, полученные в результате моделирования, заносят в таблицу,
выполняют регулировку каждой лопасти комплекта, при этом отгибают триммерные пластины на величину, полученную по результатам моделирования, причем значение со знаком «+» означает необходимость отогнуть триммерную пластину вверх, а значение со знаком «-» означает необходимость отогнуть триммерную пластину вниз.
При проведении измерений отклонений триммерных пластин необходимо плотно прижимать к лопасти приспособление для замера отгиба триммеров.
Кроме того, анализируют диаграммы и моделируют положение задней кромки лопасти при помощи персонального компьютера, на котором установлена программа по построению диаграмм. Фактические значения отклонений триммерных пластин, полученные на этапе предварительных измерений, заносят в таблицу, затем по ним строят диаграмму отклонений задней кромки, при этом выбирают формат линии тренда «линейный» (далее - линейный тренд) отклонений для каждой лопасти, при этом определяет среднегеометрическую зависимость отклонения задней кромки лопасти от значения «0» на шкале приспособления для замера отгиба триммеров по отклонениям задней кромки сечений секций лопастей, указанных в таблице, причем линейный тренд описывается функцией [1]:

где:
у - величина среднегеометрического отклонения,
х - положение по размаху лопасти,
k - коэффициент наклона линии среднегеометрических отклонений линии задней кромки по длине лопасти от значения «0» на шкале приспособления для замера отгиба триммеров,
коэффициент k характеризует отношение отклонений задней кромки сечений, расположенных в начале и конце секции по размаху лопасти, с учетом отклонений триммерных пластин,
линии тренда строят для каждой лопасти и отражают на диаграмме отклонений задней кромки лопастей несущего винта,
по полученным линиям тренда комплекта лопастей определяют линию тренда, находящуюся в оптимальном положении, т.е. наиболее близкую к горизонтальной, при этом коэффициент k в функции [1], описывающей этот тренд, имеет наименьшее по модулю значение, определяют значения отклонений триммерных пластин таким образом, чтобы линии тренда не пересекались в центральных секциях лопастей,
затем для лопасти с наибольшим коэффициентом k методом подбора значений в таблице моделируют положение триммерных пластин, приводя линейный тренд к оптимальному положению, при проведении подбора учитывают расположение триммерных пластин относительно оси вращения несущего винта.
После проведения регулировки, лопасти устанавливают на вертолет, проводят проверку конуса несущего винта по результатам внесенных изменений, записывают положения триммерных пластин в паспорт каждой лопасти.
Для вертолета соосной схемы замеры отклонений задней кромки каждого комплекта или полукомплекта лопастей, построение диаграмм и анализ линейных трендов проводят отдельно для полукомплектов лопастей верхнего и нижнего несущих винтов.
Применение заявленного способа позволяет снизить вибрации вертолета, за счет улучшения соконусности лопастей в полете, что достигается за счет формирования конуса несущего винта, в котором уменьшено влияние производственных отклонений задней кромки лопасти на изменение взаимного расположения лопастей в конусе несущего винта в полете за счет выполнения предварительной регулировки триммерных пластин, отклоненных на величину, определенную по результатам моделирования, проведенного по результатам математического анализа среднегеометрических отклонений задней кромки каждой лопасти.
Изобретение поясняется чертежами, графиками и таблицами:
Фиг. 1 - Приспособление для замера отгиба триммеров лопастей вертолетов;
Фиг. 2 - Эскиз лопасти вертолета, с номерами сечений хвостовых секций вдоль задней кромки лопасти, по которым производят измерения задней кромки лопасти;
Фиг. 3 - Бланк-форма, Таблица №1 для записи фактических значений отклонений по результатам замеров задней кромки лопасти по секциям и сечениям с учетом триммерных пластин;
Фиг. 4 - Таблица №2 фактических значений отклонений задней кромки лопастей по секциям и сечениям перед моделированием;
Фиг. 5 - Таблица №3 значений отклонений задней кромки лопастей по секциям и сечениям и значений положения триммерных пластин после моделирования;
Фиг. 6 - Диаграммы отклонений задней кромки лопастей верхнего несущего винта вертолета после замера, реальные значения;
Фиг. 7 - Диаграммы отклонений задней кромки лопастей верхнего несущего винта после моделирования соконусности лопастей триммерными пластинами;
Фиг. 8 - Диаграммы отклонений задней кромки лопастей нижнего несущего винта вертолета после замера, реальные значения;
Фиг. 9 - Диаграммы отклонений задней кромки лопастей нижнего несущего винта после моделирования соконусности лопастей триммерными пластинами;
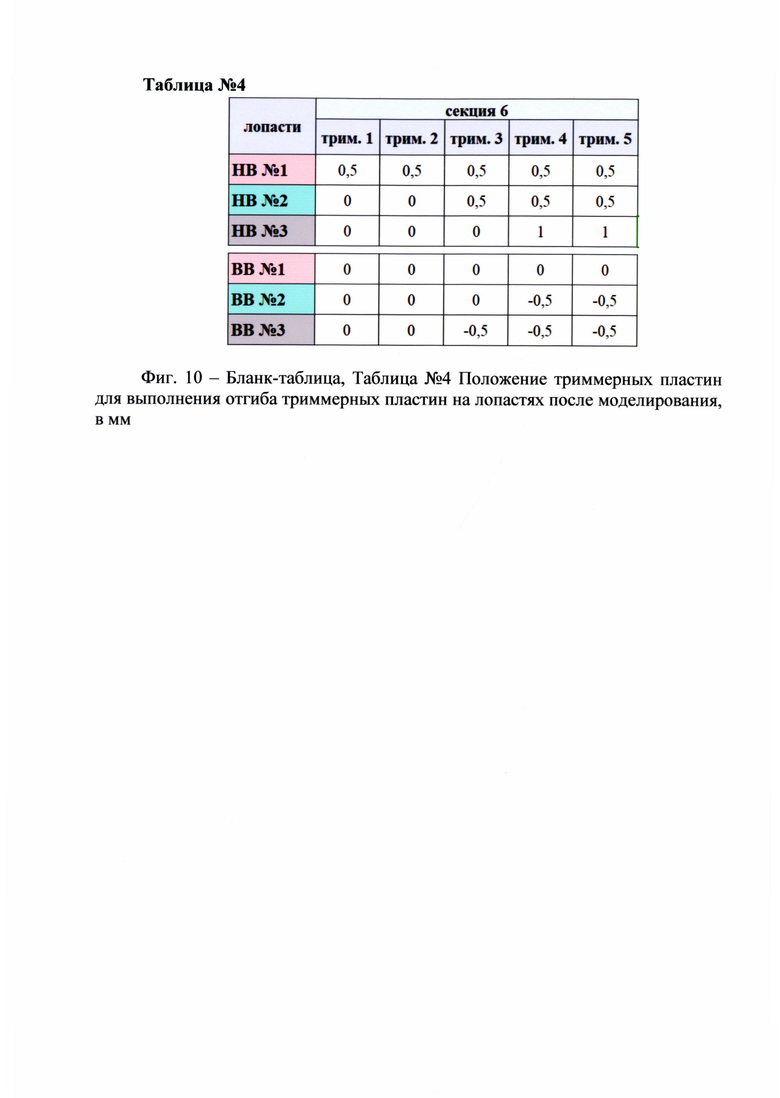
Фиг. 10 - Бланк-таблица, Таблица №4 Положение триммерных пластин для выполнения отгиба триммерных пластин на лопастях после моделирования.
Способ статической регулировки соконусности лопастей несущего винта основан на проведении моделирования соконусности лопастей и выполняется с проведением технико-математического анализа среднегеометрических отклонений задней кромки каждой лопасти несущего винта.
Способ статической регулировки соконусности лопастей несущего винта вертолета включает предварительный и основной этапы и заключается в следующем.
Для реализации предварительного и основного этапов требуется оборудование, необходимое при динамической регулировке вертолета, в том числе приспособление для замера отгиба триммеров, и персональный компьютер, на котором установлена программа с расчетными таблицами по построению диаграмм и линий трендов.
Работы по осуществлению замеров отклонений задней кромки секций для каждого сечения, расположенного в начале и конце секции по размаху лопасти, и отгиба триммерных пластин лопастей несущего винта можно выполнять как на ложементах для хранения лопастей перед установкой лопастей на вертолет, так и на лопастях, установленных на вертолете.
На предварительном этапе проводят измерения отклонений, анализ и определение оптимального положения триммерных пластин, на основном этапе проводят работы с лопастями по отгибу триммерных пластин и динамической регулировке, подтверждающей выполненные расчеты и решения.
Предварительный этап включает операции, при которых:
- измеряют фактическое отклонение задней кромки для каждого сечения, расположенного в начале и конце секции по размаху лопасти и отклонение триммерных пластин в середине ширины пластины с помощью приспособления для замера отгиба триммеров, при этом за точку отсчета принимают значение «0» шкалы приспособления для замера отгиба триммеров, которым производятся замеры, знаками «+» или «-» соответственно обозначают отклонение задней кромки сечения для каждого сечения, расположенного в начале и конце секции по размаху лопасти, и триммерных пластин верх или вниз относительно значения «0» шкалы приспособления для замера отгиба триммеров (фиг.1, 2);
- заполняют таблицы фактических значений отклонений задней кромки лопастей по секциям для каждого сечения и положениям триммерных пластин, полученными фактическими значениями (фиг.3, 4);
- строят на персональном компьютере диаграммы фактических отклонений сечений и триммерных пластин, по значениям Таблицы №2 (фиг.4, 6, 8);
- анализируют диаграммы наклона линий тренда всех лопастей комплекта или полукомплекта верхнего и нижнего несущего винта;
- моделируют оптимальное положение лопастей в комплекте или полукомплекте относительно друг друга в конусе несущего винта и записывают полученные значения в финальную таблицу №4 по результатам моделирования (фиг.5, 7, 9, 10).
Основной этап включает операции, при которых:
- выполняют регулировку триммерных пластин лопастей по результатам моделирования, полученных на предварительном этапе с обязательным использованием приспособления для замера отгиба триммеров, которое использовалось при замерах отклонений линии задней кромки;
- устанавливают лопасти на вертолет;
- проводят гонки и осуществляют динамическую регулировку лопастей, которая подтверждает результаты статической регулировки лопастей;
- записывают в паспорт каждой лопасти положения триммерных пластин с указанием приспособления для отгиба триммеров, которым выполнялись замеры.
На вертолете соосной схемы производят замеры отклонений задней кромки полукомплектов лопастей для верхнего и для нижнего несущих винтов, с построением диаграмм и проведением анализа линейных трендов отдельно для полукомплектов лопастей верхнего и нижнего несущего винта.
На предварительном этапе перед установкой лопастей на вертолет необходимо замерить заднюю кромку лопасти по сечениям в начале и конце каждой секции и в середине ширины каждой триммерной пластины при помощи приспособления для замера отгиба триммеров (фиг.1). Если лопасти уже установлены на вертолет, то измерения можно произвести на вертолете, для чего необходимо иметь стремянку, все работы выполнять с соблюдением правил техники безопасности.
При выполнении замеров линии задней кромки лопасти по сечениям в начале и конце каждой секции необходимо выбрать середину толщины задней кромки лопасти, приспособление для замера отгиба триммеров должно быть плотно прижато к лопасти в процессе применения, как показано на фиг.1, от этого зависит результат регулировки.
Так как лопасть состоит из нескольких секций, замеры необходимо выполнить для заданных сечений, расположенных в начале и в конце каждой секции, при этом отклонения триммерных пластин замеряют в середине ширины триммерной пластины (фиг.2).
Моделирование соконусности лопастей несущего винта и математический анализ среднегеометрических отклонений задней кромки лопасти проводят при помощи персонального компьютера, на котором установлена программа по построению диаграмм.
Фактические значения отклонений триммерных пластин, на этапе предварительных измерений отклонений, записывают в бланк-форму Таблицу №1, по которым заполняется аналогичная Таблица №2 на персональном компьютере (фиг.3). По значениям, приведенным в Таблице №2, строят диаграмму отклонений задней кромки и линейный тренд отклонений для каждой лопасти.
На фиг.6-9 показаны диаграммы и линейные тренды, при этом линейный тренд определяет среднегеометрическую зависимость отклонения задней кромки лопасти от значения «0» приспособления для замера отгиба триммеров по фактическим отклонениям задней кромки сечений секций, указанных в таблице. Линейный тренд можно построить, основываясь на всем ряде измеренных значений, а также на основании значений без учета сечений, близких к оси вращения несущего винта.
Линейный тренд описывается функцией [1]:
где:
у - величина среднегеометрического отклонения,
х - положение по размаху лопасти,
k - коэффициент наклона линии среднегеометрических отклонений линии задней кромки по длине лопасти от значения «0» на шкале приспособления для замера отгиба триммеров.
Коэффициент k характеризует отношение отклонений задней кромки сечений, расположенных в начале и конце секции по размаху лопасти, с учетом отклонений триммерных пластин.
Конкретные значения коэффициента k получают при построении диаграммы по заданным значениям с помощью программы на персональном компьютере из полученной формулы [1].
Линии тренда строят для каждой лопасти и отражают на диаграмме отклонений несущего винта.
По полученным линиям тренда комплекта лопастей определяют линию тренда, находящуюся в оптимальном положении, т.е. наиболее близкую к горизонтальной, при этом коэффициент k в функции [1], описывающей этот тренд, имеет наименьшее по модулю значение. Определяют значения отклонения триммерных пластин таким образом, чтобы линии тренда лопастей комплекта не пересекались в центральных секциях.
Полученные значения положений триммерных пластин, переписывают в Таблицу №3 для проведения моделирования (фиг.5). Для лопасти с наибольшим коэффициентом k методом подбора значений в таблице моделируют положение триммерных пластин комплекта лопастей несущих винтов, приводя линейный тренд к оптимальному положению. При проведении подбора учитывают расположение триммерных пластин относительно оси вращения несущего винта.
По результатам моделирования, заполняют бланк-форму Таблицу №4, необходимую для выполнения работ по отгибу триммерных пластин на лопастях несущего винта (фиг.10).
При выполнении работ основного этапа необходимо выполнить работы по регулировке лопастей, выполнить регулировку триммерных пластин лопастей по результатам моделирования согласно Таблице №4, полученным на предварительном этапе, затем установить лопасти на вертолет, не нарушая отрегулированного положения триммерных пластин. Для проверки внесенных изменений необходимо выполнить работы по динамической регулировке лопастей несущих винтов в соответствии с технологической картой. Для этого готовят вертолет к наземной гонке и проводят динамическую регулировку для проверки соконусности на режимах «Малого газа» и «Автоматический».
На основании полученной информации готовят протокол о выполнении динамической регулировки комплекта лопастей.
Пример осуществления способа выполнен следующим образом.
На фиг.4-10 приведены результаты применения способа статической регулировки лопастей на примере вертолета соосной схемы с верхним и нижним полукомплектами несущих винтов.
На фиг.3 изображена бланк-форма - Таблица №1, в которую необходимо внести по результатам измерений все фактические замеры отклонений задней кромки для каждого сечения лопастей несущего винта в мм, с учетом отгиба триммерных пластин.
В колонки «секция 6», столбцы «трим.1», «трим.2», «трим.3», «трим.4», «трим.5» вносят значения замеров отклонений каждой триммерной пластины относительно значения «0» на шкале приспособления для замера отгиба триммеров (в мм), как указано на фиг.1, с помощью знаков «+» или «-» обозначают положение триммерной пластины вверх или вниз.
На фиг.4 изображена Таблица №2, в которую переносят из заполненной Таблицы №1 результаты замеров задней кромки лопасти по сечениям в начале и конце каждой секции и положения триммерных пластин после замеров на лопастях. Для наглядного примера заполнения таблиц и построения диаграмм был выбран вертолет соосной схемы с верхним и нижним несущими винтами, у вертолета наблюдалась повышенная вибрация.
На фиг.6 изображены диаграммы, построенные по результатам замеров, внесенных в Таблицы №2. На диаграмме изображены отклонения задней кромки трех лопастей комплекта верхнего винта (далее - ВВ), пунктирной линией показан линейный тренд, на диаграмме он отображен как «линейная». На диаграмме выделен участок «А», на котором видно пересечение линий лопастей, это означает, что на разных скоростях вертолета траектории взаимного расположения лопастей могут меняться местами, что повлечет появление вибраций вертолета. Данное предположение было подтверждено методом измерения соконустости лопастей несущего винта в полете вертолета на разных скоростных режимах.
На фиг.8 изображена диаграмма, построенная по результатам замеров лопастей нижнего НВ. На диаграмме выделен участок «Б», на котором видно, что пунктирные линии тренда (линейный тренд) лопастей нижнего винта НВ №1 и НВ №2 находятся ниже линии тренда лопасти НВ №3 и при этом пересекаются друг с другом. Полукомплекты лопастей верхнего и нижних винтов, по линейным графикам, отличаются друг от друга. Графики/тренды лопастей нижнего винта все направлены вниз, а графики/тренды комплекта лопастей ВВ направлены вверх. Делают вывод о том, что необходимо провести регулировку полукомплектов лопастей нижнего и верхнего несущих винтов.
С помощью таблицы №3 (фиг.5) и диаграмм (фиг.7 и фиг.9) моделируют соконусность лопастей несущих винтов таким образом, чтобы линии тренда лопастей (на диаграмме «линейная», сеч.7а), были расположены рядом друг с другом и не пересекались между собой в центральной части диаграммы, как показано на фиг.7 и фиг.9.
На фиг.7, фиг.9, изображены диаграммы, отражающие результаты моделирования соконусности на персональном компьютере.
Из таблицы №3 (фиг.5) выписывают положения триммерных пластин в таблицу №4 (фиг.10), при этом заполняют столбцы «трим.1, трим.2, трим.3, трис.4, трим.5», по которым в дальнейшем выполняют отгиб триммерных пластин на лопасти с обязательным применением того приспособления для замера отгиба триммеров, которое использовалось при первом измерении, с учетом знака. Положительное значение со знаком «+» означает необходимость отогнуть триммерную пластину вверх; знак «-» означает необходимость отогнуть триммерную пластину вниз.
Предлагаемый способ статической регулировки соконусности лопастей имеет ряд особенностей и преимуществ.
Отличие предлагаемого способа при определении величины отгиба триммерных пластин от действующего способа согласно технологической карте, заключается в том, что по предлагаемому способу величина отгиба определяется расчетным методом с последующей проверкой, а при использовании способа согласно технологической карте величину отгиба триммерных пластин определяют непосредственно на вертолете при выполнении практических работ по динамической регулировке соконусности несущих винтов по принципу «отогнул - проверил». Определение величины отгиба триммерных пластин способом согласно действующим технологическим картам определяется при выполнении динамической регулировки и не всегда приводит к желаемым результатам по вибрации на скоростных режимах, поэтому не всегда удается определить оптимальное отклонение триммерных пластин в рамках количества запусков согласно технологической карте.
Отклонения лопасти от теоретического контура являются индивидуальной особенностью как каждой лопасти, таким образом каждый комплект лопастей в целом так же является индивидуальным. Поэтому преимуществом при реализации предлагаемого способа статической регулировки соконусности лопастей несущего винта является то, что определение величины отгиба триммерных пластин для устранения «перебежек» комплекта лопастей могут быть выполнены один раз, в дальнейшем требуется только проверка положения отгиба триммерных пластин в период эксплуатации.
Предлагаемый способ статической регулировки соконусности лопастей позволяет на основе анализа среднегеометрических отклонений задней кромки лопасти рассчитать отклонения триммерных пластин, смоделировать взаимное расположение лопастей в конусе несущего винта с последующим проведением работ по регулировке лопастей на вертолете.
Практика показала, что после применения предлагаемого метода статической регулировки соконусности лопастей несущих винтов конус верхнего и нижних винтов находится в допустимых значениях. Проверка соконусности нужна только для подтверждения этого факта, после проверки соконусности вертолет готов к выполнению летных заданий. Достигается снижение вибраций на разных скоростных режимах полета вертолета.
Сопутствующим техническим результатом снижения вибраций является:
- увеличение ресурса вертолета за счет сокращения количества необходимых запусков при динамической регулировке вертолета;
- увеличение ресурса вертолета за счет повышения показателя отказобезопасности агрегатов и вертолета в целом, как следствие снижения вибраций вертолета в полете;
- повышение отказобезопасности вертолета за счет снижения износа узлов и агрегатов несущей системы, являющихся следствием эксплуатации вертолета с повышенными вибрациями;
- сокращение трудоемкости подготовки вертолета к полетам после проведения регламентных работ, требующих повторной динамической регулировки несущего винта;
- сокращение трудоемкости работ по динамической регулировке, которое приводит к сокращению времени на подготовку вертолета к выполнению полетов за счет уменьшения количества наземных гонок вертолета при проведении динамической регулировки и за счет предварительно выполненного моделирования на персональном компьютере.
Способ позволяет выполнить регулировку лопастей до установки их на вертолет, а также проверить положение триммерных пластин лопасти при проведении плановых регламентных работ в период эксплуатации вертолета.
Способ может быть применим для первоначальной регулировки лопастей после их изготовления на заводе-изготовителе перед их первой установкой на вертолет.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАХОВОГО ДВИЖЕНИЯ, СОКОНУСНОСТИ И СБЛИЖЕНИЯ ЛОПАСТЕЙ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2789233C1 |
| ЛОПАСТЬ ВИНТА И АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ ЛОПАСТИ (ВАРИАНТЫ) | 1996 |
|
RU2145293C1 |
| Лопасть несущего винта вертолета | 2017 |
|
RU2662591C1 |
| Способ определения и устранения индивидуальных различий лопастей несущего винта винтокрылого летательного аппарата | 2022 |
|
RU2804546C1 |
| Лопасть воздушного винта многоконтурной конструкции | 2021 |
|
RU2767574C1 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
| АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ НЕСУЩЕГО ЭЛЕМЕНТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2808523C1 |
| Аэродинамический профиль несущего элемента летательного аппарата | 2023 |
|
RU2808522C1 |
| АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ ПОПЕРЕЧНОГО СЕЧЕНИЯ НЕСУЩЕЙ ПОВЕРХНОСТИ (ВАРИАНТЫ) | 2014 |
|
RU2547475C1 |
| АЭРОДИНАМИЧЕСКИЙ ПРОФИЛЬ ПОПЕРЕЧНОГО СЕЧЕНИЯ НЕСУЩЕЙ ПОВЕРХНОСТИ | 2014 |
|
RU2559181C1 |




Изобретение относится к области вертолетостроения, а именно к способам статической регулировки лопастей несущего винта вертолета. Способ статической регулировки лопастей соконусности несущего винта включает проведение предварительных замеров положения задней кромки по размаху лопасти по сечениям. Измеряют отклонения положения триммерных пластин лопасти приспособлением для замера отгиба триммеров. В качестве линии кромки выбирают середину толщины кромки лопасти и триммерной пластины, причем за точку отсчета принимают значение «0» шкалы упомянутого приспособления. Полученные значения заносят в таблицы. По полученным значениям строят диаграммы фактических отклонений сечений секций и триммерных пластин. Анализируют диаграммы и моделируют оптимальное положение лопастей одного комплекта лопастей несущего винта относительно друг друга в конусе несущего винта. Значения, полученные в результате моделирования, заносят в таблицу. Определяют необходимую величину отгиба триммерных пластин. Достигается снижение вибраций вертолета в полете на разных скоростных режимах и, как следствие, возможность увеличения скоростных параметров вертолета. 4 з.п. ф-лы, 10 ил.
1. Способ статической регулировки соконусности лопастей несущего винта вертолета, характеризующийся тем, что
измеряют отклонение задней кромки лопасти для каждого сечения, расположенного в начале и конце секции по размаху лопасти, при этом измеряют отклонения триммерных пластин лопасти с помощью приспособления для замера отгиба триммеров, при выполнении замеров в качестве линии задней кромки выбирают середину толщины задней кромки лопасти, при этом за точку отсчета принимают значение «0» шкалы того приспособления для замера отгиба триммеров, которым производятся замеры,
полученные значения заносят в таблицы по секциям для каждого сечения, знаками «+» или «-» соответственно обозначают отклонение задней кромки секции и триммерных пластин вверх или вниз относительно значения «0» шкалы приспособления для замера отгиба триммеров,
по полученным значениям строят диаграммы отклонений задней кромки лопастей и триммерных пластин,
анализируют диаграммы и моделируют оптимальное положение лопастей несущего винта относительно друг друга в конусе несущего винта,
определяют величину отгиба триммерных пластин,
значения, полученные в результате моделирования, заносят в таблицу,
выполняют регулировку каждой лопасти комплекта, при этом отгибают триммерные пластины на величину, полученную по результатам моделирования, причем значение со знаком «+» означает необходимость отогнуть триммерную пластину вверх, а значение со знаком «-» означает необходимость отогнуть триммерную пластину вниз.
2. Способ статической регулировки соконусности лопастей несущего винта вертолета по п. 1, отличающийся тем, что при проведении измерений отклонений триммерных пластин необходимо плотно прижимать к лопасти приспособление для замера отгиба триммеров.
3. Способ статической регулировки соконусности лопастей несущего винта вертолета по любому из пп. 1, 2, отличающийся тем, что анализируют диаграммы и моделируют положение задней кромки лопасти при помощи персонального компьютера, на котором установлена программа по построению диаграмм, фактические значения отклонений триммерных пластин, полученные на этапе предварительных измерений, заносят в таблицу, затем по ним строят диаграмму отклонений задней кромки и линейный тренд отклонений для каждой лопасти, при этом определяет среднегеометрическую зависимость отклонения задней кромки лопасти от значения «0» на шкале приспособления для замера отгиба триммеров по отклонениям задней кромки сечений секций лопастей, указанных в таблице, причем линейный тренд описывается функцией [1]:
 ,
,
где у - величина среднегеометрического отклонения,
х - положение по размаху лопасти,
k - коэффициент наклона линии среднегеометрических отклонений линии задней кромки по длине лопасти от значения «0» на шкале приспособления для замера отгиба триммеров,
коэффициент k характеризует отношение отклонений задней кромки сечений, расположенных в начале и конце секции по размаху лопасти, с учетом отклонений триммерных пластин,
линии тренда строят для каждой лопасти и отражают на диаграмме отклонений задней кромки лопастей несущего винта,
по полученным линиям тренда комплекта лопастей определяют линию тренда, находящуюся в оптимальном положении, т.е. наиболее близкую к горизонтальной, при этом коэффициент k в функции [1], описывающей этот тренд, имеет наименьшее по модулю значение, определяют значения отклонений триммерных пластин таким образом, чтобы линии тренда не пересекались в центральных секциях лопастей,
затем для лопасти с наибольшим коэффициентом k методом подбора значений в таблице моделируют положение триммерных пластин, приводя линейный тренд к оптимальному положению, при проведении подбора учитывают расположение триммерных пластин относительно оси вращения несущего винта.
4. Способ статической регулировки соконусности лопастей несущего винта вертолета по любому из пп. 1-3, отличающийся тем, что после проведения регулировки лопасти устанавливают на вертолет, проводят проверку конуса несущего винта по результатам внесенных изменений, записывают положения триммерных пластин в паспорт каждой лопасти.
5. Способ статической регулировки соконусности лопастей несущего винта вертолета по любому из пп. 1-4, отличающийся тем, что для вертолета соосной схемы замеры отклонений задней кромки каждого комплекта или полукомплекта лопастей, построение диаграмм и анализ линейных трендов проводят отдельно для полукомплектов лопастей верхнего и нижнего несущих винтов.
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2336508C1 |
| СПОСОБ БАЛАНСИРОВКИ ВОЗДУШНЫХ ВИНТОВ ВЕРТОЛЕТОВ | 2001 |
|
RU2180735C1 |
| Средство техническое | 2020 |
|
RU2781196C2 |
| US 20090324409 A1, 31.12.2009 | |||
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |
