Изобретение относится к области измерений, в частности к проверке статической балансировки конструкций, и может быть использовано для балансировки несущих и рулевых винтов вертолетов.
Известен способ балансировки воздушных винтов, включающий определение статического момента лопасти в осевом направлении, податливость лопасти в разных сечениях путем нагружения ее постоянной и равной нагрузкой, комплектование их, уравновешивание противоположно расположенных на втулке лопастей и сборку несущего винта. (Авторское свидетельство SU N 1239535 А1. Способ сборки воздушных винтов с податливьми лопастями. - МКИ: G 01 М 1/12. - Бюл. 23, 23.06.1986). Данный способ принят за прототип.
Недостатком известного способа является недостаточная сбалансированность воздушных винтов, которая вызывает повышенный уровень вибрации вертолета, что приводит к ухудшению летных характеристик вертолета (дальность полета, грузоподъемность и экономичность) и увеличению вероятности возникновения аварийных ситуаций.
Задачей предлагаемого технического решения является уменьшение дебаланса и несоконусности лопастей воздушных винтов вертолета за счет дополнительного учета отклонений углов закрутки и центробежных сил лопастей, а также атмосферных условий эксплуатации вертолета.
Технический результат - снижение уровня вибрации, повышение комфортности и безопасности полета, увеличение силы тяги и уменьшение расхода топлива за счет улучшения качества балансировки воздушных винтов вертолета.
Указанный технический результат достигается тем, что в известном способе балансировки воздушных винтов вертолетов, включающем определение продольного статического момента лопасти как произведение массы лопасти на расстояние от центра тяжести ее до оси вращения винта, прогиба в разных сечениях лопасти путем нагружения ее постоянной и равной нагрузкой, уравновешивание противоположно расположенных лопастей, кинематически соединяемых с тягами автомата перекоса, и установку их на втулку воздушного винта, согласно предложенному техническому решению:
1) перед установкой лопастей на втулку воздушного винта каждую лопасть предварительно нумеруют в порядке позиций втулки и на каждой из них замеряют углы закрутки в заданных сечениях, затем по величинам статических моментов моделируют расстановку номеров комплекта лопастей по позициям из условия получения наименьшего дебаланса центробежных сил противоположно устанавливаемых на втулке лопастей, после чего последние закрепляют на втулке в порядке номеров, определенном моделированием;
2) при определении веса и центра тяжести лопасти последнюю устанавливают с опорой на ее носовую часть;
3) перед моделированием расстановки лопастей на втулке воздушного винта производят статическую балансировку всего комплекта по статическим моментам в заданных границах разброса центров тяжестей лопастей путем установки на их концах дополнительных балансировочных грузов;
4) прогиб лопасти определяют путем закрепления ее в горизонтальном положении так, чтобы изгиб лопасти соответствовал изгибу ее в полете вертолета, затем лопасть нагружают постоянной и равной нагрузкой, измеряют прогиб ее в заданных сечениях под действием приложенной нагрузки и по сумме результатов замера определяют среднюю величину прогиба лопасти;
5) прогиб каждой лопасти выравнивают по среднему уровню прогиба всех лопастей комплекта дополнительными аэродинамическими силами, создаваемыми каждой лопастью, для чего ее триммер поворачивают на угол, соответствующий значению и величине отклонения конца лопасти от средней величины прогиба лопастей воздушного винта.
6) длину тяг автомата перекоса воздушного винта устанавливают в соответствии с параметрами атмосферы места эксплуатации вертолета (давления, температуры, плотности и т.п.);
7) длину тяги автомата перекоса для каждой лопасти корректируют на величину, соответствующую величине отклонения усредненного значения угла закрутки лопасти, полученной путем приведения всех углов закрутки лопасти в заданных сечениях с соответствующими им весовыми коэффициентами, от средней величины их по всему комплекту.
Проведенный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленного способа балансировки воздушных винтов вертолетов, отсутствуют. Следовательно, заявляемое техническое решение соответствует условию патентоспособности "новизна".
Результаты поиска известных решений в данной области техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого технического решения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявляемого технического решения преобразований на достижение указанного технического результата. Следовательно, заявляемое техническое решение соответствует условию патентоспособности "изобретательский уровень".
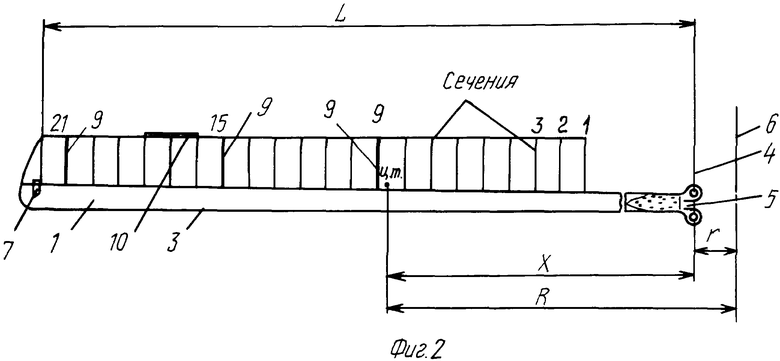
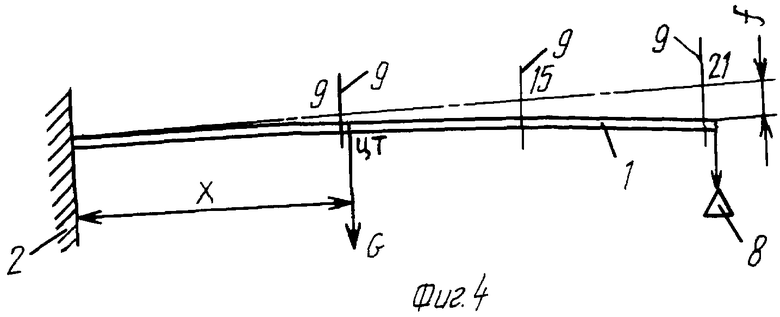
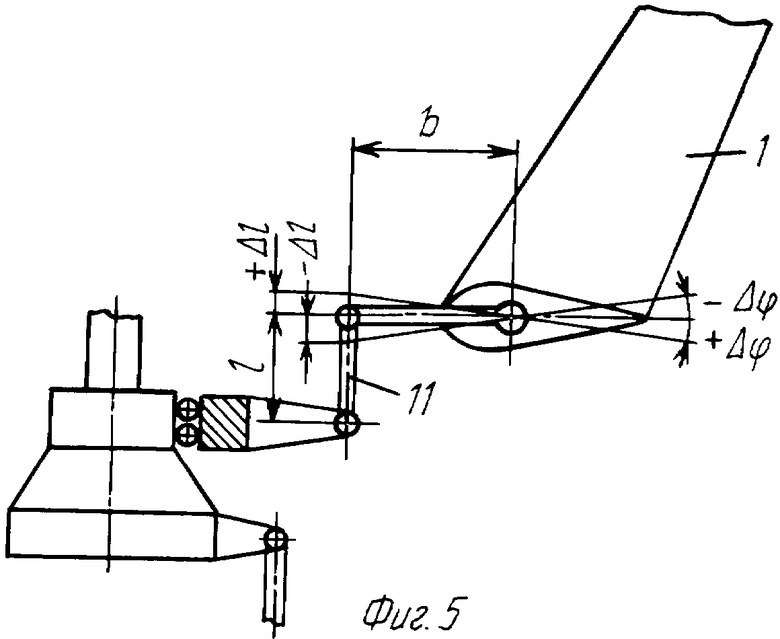
На фиг. 1 показана схема расположения лопастей на втулке воздушного винта, вид вертолета сверху; на фиг.2 - лопасть несущего винта; на фиг.3 - схема установки лопасти при статическом балансировании; на фиг.4 - схема измерения прогиба лопасти; на фиг.5 - кинематическая схема соединения тяги автомата перекоса несущего винта с лопастью.
Предложенный способ осуществляют следующим образом.
Перед установкой лопастей 1 на втулку 2 воздушного винта ведут нумерацию лопастей 1 в порядке N в соответствии с позициями П на втулке 2 (фиг.1). Затем лопасть 1 устанавливают на носовую часть 3 ее, измеряют массу m лопасти, находят положение центра тяжести ЦТ и измеряют расстояние х от него до линии 4 центров отверстий на комле 5 лопасти 1 (фиг.2). В заданных сечениях лопасти измеряют углы закрутки ϕ. Для каждой лопасти комплекта вычисляют продольный статический момент Мст, как произведение массы т на расстояние R от центра тяжести ЦТ лопасти до оси 6 вращения винта, и по их результатам производят балансировку всего комплекта лопастей в пределах заданных границ разброса центров тяжести х путем установки на их концах дополнительных балансировочных грузов 7. По сбалансированным продольным статическим моментам лопастей 1 моделируют расстановку номеров N комплекта лопастей по позициям П втулки из условия получения наименьшего дебаланса противоположно устанавливаемых на втулке лопастей 1, для чего сравнивают и выбирают наибольший дебаланс центробежных сил ΣPцб каждой из пар противоположно устанавливаемых лопастей выбранной комбинации расстановки комплекта на втулке несущего винта с последующим выбором варианта расстановки лопастей N на втулке несущего винта с наименьшим дебалансом d из всех комбинаций расстановки комплекта согласно выражению: ,
,
где i - количество лопастей в комплекте;
j - количество комбинаций, равное i!;
N - порядковый номер лопасти.
После этого определяют прогиб f каждой лопасти N (фиг.4). Для этого лопасть 1 комлем 5 закрепляют в горизонтальном положении так, чтобы изгиб лопасти соответствовал изгибу ее в полете вертолета, затем лопасть нагружают постоянной и равной нагрузкой 8, измеряют прогиб f ее в заданных сечениях 9 и по сумме результатов замера определяют среднюю величину прогиба лопасти. Затем прогиб каждой лопасти выравнивают по среднему уровню прогиба всех лопастей комплекта дополнительными аэродинамическими силами, создаваемыми каждой лопастью, для чего ее триммер 10 поворачивают на угол α, соответствующий значению и величине отклонения конца лопасти от средней величины прогиба лопастей несущего винта. После всего лопасти 1 закрепляют на втулке в порядке номеров N, определенном моделированием, и соединяют их с тягами 11 автомата перекоса несущего винта (фиг. 5). Длину l тяг автомата перекоса устанавливают в соответствии с параметрами атмосферы места эксплуатации вертолета (давления, температуры, плотности и т.п.). Длину l тяги 11 автомата перекоса для каждой лопасти N корректируют на величину Δl, соответствующую величине отклонения усредненного значения угла закрутки лопасти, полученной путем приведения всех углов закрутки ϕ лопасти 1 по сечениям 9 с соответствующими им весовыми коэффициентами, от средней величины их по всему комплекту.
Пример осуществления способа балансировки несущего пятилопастного винта.
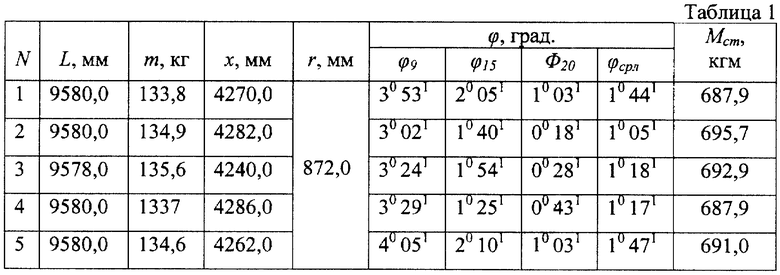
Перед установкой лопастей на втулку несущего винта вертолета МИ-8 брали комплект лопастей в количестве 5 штук и нумеровали их по порядку номеров от 1 до 5. Затем каждую лопасть 1 с базой на носовую часть 3 устанавливали в балансировочное устройство и определяли массу m и положение центра тяжести лопасти, затем измеряли расстояние х от ЦТ до линии 4 центров отверстий на комле 5 лопасти 1. С помощью приспособления в заданных сечениях 9, 15 и 20 лопасти 1 измеряли углы закрутки ϕ лопасти. Результаты измерений сведены в табл. 1.
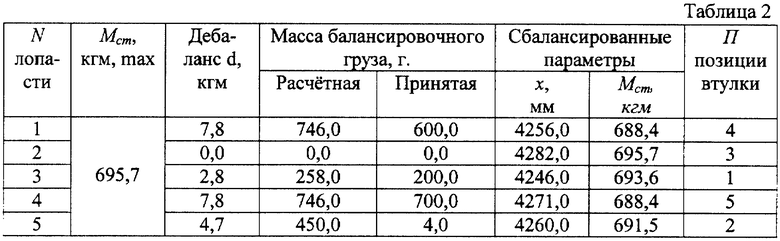
Для каждой лопасти комплекта вычислили продольный статический момент Мст, как произведение массы m на расстояние R от центра тяжести ЦТ лопасти до оси 6 вращения винта, и по их результатам производили балансировку всего комплекта лопастей путем установки на их концах дополнительных балансировочных грузов 7. Результаты балансировки продольных статических моментов комплекта лопастей приведены в табл. 2.
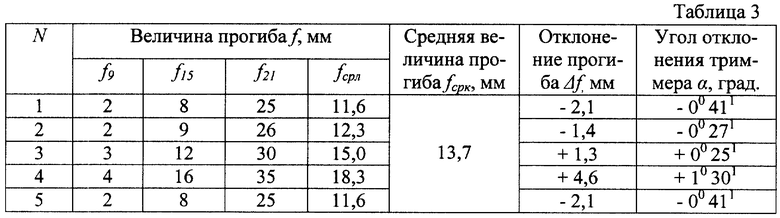
По сбалансированным продольным статическим моментам лопастей 1 произвели моделирование расстановки номеров N комплекта лопастей по позициям П из условия получения наименьшего дебаланса противоположно устанавливаемых на втулке лопастей 1, для чего сравнивали и выбирали наибольший дебаланс dmax центробежных сил каждой из пар противоположно устанавливаемых лопастей выбранной комбинации расстановки комплекта на втулке несущего винта с последующим выбором варианта расстановки лопастей N на втулке несущего винта с наименьшим дебалансом dmin из всех комбинаций расстановки комплекта. После этого определяли стрелу прогиба f каждой лопасти N. Для этого лопасть 1 комлем 5 закрепляли в горизонтальном положении, затем лопасть нагружали постоянной и равной нагрузкой 8 весом 5 кг и измеряли прогиб f ее в сечениях 9, 15 и 21, образуемый под воздействием веса G лопасти 1 и нагрузки 8. Результаты измерений сведены в табл. 3.
По сумме результатов замера определили среднюю величину стрелы прогиба fcрл лопасти. Затем стрелу прогиба каждой лопасти выравнивали по среднему уровню прогиба всех лопастей триммерами 10, поворачивая их на угол α, соответствующий значению и величине отклонения конца лопасти от средней величины прогиба комплекта fcpк лопастей несущего винта. После этого лопасти 1 закрепили на втулке в порядке номеров N, определенном моделированием, и соединили их с тягами 11 автомата перекоса несущего винта. Длину l тяг автомата перекоса установили равной 380 мм в соответствии с параметрами атмосферы места эксплуатации вертолета (давления 750 мм рт. ст., температуры - 2oС, плотности 1,0485 кг/м3).
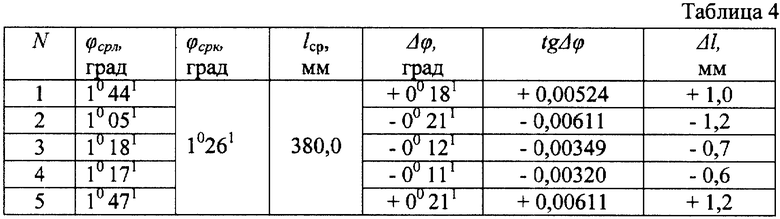
Длину l тяги 11 автомата перекоса для каждой лопасти N корректировали на величину, соответствующую значению и величине отклонения усредненного значения угла закрутки лопасти ϕсрл, полученным путем приведения всех углов закрутки ϕ лопасти 1 по сечениям 9 с соответствующими им весовыми коэффициентами, от средней величины их по всему комплекту ϕсрк. Результаты расчетов приведены в табл. 4.
На этом закончили балансировку несущего винта вертолета.
Балансировка воздушных винтов предложенным способом позволила ликвидировать тряску и свести к минимуму вибрацию вертолета, повысить тягу несущего винта за счет высвобождаемой дополнительной мощности, непроизводительно затрачиваемой на возбуждение колебаний корпуса вертолета. В результате, вместе с повышением надежности вертолета и комфортности полета, увеличены скорость, грузоподъемность, экономичность и срок эксплуатации вертолета. После перебалансировки предложенным способом лопастей эксплуатируемых вертолетов их скорость возросла до 30%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАТИЧЕСКОЙ РЕГУЛИРОВКИ СОКОНУСНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2023 |
|
RU2809683C1 |
| Гидросамолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями | 2021 |
|
RU2781817C1 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2336508C1 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
| ЛОПАСТНОЙ ПОДУЗЕЛ НЕСУЩЕГО ВИНТА БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2125952C1 |
| НЕСУЩИЙ ВИНТ | 2005 |
|
RU2296697C1 |
| СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ | 2015 |
|
RU2613136C1 |
| ПРИВОДНОЙ КИНЕМАТИЧЕСКИЙ УЗЕЛ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2114766C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ В СИСТЕМЕ ПРОДОЛЬНОГО УПРАВЛЕНИЯ И УПРАВЛЕНИЯ ОБЩИМ ШАГОМ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2556043C1 |
| УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 2005 |
|
RU2292021C1 |

Изобретение предназначено для проверки статической балансировки конструкций и может быть использовано для балансировки несущих и рулевых винтов вертолетов. Для повышения комфортности и безопасности полета, снижения потерь мощности, вызываемых вибрацией вертолета, перед установкой лопастей на втулку воздушного винта вертолета осуществляют статическую балансировку лопастей и по их результатам моделируют расстановку лопастей на втулке воздушного винта из условия уравновешивания центробежных сил. Триммеры каждой лопасти поворачивают на угол, соответствующий значению и величине отклонения конца лопасти от средней величины прогиба комплекта лопастей воздушного винта. Длину тяг автомата перекоса в зависимости от параметров атмосферы места эксплуатации вертолета корректируют на величину, соответствующую величине отклонения усредненного значения угла закрутки каждой лопасти комплекта. 6 з.п. ф-лы, 5 ил., 4 табл.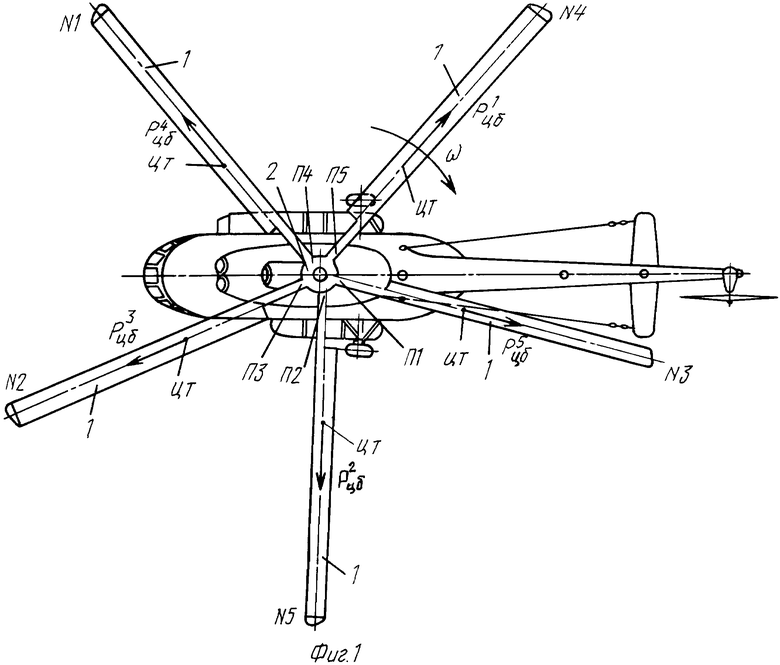
| Способ сборки воздушных винтов с податливыми лопастями | 1984 |
|
SU1239535A1 |
| Устройство для возведения податливой крепи из спецпрофиля | 1979 |
|
SU1057692A1 |
| Способ подбора лопаток турбин иКОМпРЕССОРОВ | 1977 |
|
SU813149A2 |
| Способ балансировки гребного винта | 1987 |
|
SU1456796A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 1995 |
|
RU2138790C1 |
| US 4078422, 14.03.1978. | |||
