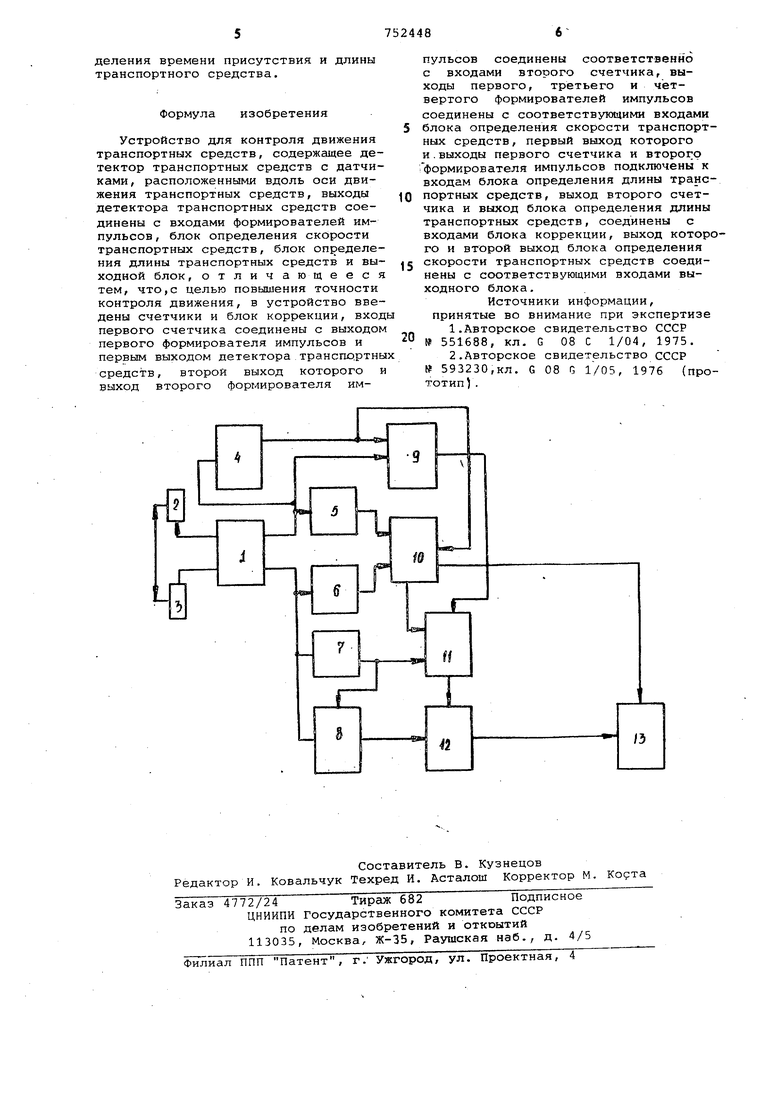
с соответствующими входами выходного блока. На чертеже представлена блок-схем устройства, содержащая детектор 1 транспортных средств с датчиками 2 и 3, причем детектор выполнен магнит метрическим и датчики представляют с бой феррозонды, формирователи 4-7 импульсов, счетчики 8,9, блок 10 опр деления скорости транспортных средст блок 11 определения длины транспортных средств, блок 12 корреляции, выходной блок 13. Устройство работает следующим образом. Измеренная величина времени при сутствия и длины транспортного средства зависит от скорости и от типа транспортного средства. Чтобы исключить эту зависимость и определить действительное значение, необходимо ввести коррекцию измеренной величины. При проезде транспортного средств через контролируемую зону первого да чика 2 на выходе детектора 1 появляе ся сигнал, который поступает на формирователи импульсов 4,5 и на счетчик 9, последний определяет величину времени нахождения транспортного средства в контролируемой зоне перво го датчика 2 по длительности импульса с этого датчика. Одновременно фор мирователь 5 импульсов по переднему фронту импульса с детектора 1 формирует импульс, который поступает на вход блока 10 определения скорости. При проезде транспортного средства через контролируемую зону второго да чика 3 на выходе детектора 1 появляе ся сигнал, который поступает на вхо ды формирователей б,7 импульсов и счетчика 8. При этом по переднему фронту сигнала с детектора 1 формирователь б формирует импульс, посту пающий на вход блока 10 определения скорости. Блок 10 определения скоро ти по этому сигналу производит вычисление скорости движения транспор ного средства по формуле где V - скорость движения транспор ного средства; Cg - расстояние между контролируемыми зонами датчиков, которое выбирается меньше минимальной длины транспор ных средств; t - время прохождения 8л . Поскольку.расстояние между датчи ками меньше, чем минимально возможная длина транспортного средства, то скорость будет уже вычислена до окончания отсчета времени присутствия транспортного средства в контро лируемой зоне первого датчика 2. По окончании времени присутствия транс портного средства в контролируемой зоне первого датчика 2 по заднему фронту импульса с детектора 1 формирователь 4 импульсов формирует импульс, поступающий на соответствующий вход счетчика 9 и блока 10 определения скорости. По этому сигналу информация из счетчика 9 поступает на вход блока 11 определения длины транспортных средств. Блок 11 определения длины транс портных средств производит вычисление длины движущегося транспортного средства по формуле е -1, TCi V где fj,j длина транспортного средства по первому датчику 2; время нахождения транспортного средства в контролируемой зоне первого датчика 2; V - скорость движения транспортного средства. После вычисления длины транспортного средства Е. j по первому датчику при скорости движения V в блоке 11 определения длины выбираются коэффициенты, необходимые для корректировки величины времени нахождения транспортного средства в контролируемой зоне второго датчика. Одновременно счетчик 9 отсчитывает величину, соответствующую времени нахождения транспортного средства в контролируемой зоне датчика 3. При выезде транспортного средства из контролируемой зоны датчика 3 по заднему фронту импульса с детектора 1 формирователь 7 формирует импульс, который поступает на соответствующие входы счетчика 8 и блока определения длины транспортных средств 11, последние по этой команде выдают записанную в них информацию вблок 12 коррекции, где производится коррекция длительности импульса, полученного со второго выхода детектора 1, 2-К1-К2, пр пр где tnp 2 измеренное время присутствия транспортного средства в контролируемой зоне второго датчика 3; К1,К2 - коэффициенты, учитывающие приращение длины транспортного средства. Сигнал с выхода блока 12 коррекции, соответсвующий величине истинного времени присутствия транспортного в контролируемой зоне второго датчика 3, поступает на соответствующий вход выходного блока 13, на другой вход которого поступает сигнал с блока 10 определения скорости. Выходной блок 13 производит по данным сигналам вычисление истинной длины транспортного средства. Предлагаемое техническое устройство позволяет повысить точность определения времени присутствия и длины транспортного средства.
Формула изобретения
Устройство для контроля движения транспортных средств, содержащее детектор транспортных средств с датчиками, расположенными вдоль оси движения транспортных средств, выходы детектора транспортных средств соединены с входами формирователей импульсов , блок определения скорости транспортных средств, блок определения длины транспортных средств и выходной блок, отличающееся тем, что,с целью повышения точности контроля движения, в устройство введены счетчики и блок коррекции, вход первого счетчика соединены с выходом первого формирователя импульсов и первым выходом детектора транспортны средств, второй выход которого и выход второго формирователя импульсов соединены соответственно с входами второго счетчика, выходы первого, третьего и четвертого формирователей импульсов соединены с соответствукмдими входами блока определения скорости транспортных средств, первый выход которого и.выходы первого счетчика и второго I формирователя импульсов подключены к входам блока определения длины транспортных средств, выход второго счетчика и выход блока определения длины транспортных средств, соединены с входами блока коррекции, выход которого и второй выход блока определения скорости транспортных средств соеди5нены с соответствующими входами выходного блока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
0 № 551688, кл. G 08 С 1/04, 1975.
2.Авторское свидетельство СССР № 593230,кл. G 08 G 1/05, 1976 (прототип) .
/3
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения вида транспорта | 1976 |
|
SU639007A1 |
| Магнитометрический детектор транспорта | 1988 |
|
SU1608731A1 |
| Устройство для измерения скоростиТРАНСпОРТНыХ СРЕдСТВ | 1977 |
|
SU840741A1 |
| Устройство для контроля дорожногодВижЕНия | 1979 |
|
SU830492A1 |
| Устройство для учета транспортных потоков | 1977 |
|
SU775739A2 |
| Устройство для измерения пространственно-временных характеристик транспортных средств | 1980 |
|
SU918960A1 |
| Способ измерения скорости движения и длины транспортных средств | 1988 |
|
SU1649587A1 |
| Устройство для учета транспортных потоков | 1977 |
|
SU711611A1 |
| Устройство для учета транспортных потоков | 1976 |
|
SU690539A1 |
| Устройство для измерения скоростидВижЕНия ТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU817741A1 |
