Известен прибор для многократных испытаний материалов в вакууме, содержащий герметичную камеру, внутри которой номешевы нагружатель, обойма с образцами и установленный эксцентрично относительно оси обоймы с образцами индентор. Однако этим прибором нельзя определять кинетику вдавливания индентора в образец, кроме того, в нем весьма затруднительна смена нагрузок. Последнее создает существенные эксплуатационные неудобства в связи с необходимостью разборки камеры для изменения величины нагрузки с последующим созданием в ней вакуума, что снижает точность измерений в связи с нарушением режимов термостатирования и ва-куумирования.
Для улучшения эксплуатационных характеристик предлагаемый прибор снабжен управляющим механизмом, состоящим из фиксирующего, подъемного и поворотного устройств и осуществляющим регулирование нагрузки, освобождение и подъем индентора с автоматической заменой испытываемого образца.
Фиксирующее устройство предлагаемого прибора выполнено в виде кулачка и шарнирно укрепленных лапок, скользящих по торцам помещенных один в другой колоколообразных грззов. Поворотное устройство выполнено в виде храповой муфты, вводимой в зацепление с валом с .помощью фрикционной втулки. Подъемное устройство выполнено в виде ползуна с подпружиненной вилкой. Это позволяет регулировать нагрузку на образец без нарушения герметичности камеры.
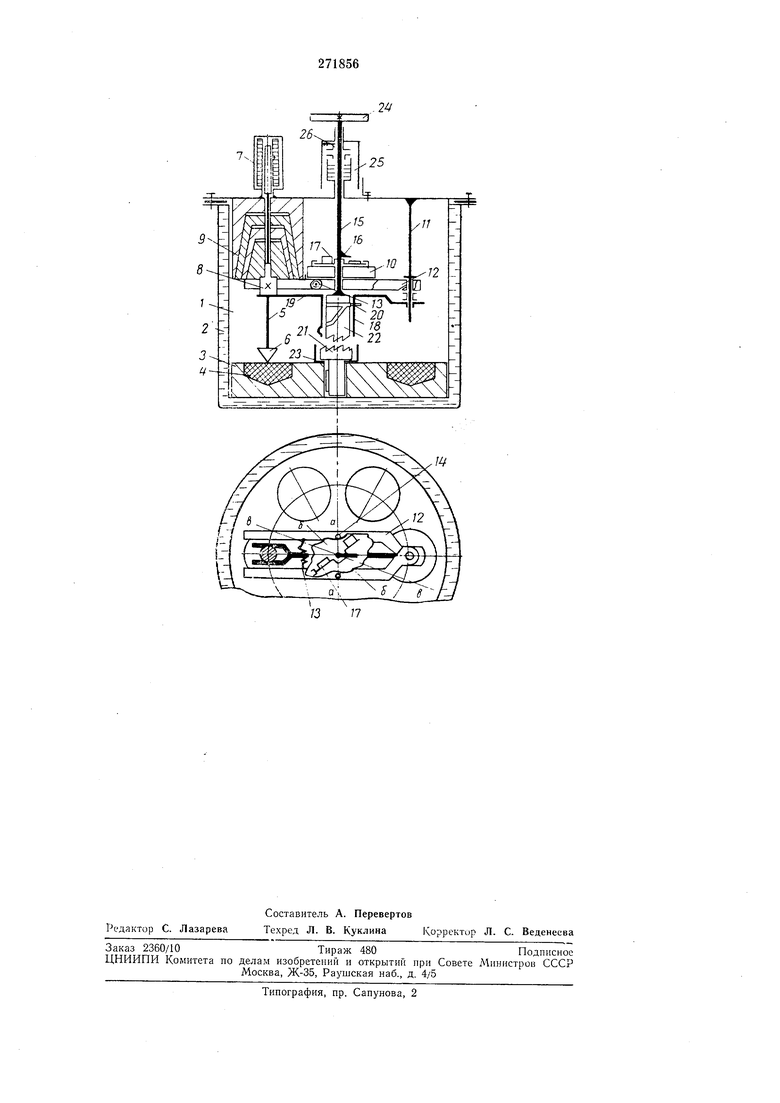
На чертелче представлен описываед ый прибор. Он содержит камеру /, термостатируемую с
помощью жидкостного или электрического обогревателя 2. На дно камеры помещается калиброванная по высоте обойма 3 с встроенными заподлицо .в ее ячейки образцами 4. Индентор 5 в нижней части оканчивается наконечником 6, имеющим коническую или иную форму. Хвостовик индентора выполнен в виде Сердечника для индуктивного датчика 7 перемещений. В средней части иидентора укреплена втулка 8, служащая для его установки в
исходном верхнем полол ении и для удержания при испытании заданной части нагружателя 9, скомплектованного из колоколообразных грузов.
Фиксирующее устройство состоит из кулачкз
10 и щарнирио укрепленных на стойке // ля:пок 12. Лапки стягиваются пружиной 13 до уиора в кулачок штифтами 14. Кулачок К приводится во вращение от вала /5 с помощью пальпа 16 через флажок-переключятель Подъемное устройство содержит ползун 18 с пружинной вилкой 19 и штифтом 20, входящим в винтовой иаз вала. Указанный иаз нереходит в верхней своей части в кольцевую нроточку. Ползун удерживается от иоворота зад- 5 ией консолью вилки, скользящей но стойке п. Поворотное устройство состоит из храновой муфты, выполнсииой из нижней 2J и верхней 22 полумуфт и фрикционной втулки 23. Ниж- 10 ияя полумуфта может свободно скользить на щнонке по отверстию обоймы 3. Верхняя полумуфта жестко укреплена на валу. Па наружном конце вала укреплен маховик 24 и установлена втулка 25, приводимая во 15 вращение с помощью собачки 2&. Па втулке 25 нанесены деления с цифрами, обозначающими величину нагрузки. В исходном положении индентор 5 нрижат к нагружателю 9 с помощью пружинной вилки 19, ползуна 18. При этом наконечник 6 находится на известном расстоянии от поверхности образца, а храповая муфта поворотного устройства разомкнута. Штифты 14 фиксирующего устройства нахо- 25 дятся в ячейках а-а и лапки 12, имея минимальный угол раствора, пересекают торцовые цлоскости всех грузов, что соответствует настройке прибора па минимальную нагрузку, воздействующую на наконечник при испытании. 30 Палец 16 вала 15 нрижат к поднятому лепестку флажка-переключателя J7. Штифт 20 ползуна находится в фиксирующей ячейке на кольцевой выточке. При необходимости увеличения нагрузки 35 маховик 24 вращают по часовой стрелке. При этом вращение маховика передается кулачку 10 через палец 16 и флажок-переключатель 17. Штифты лапок, скользя по контуру кулачка, последовательно попадают в ячейки б-б, в-в 40 и т. д., изменяя угол раствора ланок. Соответственно этому освобождаются грузы в порядке увеличения их диаметров. Одновременно с кулачком 10 вращается втулка 25 указателя, имеющая согласованную с кулачком кинематику вращения. Поворот маховика прекращают при подходе необходимой цифры к стрелке указателя. Далее маховик возвращают в исходное положение, вращая против часовой стрелки до фиксации щтифта 20 в ячейке кольцевой проточки. Для проведения замера маховик поворачивают против часовой стрелки до упора. Упругая сила пружинящей вилки вводит, щтифт 20 в 55 винтовой паз вала. Ползун 18 с вилкой 19 опускается, и цаконгчник 6 освобожденного индептора 5 под дей2045 50 ствием собственного веса и вееа незастопоренных фиксирующих устройством грузов начинает .погружаться в образец. Хвостовик индентора, перемещаясь по каналу датчика, изменяет его индуктивность, вследствие чего появляется электрический сигнал, величина которого пропорциональна глубине погружения наконечника в образец. При опускании ползуна нижняя его часть входит во фрикциопную муфту. После окончания опыта маховик поворачивают по часовой стрелке до исходного положения, которое определяется фиксацией штифта 20 ползуна в выемке кольцевой проточки вала. Пижняя нолумуфта 21, удерживаемая фрикционной втулкой 23, поднимается вверх до сцепления с верхней полумуфтой 22, которое .происходит после поворота вала на 180° в момецт выхода щтифта 20 на кольцевую проточку и возвращения индентора в верхнее исходное положение. Дальнейшее вращение вала приводит к повороту обоймы с образцами. При повороте вала ца заданный угол, а именно при подходе очередного образца под наконечник индентора 5, упругий лепесток ползуна, скользящий по поверхности вала, входит на лыску, имеющуюся на валу, и прогибается внутрь, благодаря чему фрикционная втулка освобождается и нижняя полумуфта 21, опускаясь вниз, выходит из зацепления с верхней полумуфтой 22. Предмет изобретения 1. Прибор для механических испытаний пластичных материалов, содержащий герметичную камеру, внутрь которой помещеп стол с гнездами для крепления испытуемых образцов и установленное эксцентрично и подвижно относительно стола нагрул ающее устройство, отличающийся тем, что, с целью улучшения экснлуатационных характеристик прибора, стол для образцов выполнен поворотным и связан разъемным соединением с центральным приводным валом, выведенным через неподвижную крышку камеры наружу прибора. 2. Прибор по п. 1, отличающийся тем, что, с целью регулирования нагрузки на образец без нарушения герметичности камеры, нагружающее устройство размещено внутри камеры и выполнено в виде одетых друг на друга полых конической формы грузов, насал енных на индентор и соприкасающихся своими нижними поверхностями, лежащими в одной плоскости, с расположепными по обе стороны иплентора раздвижными рычагами, стянутыми пружиной и контактирующими с кулачком, кинсматически связанным с центральным приводным валом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фрикционная муфта | 1978 |
|
SU737683A1 |
| Приспособление для компенсации деформации пунсона в приборе для испытания материалов на твердость методом давления | 1930 |
|
SU37627A1 |
| МНОГОТОЧЕЧНЫЙ ПЛАСТОМЕТР | 1971 |
|
SU322694A1 |
| Твердомер | 1979 |
|
SU945747A1 |
| Автомат для изготовления и маркировки трубчатых монтажных бирок | 1985 |
|
SU1279858A1 |
| Фрикционная муфта | 1973 |
|
SU444903A1 |
| МНОГОФУНКЦИОНАЛЬНАЯ МАШИНА ТРЕНИЯ (ВАРИАНТЫ) | 2015 |
|
RU2624992C2 |
| Рекуператор энергии транспортного средства | 1980 |
|
SU921892A1 |
| БЕСТОРМОЗНОЙ ЛЕНТОПРОТЯЖНЫЙ МЕХАНИЗМ | 1970 |
|
SU274412A1 |
| ТОРОВО-РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ "ТРД-КАН21" (ВАРИАНТЫ) | 2006 |
|
RU2327886C9 |