Изобретение относится к области машиностроения и может быть использовано при конструировании подъемно-транспортных машин.
Самоходные подъемно-транспортные машины (ПТМ) с целью увеличения опорной базы крана и разгрузки ходовой части снабжаются выносными опорами [1, стр.262-263]. После установки самоходной ПТМ на выносные опоры осуществляется выравнивание ее неповоротной рамы в горизонтальной плоскости.
Известно, например, устройство выравнивания самоходной ПТМ, содержащее четыре силовых цилиндра выносных опор, расположенных по углам неповоротной рамы, золотниковый кран управления работой силовых цилиндров и ртутный уровень [2].
Недостатком данного устройства является низкая точность выравнивания и большое время, требуемое для приведения крана в рабочее положение.
Наиболее близким по технической сущности к заявляемому устройству (прототипом) является подъемник-выравниватель [3]. Данное устройство содержит: поворотный круг, выполненный в виде двух сопрягаемых колец клиновидного сечения, четыре гидравлических цилиндра выносных опор (по два с каждой стороны - спереди и сзади) и блок управления. Коррекция угла наклона неповоротной рамы осуществляется блоком управления путем поворота клиновидных колец относительно друг друга, а также выдвижением и втягиванием штоков гидравлических цилиндров выносных опор. Команды управления поворотным кругом и гидравлическими цилиндрами формируются блоком управления по сигналам, задаваемым оператором.
Недостатком устройства является недостаточная точность выравнивания, а также то, что во время подъемных работ возникают силы, стремящиеся сместить кольца клиновидного сечения относительно друг друга, вследствие чего необходимо дополнительное устройство для создания компенсирующей силы.
Техническим результатом, на достижение которого направлено изобретение, является автоматизация процесса выравнивания самоходной ПТМ в горизонтальной плоскости, и как следствие, сокращение времени приведения крана в рабочее положение и повышение точности выравнивания.
Указанный технический результат достигается тем, что в известное устройство автоматического выравнивания самоходных подъемно-транспортных машин, содержащее четыре гидравлических цилиндра выносных опор и взаимодействующий с ними блок управления, на гидравлические цилиндры установлены датчики, реагирующие на соприкосновение штока гидравлического цилиндра с опорной поверхностью и подающие сигнал в блок управления, а на неповоротную раму взаимно перпендикулярно установлены датчики, реагирующие на ее отклонение в продольной и поперечной плоскости относительно горизонтальной поверхности и подающие сигнал в блок управления
Сущность изобретения заключается в том, что с использованием сигналов, получаемых с датчиков, происходит формирование в блоке управления команд, с помощью которых происходит автоматическое управление положением штоков гидроцилиндров до тех пор, пока значение углов отклонения неловоротной рамы в продольной и поперечной плоскости относительно горизонтальной плоскости не будет равен нулю.
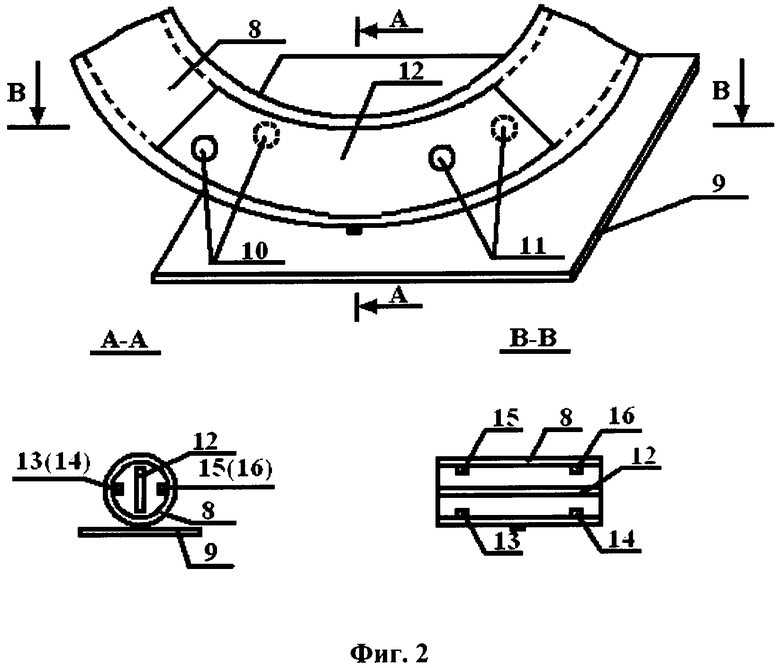
Сущность изобретения поясняется блок-схемой устройства, представленной на фиг.1, и схемой датчика (вариант), реагирующего на направление отклонения неповоротной рамы относительно горизонтальной плоскости, представленной на фиг.2.
В состав устройства автоматического выравнивания самоходных подъемно-транспортных машин входят:
датчики (1-4), реагирующие на соприкосновение штоков гидравлических цилиндров с опорной поверхностью;
датчики (5-6), реагирующие на отклонение неповоротной рамы соответственно в продольной и поперечной плоскостях относительно горизонтальной плоскости;
блок управления 7.
При этом выходы первого 1, второго 2, третьего 3, четвертого 4 датчиков соединены с соответствующими входами блока управления. Первые выходы датчика (датчик угла отклонения неповоротной рамы в продольной плоскости) 5 и датчика 6 (датчик угла отклонения неповоротной рамы в поперечной плоскости) соединены с пятым и седьмым входом, а вторые выходы - с шестым и восьмым входом блока управления соответственно.
Назначение элементов устройства ясны из их названия.
Устройство работает следующим образом. После выноса выносных опор ПТМ оператор переводит гидравлические цилиндры в режим выдвижения штоков. При соприкосновении штока с опорной поверхностью на выходе соответствующего датчика появляется сигнал, который поступает в блок управления, где формируется команда на выключение гидравлического цилиндра. По этой команде выдвижение штока гидравлического цилиндра останавливается. При соприкосновении штоков всех гидравлических цилиндров с опорной поверхностью включается режим автоматического выравнивания неповоротной рамы относительно горизонтальной поверхности. Рассмотрим режим выравнивания неповоротной рамы в одной плоскости, например, в продольной плоскости.
При отклонении неповоротной рамы относительно горизонтальной поверхности на одном из выходов датчика угла отклонения неповоротной рамы в продольной плоскости 5 появляется сигнал, который поступает в блок управления 7, где формируется команда на включение гидравлических цилиндров. Какие именно гидравлические цилиндры будут включены и на какое действие (выдвижение или втягивание штока) зависит от того, с какого выхода датчика 5 поступит сигнал в блок управления 7. Предположим, что неповоротная рама отклонена вправо и что это соответствует появлению сигнала на первом выходе датчика 5, при таком положении неповоротной рамы в блоке управления 7 будет формирована команда на втягивание штоков левой пары гидравлических цилиндров и на выдвижение - правой. При отсутствии сигнала на обоих выходах датчика 5, что соответствует выравниванию неповоротной рамы в продольной плоскости, в блоке управления 7 формируется команда на выключение гидравлических цилиндров. Аналогично осуществляется выравнивание в поперечной плоскости. Только при этом выравнивание будет происходить с помощью передних и задних пар цилиндров. Выравнивание ПТМ происходить до тех пор, пока на выходах датчиков 5 и 6 будет присутствовать сигнал. При отсутствии сигнала на выходах датчиков 5 и 6 в блоке управления 7 формируется команда на выключение гидравлических цилиндров и вырабатывается информация о завершении режима выравнивания неповоротной рамы и готовности ПТМ к работе.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известна установка на гидравлические цилиндры выносных опор самоходной ПТМ датчиков 1-4, реагирующих на соприкосновение штоков гидравлических цилиндров с опорной поверхностью и подающих сигнал в блок управления 7, а на неповоротную раму датчиков 5-6, реагирующих на ее отклонение относительно горизонтальной поверхности и подающих сигнал в блок управления.
Предлагаемое техническое решение имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что установка на гидравлические цилиндры выносных опор самоходной ПТМ датчиков 1-4, реагирующих на соприкосновение штоков гидравлических цилиндров с опорной поверхностью и подающих сигнал в блок управления 7, а на неповоротную раму датчиков 5-6, реагирующих на ее отклонение относительно горизонтальной поверхности и подающих сигнал в блок управления 7, обеспечивает автоматизацию процесса выравнивания самоходной ПТМ в горизонтальной плоскости, и как следствие, сокращение времени приведения ее в рабочее положение и повышение точности выравнивания.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование, приспособления, применяемые в машиностроении и электротехнике.
В качестве датчика, реагирующего на соприкосновение штока гидравлического цилиндра с опорной поверхностью, может быть использован, например, концевой выключатель кнопочного типа [4, стр.344], жестко закрепленный на основании штока гидравлического цилиндра.
Один из вариантов построения датчика, реагирующего на отклонение неповоротной рамы относительно горизонтальной поверхности и подающего сигнал в блок управления, показан на фиг.2. Датчик состоит из пустотелого тороидального сегмента 8, жестко закрепленного в центре тяжести на плоском основании 9. В корпусе тороидального сегмента 8 на одинаковом расстоянии относительно вертикальной к основанию 9 плоскости, проходящей через центр тяжести, слева и справа установлены две пары «светодиод-фотодиод» 10. 11. В каждой паре светодиод с фотодиодом размещены на одной оси. Между светодиодами 13, 14 и фотодиодами 15, 16 установлена шторка 12 с возможностью перемещения внутри тороидального сегмента 8 при отклонении датчика относительно горизонтальной плоскости. Выходы фотодиодов 15, 16 являются выходами датчика. При горизонтальном положении датчика шторка 12 закрывает светодиоды 13, 14 и сигнал на его выходах отсутствует. При отклонении датчика в ту или иную сторону шторка 12 перемещается в противоположную сторону и один из светодиодов открывается, а на выходе фотодиода, находящегося соосно с ним, появляется сигнал.
Блок управления может быть изготовлен с использованием логических элементов, применяемых в области радиоэлектроники.
Установка на гидравлические цилиндры выносных опор самоходной ПТМ датчиков 1-4, реагирующих на соприкосновение штоков гидравлических цилиндров с опорной поверхностью и подающих сигнал в блок управления 7, а на неповоротную раму датчиков 5-6, реагирующих на ее отклонение относительно горизонтальной поверхности и подающих сигнал в блок управления 7, обеспечивает автоматизацию процесса выравнивания самоходной ПТМ в горизонтальной плоскости и, как следствие, сокращение времени приведения ее в рабочее положение и повышение точности выравнивания.
Источники информации
1. Вайнсон А.А. Подъемно-транспортные машины. Учебник для вузов по специальности «Подъемно-транспортные, строительные, дорожные машины и оборудование». - 4-е изд., перераб. и доп. - М.: Машиностроение, 1989, стр.262-263.
2. Кран автомобильный войсковой КС-3572. Техническое описание и инструкция по эксплуатации. - М.: Ордена Трудового Красного Знамени Воениздат МО СССР, 1980.
3. Журнал «Строительные дорожные машины» №5 - М: ВНИИПИ, 1998 г., с.44.
4. Александров М.П. Грузоподъемные машины. Учебник для вузов. - М.: Изд-во МГТУ им. Н.Э.Баумана. - Высшая школа, 2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЫРАВНИВАНИЯ АЭРОДРОМНОГО ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 2014 |
|
RU2602884C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ПЛАТФОРМ АЭРОДРОМНЫХ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2582563C2 |
| УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ ПЛАТФОРМ АЭРОДРОМНЫХ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2565854C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ | 2007 |
|
RU2342310C1 |
| Гидросистема механизма выравнивания опорно-поворотного устройства гидроманипулятора лесотранспортной машины | 2021 |
|
RU2762905C1 |
| КРЕНОВО-ТАНГАЖНОЕ ОТВЕСНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2007 |
|
RU2340543C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2307784C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2556136C1 |
| УСТРОЙСТВО ВЫРАВНИВАНИЯ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2011 |
|
RU2483018C1 |
| УСТРОЙСТВО ДЛЯ БЕЗОПАСНОЙ ЭКСПЛУАТАЦИИ МОБИЛЬНОГО ПОДЪЕМНИКА | 2006 |
|
RU2306254C1 |
Изобретение относится к области машиностроения и может быть использовано при конструировании самоходных подъемно-транспортных машин. Устройство автоматического выравнивания самоходных подъемно-транспортных машин содержит четыре гидравлических цилиндра выносных опор и взаимодействующий с ними блок управления. Причем на гидравлические цилиндры установлены датчики, реагирующие на соприкосновение штока гидравлического цилиндра с опорной поверхностью и подающие сигнал в блок управления, а на неповоротную раму взаимно перпендикулярно установлены датчики, реагирующие на ее отклонение в продольной и поперечной плоскости относительно горизонтальной поверхности и подающие сигнал в блок управления. Техническим результатом изобретения является автоматизация процесса выравнивания самоходной подъемно-транспортной машины в горизонтальной плоскости и, как следствие, сокращение времени приведения крана в рабочее положение и повышение точности выравнивания. 2 ил.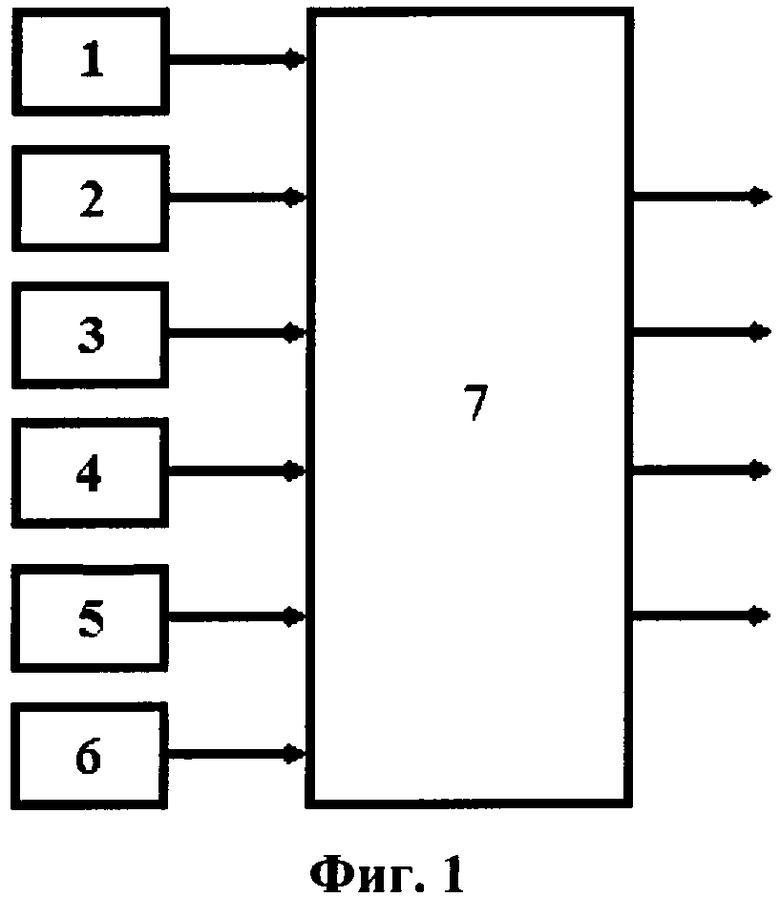
Устройство автоматического выравнивания самоходных подъемно-транспортных машин, содержащее четыре гидравлических цилиндра выносных опор и взаимодействующий с ними блок управления, отличающееся тем, что на гидравлические цилиндры установлены датчики, реагирующие на соприкосновение штока гидравлического цилиндра с опорной поверхностью и подающие сигнал в блок управления, а на неповоротную раму взаимно перпендикулярно установлены датчики, реагирующие на ее отклонение в продольной и поперечной плоскости относительно горизонтальной поверхности и подающие сигнал в блок управления.
| СПОСОБ АВТОМАТИЧЕСКОГО ГОРИЗОНТИРОВАНИЯ НЕСУЩЕЙ ПЛАТФОРМЫ С БУРОВЫМ АГРЕГАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2196893C1 |
| Шаговый искатель с общим струнным полем | 1940 |
|
SU59038A1 |
| RU 2002104444 A, 20.10.2003 | |||
| СИСТЕМА КОНТРОЛЯ ГРУЗОВОЙ УСТОЙЧИВОСТИ МОБИЛЬНЫХ ГРУЗОПОДЪЕМНЫХ МАШИН | 2004 |
|
RU2267458C1 |
| DE 19525673 C1, 02.10.1996. | |||

