Изобретение относится к электротехнике и может найти применение в быстродействующих системах регулирования с широким диапазоном регулирования скорости, в которых требуется стабилизация скорости при равномерном вращении электродвигателя.
Известно устройство для управления бесконтактным двигателем постоянного тока по RU 2023343 C1, 1994.11.15, МКИ Н02Р 6/02, содержащее мостовой коммутатор на транзисторах, датчик положения ротора, задатчик направления вращения, узел токоограничения, узел управления частотой вращения и декодер, декодер выполнен на трех инверторах и шести логических элементах ЗИ - НЕ или ЗИЛИ - НЕ.
Недостатками данного устройства являются ограниченная полоса захвата частоты и узкий диапазон стабилизируемых скоростей.
Наиболее близкой по технической сущности к предлагаемой является импульсно-фазовая система стабилизации скорости электроприводов, описанная в книге «Управление электроприводами», А.В.Башарин, В.А.Новиков, Г.Г.Соколовский, Л.: Энергоиздат, 1982, стр.181-186, включающая в себя фазовый детектор, генератор эталонной частоты, преобразователь код-частота, регулятор положения, частотный дискриминатор, нелинейный логический блок, импульсный датчик скорости, жестко связанный с валом управляемого двигателя.
Эта импульсно-фазовая система стабилизации скорости электропривода выбрана в качестве прототипа.
Задачей настоящего изобретения является повышение устойчивости и быстродействия, расширение диапазона регулирования скорости вращения электродвигателя с помощью автоматического определения момента захвата частоты и оптимизации момента переключения управления с контура автоматической синхронизации на контур фазовой автоподстройки.
Для достижения поставленной задачи в импульсно-фазовую систему стабилизации скорости электропривода, содержащую последовательно соединенные задающий генератор, частотный дискриминатор, импульсно-фазовый дискриминатор, коммутатор, электродвигатель, вал которого жестко связан с вращающимся трансформатором, используемым в качестве датчика скорости вращения электродвигателя, введен блок переключения контуров, причем выход задающего генератора соединен с первым входом частотного дискриминатора и первым входом импульсно-фазового дискриминатора, выход частотного дискриминатора соединен с первым входом блока переключения контуров, а выход импульсно-фазового дискриминатора соединен со вторым входом блока переключения контуров, выход которого соединен с входом коммутатора, выход которого соединен с двигателем, жестко связанным с вращающимся трансформатором, выход которого соединен со вторыми входами импульсно-фазового и частотного дискриминаторов.
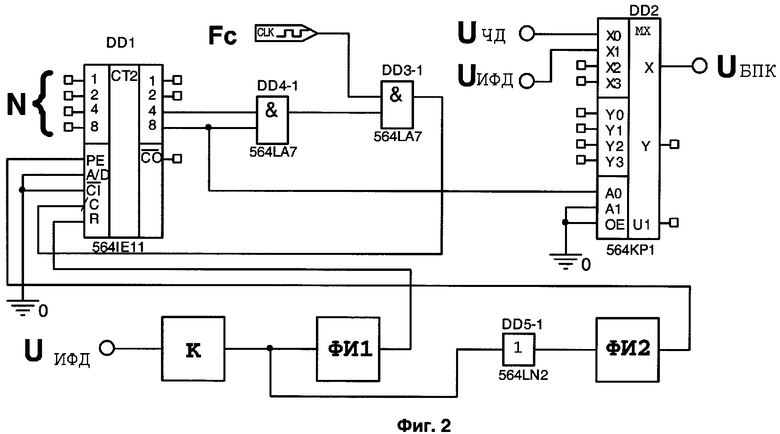
Суть изобретения поясняется чертежами, где на фиг.1 изображена блок-схема импульсной частотно-фазовой системы регулирования скорости вращения электродвигателя, на фиг.2 - принципиальная схема блока переключения контуров, на фиг.3 - эпюры напряжений импульсно-фазового дискриминатора.
Импульсная частотно-фазовая система регулирования скорости вращения электродвигателя содержит задающий генератор 1, импульсно-фазовый дискриминатор 2, частотный дискриминатор 3, блок переключения контуров 4, коммутатор 5, электродвигатель 6, вращающийся трансформатор 7, источник 8 квадратурного напряжения.
Для описания системы поясним работу частотного дискриминатора, импульсно-фазового дискриминатора и блока переключения контуров.
На один вход частотного дискриминатора 3 подается синусоидальное напряжение с частотой F3, поступающее с задающего генератора 1. На второй вход частотного дискриминатора 3 подается сигнал обратной связи с выхода вращающегося трансформатора 7, в виде синусоидального напряжения с частотой Foc. В режиме частотного сравнения сигналов F3 и Foc характеристика частотного дискриминатора 3 релейна:
при F3<Foc Uчд<0,
при F3>Foc Uчд>0.
Работа импульсно-фазового дискриминатора поясняется эпюрами напряжений, представленными на фиг.3.
В данной системе применена малоинерционная схема импульсно-фазового дискриминатора, имеющая малое содержание побочных гармоник и не требующая громоздких низкочастотных фильтров.
Импульсно-фазовый дискриминатор может иметь два состояния. В случае, когда частоты, поступающие на входы дискриминатора, отличаются друг от друга, на величину, большую, чем полоса захвата, выходным сигналом импульсно-фазового дискриминатора является сигнал ступенчатой формы и переменной полярности Uифд, показанный на фиг.3.
При захвате частоты Foc на выходе дискриминатора будет постоянное напряжение, величина которого пропорциональна величине разности фаз входных сигналов, а знак зависит от знака разности фаз.
Блок переключения контуров 4, представленный на фиг.2, работает следующим образом. Когда на вход блока переключения контуров 4 поступает с выхода импульсно-фазового дискриминатора 2 сигнал ступенчатой формы с частотой |F3-Foc|, на выходе компаратора К появляется меандр с этой же частотой, который поступает на формирователь импульсов ФИ1. С выхода формирователя импульсов ФИ1 короткие импульсы длительностью 4 мкс и частотой |F3-Fo| поступают на обнуляющий вход счетчика DD1 и на вход ФИ2. С выхода ФИ2 импульсы, сдвинутые на величину, равную длительности импульса ФИ1 (4 мкс) относительно импульсов с ФИ1, поступают на вход РЕ счетчика DD1. В результате по импульсу с ФИ1 счетчик обнуляется, а по импульсу с ФИ2 разрешается счет импульсов, поступающих на вход С. В том случае, когда на выходе счетчика DD1 в двух старших разрядах одновременно не присутствуют две логические единицы, т.е. счетчик не успевает досчитать до 15 (1,1,1,1), на выходе микросхемы DD4-1 присутствует логическая единица, поступающая на один из входов DD3-1. На другой вход DD3-1 поступают импульсы с частотой Fc. С выхода DD3-1 импульсы с частотой Fc поступают на вход С счетчика DD1. Происходит вычитание импульсов Fc из числа N, записанного на параллельном входе DD1. В старшем разряде счетчика DD1 присутствует логический ноль, который поступает на управляющий вход А0 мультиплексора DD2, запрещая прохождение сигнала Uифд с выхода импульсно-фазового дискриминатора 2 и разрешая прохождение сигнала Uчд с выхода импульсного частотно-фазового дискриминатора 3.
В случае уменьшения разности частот |F3-Foc|, т.е. увеличения периода между импульсами, поступающими на входы R и РЕ счетчика DD1, время одного цикла счета увеличивается, и в какой-то момент счетчик досчитает до 15 (1,1,1,1). В двух старших разрядах счетчика DD1 одновременно появятся две логические единицы, на выходе DD4-1 появится логический ноль, который запретит прохождение через DD3-1 импульсов частоты Fc. Счет прекратится. Число N и частота Fc выбираются таким образом, чтобы к моменту прекращения счета, т.е. к моменту появления логических единиц в двух старших разрядах DD1, произошел захват частоты, и на выходе импульсно-фазового дискриминатора появилось постоянное напряжение. Прекратится поступление обнуляющих импульсов на вход R и записывающих импульсов на вход РЕ счетчика DD1. Счетчик установится в устойчивое состояние, и в его четвертом разряде постоянно будет присутствовать логическая единица. Логическая единица в четвертом разряде счетчика DD1, поступив на управляющий вход АО мультиплексора DD2, запретит прохождение сигнала Uчд и разрешит прохождение сигнала Uифд.
Устройство работает следующим образом.
Импульсная частотно-фазовая система регулирования скорости вращения электродвигателя состоит из двух контуров управления. Это контур автоматической синхронизации, работающий с частотным дискриминатором 3, и контур фазовой автоподстройки, работающий с импульсно-фазовым дискриминатором 2. Переключение с одного контура управления на другой осуществляется с помощью блока переключения контуров 4.
Рассмотрим случай, когда разность задающей частоты и частоты обратной связи |F3-Foc| больше полосы захвата. В этом случае на выходе импульсно-фазового дискриминатора 2 присутствует переменное ступенчатое напряжение. В соответствии с логикой работы блока переключения контуров на его выход поступит напряжение Uчд. Знак этого напряжения зависит от знака разности частот |F3-Foc|. Напряжение Uчд поступает на коммутатор 5, который управляет двигателем 6. Система находится в режиме автоматической синхронизации. Происходит разгон или торможение электродвигателя 6 и, следовательно, увеличение или уменьшение частоты Foc, поступающей с вращающегося трансформатора 7. В результате частота Foc приближается к частоте F3, и разность частот |F3-Foc| начнет уменьшается. В какой-то момент блок переключения контуров 4 запретит прохождение сигнала Uчд с выхода частотного дискриминатора 3 и разрешит прохождение сигнала Uифд, поступающего с выхода импульсно-фазового дискриминатора 2.
Система переключится в режим фазовой автоподстройки, и электродвигатель будет вращаться с заданной скоростью.
Это состояние будет сохраняться до тех пор, пока разность частот |F3-Foc| не станет больше полосы захвата. Как только, в результате изменения задающей частоты F3 или воздействия возмущающих факторов на вал электродвигателя, разность частот |F3-Foc| станет больше полосы захвата, процесс повторится.
В случае, когда задающая частота F3 равна опорной частоте Fo, скорость вращения двигателя будет равна нулю. Это происходит следующим образом. Вращающийся трансформатор 7, соединенный с валом электродвигателя 6, запитывается квадратурным напряжением, формируемым источником квадратурного напряжения 8, с опорной частотой Fo. Вращающийся трансформатор 7 работает в режиме фазовращателя. На его выходной обмотке будет присутствовать частота:

где Fo - частота источника квадратурных напряжений;
ωвр - частота вращения двигателя.
Как видно из формулы (1), когда ωвр=0, Foc=Fo, т.е. на вход импульсно-фазового дискриминатора 2 подаются равные частоты F3=Fo и Foc=Fo. В этом случае на выходе импульсно-фазового дискриминатора 2 будет присутствовать напряжение Uифд=0, поступающее на вход блока переключения контуров 4. Тогда на выходе блока переключения контуров 4 появляется напряжение Uифд=0, которое в качестве управляющего напряжения поступает на вход коммутатора 5. Электродвигатель 6 будет оставаться в покое.
Частота Fc и число N выбираются в зависимости от полосы захвата и динамических свойств системы так, чтобы к моменту переключения на контур фазовой автоподстройки система находилась в режиме устойчивого удержания. Оптимальный выбор частоты Fc и числа N позволяет адаптировать схему управления под конкретные динамические параметры системы.
Коммутатор 5 и источник 8 квадратурных напряжений принципиальных особенностей не имеют.
Устойчивость и быстродействие системы повышается за счет оптимального момента переключения управления с контура автоматической синхронизации на контур фазовой автоподстройки, которое происходит не в момент, когда частота Foc сравнивается с частотой F3, как это происходит в прототипе, а в момент, когда система находится в режиме устойчивого удержания. Диапазон скоростей управления электродвигателем расширяется за счет возможности выбора оптимальной коррекции системы и отсутствия инерционных низкочастотных фильтров.
Введение в систему блока переключения контуров позволило, за счет автоматического определения момента захвата частоты и оптимизации момента переключения управления с контура автоматической синхронизации на контур фазовой автоподстройки, значительно повысить устойчивость и быстродействие системы, снизить требования к коррекции системы и расширить диапазон регулирования скорости вращения электродвигателя от сверхнизких скоростей (0,01 Гц) до высоких (10000 Гц).
Из известных заявителю патентно-информационных материалов не обнаружены признаки, сходные с совокупностью признаков заявляемого объекта.
Данное устройство испытано на макетном образце. Результаты испытаний свидетельствуют о достижении поставленной задачи. ФГУП НПОПМ предполагает использовать это техническое решение на штатных изделиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2510126C2 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608177C2 |
| Стабилизированный электропривод | 1989 |
|
SU1624649A1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475932C1 |
| Фазочастотная следящая система | 1986 |
|
SU1409969A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2462809C1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
| МОДУЛЬ СБОРА ДАННЫХ | 2008 |
|
RU2374683C1 |
| Электропривод постоянного тока | 1980 |
|
SU928575A1 |

Изобретение относится к области электротехники и может быть использовано в быстродействующих системах регулирования с широким диапазоном регулирования скорости, в которых требуется стабилизация скорости при равномерном вращении электродвигателя. Техническим результатом является повышение устойчивости и быстродействия, снижение требований к коррекции и расширение диапазона регулирования скорости вращения электродвигателя. В импульсную частотно-фазовую систему регулирования скорости вращения электродвигателя введен блок переключения контуров. Это позволило автоматически определять момент захвата частоты и оптимизировать момента переключения управления с контура автоматической синхронизации на контур фазовой автоподстройки и обеспечить указанный технический результат, расширяя при этом диапазон вращения электродвигателя от сверхнизких скоростей (0,01 Гц) до высоких скоростей (10000 Гц). 3 ил.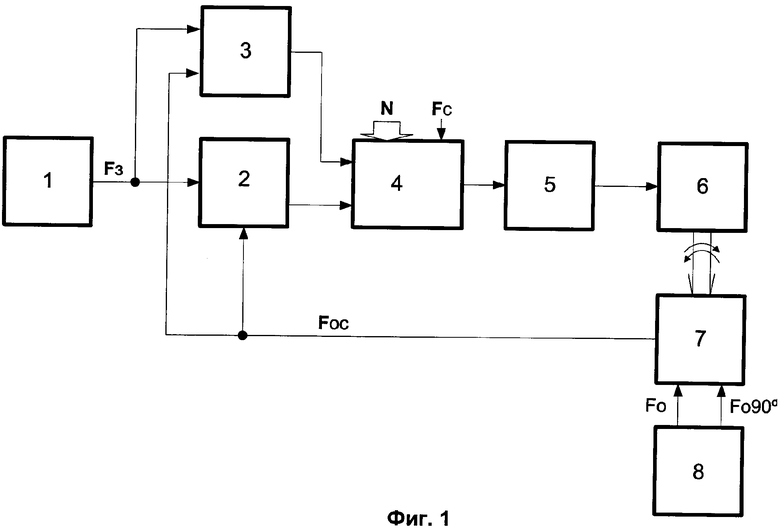
Импульсная частотно-фазовая система регулирования скорости вращения электродвигателя, содержащая последовательно соединенные задающий генератор, частотный дискриминатор, импульсно-фазовый дискриминатор, коммутатор, двигатель, вал которого жестко связан с вращающимся трансформатором, используемым в качестве датчика скорости вращения двигателя, отличающаяся тем, что в нее введен блок переключения контуров, причем выход задающего генератора соединен с первым входом частотного дискриминатора и первым входом импульсно-фазового дискриминатора, выход частотного дискриминатора соединен с первым входом блока переключения контуров, а выход импульсно-фазового дискриминатора соединен со вторым входом блока переключения контуров, выход которого соединен со входом коммутатора, выход которого соединен с двигателем, жестко связанным с вращающимся трансформатором, выход которого соединен со вторыми входами импульсно-фазового и частотного дискриминаторов.
| БАШАРИН А.В | |||
| и др | |||
| Управление электроприводами | |||
| - Л.: Энергоиздат, 1982, с.181-186 | |||
| RU 2005137628 A, 10.06.2007 | |||
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2260897C2 |
| Электропривод | 1987 |
|
SU1453569A1 |
| Электропривод | 1989 |
|
SU1695477A1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА РАБОЧЕГО ОРГАНА ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1967 |
|
SU214416A1 |
| US 3588645 A1, 15.07.1971 | |||
| DE 10315596 A1, 14.10.2004 | |||
| JP 2006280141 F1, 12.10.2006 | |||
| Керамическая масса | 1983 |
|
SU1151527A1 |
| WO 9952201 A, 14.10.1999. | |||

