to ю
NU
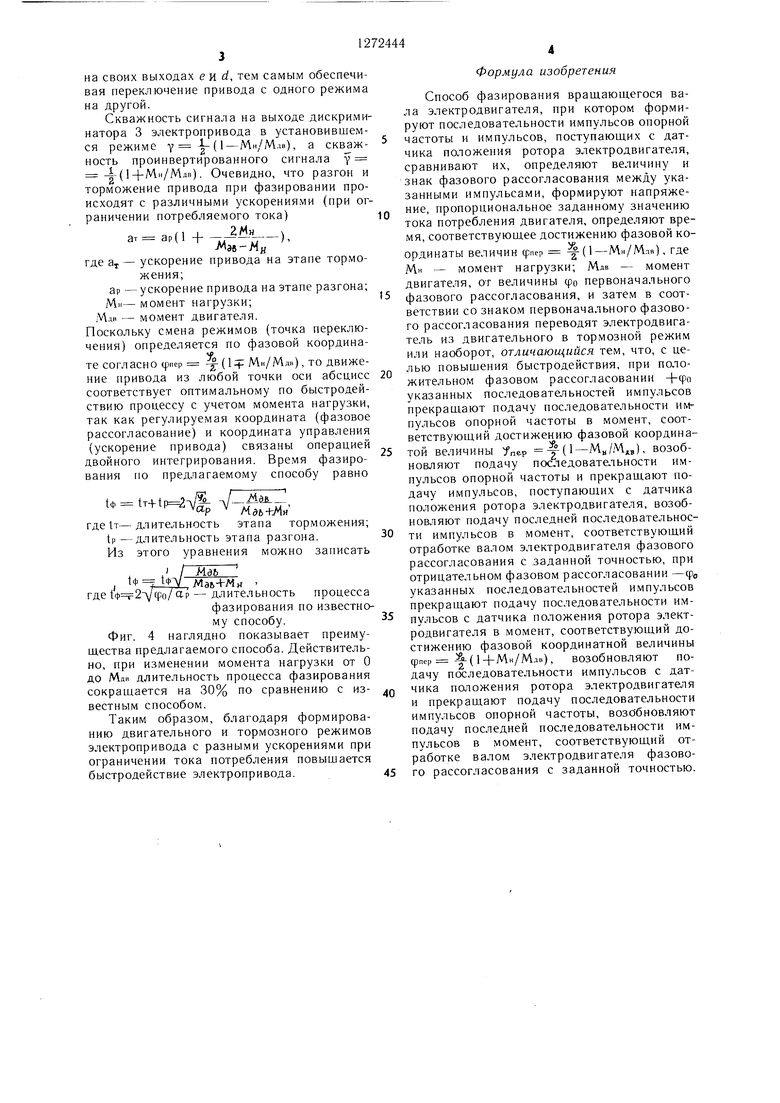
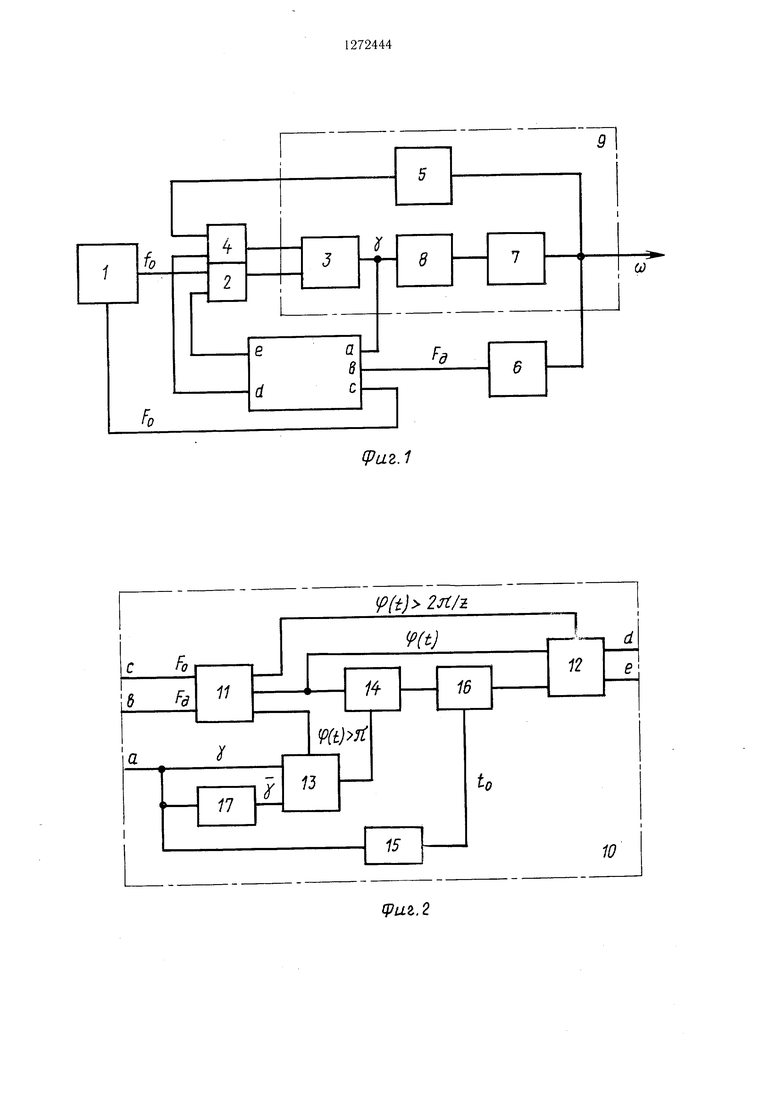
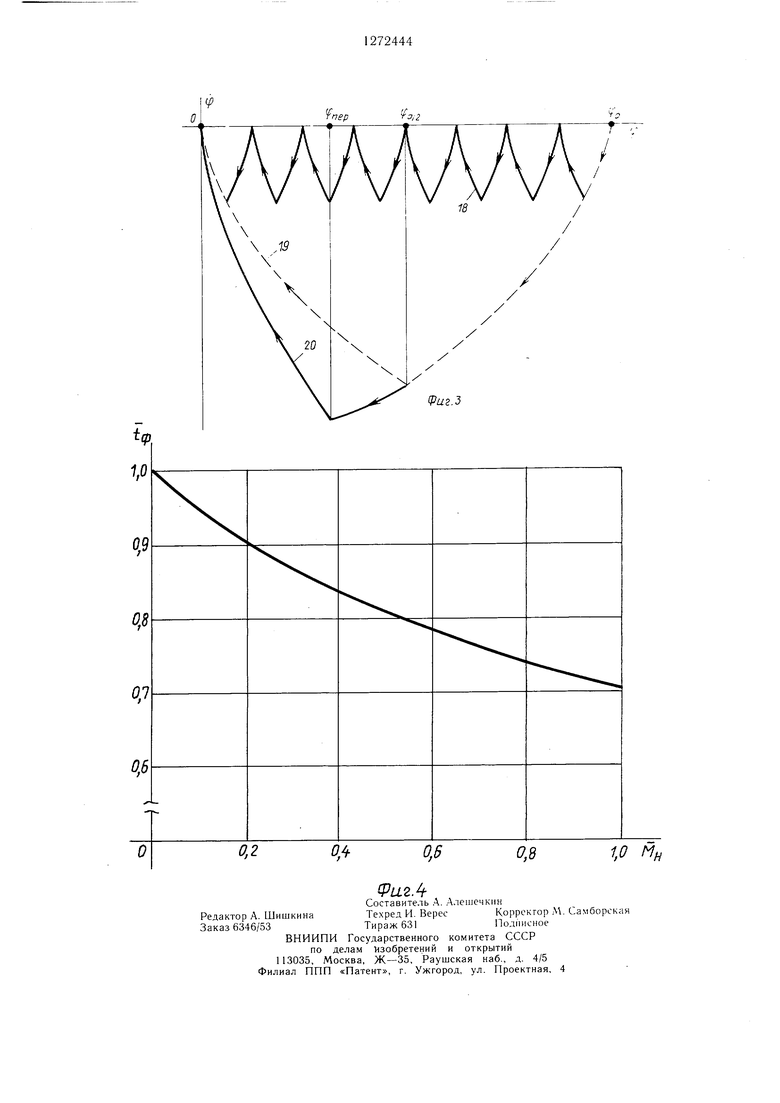
4 4 Изобретение относится к электротехнике и может быть использовано в прецизионных автоматизированных электроприводах. Цель изобретения - повышение быстродействия электропривода. На фиг. 1 представлена структурная схема электропривода, реализующего предлагаемый -способ; на фиг. 2 - структурная схема блока определения фазоого рассогласования; на фиг. 3 - фазовые .ии движения привода для известн-fx и предлагаемых способов; на фиг. 4 - зависимость относительного времени фазирования от относительного момента нагрузки двигателя. Электропривод содержит (фиг. 1) опорный генератор 1, подключенный к одному входу первого логического элемента 2 совпадения, выход которого соединен с одним входом импульсного частотно-фазового дискриминатора 3, другой вход которого подключен к выходу второго логического элемента 4 совпадения. К первому входу второго логического элемента 4 подключен выход .импульсного датчика 5 частоты, который вместе с датчиком 6 положения установлен на валу двигателя 7. Последовательно соединенные импульсный частотно-фазовый дискриминатор 3, усилительно-корректирующее устройство 8, двигатель 7 и датчик 5 образуют контур 9 фазовой автоподстройки частоты вращения.двигателя 7, который замыкается или размыкается блоком 10 определения фазового рассогласования по сигналам с дополнительного выхода опорного генератора 1 FO, датчика Рд и с выхода дискриминатора 3 у через элементы 2 и 4 путем их блокировки. Первый вход блока 10 определения фазового рассогласования подключен к выходу датчика 6 положения, второй - к другому выходу опорного генератора 1, третий - к выходу дискриминатора 3, а два выхода блока 10 подключены к другим входам логических элементов 2 и 4. Блок 10 (фиг. 2) определения фазового рассогласования содержит логический блок 11, элемент 12 сравнения, управляемый ключ 13, вычислительный блок 14, блок 15 индикации синхронизации, запоминающий элемент 16, логический элемент НЕ 17. Два входа логического блока 11 образуют первый и второй входы блока 10 определения фазового рассогласования. Первый вход управляемого ключа 13, вход логического элемента НЕ 17 и блока 15 индикации синхронизации образуют третий вход блока 10 определения фазового рассогласования. Выход логического элемента НЕ 17 подключен к второму входу управляемого ключа 13, выход которого подключен к управляющему входу вычислительного блока 14, а вход последнего подключен к первому выходу логического блока 11 (первому входу элемента 12 сравнения, два выхода которого образуют выходы блока 10 определения фазового рассогласования). Второй выход логического блока 11 подключен к второму входу элемента 12 сравнения, третий выход логического блока 11 подключен к третьему входу управляемого ключа 13. Выход вычислительного блока 14 через запоминающий элемент 16 подключен к третьему входу элемента 12 сравнения, управляющий вход запоминающего элемента 16 подключен к выходу блока 15 индикации синхронизации. Кривые 18 и 19 иллюстрируют движение привода по известным способам, кривая 20 - по предлагаемому способу. Электропривод работает следующим образом. Опорный генератор 1 подает синхроимпульсы частоты fo через открытый элемент 2 на первый вход дискриминатора 3 и опорные импульсы фазирования частоты FO, равной заданной частоте вращения электродвигателя 7, на первый вход блока 10 определения фазового рассогласования. До начала фазирования сигналы на обоих выходах блока 10 открывают логические элементы 2 и 4, через которые замыкается контур 9 фазовой автоподстройки частоты вращения двигателя 7. Логический блок 11 (фиг. 2) определяет текущее фазовое рассогласование ф(1) опорных импульсов частоты FO и выходных импульсов датчика 6 положения частоты Рд, поступающих на его второй вход, а запоминающий элемент 16 в момент выдачи команды блоком 15 индикации синхронизации запоминает его с коэффициентом, определяемым вычислительным блоком 14 по сигналу с дискриминатора 3 (Y или у). В момент начала фазирования to, определяемый блоком 15, логический блок 11 формирует сигнал, определяющий направление отработки приводом начального фазового рассогласования и подает его на элемент 12 сравнения и управляемый ключ 13, который пропускает сигнал Y или у на один вход вычислительного блока 14. При фазовом рассогласовании импульсов частот Ро и Рд, не превышающем л, сигнал на выходе логического блока 11 обеспечивает в первую очередь блокировку прохождения на дискриминатор 3 частотного сигнала foe, а затем fo и выдачу в вычислительный блок 14 сигнала Y. что соответствует сначала разгону, а затем торможению привода. В противном случае () сперва блокируется сигнал fo, затем foe и в вычислительный блок 14 выдается сигнал Y что соответствует последовательным во времени режимам торможения и разгона в процессе фазирования электропривода. Инвертирование сигнала дискриминатора 3-у обеспечивает логический элемент 17. Далее элемент 12 сравнения сравнивает текущее значение фазовой ошибки ф(1) со значением, находящимся в запоминающем элементе 16 (фо7 или фо) и в момент их равенства инвертирует сигналы на своих выходах е и d, тем самым обеспечивая переключение привода с одного режима на другой. Скважность сигнала на выходе дискрими натора 3 электропривода в установившемся режиме 7(1-Мн/Млв), а скважность проинвертированного сигнала Y -|(1+Мн/Мдв). Очевидно, что разгон и торможение привода при фазировании происходят с различными ускорениями (при ог раничении потребляемого тока) ат ар(1 -f ), Mst-Mi, где BT-ускорение привода на этапе торможения;ар -ускорение привода на этапе разгона; Ми- момент нагрузки; Мдв - момент двигателя. Поскольку смена режимов (точка переключения) определяется по фазовой координате согласно фпер --|-(l:f Мн/Мдв), то движение привода из любой точки оси абсцисс соответствует оптимальному по быстродействию процессу с учетом момента нагрузки, так как регулируемая координата (фазовое рассогласование) и координата управления (ускорение привода) связаны операцией двойного интегрирования. Время фазирования по предлагаемому способу равно 1ф tr-ftp A/f- . Мзь-ьМя где IT-длительность этапа торможения; tp-длительность этапа разгона. Из этого уравнения можно записать -i ,Маь4-Мя . где t0 f 2/Фо/ар - длительность процесса фазирования по известному способу. Фиг. 4 наглядно показывает преимущества предлагаемого способа. Действительно, при изменении момента нагрузки от О до Мдв длительность процесса фазирования сокращается на 30% по сравнению с известным способом. Таким образом, благодаря формированию двигательного и тормозного режимов э.тектропривода с разными ускорениями при ограничении тока потребления повыщается быстродействие электропривода. Формула изобретения Способ фазирования вращающегося вала электродвигателя, при котором формируют последовательности импульсов опорной частоты и импульсов, поступающих с датчика положения ротора электродвигателя, сравнивают их, определяют величину и знак фазового рассогласования межДу указанными импульсами, формируют напряжение, пропорциональное заданному значению тока потребления двигателя, определяют время, соответствующее достижению фазовой координаты величин фпер -|-(1-Мн/Мдй), где Мн - момент нагрузки; Мдв - момент двигателя, от величины фо первоначального фазового рассогласования, и затем в соответствии со знаком первоначального фазового рассогласования переводят электродвигатель из двигательного в тормозной режим или наоборот, отличающийся тем, что, с целью повыщения быстродействия, при положительном фазовом рассогласовании -(-фо указанных последовательностей импульсов прекращают подачу последовательности импульсов опорной частоты в момент, соответствующий достижению фазовой координатой величины Vnep -у(1-М„/М„), возобновляют подачу последовательности импульсов опорной частоты и прекращают подачу импульсов, поступаюп.их с датчика положения ротора электродвигателя, возобновляют подачу поСочедней последовательности импульсов в момент, соответствующий отработке валом электродвигателя фазового рассогласования с заданной точностью, при отрицательном фазовом рассогласовании -фо указанных последовательностей импульсов прекращают подачу последовательности импульсов с датчика положения ротора электродвигателя в момент, соответствующий достижению фазовой координатной величины фпер ( 1-1-Мн/Мдв), возобнов,дяют подачу последовательности импульсов с датчика положения ротора электродвигателя и прекращают подачу последовательности импульсов опорной частоты, возобновляют подачу последней последовательности импульсов в момент, соответствующий отработке валом электродвигателя фазового рассогласования с заданной точностью.
fpaz.l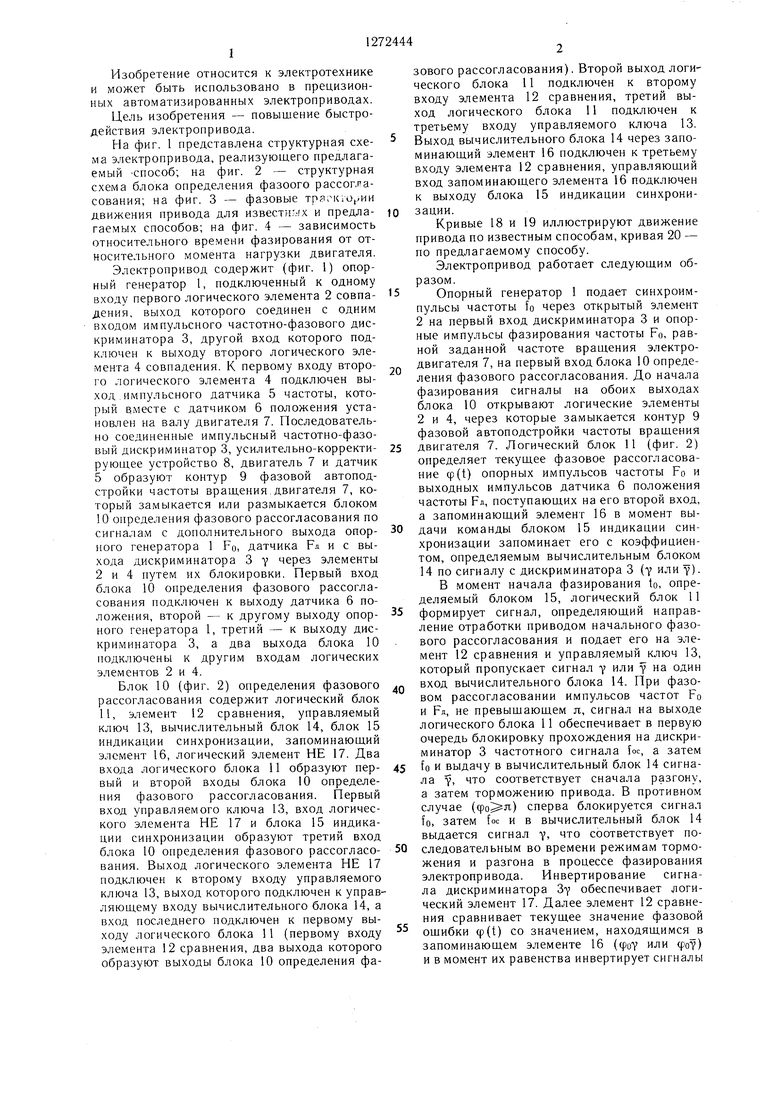
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2649307C1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608177C2 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475932C1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Способ фазирования вращающегося вала электродвигателя | 1982 |
|
SU1106000A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1989 |
|
SU1612368A1 |
| Устройство для управления многодвигательным электроприводом | 1984 |
|
SU1220098A1 |
| Способ фазирования вращающегося вала электродвигателя | 1973 |
|
SU738079A1 |
Изобретение относится к электротехнике и может быть использовано в прецизионных автоматизированных электроприводах. Цель изобретения - повышение быстродействия. Для этого определяют фазовое рассогласование, снижают его до заданной величины и затем переводят двигатель в тормозной режим. В этом режиме прекращают в зависимости от знака фазового рассогласования последовательность импульсов от генератора опорной частоты или от датчика положения ротора. При достижении заданной точности ошибки по фазе возобновляют подачу прерванной последовательности импульсов. Далее указанные операции повторяют до достижения заданной точности фазового рассогласования. 4 ил.
(Puz.2
i
| Устройство для стабилизации скорости и фазы вращения ротора электродвигателя постоянного тока | 1979 |
|
SU921012A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ фазирования вращающегося вала электродвигателя | 1982 |
|
SU1106000A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
