Изобретение относится к автоматике и может быть использовано в фазовых системах аштоматического управления и регулирования, в которых тре- буется стабилизация скорости на ин- франизких скоростях при равномерном вращении.
Цель изобретения - расширение скоростного диапазона фазочастотной следящей системы.
Расширение скоростного диапазона следящей системы в области низких скоростей обеспечивается за счет использования дополнительной функции импульсно-фазового детектора как датчика разностной частоты задающего генератора (опорной частоты FC) и частоты вращения двигателя . .
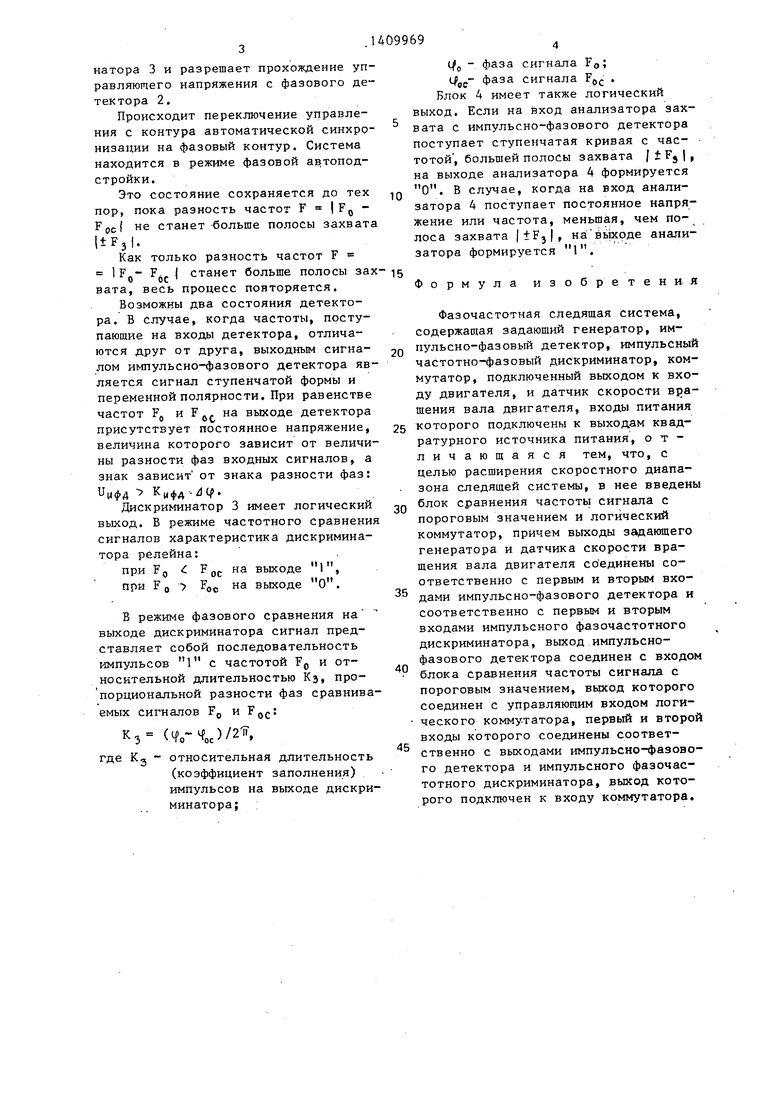
На чертеже приведена блок-схема предлагаемой фазочастотной следящей системы.
Система содержит задающий генератор 1, импул-ьсно-фазовый детектор 2, импульсный частотно-фазовый диск- риминатор 3, блок А сравнения.частоты сигнала с пороговым значением, логический коммутатор 5, ко1- мутатор 6 двигателя, датчик 8 скорости вращения вала двигателя и квадратурный источник 9 питания.
Предлагаемая фазочастотная следящая система является двухконтурной. Она состоит из фазового контур.а и контура автоматической синхрониза- ции.
Система работает следующим образом.
В переходных режимах, т.е. в мо- мент запуска двигателя или при изменении частоты задающего генератора FQ, а также при воздействии возмущающих факторов, когда F - частот задающего генератора - отличается от частоты Fg., поступающей с датчика 8 скорости вращения, на величину большую, чем полоса захвата, включен контур автоматической синхронизации. Двигатель находится в режиме разгона или торможения. Когда разница частот F.g И Fjjj. становится меньще полосы захвата, включен фазовый контур. Система в этом случае работает в режиме фазовой автоподстройки.
Переключение с одного контура на другой осуществляется за счет использования дополнительной функции импульсно-фазового детектора - функции
с
0
переменного сигнала F -FOC при выходе из полосы захвата.
Рассмотрим рабо.ту системы более подробно.
Когда разница частот F и больше полосы захвата, с выхода импульсно-фазового детектора 2 на входы блока 4 и погического коммутатора 5 поступает переменное ступенчатое напряжение с частотой Fфд - iFo - FoJ.
С выхода импульсного частотно- фазового дискриминатора 3 в этом случае на вхрд логического коммутатора 5 поступает логическая 1 или О в зависимости от знака разности частот FP и Fj,j.
При поступлении переменного напряжения на блок 4 на его выходе формируется О, который поступает на коммутатор 5, запрещая прохождение сигнала с импульсно-фазового детектора 2 и разрешая прохождение сигнала с импульсного частотно-фазового дискриминатора 3. В логическом импульсе 5 управляющий сигнал, поступающий с импульсного частотно-фазового дискриминатора 3 в виде О или 1, преобразуется в аналоговое напряжение tUy . Знак этого напряжения зависит от Знака разности частот IF5)- Fpcl т.е. от того,какой сигнал присутствует на выходе импульсного частотно-фазового дискриминатора 3 - О или 1.
Постоянное напряжение tUy посту- пает на коммутатор 6, который управляет двигателем 7. Происходит разгон или торможение двигателя, а следова тельно, увеличение или уменьщение частоты Fpc, поступающей с датчика 8 на импульсно-фазовьй детектор и импульсный частотно-фазовьш дискриминатор. В результате приближения частоты обратной связи к опорной частоте F разность этих частот уменьщается. В какой-то момент разница частот FP-FQ | становится меньшей полосы захвата |±Fj|, т.е. происходит захват частоты, и на выходе фазового дискриминатора 2 появляется постоянное напряжение определенной полярности.
На выходе блока 4 появляется 1, которая поступает на управляющий вход логического коммутатора 5, запрещает прохождение сигнала с импульсного частотно-фазового дискриминатора 3 и разрешает прохождение управляющего напряжения с фазового детектора 2,
Происходит переключение управления с контура автоматической синхронизации на фазовый контур. Система находится в режиме фазовой ащтопод- стройки.
Это состояние сохраняется до тех пор, пока разность частот F | F - Fpcf не станет -больше полосы захват
| РЗ|Как только разность частот F iFp- Fj I станет больше полосы завата, весь процесс повторяется.
Возможны два состояния детектора. В случае, когда частоты, поступающие на входы детектора, отличаются друг от друга, выходным сигналом импульсио-фазового детектора является сигнал ступенчатой формы и переменной полярности. При равенстве частот FJ к F f на выходе детектора присутствует постоянное напряжение, величина которого зависит от величины разности фаз входных сигналов, а знак зависит от знака разности фаз: К„фд .J(;.
Дискриминатор 3 имеет логический выход. В режиме частотного сравнения сигналов характеристика дискриминатора релейна:
при F, С F Qp на выходе I,
при F о FOP на выходе О.
В режиме фазового сравнения на выходе дискриминатора сигнал представляет собой последовательность импульсов 1 с частотой F и относительной длительностью Kj, про- порциональной разности фаз сравниваемых сигналов Fp и
3 (Ро-%с)/21.
где Kg - относительная длительность (коэффициент заполнения) импульсов на выходе дискриминатора; :
iff, - фаза сигнала F,;
i,g- фаза сигнала F, . Блок 4 имеет также логический выход. Если на вход анализатора зах- вата с импульсно-фазового детектора поступает ступенчатая кривая с частотой , большей полосы захвата | iFj|, на выходе анализатора 4 формируется О, В случае, когда на вход анализатора 4 поступает постоянное напряжение или частота, меньшая, чем полоса захвата |±Fjj, на вьЬсоде анализатора формируется 1.
Формула изобретения
Фазочастотная следящая система, содержащая задаюший генератор, импульсно-фазовый детектор, импульсный частотно-фазовый дискриминатор, коммутатор, подключенный выходом к входу двигателя, и датчик скорости вращения вала двигателя, входы питания
которого подключены к выходам квадратурного источника питания, отличающаяся тем, что, с целью расширения скоростного диапазона следящей системы, в нее введены
блок сравнения частоты сигнала с пороговым значением и логический коммутатор, причем выходы задающего генератора и датчика скорости вращения вала двигателя со единены соответственно с первым и вторым входами импульсно-фазового детектора и соответственно с первым и вторым входами импульсного фазочастотного дискриминатора, выход импульсно- фазового детектора соединен с входом блока срашнения частоты сигнала с пороговым значением, выход которого соединен с управляющим входом логического коммутатора, первый и второй входы которого соединены соответственно с выходами импульсно-фазового детектора и импульсного фазочастотного дискриминатора, выход которого подключен к входу коммутатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНАЯ ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2342762C1 |
| ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2011 |
|
RU2510126C2 |
| Частотный дискриминатор | 1981 |
|
SU1140224A1 |
| СПОСОБ УВЕЛИЧЕНИЯ ПОЛОСЫ ЗАХВАТА СИСТЕМЫ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ С ЗНАКОВЫМ ЛОГИЧЕСКИМ ФАЗОВЫМ ДИСКРИМИНАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2582878C1 |
| Следящий фильтр-демодулятор | 1982 |
|
SU1095358A1 |
| ФАЗОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407276A1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ РАДИОЭЛЕКТРОННЫМ СИСТЕМАМ УПРАВЛЕНИЯ | 2012 |
|
RU2483341C1 |
| Синхронизируемый вентильный электродвигатель | 1985 |
|
SU1317581A1 |
| Преобразователь кода в скорость вращения вала | 1988 |
|
SU1599991A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1998 |
|
RU2158937C2 |
Изобретение относится к автоматике. Цель изобретения - расширение скоростного диапазона следящей системы. Возможность регулирования скорости на более низких скоростях обеспечивается за счет использования-дополнительной функции импульсно-фа- зового детектора. Точность стабилизации и КПД системы повышены за счет применения в системе импульсно-фазо- вого детектора с линейным законом регулирования в зоне захвата, т.е. исключения режима прерьюистых токов. 1 ил. , 
| Система автоматического регулирования скорости вращения двигателя | 1972 |
|
SU446023A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Башарин А.В | |||
| и др | |||
| Управление электроприводами | |||
| Л.; Энергоиздат, 1982, с | |||
| Упругое экипажное колесо | 1918 |
|
SU156A1 |
