Изобретение относится к электротехнике и может быть использовано в системах передачи и воспроизведения информации.
Известен способ фазирования вращающегося вала электродвигателя (А.с. СССР №1272444 от 23.11.1986 г., МПК Н02Р 6/06, 1986 г.), при котором формируют последовательность импульсов опорной частоты fОП с опорного генератора, формируют последовательность импульсов с импульсного датчика частоты, расположенного на валу электродвигателя fOC, сравнивают последовательности импульсов частот fОП и fОС и определяют величину фазового рассогласования γ=Δϕ, формируют последовательность импульсов FОС, поступающих с датчика положения ротора электродвигателя, формируют последовательность импульсов фазирования FОП на выходе опорного генератора, сравнивают их, определяют величину и знак углового рассогласования Δϕ между указанными импульсами, формируют напряжение, пропорциональное заданному значению тока потребления двигателя, определяют время, соответствующее достижению фазовой координаты величин ϕпер=(ϕ0/2)(1-Мн/Мдв), где Мн - момент нагрузки, Мдв - момент двигателя, от величины ϕ0 первоначального фазового рассогласования, в соответствии со знаком первоначального фазового рассогласования переводят электродвигатель из двигательного в тормозной режим или наоборот, при этом при положительном фазовом рассогласовании Δϕ указанных последовательностей импульсов прекращают подачу последовательности импульсов опорной частоты в момент, соответствующий достижению фазовой координатой величины ϕпер=(ϕ0/2)(1-Мн/Мдв), возобновляют подачу последовательности импульсов опорной частоты и прекращают подачу импульсов, поступающих с датчика положения ротора электродвигателя, возобновляют подачу последней последовательности импульсов в момент, соответствующий отработке валом электродвигателя фазового рассогласования с заданной точностью, а при отрицательном фазовом рассогласовании Δϕ указанных последовательностей импульсов прекращают подачу последовательности импульсов с датчика положения ротора электродвигателя в момент, соответствующий достижению фазовой координатной величины ϕпер=(ϕ0/2)(1-Мн/Мдв), затем возобновляют подачу последовательности импульсов с датчика положения ротора электродвигателя и прекращают подачу последовательности импульсов опорной частоты, возобновляют подачу последней последовательности импульсов в момент, соответствующий отработке валом электродвигателя фазового рассогласования с заданной точностью.
Устройство для реализации данного способа содержит опорный генератор, подключенный к одному входу первого логического элемента И, выход которого соединен с одним входом импульсного частотно-фазового дискриминатора, другой вход которого подключен к выходу второго логического элемента И, к первому входу которого подключен выход импульсного датчика частоты, который вместе с датчиком положения установлен на валу двигателя, при этом последовательно соединенные импульсный частотно-фазовый дискриминатор, усилительно-корректирующее устройство, двигатель и датчик образуют контур фазовой автоподстройки частоты вращения двигателя, который замыкается или размыкается блоком определения фазового рассогласования по сигналам с дополнительного выхода опорного генератора, датчика положения и с управляющего выхода дискриминатора через логические элементы И путем их блокировки, первый вход блока определения фазового рассогласования подключен к выходу датчика положения, второй - к другому выходу опорного генератора, третий - к выходу дискриминатора, а два выхода блока определения фазового рассогласования подключены к другим входам логических элементов.
Недостатком данного способа и устройства для его осуществления является низкое быстродействие.
Наиболее близким к заявляемому изобретению является способ (Пат. РФ №2475932 от 14.09.2013, МПК Н02Р 5/52, G05D 13/62), при котором формируют последовательности импульсов частоты fОП с опорного генератора и импульсов fOC с импульсного датчика частоты, расположенного на валу электродвигателя, сравнивают fОП и fOC и определяют величину фазового рассогласования γ=Δϕ, формируют напряжение, пропорциональное току потребления двигателя, формируют последовательности импульсов FОС, поступающих с датчика положения ротора электродвигателя и импульсов фазирования FОП на выходе опорного генератора, сравнивают FOC и FОП и определяют величину углового рассогласования Δα, формируют на выходе импульсного частотно-фазового дискриминатора два дополнительных сигнала в моменты времени прихода двух импульсов частоты fOП между двумя соседними импульсами частоты fOC и при отсутствии импульсов частоты fOП между двумя соседними импульсами частоты fOC определяют величину частотного рассогласования Δf импульсов частот fOП и fOC путем подсчета импульсов частоты fOП между двумя соседними импульсами дополнительных сигналов, сформированных на выходе импульсного частотно-фазового дискриминатора, и при достижении ею заданного положительного значения прекращают подачу импульсов f0П, переводят двигатель из двигательного в тормозной режим, причем в момент времени, определяемый на основе обработки полученных начальных значений величин углового рассогласования Δαн и частотного рассогласования Δωн, возобновляют подачу импульсов fОП, причем при достижении заданного отрицательного значения частотного рассогласования прекращают подачу импульсов fOC и переводят двигатель из тормозного в двигательный режим, в момент времени, определяемый на основе обработки полученных значений Δωн и Δαн, возобновляют подачу импульсов fOC.
Устройство для реализации данного способа фазирования вращающегося вала электродвигателя содержит электродвигатель, на валу которого расположен импульсный датчик частоты вращения, выход которого подключен к первому входу второго элемента И, и датчик положения, выход которого подключен к четвертому входу блока определения фазового рассогласования, опорный генератор, к первому выходу которого подключен первый вход первого логического элемента И, пятый вход блока определения фазового рассогласования, а второй выход опорного генератора подключен к первому входу блока определения фазового рассогласования, выходы которого подключены ко вторым входам логических элементов И, которые подключены к первому и второму входам импульсного частотно-фазового дискриминатора, второй и третий выходы которого подключены ко второму и третьему входам блока определения фазового рассогласования, а первый выход - к усилительно-корректирующему устройству, к которому последовательно подключен электродвигатель, при этом выход блока определения частотного рассогласования подключен к шестому входу блока определения фазового рассогласования, к первому входу блока определения частотного рассогласования подключен первый выход опорного генератора, а ко второму и третьему входам - второй и третий выходы импульсного частотно-фазового генератора соответственно, при этом последовательно соединенные импульсный частотно-фазовый дискриминатор, усилительно-корректирующее устройство, двигатель и датчик образуют контур фазовой автоподстройки частоты вращения двигателя, который замыкается или размыкается блоком определения фазового рассогласования.
Недостатком данного способа и устройства для его реализации является низкая точность фазирования вращающегося вала электродвигателя за счет того, что в известном устройстве при осуществлении известного способа на ранних этапах регулирования велика погрешность измерения значения рассогласования по угловой скорости Δω.
Техническим результатом изобретения является повышение точности фазирования вращающегося вала электродвигателя.
Указанный технический результат достигается тем, что в способе, по которому формируют последовательности импульсов опорной частоты fOП и импульсов fOC с импульсного датчика частоты, расположенного на валу электродвигателя, сравнивают fOП и fOC и определяют величину фазового рассогласования γ=Δϕ, формируют напряжение, пропорциональное току потребления двигателя, формируют последовательности импульсов FOC, поступающих с датчика положения ротора электродвигателя и импульсов фазирования FOП, сравнивают FOC и FOП и определяют величину углового рассогласования Δα, формируют на выходе импульсного частотно-фазового дискриминатора два дополнительных сигнала в моменты времени прихода двух импульсов частоты fOП между двумя соседними импульсами частоты fOС и при отсутствии импульсов частоты fOП между двумя соседними импульсами частоты fOC управляемого делителя частоты, подстроечную частоту fП, равную половине минимально возможной для управления электродвигателем fOП, с учетом разницы частот fOП и fП определяют величину частотного рассогласования Δf импульсов частот fOП и fOC путем подсчета импульсов частоты fП между двумя соседними импульсами дополнительных сигналов, формируемых на выходе второго импульсного частотно-фазового дискриминатора в моменты времени прихода двух импульсов частоты fП между двумя соседними импульсами частоты fOC и при отсутствии импульсов частоты fП между двумя соседними импульсами частоты fOC, при этом, если перестает выполняться условие fП<fOC, меняют значение fП на величину |ΔfП|≤0,02fП, повторяют изменение значения fП до тех пор, пока fП<fOП, в противном случае fП устанавливается равным fOП, при достижении величиной Δf заданного положительного значения прекращают подачу импульсов fП, переводят двигатель из двигательного в тормозной режим, причем в момент времени, определяемый на основе обработки полученных значений величин углового рассогласования Δα и частотного рассогласования Δω, возобновляют подачу импульсов fП, причем при достижении заданного отрицательного значения частотного рассогласования прекращают подачу импульсов fOC и переводят двигатель из тормозного в двигательный режим, в момент времени, определяемый на основе обработки полученных значений Δω и Δα, возобновляют подачу импульсов fOC.
Данный технический результат достигается также тем, что в устройстве для фазирования вращающегося вала электродвигателя, содержащем электродвигатель, на валу которого расположены импульсный датчик частоты вращения и датчик положения, выход которого подключен к четвертому входу блока определения фазового рассогласования, второй и третий входы которого подключены ко второму и третьему выходам первого импульсного частотно-фазового дискриминатора, блок определения частотного рассогласования, усилительно-корректирующее устройство, выход которого подключен к электродвигателю, согласно предложенному техническому решению с целью повышения точности выход импульсного датчика частоты подключен к первому входу второго импульсного частотно-фазового дискриминатора и второму входу первого импульсного частотно-фазового дискриминатора, первый выход которого подключен к первому входу первого логического элемента ИЛИ-НЕ, выход которого подключен к первому входу второго логического элемента ИЛИ-НЕ, который подключен к усилительно-корректирующему устройству, первый вход блока определения фазового рассогласования подключен к выходу делителя частоты, вход которого подключен к выходу первого управляемого делителя частоты, к которому также подключены первый вход первого импульсного частотно-фазового дискриминатора и пятый вход блока определения фазового рассогласования, порт А которого подключен к порту А блока регулирования, первый и второй выходы которого подключены ко вторым входам логических элементов ИЛИ-НЕ, а порт В подключен к порту D вычислительного устройства, порты В и С, которого подключены к портам А управляемых делителей частоты, а порт А подключен к порту А блока определения частотного рассогласования, входы управляемых делителей частоты подключены к выходу кварцевого генератора, выход второго управляемого делителя частоты подключен ко второму входу второго импульсного частотно-фазового дискриминатора и первому входу блока определения частотного рассогласования, ко второму и третьему входам которого подключены первый и второй выходы второго импульсного частотно-фазового дискриминатора.
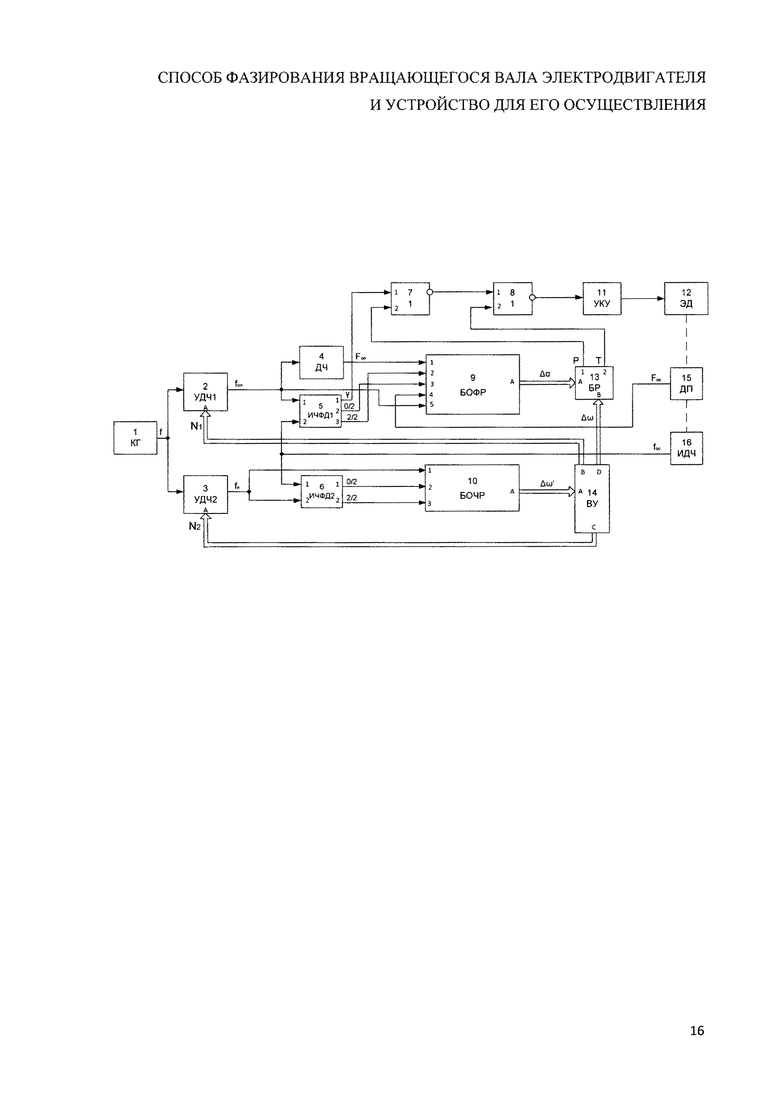
Сущность технического решения пояснена чертежами, где на фиг. приведена функциональная электрическая схема предлагаемого устройства.
Устройство для реализации способа содержит кварцевый генератор 1, управляемые делители частоты 2 и 3, делитель частоты 4, импульсные частотно-фазовые дискриминаторы 5 и 6, логические элементы ИЛИ-НЕ 7 и 8, блок определения фазового рассогласования 9, блок определения частотного рассогласования 10, усилительно-корректирующее устройство 11, электродвигатель 12, блок регулирования 13, вычислительное устройство 14, датчик положения 15, импульсный датчик частоты 16.
В устройстве к выходу кварцевого генератора 1 подключены входы управляемых делителей частоты 2 и 3. К выходу первого управляемого делителя частоты 2 подключены вход делителя частоты 4, первый вход блока определения фазового рассогласования 9 и первый вход первого импульсного частотно-фазового дискриминатора 5. При этом к первому входа блока определения фазового рассогласования 9 подключен выход делителя частоты 4, а ко второму и третьему входам подключены второй и третий выход первого импульсного частотно-фазового дискриминатора 5. Выход второго управляемого делителя частоты 3 подключен ко второму входу второго импульсного частотно-фазового дискриминатора 6 и первому входу блока определения частотного рассогласования 10. При этом ко второму и третьему входам блока определения частотного рассогласования 10 подключены выходы второго импульсного частотно-фазового дискриминатора 6. Первый выход импульсного частотно-фазового дискриминатора 5 подключен к первому входу логического элемента ИЛИ-НЕ 7, выход которого подключен к первому входу логического элемента ИЛИ-НЕ 8, последовательно соединенного с усилительно-корректирующим устройством 11 и электродвигателем 12, на валу которого закреплены датчик положения 15 и импульсный датчик частоты 16. Выходы блока регулирования 13 подключены ко вторым входам логических элементов ИЛИ-НЕ 7 и 8, а порты А и В к портам А блока определения фазового рассогласования 10 и порту D вычислительного устройства 14 соответственно. Порт А блока определения частотного рассогласования 10 подключен к порту А вычислительного устройства 14, порты В и С которого подключены к портам А управляемых делителей частоты 2 и 3 соответственно. Выход датчика положения 15 подключен к четвертому входу блока определения фазового рассогласования 9. Выход импульсного датчика частоты 16 подключен ко второму входу первого импульсного частотно-фазового дискриминатора 5 и первому входу второго импульсного частотно-фазового дискриминатора 6.
Способ фазирования вращающегося вала электродвигателя осуществляется следующим образом. На выходе кварцевого генератора 1 формируется частота f, которая поступает на входы управляемых делителей частоты 2 и 3. На выходе первого управляемого делителя частоты 2 формируют последовательности импульсов опорной частоты fOП, на выходе импульсного датчика частоты 16, расположенного на валу электродвигателя 12 формируют последовательности импульсов частоты fOC, сравнивают fOП и fOC с помощью первого импульсного частотно-фазового дискриминатора 5 и определяют величину фазового рассогласования γ=Δϕ, на выходе усилительно-корректирующего устройства 11 формируют напряжение, пропорциональное току потребления двигателя 12. Формируют последовательности импульсов FOC, поступающих с датчика положения 15 ротора электродвигателя 12 и импульсов фазирования FOП на выходе делителя частоты 4. С помощью блока определения фазового рассогласования 9 сравнивают FОС и FОП и определяют величину углового рассогласования Δα. На выходе второго управляемого делителя частоты 3 формируется сигнал подстроечной частоты fП. При этом на втором и третьем выходах второго импульсного частотно-фазового дискриминатора 6 формируются два сигнала в моменты времени прихода двух импульсов частоты fП между двумя соседними импульсами частоты fOC (2/2) и при отсутствии импульсов частоты fП между двумя соседними импульсами частоты fOC (0/2). С помощью блока определения частотного рассогласования 10 определяют значение Δω'. На основе этого значения вычислительное устройство 14 формирует значение Δω рассогласования по угловой скорости, а также сигналы задания N1 и N2 для управляемых делителей частоты 2 и 3. При достижении величиной Δω заданного значения прекращается подача импульсов fOП и fП, двигатель 12 переводится из двигательного в тормозной режим с путем подачи соответствующего логического сигнала со второго выхода блока регулирования 13, причем в момент времени, определяемый с помощью блока регулирования 13 на основе обработки полученных значений величин углового рассогласования Δα и частотного рассогласования Δω, возобновляют подачу импульсов fOП. При достижении заданного значения частотного рассогласования прекращают подачу импульсов fOC и переводят двигатель 12 из тормозного в двигательный режим, в момент времени, определяемый на основе обработки полученных значений Δα и Δω, возобновляют подачу импульсов fOC. Значение Δω определяется следующим образом. Значение fП при запуске устройства устанавливается кодом задания N2 из расчета половины необходимого для управления электродвигателем 12 значения fOП. Как только перестает соблюдаться условие fП<fOC, меняют значение fП на величину |ΔfП|≤0,02fП. Как только перестает соблюдаться условие fП<fOП, значение fП устанавливается равным fOП и далее не меняется до изменения значения заданной угловой скорости. Блок определения частотного рассогласования 10, на основе подсчета количества импульсов частоты fП между двумя последовательными ситуациями прихода двух импульсов частоты fП между двумя соседними импульсами частоты fOC (2/2) и при отсутствии импульсов частоты fП между двумя соседними импульсами частоты fOC (0/2), производит расчет Δω' по формулам, представленным в (Пат. РФ №145335 от 16.04.2014 МПК Н02Р 7/06, Н02Р 7/285, G05B 11/30, 7-8 С). По результатам этого расчета вычислительное устройство 14 производит расчет фактического значения Δω с учетом различия значения fП и fOП.
По сравнению с известными техническими решениями предложенные способ фазирования вращающегося вала электродвигателя и устройство для его осуществления позволяют измерять рассогласование по угловой скорости на ранних этапах регулирования с минимальной погрешностью, что позволяет повысить точность фазирования вращающегося вала электродвигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475932C1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2649307C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2462809C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| ЧАСТОТНО-ФАЗОВЫЙ ДИСКРИМИНАТОР | 2010 |
|
RU2428785C1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1989 |
|
SU1612368A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2585241C1 |
Изобретение относится к электротехнике, а именно к электроприводу. При фазировании вала электродвигателя формируют импульсы FОС на выходе ДПР (15) и импульсы фазирования FОП на выходе ДЧ (4). При сравнении FОС и FОП блок (9) фазового рассогласования определяет величину углового рассогласования Δα. При сравнении fOП и fOC определяют величину фазового рассогласования γ=Δϕ. На выходах управляемых делителей (2,3) частоты формируют частоту fОП для управления электродвигателем (12) и частоту fП = fОП/2. При условии fП<fОС значение |ΔfП|≤0,02fП. При условии fП<fOП значение fП = fОП. Вычислительное устройство (14) формирует значение Δω рассогласования по угловой скорости, а также сигналы задания N1 и N2 для управляемых делителей частоты (2,3). На основе обработки значений Δα и Δω блок (13) регулирования переводит электродвигатель (12) в тормозной режим или в двигательный. Технический результат состоит в уменьшении погрешности измерения фазового рассогласования вращающегося вала электродвигателя. 2 н.п. ф-лы, 1 ил.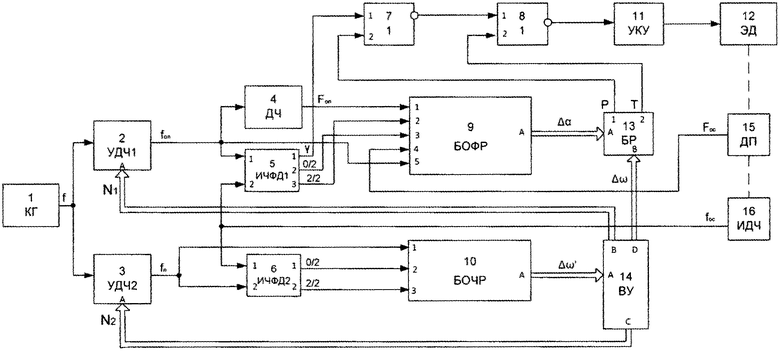
1. Способ фазирования вращающегося вала электродвигателя, по которому формируют последовательности импульсов опорной частоты fОП и импульсов fОС с импульсного датчика частоты, расположенного на валу электродвигателя, сравнивают fОП и fОС и определяют величину фазового рассогласования γ=Δϕ, формируют напряжение, пропорциональное току потребления двигателя, формируют последовательности импульсов FОС, поступающих с датчика положения ротора электродвигателя и импульсов фазирования FОП, сравнивают FОС и FОП и определяют величину углового рассогласования Δα, формируют на выходе импульсного частотно-фазового дискриминатора два дополнительных сигнала в моменты времени прихода двух импульсов частоты fОП между двумя соседними импульсами частоты fOC и при отсутствии импульсов частоты fОП между двумя соседними импульсами частоты fОС, отличающийся тем, что с целью повышения точности формируют на выходе управляемого делителя частоты подстроечную частоту fП, равную половине минимально возможной для управления электродвигателем fОП, с учетом разницы частот fОП и fП определяют величину частотного рассогласования Δf импульсов частот fОП и fОС путем подсчета импульсов частоты fП между двумя соседними импульсами дополнительных сигналов, формируемых на выходе второго импульсного частотно-фазового дискриминатора в моменты времени прихода двух импульсов частоты fП между двумя соседними импульсами частоты fОС и при отсутствии импульсов частоты fП между двумя соседними импульсами частоты fОС, при этом, если перестает выполняться условие fП<fОС, меняют значение fП на величину |ΔfП|≤0,02fП, повторяют изменение значения fП до тех пор, пока fП<fОП, в противном случае fП устанавливается равным fОП, при достижении величиной Δf заданного положительного значения прекращают подачу импульсов fП, переводят двигатель из двигательного в тормозной режим, причем в момент времени, определяемый на основе обработки полученных значений величин углового рассогласования Δα и частотного рассогласования Δω, возобновляют подачу импульсов fП, причем при достижении заданного отрицательного значения частотного рассогласования прекращают подачу импульсов fОС и переводят двигатель из тормозного в двигательный режим, в момент времени, определяемый на основе обработки полученных значений Δω и Δα, возобновляют подачу импульсов fОС.
2. Устройство для фазирования вращающегося вала электродвигателя, содержащее электродвигатель, на валу которого расположены импульсный датчик частоты вращения и датчик положения, выход которого подключен к четвертому входу блока определения фазового рассогласования, второй и третий входы которого подключены ко второму и третьему выходам первого импульсного частотно-фазового дискриминатора, блок определения частотного рассогласования, усилительно-корректирующее устройство, выход которого подключен к электродвигателю, отличающееся тем, что с целью повышения точности выход импульсного датчика частоты подключен к первому входу второго импульсного частотно-фазового дискриминатора и второму входу первого импульсного частотно-фазового дискриминатора, первый выход которого подключен к первому входу первого логического элемента ИЛИ-НЕ, выход которого подключен к первому входу второго логического элемента ИЛИ-НЕ, который подключен к усилительно-корректирующему устройству, первый вход блока определения фазового рассогласования подключен к выходу делителя частоты, вход которого подключен к выходу первого управляемого делителя частоты, к которому также подключены первый вход первого импульсного частотно-фазового дискриминатора и пятый вход блока определения фазового рассогласования, порт А которого подключен к порту А блока регулирования, первый и второй выходы которого подключены ко вторым входам логических элементов ИЛИ-НЕ, а порт В подключен к порту D вычислительного устройства, порты В и С которого подключены к портам А управляемых делителей частоты, а порт А подключен к порту А блока определения частотного рассогласования, входы управляемых делителей частоты подключены к выходу кварцевого генератора, выход второго управляемого делителя частоты подключен ко второму входу второго импульсного частотно-фазового дискриминатора и первому входу блока определения частотного рассогласования, ко второму и третьему входам которого подключены первый и второй выходы второго импульсного частотно-фазового дискриминатора.
| Цифровой следящий электропривод | 1974 |
|
SU723505A1 |
| Способ фазирования вращающегося вала электродвигателя | 1984 |
|
SU1272444A1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475932C1 |
| JPS 54154021 A, 04.12.1979 | |||
| US 4415844 A, 15.11.1983 | |||
| US 2002067148 A1, 06.06.2002 | |||
| US 2008277079 A1, 04.12.2008. | |||

