Изобретение относится к области измерительной техники и может быть использовано для определения деформации различных объектов, в частности для измерения деформации поверхности твердых тел, находящихся под воздействием изменяющихся во времени одноосных или двухосных (плоских) напряжений.
Известно устройство для измерения деформаций (тензодатчик), содержащее индуктивный преобразователь в виде катушки и связанного с ней сердечника, установленный в механизме передачи перемещений, взаимодействующем с испытуемой поверхностью объекта посредством подвижного и неподвижного наконечников (авт.свид. СССР № 295066, МПК G01В 7/16, 1971).
Недостатком известного устройства является сложность конструкции, невозможность изменения базы измерения (исходного расстояния между наконечниками) и неудобство эксплуатации при длительных испытаниях на объектах с переменными деформациями.
Известен также тензодатчик, содержащий индуктивный преобразователь в виде корпуса с расположенной в нем катушкой и взаимодействующего с ней сердечника с подставкой, закрепляемый на поверхности деформируемого объекта (авт.свид. № 787886, МПК 3 G01В 7/16, 1980). При деформации контролируемой поверхности в направлении оси катушки сердечник перемещается относительно последней, при этом сигнал с блока преобразования эдс катушки пропорционален величине деформации.
Недостатком этого устройства является ненадежность крепления элементов индуктивного преобразователя и узкий диапазон измеряемых деформаций при использовании тензодатчика для контроля напряженного состояния твердых тел, что ограничивает эксплуатационные возможности устройства.
Наиболее близким к предлагаемому изобретению является тензодатчик, содержащий преобразователь линейных перемещений в виде катушки индуктивности и взаимодействующего с ней сердечника с подставкой, закрепляемых на поверхности деформируемого объекта через эластичную подложку (свидетельство РФ на полезную модель №25346 от 13.02.02 г.- прототип). При деформации контролируемой поверхности центры катушки и подставки сердечника, расположенные на расстоянии, равном базе тензодатчика, смещаются относительно друг друга, и по величине смещения, отнесенного к базе, определяют относительную деформацию исследуемого участка поверхности.
Недостатком устройства-прототипа является низкая точность измерения, обусловленная неоднородностью эластичной подложки под катушкой и подставкой сердечника, приводящая к неконтролируемому смещению центров указанных элементов датчика относительно базовых точек. Устройство-прототип обладает ограниченными эксплуатационными возможностями из-за непостоянства свойств эластичных подложек (включая потерю эластичности и сужение диапазона измерения деформаций) в широком диапазоне температур. Кроме того, известное устройство имеет ограничение по минимальной базе, поскольку она обусловлена габаритами элементов датчика и не может быть менее полусуммы длин элементов датчика в направлении деформации.
Предлагаемое изобретение направлено на повышение точности определения относительной деформации объектов и расширение эксплуатационных возможностей тензодатчика.
Указанный технический результат достигается тем, что в тензодатчике, содержащем преобразователь линейных перемещений из двух взаимно перемещающихся элементов, согласно изобретению каждый из элементов преобразователя установлен на отдельную платформу, снабженную линейными или точечными опорами со стороны деформируемой поверхности и прижимом, действующим перпендикулярно этой поверхности. Часть опор расположена с одной стороны от линии, проходящей через среднюю точку приложения усилия прижима перпендикулярно направлению деформации, а одна или более других опор расположена(ы) с другой стороны от указанной линии, причем опоры с одной стороны расположены по линии, перпендикулярной направлению деформации, и выполнены с большим коэффициентом сцепления с деформируемой поверхностью, чем опоры с другой стороны.
Каждая из платформ может быть снабжена тремя опорами, две из которых расположены с одной стороны от линии, проходящей через среднюю точку приложения усилия прижима перпендикулярно направлению деформации, а третья - с другой стороны симметрично по отношению к другим опорам, причем расстояние между средней точкой приложения усилия прижима и линией расположения первых двух опор меньше, чем расстояние от средней точки приложения усилия прижима до третьей опоры. Первые две опоры могут быть выполнены из твердого материала и заостренными или со сферической контактной поверхностью, а в качестве прижима использован один или несколько постоянных магнитов.
В качестве одного из элементов преобразователя линейных перемещений могут быть использованы одна или несколько катушек индуктивности с осью, параллельной направлению деформации, а в качестве другого элемента - металлический, например ферромагнитный, сердечник с хвостовиком и подставкой, установленной на платформу. Хвостовик сердечника соединен с подставкой с возможностью перемещения в направлении деформации и фиксации в заданном положении. Каждая из платформ с катушкой индуктивности и сердечником может быть снабжена двумя постоянными магнитами с намагниченностью, перпендикулярной деформируемой поверхности, расположенными с двух сторон от катушки и подставки сердечника в плоскости, перпендикулярной направлению деформации. Хвостовик сердечника может быть выполнен неметаллическим, неферромагнитным и гибким в направлении, перпендикулярном его оси.
Применение в тензодатчике платформ, снабженных опорами со стороны деформируемой поверхности и прижимом, действующим перпендикулярно деформируемой поверхности, позволяет увеличить точность определения относительной деформации контролируемой поверхности за счет снижения поверхности контакта (опорной поверхности) элементов датчика с деформируемой поверхностью и исключения смещения элементов относительно базовых точек. Это обусловлено тем, что поскольку часть опор каждой платформы расположена с одной стороны от линии, проходящей через среднюю точку приложения усилия прижима перпендикулярно направлению деформации (базовой линии), и выполнена с большим коэффициентом сцепления с деформируемой поверхностью (базовые опоры), чем опоры с другой стороны указанной линии (скользящие опоры), то платформы в процессе деформации контролируемой поверхности не смещаются относительно базовых линий, а перемещаются вместе с ними.
Использование трех опор, две из которых расположены с одной стороны от линии, проходящей через среднюю точку приложения усилия прижима перпендикулярно направлению деформации, а третья - с другой стороны симметрично по отношению к другим опорам, позволяет упростить устройство и снизить его габариты, а также проводить измерения на изделиях с криволинейной поверхностью. Выбор расстояния между средней точкой приложения усилия прижима и линией расположения первых двух (базовых) опор меньшего, чем расстояние от средней точки приложения усилия прижима до третьей (скользящей) опоры, способствует усилению сцепления базовых опор с деформируемой поверхностью и ослаблению сцепления с ней скользящей опоры. Этому же способствует выполнение базовых опор из твердого материала и заостренными или со сферической контактной поверхностью. Последнее, благодаря минимизации площади контактных поверхностей базовых опор, обеспечивает также более стабильную, чем для плоских опор, привязку платформ к базовым линиям деформируемой поверхности.
Применение в качестве прижима одного или нескольких постоянных магнитов упрощает устройство и обеспечивает постоянство прижима платформ независимо от перемещения их по деформируемой поверхности, а также позволяет измерять деформации на поверхностях с любым наклоном по отношению к горизонтали.
Использование в качестве одного из элементов преобразователя линейных перемещений одной или нескольких катушек индуктивности с осью, параллельной направлению деформации, а в качестве другого элемента - металлического, например ферромагнитного, сердечника с хвостовиком и подставкой, установленной на платформу, позволяет увеличить диапазон измеряемых деформаций при неизменных габаритах катушки и сердечника. Это достигается за счет того, что установка хвостовика сердечника в подставке с возможностью перемещения в направлении деформации и фиксации в заданном положении дает возможность многократно переустанавливать сердечник в катушке по мере увеличения деформации одного знака, расширяя таким образом, диапазон измерения. Установка на каждой из платформ с катушкой индуктивности и сердечником двух постоянных магнитов с намагниченностью, перпендикулярной деформируемой поверхности, и расположение их с двух сторон от катушки и подставки сердечника в плоскости, перпендикулярной направлению деформации, позволяет выравнивать усилие прижима на базовые опоры и предотвращать поворот платформ относительно одной из базовых точек в процессе деформации контролируемой поверхности.
Выполнение хвостовика сердечника неметаллическим и неферромагнитным позволяет исключить влияние материала хвостовика на показания индуктивного преобразователя перемещений, а изготовление хвостовика гибким в направлении, перпендикулярном его оси, избежать заклинивания сердечника в катушке при возникновении их несоосности.
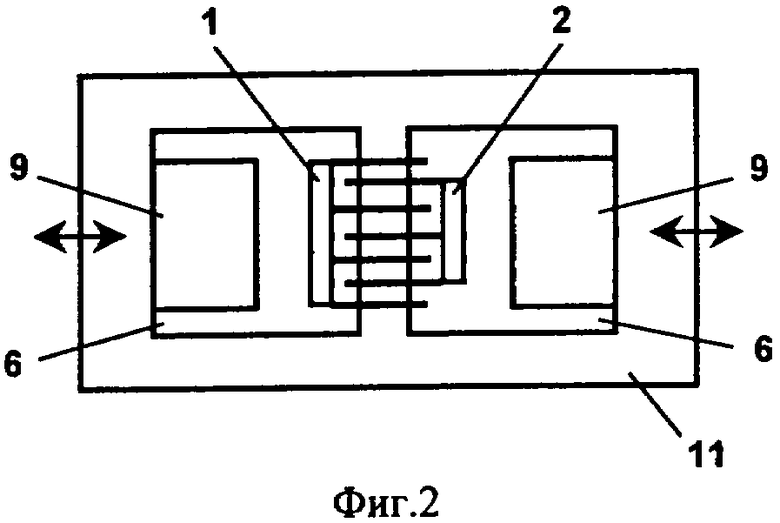
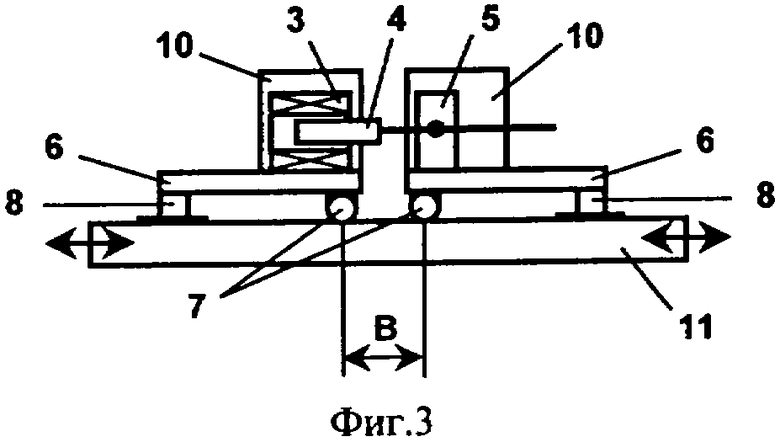
Изобретение поясняется чертежами, где на фиг.1 показан тензодатчик с емкостным преобразователем линейных перемещений и прижимом платформ в виде грузов; на фиг.2 - то же, вид сверху; на фиг.3 - тензодатчик с индуктивным преобразователем линейных перемещений и прижимом в виде двух постоянных магнитов; на фиг.4 - то же, вид сверху.
Тензодатчик содержит преобразователь линейных перемещений, состоящий из двух взаимно перемещающихся элементов - пластин 1 и 2 конденсатора (фиг.1, 2), катушки 3 индуктивности (или две и более соосных друг другу катушек) и сердечника 4 (фиг.3, 4). Хвостовик сердечника 4 установлен на подставку 5 с возможностью перемещения в направлении деформации и фиксации в заданном положении. Пластины 1 и 2 конденсатора, катушка 3 и подставка 5 сердечника 4 расположены соответственно на платформах 6. Последние снабжены опорами 7 и 8 (фиг.1, 3) и прижимом в виде груза 9 (фиг.1, 2) или двух постоянных магнитов 10 (фиг.2, 4) с усилием прижима, направленным перпендикулярно деформируемой поверхности изделия 11. Предпочтительным направлением намагниченности постоянных магнитов 10 является направление, перпендикулярное деформируемой поверхности, при этом намагниченность одно из магнитов направлена в сторону деформируемой поверхности, а намагниченность другого магнита - в противоположную сторону. Это позволяет снизить (а при симметричном расположении магнитов относительно катушки полностью исключить) влияние магнитного поля постоянных магнитов на катушку индуктивности с ферромагнитным сердечником (отсутствует составляющая магнитного поля магнитов вдоль оси сердечника). При работе тензодатчика с постоянными магнитами на изделиях из неферромагнитных материалов на деформируемую поверхность в пределах зазора между ней и платформами могут быть приклеены специальные ферромагнитные накладки (на чертежах не показаны), взаимодействующие с постоянными магнитами тензодатчика.
Опоры 7 расположены с одной стороны от линии, проходящей через среднюю точку приложения усилия прижима перпендикулярно направлению деформации (фиг.1, 3), а опоры 8 расположены с другой стороны от указанной линии. Опоры 7 расположены по линии, перпендикулярной направлению деформации, и являются базовыми (база В - расстояние между линиями расположения опор 7 двух платформ). Они выполнены с большим коэффициентом сцепления (трения) с деформируемой поверхностью, чем опоры 8 (на фиг.1 опоры 7 выполнены заостренными, на фиг.3 - со сферической контактной поверхностью, а опоры 8 - с плоской поверхностью). Заостренные или сферические базовые опоры могут быть выполнены из твердого материала для лучшего сцепления с деформируемой поверхностью, а опоры 8 могут быть выполнены с элементами качения. Хвостовик сердечника 4 (фиг.3) может быть выполнен неметаллическим, неферромагнитным и гибким в направлении, перпендикулярном оси сердечника.
Тензодатчик работает следующим образом.
На контролируемую поверхность деформируемого изделия 11 (фиг.1, 3) устанавливаются платформы 6 с элементами преобразователя линейных перемещений - элементами 1 и 2 конденсатора (фиг.1, 2) или катушкой (катушками) 3, сердечником 4 и подставкой 5 индуктивного преобразователя (фиг.3, 4). Платформы устанавливаются на деформируемую поверхность таким образом, чтобы линии базовых опор 7 были расположены друг от друга на заданном расстоянии В (фиг.1, 3), и прижимаются к поверхности с помощью прижимов - грузов 9 (фиг.1, 2), постоянных магнитов 10 (фиг.3, 4) или другими видами прижимных устройств с усилием прижима, перпендикулярным деформируемой поверхности. Опоры 8, имеющие меньший коэффициент сцепления с контролируемой поверхностью (скользящие опоры), могут располагаться в зависимости от величины необходимой базы В между базовыми опорами 7 (фиг.1) или снаружи от них (фиг.3). Заостренные базовые опоры 7 могут фиксироваться также с помощью углублений (канавок) вдоль базовых линий контролируемой поверхности, а противоположные им опоры 8 иметь одну или несколько прокладок с минимальным коэффициентом трения (фиг.3).
При деформации изделия 11 базовые опоры 7 платформ 6 (фиг.1, 3) перемещаются вместе с базовыми линиями деформируемой поверхности, поскольку противоположные им опоры 8, имеющие меньший коэффициент сцепления с поверхностью изделия, перемещаются (скользят, перекатываются) по ней и не влияют на положение опор 7 относительно базовых линий. В результате измеренные абсолютные перемещения Δl элементов 1 и 2 (фиг.1, 2), 3 и 4 (фиг.3, 4) относительно друг друга, отнесенные к базе В, позволяют непосредственно определить относительную деформацию контролируемой поверхности ε=Δl/В. При этом в случае использования конденсатора Δl определяется по изменению емкости его пластин, а в индуктивном преобразователе - по изменению параметров катушки (индуктивности, комплексного сопротивления и т.д.).
Предлагаемый тензодатчик позволяет существенно упростить процедуру измерения относительных деформаций различных изделий, поскольку по сравнению с приклеиваемыми тензодатчиками (например, тензорезисторами) не требуется тщательной обработки контролируемой поверхности и сложной технологии крепления к ней датчика. Применение магнитного прижима платформ датчика при работе с ферромагнитными изделиями дает возможность измерений в труднодоступных местах объектов. Важным преимуществом предлагаемого тензодатчика является возможность его многократного снятия и повторной установки на объект, например, для промежуточных измерений в контролируемой зоне других (например, электромагнитных или акустических) параметров изделия. Кроме того, такой датчик, при необходимости, может быть прокалиброван непосредственно на контролируемом изделии, а также использован для калибровки в этих условиях других тензодатчиков (например, путем установки тензодатчика на контролируемый участок вместе с калибруемым тензорезистором).
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОМЕТР | 2011 |
|
RU2483277C1 |
| СПОСОБ ИЗМЕРЕНИЯ НАГРУЗКИ, ДЕЙСТВУЮЩЕЙ НА СКВАЖИННЫЙ БУРОВОЙ ИНСТРУМЕНТ | 2004 |
|
RU2377404C2 |
| Датчик деформации | 2016 |
|
RU2658089C1 |
| ВИБРАЦИОННЫЙ РЕОМЕТР | 2015 |
|
RU2608574C1 |
| СПОСОБ КОНТРОЛЯ ПОВЕРХНОСТНЫХ ДЕФОРМАЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2121655C1 |
| Вихретоковый преобразователь | 1986 |
|
SU1460693A1 |
| Устройство для испытания образца на растяжение | 1986 |
|
SU1427219A1 |
| ЭЛЕКТРОМАГНИТНЫЙ АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ И СИСТЕМА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ С ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2009 |
|
RU2489713C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ НИТЕВИДНОГО МАТЕРИАЛА | 2015 |
|
RU2602616C2 |
| Вибрационный вискозиметр и способ его регулировки | 1989 |
|
SU1742676A1 |

Изобретение относится к области измерительной техники и может быть использовано для определения деформации различных объектов. Технический результат: повышение точности определения относительной деформации и расширение эксплуатационных возможностей. Сущность: тензодатчик содержит преобразователь линейных перемещений, состоящий из двух взаимно перемещающихся элементов. Каждый из элементов преобразователя установлен на отдельную платформу, снабженную линейными или точечными опорами со стороны деформируемой поверхности и прижимом, действующим перпендикулярно этой поверхности. Часть опор расположена с одной стороны от линии, проходящей через среднюю точку приложения усилия прижима перпендикулярно направлению деформации. Одна или более других опор расположены с другой стороны от указанной линии. Опоры с одной стороны расположены по линии, перпендикулярной направлению деформации, и выполнены с большим коэффициентом сцепления с деформируемой поверхностью, чем опоры с другой стороны. В качестве прижима использован один или несколько постоянных магнитов. В качестве одного из элементов преобразователя могут быть использованы одна или несколько катушек индуктивности, а в качестве другого - ферромагнитный сердечник с хвостовиком и подставкой, установленной на платформу. 6 з.п. ф-лы, 4 ил.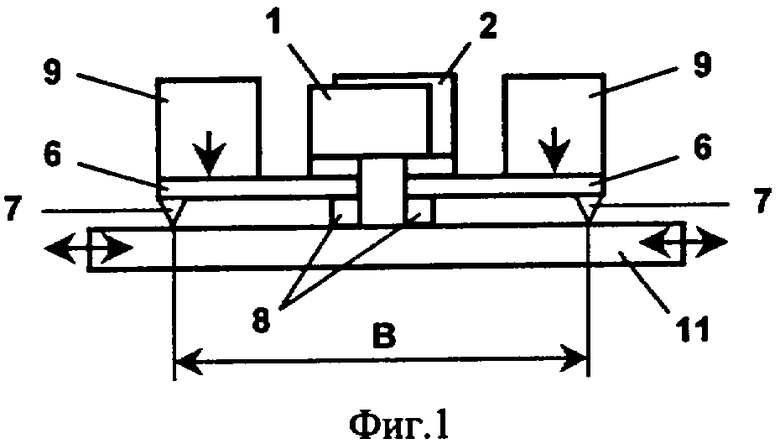
| Коническая сужающаяся книзу гильза для высаживания рассады | 1930 |
|
SU25346A1 |
| Индуктивный преобразователь деформаций | 1978 |
|
SU787886A1 |
| Устройство для измерения продольных и угловых деформаций | 1972 |
|
SU482616A1 |
| Тензометр | 1990 |
|
SU1719883A1 |
| 0 |
|
SU295014A1 |

