Настоящее изобретение относится к предотвращению столкновений между летательными аппаратами и, в частности, касается предупреждения столкновений между воздушными судами и беспилотного летательного аппарата.
Беспилотный воздушный аппарат (БПЛА) является летательным аппаратом без пилота на борту. Этот летательный аппарат может быть оснащен автоматическими системами и осуществлять свой полет автономно; он может также содержать датчики и управляться дистанционно пилотом с земли.
Из уровня техники известен способ навигации беспилотного аппарата (патент RU 2661242, МПК G08G 5/04, опубл. 13.07.2018) в присутствии, по меньшей мере, одного постороннего летательного аппарата в зоне пространства, окружающего беспилотный аппарат, согласно которому на основании мощности принимаемого сигнала вычисляют оценочное расстояние между беспилотным аппаратом и посторонним летательным аппаратом и подтверждают его, если оценочное значение данных позиционирования, вычисленное беспилотным аппаратом с использованием оценочного расстояния, по существу, соответствует измеренному значению данных позиционирования.
Недостатком данного способа является отсутствие максимально точной и подробной информации о воздушных средствах. АЗН-В позволяет получать точные GPS координаты судна, высоту, горизонтальную и вертикальную скорости, а также идентификатор и номер судна.
Из уровня техники известен способ предупреждения столкновения БПЛА с посторонним воздушным судном (патент RU 2581455, МПК G08G 5/00, опубл. 20.04.2016, прототип). Для предупреждения столкновения определяют положение постороннего воздушного судна относительно беспилотного летательного аппарата, измеряют угловую скорость постороннего воздушного судна в горизонтальной плоскости, определяют, оснащено ли постороннее воздушное судно системой TCAS, следуют по предварительно определенной траектории уклонения согласно полученному извещению от TCAS постороннего воздушного судна. В случае отсутствия системы TCAS у постороннего воздушного судна траекторию уклонения определяют самостоятельно. При этом БПЛА для реализации способа предупреждения столкновения содержит приемоответчик режима S, запросчик приемоответчика, средства определения положения и угловой скорости постороннего воздушного судна, систему управления полетом.
Недостатком данного способа является исключение вертикальных маневров и отсутствие информирования пилота о возможном столкновении. Системой TCAS оборудованы борта тяжелее 5,7 тонн или с числом пассажирских мест более 19, что исключает из этой системы большое количество малых гражданских воздушных судов. Использование системы TCAS является сложным и не подходит для беспилотных аппаратов, которые, как правило, имеют относительно низкую стоимость.
Задачей изобретения является облегчение навигации беспилотного аппарата с установленной системой автоматического зависимого наблюдения-вещания (АЗН-В) и возможности уклоняться от столкновения с посторонним воздушным судном за счет того, что осуществляется расчет траектории уклонения более чем от одного воздушного судна, как в горизонтальной, так и в вертикальной плоскости, переча внешнему пилоту информацию о возможном столкновении и в случае бездействия вмешательство в управление полётом БПЛА.
Технический результат достигается тем, что способ предупреждения столкновения беспилотного аппарата с воздушным судном содержит следующие этапы:
- получают информацию о местоположении, курсе и скорости постороннего воздушного судна, оборудованного системой АЗН-В,
- по актуальным данным осуществляют расчет и построение зоны прогноза, предупреждения и уклонения, при этом
- радиус зоны прогноза вычисляют по формуле:

где Rзпр - радиус зоны прогноза в метрах;
Uла - скорость постороннего воздушного судна (ВС) относительно БПЛА в метрах.
- радиус зоны предупреждения вычисляют по формуле:

где Rзп - радиус зоны предупреждения в метрах,
- радиус зоны уклонения вычисляют по формуле:

где Rу - радиус зоны уклонения в метрах,
минимальный радиус зоны прогноза 4000 метров и минимальный размер по высоте зоны прогноза 1500 метров; минимальный радиус зоны предупреждения 2000 метров и минимальный размер по высоте зоны предупреждения 800 метров; а минимальный радиус зоны уклонения 1000 метров и минимальным размером по высоте 500 метров,
- после вычисления Rзпр, Rзп и Rу принимается решение соответственно о построении прогноза траектории постороннего воздушного судна по актуальным данным, подаче сигнала пилоту БПЛА о воздушном столкновении, и в случае бездействия автоматическое построение маневра БПЛА и уход с траектории полета постороннего воздушного средства,
при этом БПЛА, оснащенный такой системой АЗН-В, принимает сигналы от ВС, получая данные о местоположении, высоте, направлении и скорости, а также передает в эфир сигналы БПЛА, отправляя данные о местоположении, высоте, направлении и скорости.
Для понимания поведения самолетов в случае уклонения было проанализировано руководство ACAS. Известно, что все манёвры по уклонению от столкновений основаны на изменении высот одного из самолетов. Так как, чаще всего, БПЛА является более манёвренным судном, то будут иметь место горизонтальные маневры, позволяющие быстро уйти с курса другого постороннего воздушного судна.
Получив информацию о курсе и скорости постороннего ВС от модуля АЗН-В в воздушном пространстве, рассчитывают зоны прогноза предупреждения и уклонения по формулам (1), (2) и (3). Зоны строят вокруг посторонних ВС и необходимы для понимания уровня угрозы. Зона прогноза необходима для отсева далеко и/или медленно летящих посторонних ВС для экономии вычислительных мощностей. Зона предупреждения необходима для информирования пилота о находящихся рядом посторонних воздушных судов. Зона уклонения необходима для автоматического построения траектории ухода от курса и выполнение уклонения от постороннего воздушного судна.
В случае, когда вектор скорости постороннего ВС направлен от БПЛА, зоны можно не рассчитывать, так как столкновение невозможно.
На БПЛА, оснащенном также системой АЗН-В, система принимает сигналы от ВС, получая данные о местоположении, высоте, направлении и скорости, а также передает сигналы БПЛА, отправляя данные о местоположении, высоте, направлении и скорости.
Вычислительный модуль производит расчёт зон и, согласно алгоритму, принимает решение о предупреждении оператора или уклонении БПЛА, передавая сигналы управления.
Исходя из вышесказанного данный способ, в отличие от способов использования системы TCAS, позволяет «видеть» и производить маневры уклонения от любого ВС, оборудованного АЗН-В передатчиком.
Алгоритм с построением зон для горизонтальных маневров позволяет адаптироваться под ВС с разной скоростью полета, а также рассчитывать манёвры уклонения в случаях возможных столкновений с несколькими ВС.
Описание представлено со ссылками на прилагаемые чертежи, на которых:
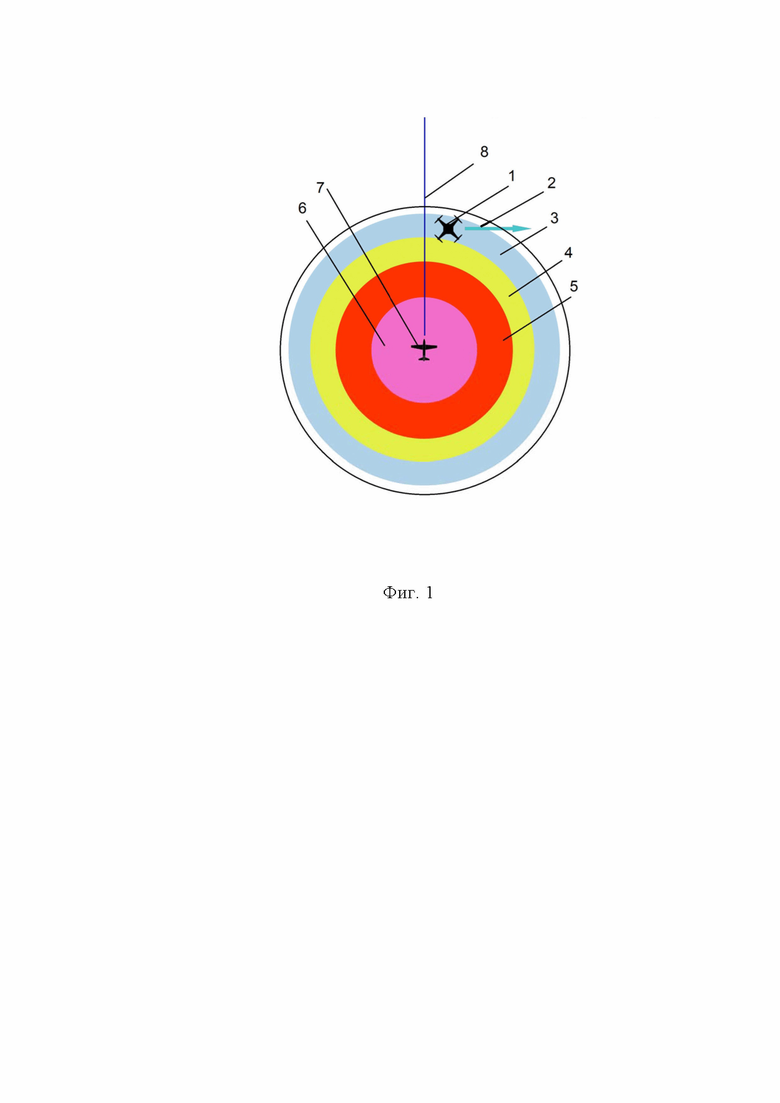
фиг. 1 – схематичный вид в перспективе, иллюстрирующий ситуацию попадания беспилотного летательного аппарата в зоны воздушного судна в соответствии с изобретением,
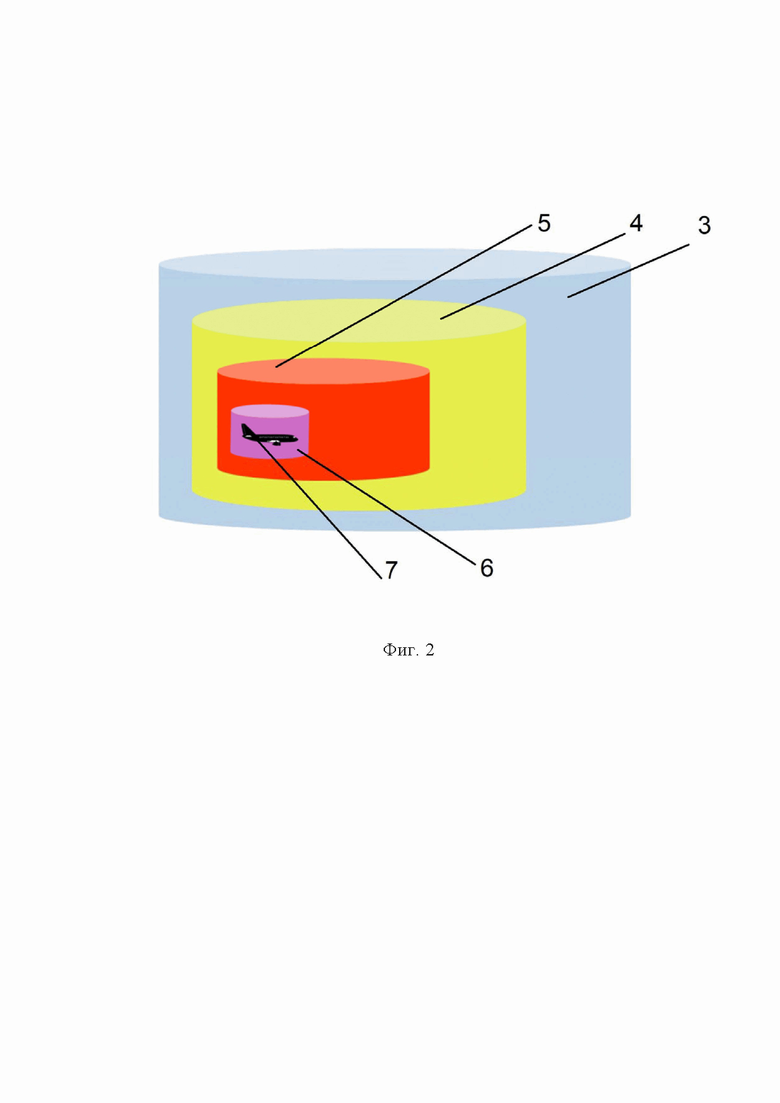
фиг. 2 – схема построения зон воздушного судна,
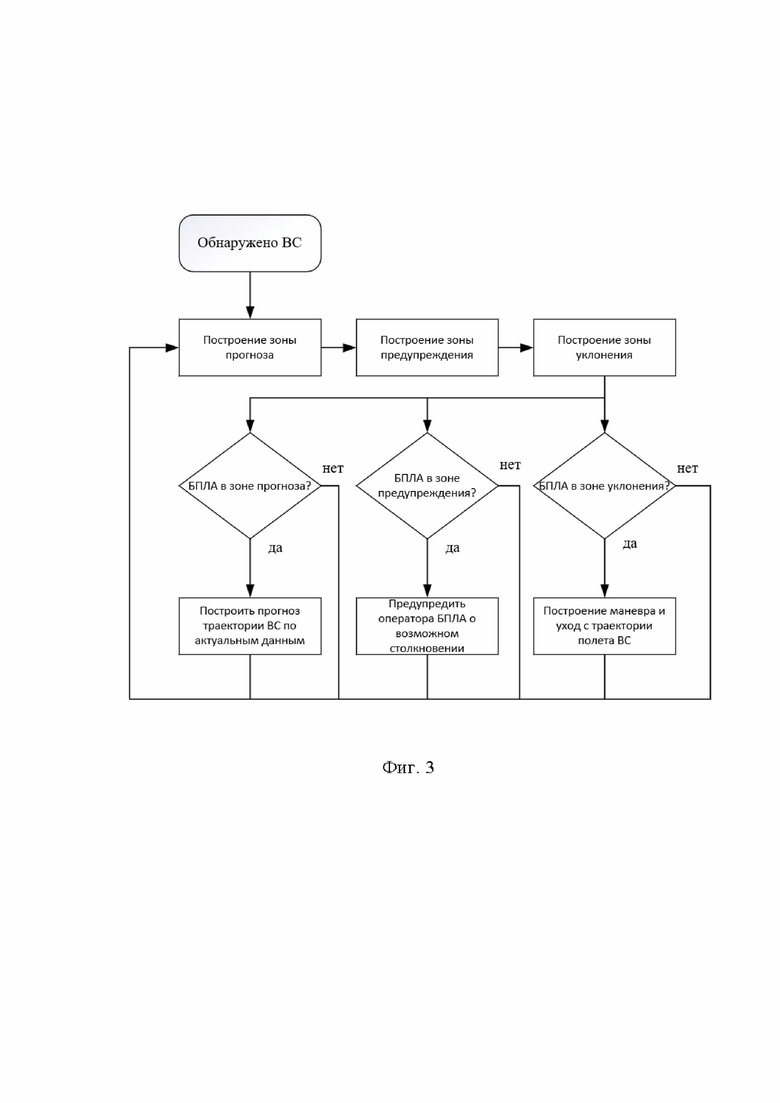
фиг. 3 – блок-схема способа,
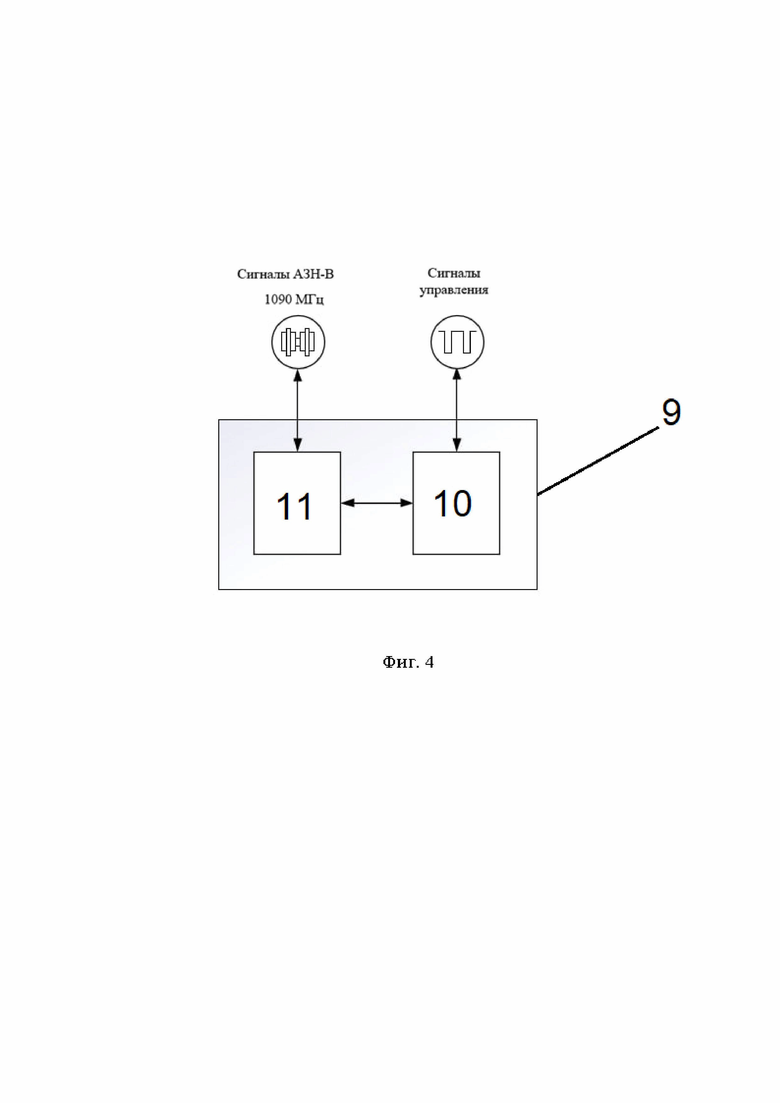
фиг. 4 – структурная схема автоматической системы анализа и обработки данных.
На фиг.1 – фиг. 4 позициями обозначены следующие элементы: 1 – БПЛА, 2 – направление траектории ухода от столкновения, 3 – зона прогноза, 4 – зона предупреждения, 5 – зона уклонения, 6 – зона столкновения; 7 – постороннее воздушное судно, 8 – прогноз траектории постороннего воздушного судна, 9 – автоматическая система анализа и обработки данных БПЛА, включающая вычислительный модуль 10 и АЗН-В 11.
Беспилотный летательный аппарат 1 непрерывно получает данные от модуля АЗН-В 11, показанного на фиг. 4, и в случае получения информации от любого другого модуля АЗН-В, установленного на постороннем воздушном судне 7, автоматическая система 9 анализа и обработки данных в вычислительном модуле 10 по формулам (1), (2) и (3) производит построение зон вокруг постороннего воздушного судна 7, дополнительно изображенных на фиг. 2, основываясь на скорости воздушного судна 7 относительно БПЛА 1. При этом вычислительный модуль 10 может быть выполнен, например, на базе АRМ чипа.
В соответствии с алгоритмом, указанным на фиг. 3, если БПЛА 1 находится зоне прогноза 3, то системой 9 строится прогноз 8 траектории постороннего воздушного судна 7, исходя из направления и скорости. В случае, когда БПЛА 1 попадает в зону предупреждения 4, система 9 передает оператору БПЛА 1 сигнал-тревогу о нахождении рядом постороннего воздушного судна 7, информацию о его положении относительно БПЛА 1, скорости сближения, идентификаторе и номере судна. Когда БПЛА 1 попадает в зону уклонения 5, система 9 строит кротчайший маршрут ухода 2 от траектории постороннего воздушного судна 7 с учетом направления, горизонтальной и вертикальной скорости воздушного судна 7, и немедленно выполняет его до момента выхода из зоны уклонения 5. В случае, если к БПЛА 1 приближается зона столкновения 6, необходимо к горизонтальной составляющей манёвра добавить вертикальную составляющую и задействовать 100% мощности моторов, для скорейшего ухода от столкновения.
Представленный способ позволяет «видеть» и производить маневры уклонения от любого постороннего воздушного судна, оборудованного АЗН-В передатчиком.
Алгоритм с построением зон для горизонтальных маневров позволяет адаптироваться под воздушное судно с разной скоростью полета, а также рассчитывать манёвры уклонения в случаях возможных столкновений с несколькими воздушными судами.
Изобретение относится к способу предупреждения столкновения беспилотного летательного аппарата (БПЛА) с воздушным судном. Для предупреждения столкновения используют на БПЛА систему автоматического зависимого наблюдения АЗН-В, с помощью которой получают информацию о местоположении, курсе и скорости постороннего воздушного судна, также оборудованного системой АЗН-В, передают в эфир сигналы БПЛА, отправляя данные о местоположении, высоте, направлении и скорости, осуществляют расчет и построение зоны прогноза, предупреждения и уклонения определенным образом, по результатам которого принимается решение соответственно о построении прогноза траектории постороннего воздушного судна, подают сигнал пилоту БПЛА о воздушном столкновении, и в случае бездействия осуществляют автоматическое построение маневра БПЛА и уход с траектории полета постороннего воздушного судна. Обеспечивается повышение безопасности полета БПЛА за счет возможности рассчитывать и осуществлять маневры уклонения от возможности столкновения с несколькими воздушными судами, движущимися в разных плоскостях и с разными скоростями. 4 ил.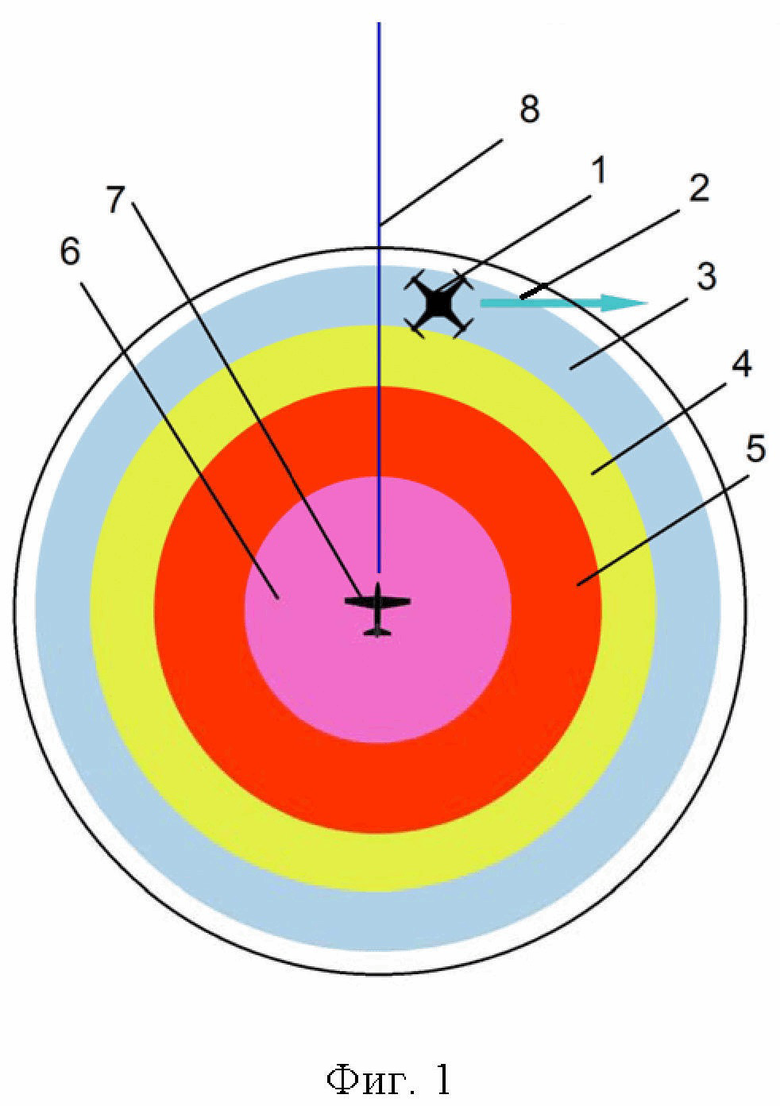
Способ предупреждения столкновения беспилотного летательного аппарата (БПЛА) с воздушным судном, характеризующийся тем, что содержит следующие этапы:
- получают информацию о местоположении, курсе и скорости постороннего воздушного судна, оборудованного системой АЗН-В,
- по актуальным данным осуществляют расчет и построение зоны прогноза, предупреждения и уклонения, при этом
- радиус зоны прогноза вычисляют по формуле:

где Rзпр - радиус зоны прогноза в метрах;
Uла - скорость постороннего воздушного судна относительно БПЛА в метрах,
- радиус зоны предупреждения вычисляют по формуле:

где Rзп - радиус зоны предупреждения в метрах,
- радиус зоны уклонения вычисляют по формуле:

где Rу - радиус зоны уклонения в метрах,
при этом минимальный радиус зоны прогноза 4000 метров и минимальный размер по высоте зоны прогноза 1500 метров; минимальный радиус зоны предупреждения 2000 метров и минимальный размер по высоте зоны предупреждения 800 метров; а минимальный радиус зоны уклонения 1000 метров и минимальный размер по высоте 500 метров,
- после вычисления Rзпр, Rзп и Rу принимается решение соответственно о построении прогноза траектории постороннего воздушного судна по актуальным данным, подаче сигнала пилоту БПЛА о воздушном столкновении, и в случае бездействия автоматическое построение маневра БПЛА и уход с траектории полета постороннего воздушного средства,
при этом БПЛА, оснащенный системой АЗН-В, принимает сигналы от ВС, получая данные о местоположении, высоте, направлении и скорости, а также передает в эфир сигналы БПЛА, отправляя данные о местоположении, высоте, направлении и скорости.
| СИСТЕМА РАЗДЕЛЕНИЯ ВОЗДУШНЫХ СУДОВ ПРИ ДВИЖЕНИИ | 2012 |
|
RU2601968C2 |
| EP 3091526 A2, 09.11.2016 | |||
| CN 107909856 A, 13.04.2018 | |||
| CN 105931497 A, 07.09.2016 | |||
| WO 2016070349 A1, 12.05.2016 | |||
| US 20170178516 A1, 22.06.2017. | |||

