Предлагаемое изобретение относится к беспилотному летательному аппарату, беспилотной авиационной системе и способу предотвращения столкновений при полете беспилотного летательного аппарата.
Беспилотные летательные аппараты завоевывают все большее значение как в военной области, так и для гражданских применений, например, для исследовательских целей. В беспилотных летательных аппаратах, как явствует из названия, отсутствует пилот для того, чтобы управлять летательным аппаратом. Все чаще летная эксплуатация является управляемой компьютером, например, на основании предварительно заданного маршрута. Кроме того, может быть предусмотрена связь с управляющей станцией для того, чтобы обеспечить дистанционное управление беспилотным летательным аппаратом. DE 19849857 С2 описывает, в качестве примера, способ дистанционного управления беспилотным летательным аппаратом, в котором с управляющей станции можно дистанционно управлять летательным аппаратом на траектории полета, отклоняясь от предварительно запрограммированного безопасного маршрута. При наличии грозящего столкновения с управляющей станции силами соответствующего оператора вручную может быть выполнен маневр уклонения. Однако выяснилось, что ручное выполнение маневра уклонения, например, из-за ошибок ввода, не всегда может предотвратить столкновение.
Поэтому существует потребность разработать беспилотный летательный аппарат с улучшенной системой уклонения от столкновений.
Это достигнуто посредством беспилотного летательного аппарата, беспилотной авиационной системы, а также способа предотвращения столкновений при полете беспилотного летательного аппарата согласно одному из независимых пунктов формулы изобретения. Примерные формы выполнения представлены в зависимых пунктах формулы изобретения.
Согласно приводимой в качестве примера форме выполнения изобретения предусмотрен беспилотный летательный аппарат, который имеет систему создания подъемной силы и тяги. Система управления полетом имеет блок управления полетом, навигационную систему, и систему силовых приводов. Блок управления полетом имеет устройство автопилота. Блок управления полетом предназначен для того, чтобы на основании данных навигационной системы и/или устройства автопилота рассчитывать управляющие команды, подаваемые в систему силовых приводов для управления системой создания подъемной силы и тяги. Кроме того, предусмотрена система предупреждения о столкновениях, которая связана с системой управления полетом, при этом система предупреждения о столкновениях регистрирует ситуацию столкновения и выдает данные по предотвращению столкновения. Между системой предупреждения о столкновениях и устройством автопилота предусмотрено соединение для того, чтобы на основании данных по предотвращению столкновения посредством устройства автопилота инициировать маневр уклонения.
Согласно изобретению предусмотрено устройство передачи данных для соединения с внешней управляющей станцией для управления и контроля полета беспилотного летательного аппарата. При этом устройство передачи данных снабжено устройством блокировки, с помощью которого предусмотрена возможность по меньшей мере временно блокировать выполнение маневра уклонения.
Например, может быть временно заблокирована связь между системой предупреждения о столкновениях и устройством автопилота. Блокировка связи между системой предупреждения о столкновениях и устройством автопилота может срабатывать от внешней управляющей станции. При этом возможности внешней управляющей станции по управлению полетом беспилотного летательного аппарата могут быть ограничены блокированием выполнения маневра уклонения. Согласно следующему примеру изобретения предусмотрена возможность деактивирования системы предупреждения о столкновениях посредством устройства блокировки.
Прекращение маневра уклонения также может выполняться посредством подачи в автопилот специального сигнала прерывания, то есть передача данных сохраняется и не прерывается, а, напротив, сигнал прерывания принимается устройством автопилота, при этом посредством этого возможно прекращение предусмотренного маневра уклонения.
Поэтому для примера выполнения беспилотного летательного аппарата с устройством передачи данных и устройством блокировки можно установить, что возможно подавать сигнал на беспилотный летательный аппарат извне, например через устройство передачи данных, при этом оно может быть уже используемым в иных целях устройством передачи данных для того, чтобы привести устройство автопилота к прекращению или, по меньшей мере временному, прерыванию маневра уклонения.
В том случае, если маневр уклонения еще не начат, подача сигнала на устройство блокировки воздействует на то, что автопилот активирован или же настроен так, что в случае зарегистрированной ситуации столкновения маневр уклонения не выполняется. Это может, например, происходить за счет того, что устройство предупреждения о столкновениях или же система предупреждения о столкновениях не выдает автопилоту соответствующий отображающий требуемый маневр уклонения сигнал. Но также возможно, что система предупреждения о столкновениях передает автопилоту соответствующую информацию о необходимости маневра уклонения, но там полученный сигнал не имеет никакого влияния, то есть, что маневр уклонения не начинается сразу же, по меньшей мере, до тех пор, пока присутствует соответствующий сигнал или же соответствующая инструкция, которые блокируют выполнение маневра уклонения.
В авиации ответственность за предотвращение столкновений делится на две области, для чего понятие "распределение" можно применить в отношении нескольких сфер: внешняя сфера предназначена для сортировки (разделения) летательных аппаратов более высокого уровня, в то время как внутренняя сфера предназначена для предотвращения столкновений, то есть для тех случаев, которые невозможно разрешить посредством сортирующей сферы. Сортировка производится в зависимости от актуального воздушного пространства и правил полетов, согласно которым эксплуатируются летательные аппараты, с помощью контролирующей воздушное сообщение инстанции (Air Traffic Control, АТС) или пилотом летательного аппарата с экипажем. Внутренняя сфера в летательном аппарате с экипажем всегда представлена пилотом. Для беспилотных летательных аппаратов согласно изобретению предоставляется техническое решение внутренней сферы предотвращения столкновений.
Согласно приводимой в качестве примера форме выполнения изобретения система предупреждения о столкновениях имеет по меньшей мере два эксплуатационных режима, при этом эксплуатационные режимы выполнены с возможностью автоматического активирования.
Согласно приводимой в качестве примера форме выполнения изобретения эксплуатационные режимы выполнены с возможностью автоматического активирования на основании эксплуатационных параметров летательного аппарата и/или на основании данных полета.
Например, выполнение маневра уклонения при активировании заданного эксплуатационного режима может быть, по меньшей мере временно, блокировано. Согласно следующему примеру в первом режиме в случае зарегистрированной ситуации столкновения могут вырабатываться и выдаваться предупреждения о столкновении и рекомендации по уклонению, во втором режиме в случае распознанной ситуации столкновения могут вырабатываться и выдаваться только предупреждения о столкновении, в третьем режиме в случае распознанной ситуации столкновения предупреждения о столкновении или рекомендации по уклонению могут не выдаваться.
Например, при выпуске шасси может активироваться эксплуатационный режим, в котором маневры уклонения блокированы. Например, при выпуске шасси предупреждения о столкновении только формируются и выдаются. Согласно следующему примеру изобретения при неисправности в системе силовых приводов и/или системе создания подъемной силы и тяги, например при неисправности двигательной установки, может активироваться эксплуатационный режим, в котором маневры уклонения блокированы, или эксплуатационный режим, в котором формируются и выдаются только предупреждения о столкновении.
Согласно следующему аспекту изобретения данные о предотвращении столкновения содержат инструкции к маневру уклонения, которые относятся к степени подъема/степени снижения летательного аппарата. Согласно следующему аспекту изобретения данные о предотвращении столкновения также содержат инструкции, которые относятся к изменению курса летательного аппарата. Согласно следующему аспекту изобретения инструкции могут относиться как к степени подъема/степени снижения, так и к изменению курса летательного аппарата.
Согласно приводимой в качестве примера форме выполнения изобретения при выходе из строя канала передачи данных система предупреждения о столкновениях выполнена с возможностью автоматического соединения с устройством автопилота, и в случае зарегистрированной ситуации столкновения и сформированных данных о предупреждении столкновения посредством устройства автопилота предусмотрена возможность автоматического выполнения маневра уклонения.
Это обеспечивает улучшенную безопасность при эксплуатации беспилотного летательного аппарата согласно изобретению, например, при обрыве линии передачи данных или при задержках передачи.
Задача изобретения также решена посредством беспилотной авиационной системы, которая имеет по меньшей мере один беспилотный летательный аппарат, по меньшей мере одну управляющую станцию, и канал передачи данных. Летательный аппарат выполнен в виде летательного аппарата по одному из вышеназванных примеров выполнения, аспектов или же примеров. Управляющая станция предназначена для управления и контроля полета беспилотного летательного аппарата. Предусмотрен канал передачи данных между управляющей станцией и беспилотным летательным аппаратом. Управляющая станция имеет устройство ввода, с помощью которого предусмотрена возможность формирования сигнала, передаваемого посредством канала передачи данных на беспилотный летательный аппарат для по меньшей мере временного блокирования выполнения беспилотным летательным аппаратом маневра уклонения.
В предлагаемой авиационной системе с помощью одной управляющей станции могут управляться один или несколько беспилотных летательных аппаратов. В предлагаемой авиационной системе также может быть предусмотрено соответственно по одной управляющей станции на один беспилотный летательный аппарат. В дальнейшем с целью упрощения описывается вариант с одной управляющей станцией и одним беспилотным летательным аппаратом, что, тем не менее, действует и для других вариантов комбинаций, в той мере, насколько это соответствует действительности.
Например, посредством одной управляющей станции через канал передачи данных может выполняться вмешательство в управляемый устройством автопилота маневр уклонения, например управляющее или регулирующее или же отменяющее.
Согласно приводимой в качестве примера форме выполнения изобретения управляющая станция имеет интерфейс человек-машина, на котором предусмотрен индикатор, при этом на индикаторе предусмотрена возможность отображения данных по предотвращению столкновения.
Согласно приводимой в качестве примера форме выполнения изобретения данные по предотвращению столкновения включают управляющие сигналы для маневра уклонения, которые выполнены с возможностью представления в виде текста.
Управляющие команды могут включать инструкции по степени подъема/степени снижения и/или изменения курса. К управляющим командам также могут отображаться разрешенные области. Данные по предотвращению столкновения могут иметь различные ступени указаний и/или предупредительные ступени, при этом ступени указаний и/или предупредительные ступени могут отображаться путем графического отображения управляющих команд. Например, может отображаться соответствующий активированный эксплуатационный режим.
Задача изобретения также решена посредством способа предотвращения столкновений при полете беспилотного летательного аппарата, включающего:
регистрацию ситуации столкновения с помощью системы предупреждения о столкновениях беспилотного летательного аппарата,
формирование данных по предотвращению столкновения посредством системы предупреждения о столкновениях,
передачу данных по предотвращению столкновения в устройство автопилота беспилотного летательного аппарата,
инициирование маневра уклонения посредством устройства автопилота,
прием беспилотным летательным аппаратом сигнала блокировки из внешней управляющей станции по каналу передачи данных,
осуществляемое по сигналу блокировки временное блокирование выполнения беспилотным летательным аппаратом маневра уклонения.
Согласно приводимой в качестве примера форме выполнения изобретения сигнал блокировки передается в устройство блокировки, и, по меньшей мере временно, блокирует маневр уклонения.
Например, сигнал блокировки приводит к тому, что связь системы предотвращения столкновений с устройством автопилота временно прерывается или же блокируется. При этом сигнал блокировки может быть единственной командой, принимаемой беспилотным летательным аппаратом от внешней управляющей станции.
Прерывание выполнения маневра уклонения может выполняться различными образами. Например, при поступающем через устройство передачи данных сигнале на активирование устройства блокировки маневра уклонения маневр уклонения немедленно завершается и производится управления направлением полета, которое приводит к постепенному возврату на прежнюю траекторию полета или же на предварительно заданный маршрут полета. Согласно другому примеру возврат на первоначально предусмотренную траекторию полета также может выполняться в максимально короткий промежуток времени, при этом промежуток времени ориентируется на возможные полетные маневры, при которых можно с достаточной надежностью избежать срыва потока. Согласно следующему примеру возвращение на первоначальную траекторию полета также может производиться к существенно более позднему моменту времени для того, чтобы максимально мало удлинить время полета. Инициирование прерывания маневра уклонения может, как уже обозначено, быть обусловлено прерыванием передачи данных, при этом посредством прерывания потока данных может производиться при физически сохраненном канале передачи данных или же путем фактического физического прерывания канала передачи данных, например путем разрыва кабельной связи.
Например, блокирующий канал приводит к тому, что беспилотный летательный аппарат снова возвращается на предварительно заданную траекторию полета и/или к цели. Например, беспилотный летательный аппарат может снова вернуться на первоначально запланированную траекторию.
Согласно приводимой в качестве примера форме выполнения изобретения блокирующий сигнал формируется управляющей станцией управления и контроля полетом беспилотного летательного аппарата и через канал передачи данных передается на беспилотный летательный аппарат.
Согласно приводимой в качестве примера форме выполнения изобретения при выходе из строя канала передачи данных система предупреждения о столкновениях автоматически соединяется с устройством автопилота, и в случае зарегистрированной ситуации столкновения и сформированных данных о предупреждении столкновения посредством устройства автопилота автоматически выполняет маневр уклонения.
Согласно следующему аспекту изобретения переключение на автопилот при прерванном соединении обеспечивает, что находящаяся на борту система предупреждения о столкновениях берет на себя задачу безопасной сети (функция "Safety Net") и в отношении летного режима беспилотного летательного аппарата не представляет собой обычного инструмента. И хотя для обеспечения необходимого расстояния между летательными аппаратами можно предусмотрительно выполнять воздействия на полет с управляющей станции, возможные задержки передачи данных, то есть соединения, представляют собой проблему. При обрыве передачи данных согласно изобретению обеспечивается выполнение маневра уклонения, так как это выполняется независимо от ручных вмешательств оператора. Автоматическое уклонение преимущественно также и поэтому, так как доступный для начала маневра уклонения бюджет времени очень ограничен, что также связано с тем, что излишние маневры уклонения нежелательны.
Например, беспилотный летательный аппарат имеет систему управления полетом, систему силовых приводов, и навигационную систему. Кроме того может быть предусмотрена система полетных данных. Блок управления полетом также включает в себя устройство автопилота. Блок управления полетом на основании данных из навигационной системы и устройства автопилота, а также, при определенных условиях, данных системы полетных данных, рассчитывает управляющие команды, которые подаются в систему силовых приводов для управления системой создания подъемной силы и тяги для управления полетом беспилотного летательного аппарата.
Например, устройство автопилота беспилотного летательного аппарата при завершении маневра уклонения, а также, при необходимости, при прерванном маневре уклонения, может производить возврат на предварительно заданный маршрут полета, то есть прокладку маршрута или траектории, и/или к цели.
Следует указать на то, что признаки примеров выполнения, форм выполнения, а также аспекты изобретения также действительны и для форм выполнения и аспектов или же примеров способа и наоборот. Кроме того, между собой могут свободно комбинироваться даже те признаки, относительно которых это отдельно не упомянуто.
Далее на основании приложенных чертежей примеры выполнения изобретения разъясняются подробнее. Показано:
Фиг. 1 - беспилотный летательный аппарат согласно первому примеру выполнения изобретения,
Фиг. 2 - следующий пример выполнения беспилотного летательного аппарата согласно изобретению,
Фиг. 3 - беспилотная авиационная система согласно примеру выполнения изобретения,
Фиг. 4 - устройство ввода для использования для беспилотного летательного аппарата согласно фиг. 3,
Фиг. 5 - управляющая станция для использования для беспилотного летательного аппарата согласно изобретению, например, согласно показанной на фиг. 3 авиационной системе,
Фиг. 6 - система предупреждения о столкновениях согласно изобретению для использования в беспилотном летательном аппарате согласно изобретению,
Фиг. 7 - способ предотвращения столкновений при полете беспилотного летательного аппарата согласно примеру выполнения изобретения,
Фиг. 8 - следующий пример выполнения соответствующего изобретению способа предотвращения столкновений при полете беспилотного летательного аппарата,
Фиг. 9 - следующий аспект примера выполнения для способа предотвращения столкновений при полете беспилотного летательного аппарата согласно изобретению,
Фиг. 10 - следующий пример выполнения соответствующего изобретению способа предотвращения столкновений при полете беспилотного летательного аппарата,
Фиг. 11 - схематичный обзор соответствующей изобретению системы и способа предотвращения столкновений при полете беспилотного летательного аппарата,
Фиг. 12 - следующий пример выполнения управляющей станции согласно изобретения для использования в соответствующей изобретению беспилотной авиационной системе,
Фиг. 13 - следующий аспект показанной на фиг. 12 управляющей станции,
Фиг. 14 - следующий аспект показанной на фиг. 12 и 13 управляющей станции, и
Фиг. 15 - следующий аспект соответствующей изобретению управляющей станции.
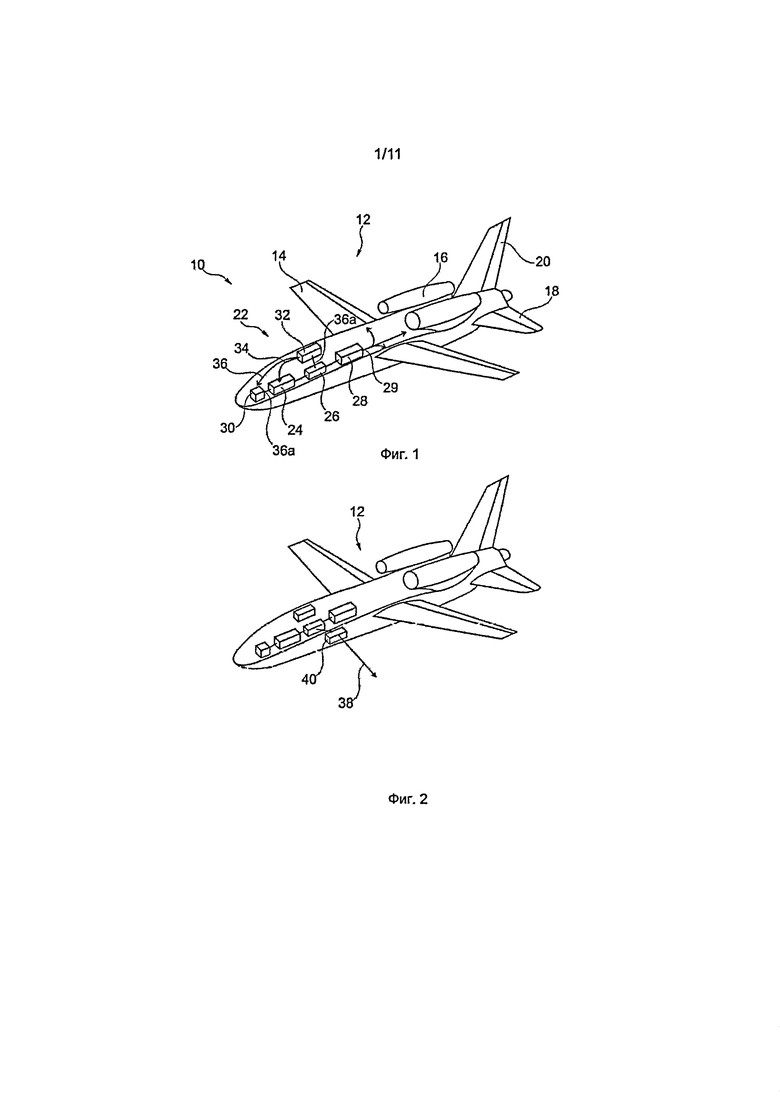
На фиг. 1 показан беспилотный летательный аппарат согласно первому примеру выполнения изобретения. Летательный аппарат 10 имеет систему 12 создания подъемной силы и тяги. В качестве примера, показана структура 14 несущих плоскостей в форме двух боковых крыльев как существенный признак системы создания подъемной силы. Также показаны две турбинных силовых установки 16, которые предусмотрены для необходимой тяги, кроме того в задней области показаны горизонтальное оперение 18, а также вертикальное оперение 20. Летательный аппарат 10 может иметь, например, похожую на самолетную конструкцию фюзеляжа, ссылочное обозначение для которого не предусмотрено.
В данном месте следует указать на то, что беспилотный летательный аппарат 10 согласно показанному примеру выполнения является беспилотным самолетом. Однако, изобретение также относится и к другим типам летательных аппаратов, к которым наряду с самолетами, также относятся, прежде всего, вертолеты или так называемые иные летательные аппараты с несущим винтом. Кроме того, изобретение касается воздушных судов, при которых привод обеспечивается не только конструкциями несущих плоскостей, по меньшей мере, не в существенной доле, но и несущим корпусом. Что касается вариантов тяги, то на фигурах для примера показана турбинная силовая установка или пара турбинных силовых установок, при этом следует отдельно указать на то, что, само собой разумеется, что также могут использоваться и другие варианты тяги, прежде всего, пропеллерные приводы, а также различные комбинации, а также различное количество используемых элементов. Также возможны и другие конструкции летательных аппаратов, такие как, например, так называемый самолет - "летающее крыло" или также другие системы создания подъемной силы, например роторы Флеттнера и его модификации.
Существенным для соответствующих изобретению беспилотных летательных аппаратов и различных форм их выполнения является то, что летательный аппарат 10 обладает устройством, которое обеспечивает, что летательный аппарат может летать по воздуху, и выполнен с возможностью управления в направлении полета. Понятие "направление полета" включает в себя как изменения направления по вертикали, то есть степени подъема и снижения, а также изменение направления по горизонтали, то есть изменения курса. Понятие "полет" должно действовать как для движений вперед, например, воздушного шара, что обычно связывается с понятием "движение". Поэтому изобретение также может быть применено и для конструкций воздушных шаров, в которых предусмотрены соответствующие выполненные с возможностью регулирования тяговые компоненты, и в которых также предусмотрены возможности регулирования подъемной силы для того, чтобы обеспечить описанную управляемость.
Возвращаясь назад к фиг. 1, кроме того, беспилотный летательный аппарат 10 имеет систему 22 управления полетом. Данная система 22 управления полетом имеет блок 24 управления полетом, навигационную систему 26, а также систему 28 силовых приводов. Названные признаки схематично обозначены боксами или же боксами, при этом следует явно указать на то, что навигационная система 26, а также блок 24 управления полетом также могут быть выполнены интегрированными. Кроме того система 28 силовых приводов показана схематично и включает в себя не показанные исполнительные элементы или же силовые приводы, а также управляющие линии или же сигнальные линии. В любом случае система силовых приводов отвечает за то, что беспилотный летательный аппарат 10 управляется посредством системы 12 создания подъемной силы и тяги. В соответствии с этим система силовых приводов включает в себя также и связь с тяговыми двигательными установками 16 наряду с не показанной подробнее механизацией крыла или прочими исполнительными элементами на несущих плоскостях 14, а также с рулем 18 высоты или же горизонтальным оперением, а также с вертикальным оперением 20 и т.п. Активирование названных элементов управления символически отображено на стрелочной структуре 29. Система силовых приводов перемещает, например, управляющие плоскости в приказанную позицию.
Кроме того, блок 24 управления полетом имеет устройство 30 автопилота. Блок 24 управления полетом предназначен для того, чтобы на основании данных навигационной системы 26 и/или устройства 30 автопилота рассчитывать управляющие команды, которые являются подаваемыми в систему силовых приводов для управления системой 12 создания подъемной силы и тяги. Связи или же каналы передачи данных между блоком 24 управления полетом, навигационной системой 26 и системой 28 силовых приводов, а также предоставление данных и управляющих команд из устройства 30 автопилота символьно отображено с помощью соединения между отдельными боксами на фиг. 1. Само собой разумеется, что данная связь может быть выполнена, например, посредством системы шин или прочих соединений через центральный блок управления.
Кроме того, согласно изобретению предусмотрена система 32 предупреждения о столкновениях, которая соединена с системой 22 управления полетом, что, впрочем, подробнее не показано. Система 32 предупреждения о столкновениях регистрирует ситуацию столкновения и выдает данные по предупреждению столкновения, что обозначено стрелкой 34.
Кроме того, предусмотрено соединение 36 между системой 32 предупреждения о столкновениях и устройством 30 автопилота для того, чтобы на основании данных по предотвращению столкновения посредством устройства 30 автопилота инициировать маневр уклонения. Связь 36 показана схематично и, само собой разумеется, также может осуществляться опосредовано, например посредством связи системы 32 предупреждения о столкновениях с блоком 24 управления полетом, что схематично показано ссылочным обозначением 36а. Кроме того может быть предусмотрено, что система 22 управления полетом имеет систему полетных данных, что, впрочем, не показано подробнее, что данные передаются в блок управления полетом для того, чтобы рассчитать управляющие команды.
Если, например, для связи системы предупреждения о столкновениях с блоком управления полетом, также называемым компьютером для управления полетом, предусмотрена система шин, то по данной системе шин могут передаваться соответствующие сообщения, с помощью которых система предупреждения о столкновениях сообщает компьютеру для управления полетом свой текущий статус. Это может быть распознанный конфликт с другим летательным аппаратом, отсутствие конфликтов, а также информация о том, что конфликт был успешно разрешен, или также информация о статусе самой системы предотвращения столкновений. Согласно следующему аспекту изобретения система предупреждения о столкновениях с системой управления полетом могут быть связаны в вышестоящий блок. Согласно следующему аспекту изобретения система предупреждения о столкновениях с системой управления полетом могут быть соединены в вышестоящий блок.
Система предупреждения о столкновениях может быть выполнена, например, как TCAS-система (англ. Traffic Collision Avoidance System - система предупреждения столкновения самолетов). В TCAS-системе система предупреждения о столкновениях беспилотного летательного аппарата посредством транспондеров обменивается информацией с другими воздушными судами в воздушном пространстве и на основании переданных данных определяет окружающую ситуацию движения для того, чтобы извлечь из нее возможные ситуации столкновения. Циклично вычисляемые TCAS-системой летательного аппарата параметры относительно других летательных аппаратов, например удаление, направление, скорость приближения, высота полета и степень подъема или же снижения, обеспечивают системе возможность предсказывания опасности столкновения.
На основании этих параметров TCAS определяет ближайшее сближение CPA (англ. Closest Point of Approach - ближайшая точка сближения) и промежуток времени (TAU), который необходим для того, чтобы достичь данного места в воздушном пространстве. Это подробнее разъясняется на основании фиг. 11.
Согласно следующему примеру выполнения, показанному на фиг. 2, предусмотрено устройство 38 передачи данных, которое схематично показано на фиг. 2 и предназначено для связи с управляющей станцией, не показанной, для управления и контроля полета беспилотного летательного аппарата. Устройство 38 передачи данных снабжено устройством 40 блокировки, также на борту беспилотного летательного аппарата 12, при этом посредством устройства 40 блокировки предусмотрена возможность, по меньшей мере временной, блокировки маневра уклонения.
Например, выполнение маневра блокировки может быть прервано или отменено. Согласно следующему примеру связь между системой предупреждения о столкновениях и устройством автопилота, по меньшей мере передача данных, может быть временно блокирована. Блокировка связи между системой предупреждения о столкновениях и устройством автопилота выполнена с возможностью инициации, например, посредством управляющей станции (не показана). Например, система 32 предупреждения о столкновениях выполнена с возможностью деактивирования посредством устройства 40 блокировки.
Согласно изобретению также предусмотрена беспилотная авиационная система, которая на фиг. 3 показана в первом примере выполнения. Беспилотная авиационная система 42 имеет по меньшей мере один беспилотный летательный аппарат 12 согласно одному из предшествующих примеров выполнения и аспектов. Кроме того, предусмотрена по меньшей мере одна управляющая станция 44 для управления и контроля полета беспилотного летательного аппарата 12, а также канал 38 передачи данных между управляющей станцией и беспилотным летательным аппаратом. Управляющая станция 44 имеет устройство 46 ввода, с помощью которого предусмотрена возможность формирования сигнала, который посредством канала 38 передачи данных выполнен с возможностью передачи на беспилотный летательный аппарат 12 для по меньшей мере временного блокирования выполнения беспилотным летательным аппаратом маневра уклонения. Сигнал схематично обозначен стрелкой 48.
Через канал 38 передачи данных оператор управляющей станции 44, например, наземной станции, может быть информирован о статусе системы предупреждения о столкновениях, например TCAS-системы, и имеет возможность по каналу передачи данных посредством определенной команды, которую определяет оператор на наземной управляющей станции и которая по каналу передачи данных посылается в бортовую систему беспилотного летательного аппарата, воздействовать на выполнение маневра уклонения, инициированного устройством предотвращения столкновений на борту беспилотного летательного аппарата.
Как правило, предусмотренная автоматическая активация системы предотвращения столкновений и рекомендация по уклонению, которые в автопилоте преобразуются в соответствующие управляющие команды, ведут к повышению безопасности беспилотных летательных аппаратов. Посредством описанной выше блокировки или же прекращения маневра уклонения оператор посредством, например, определенной выше команды, может деактивировать автоматическое выполнение.
Например, устройство 46 ввода является выполненной с возможностью активации панелью 50 на визуальном устройстве 52 отображения, что схематично показано на фиг. 4. Например, выполненная с возможностью активации панель 50 может быть выполнена путем перемещения не показанного подробнее курсора и щелчка кнопки мыши. Кроме того, возможно выполнить имеющую возможность активации панель 50 в виде чувствительной к прикосновениям панели на экране, например на сенсорном экране.
Согласно изобретению предусмотрено предоставить беспилотную авиационную систему, в которой управляющая станция 44 через канал 38 передачи данных может вмешиваться в управляемый устройством автопилота маневр уклонения, например управляя или регулируя, или блокировать маневр уклонения.
Согласно следующему аспекту изобретения результат системы предупреждения о столкновениях, то есть данные по предотвращению столкновения или же информация о ситуациях столкновений, может передаваться на управляющую станцию, например на наземную управляющую станцию, и там отображаться на индикаторе, например в виде символов или текстовой информации.
На фиг. 5 на следующем примере выполнения показано, что управляющая станция может иметь интерфейс 54 человек-машина, который снабжен индикатором 56, при этом на индикаторе предусмотрена возможность отображения данных 58 по предотвращению столкновения, при этом данные 58 по предупреждению столкновений также содержат управляющие команды 60 для маневра уклонения, которые являются отображаемыми в виде текста.
Например, управляющие команды 60 содержат инструкции по степени подъема/снижения и/или изменению курса. Кроме того, к управляющим командам 60 возможно отображать разрешенные области.
Согласно следующему, не показанному примеру возможно, что данные по предупреждению столкновений имеют различные ступени указаний и/или предупредительные ступени, при этом ступени указаний и/или предупредительные ступени могут отображаться путем графического отображения управляющих команд.
Согласно следующему аспекту изобретения система 32 предупреждения о столкновениях имеет по меньшей мере два эксплуатационных режима, которые выполнены с возможностью автоматического активирования. Это подробнее разъясняется на основании фиг. 6. Система 32 предупреждения о столкновениях схематично обозначена с помощью бокса. С помощью двух боковых стрелок 62, 64 показано, что система 32 предупреждения о столкновениях может переходить в первый режим 66 и во второй режим 68. Например, в первом режиме 66 в случае определенной ситуации столкновения формируются и выдаются предупреждения 70 о столкновении и рекомендации 72 по уклонению, что показано дополнительной стрелкой 74, которая направлена на бокс 76. Например, во втором режиме 68 в случае определенной ситуации столкновения формируются и выдаются только предупреждения 70 о столкновении, что показано с помощью второй горизонтальной стрелки 78, которая заканчивается в боксе 80. Предупреждения 70 о столкновении могут содержать в себе, например, предупреждения о движении. Кроме того может быть предусмотрен третий режим 82, в котором в случае определенной ситуации столкновения предупреждения о столкновении или рекомендации по уклонению не выдаются. Для этого предусмотрена третья стрелка 84.
Согласно следующему аспекту изобретения, который также показан в связи с фиг. 6, но который не является обязательно необходимым, эксплуатационные режимы, например, три режима 66, 68, 82, выполнены с возможностью автоматической активизации на основании эксплуатационных параметров летательного аппарата и/или на основании полетных данных, для чего на фиг. 6 показан следующий бокс 86, от которого в направлении системы 32 предупреждения о столкновениях идет дополнительная стрелка 88, которая предназначена для отображения поступления параметров или же данных в систему. Полетные данные могут включать в себя, например, срабатывание подачи сигнала при пролете определенных точек маршрута.
Например, при выпуске шасси может активироваться эксплуатационный режим, в котором маневры уклонения блокированы, что подробнее не показано. Например, при выпуске шасси также может активироваться эксплуатационный режим, в котором формируются и выдаются только предупреждения о столкновении. Согласно следующему примеру при выпуске шасси может активироваться эксплуатационный режим, в котором не формируются и не выдаются ни предупреждения о столкновении, ни рекомендации по уклонению. Кроме того при неисправности в системе силовых приводов и/или системе создания подъемной силы и тяги, например в двигательной установке, возможно активировать эксплуатационный режим, в котором маневры уклонения блокированы, или эксплуатационный режим, в котором формируются и выдаются только предупреждения о столкновении, или эксплуатационный режим, в котором не формируются и не выдаются ни предупреждения о столкновении, ни рекомендации по уклонению.
Как уже упоминалось, данные по предотвращению столкновения, например рекомендации 72 по уклонению, могут содержать инструкции по маневру уклонения, которые также касаются степени подъема/степени снижения беспилотного самолета или же беспилотного летательного аппарата. Например, также возможно для того, чтобы данные по предотвращению столкновения с инструкциями для маневра уклонения касались изменения курса летательного аппарата. Само собой разумеется, что инструкции также могут включать в себя оба аспекта.
Согласно следующему аспекту изобретения предусмотрено, что при активации заданного эксплуатационного режим выполнение маневра уклонения может быть временно блокировано. Например, это может быть установлено для третьего эксплуатационного режима 82. Кроме того, возможно перекрывать показанный эксплуатационный режим другим эксплуатационным режимом, то есть соответствующая выдачи либо предупреждений о столкновении и рекомендаций по уклонению, как в первом эксплуатационном режиме 66, или выдача только предупреждений о столкновении, как во втором эксплуатационном режиме 68, и одновременно предусмотреть, что система автопилота или же устройство 30 автопилота не выполняет маневр уклонения или же в случае уже находящегося в выполнении маневра уклонения прерывает или же прекращает его.
Изменение эксплуатационного режим системы предупреждения о столкновениях происходит, например, на борту автономно, базируясь на информации о состоянии беспилотного летательного аппарата, например на плане полета беспилотного летательного аппарата.
Автоматическое изменение эксплуатационного режима системы предупреждения о столкновениях может производиться, например, посредством системы управления полетом с помощью заранее запрограммированных и сохраненных в плане полета беспилотного летательного аппарата триггерных точек, например активация свойств точек маршрута, которые были определены оператором в рамках планирования миссии. Следующая возможность также заключается в том, что на эксплуатационный режим воздействует изменение фаз полета, например при взлете или при заходе на посадку.
Если, например, система предупреждения о столкновениях сообщает блоку управления полетом рекомендацию по уклонению, то система управления полетом проверяет это на непротиворечивость. Если в системе управления полетом активировано проведение запрошенного маневра уклонения, то она отдает команду функции управления полетом на применение запрошенных системой предупреждения о столкновениях скорости подъема/скорости снижения и/или изменения курса вместе с требованием переключить ее в соответствующий режим для выполнения инструкции по скорости подъема или снижения или же изменению курса.
Если система предупреждения о столкновениях сообщает, например, "clear of conflict" или оператор дает команду беспилотному летательному аппарату на прекращение маневра уклонения, то система управления полетом дает команду управлению полетом снова активировать стандартный режим.
Если функция управления полетом получает команду на скорость подъема/снижения, то функция продольного управления переключается в соответствующий режим. При этом горизонтальное управление беспилотным летательным аппаратом не должно затрагиваться и следует далее предварительно заданным путевыми точками маршрутом полета, как если бы функция управления полетом не получала команды на изменение направления. Если активируется режим стандартного управления, то управление полетом следует предварительно заданным путевыми точками маршруту полета. Если в результате предшествующего маневра уклонения возникла разность по высоте между заданным значением и фактической позицией беспилотного летательного аппарата, то беспилотный летательный аппарат направляется назад на предварительно заданную высоту.
На фиг. 7 схематично показаны основные шаги соответствующего изобретению способа 200 предотвращения столкновений беспилотного летательного аппарата. Способ 200 включает в себя следующие шаги: на шаге 210 регистрации регистрируется ситуация 212 столкновения беспилотного летательного аппарата. Затем предусмотрено формирование 214 данных 216 по предотвращению столкновения посредством системы предупреждения о столкновениях. Затем происходит подача 218 данных по предотвращению столкновения в устройство автопилота беспилотного летательного аппарата. В завершение инициируется 222 маневр 220 уклонения устройством автопилота.
Тем самым, беспилотный летательный аппарат в состоянии в случае предстоящего столкновения зарегистрировать ситуацию 212 столкновения и посредством выполнения маневра 220 уклонения устройством автопилота на борту беспилотного летательного аппарата предотвратить столкновение.
Согласно следующему примеру выполнения изобретения предусмотрено, что сигнал 224 блокировки, как показано на фиг. 7, подается в устройство 226 блокировки, что показано стрелкой 228. Устройство 226 блокировки воздействует на то, что маневр 220 уклонения, по меньшей мере временно, блокируется, при этом на фиг. 8 блокировка обозначена разрывом 230 соединительной линии 232 между боксом 218 и боксом 222. Обеспечение, по меньшей мере временного, блокировки схематично показано стрелкой 234, которая направлена от устройства 226 блокировки в направлении соединительной линии или же разорванной соединительной линии 232.
В этом месте следует указать на то, что воздействие устройства блокировки также может быть предусмотрено в других местах способа. Например, уже воздействие на систему предупреждения о столкновениях может блокировать выработку данных по предупреждению столкновений, так что выполнение маневра уклонения произойти не может. В любом случае сигнал блокировки приводит к тому, что согласно примеру связь системы предупреждения о столкновениях с устройством автопилота временно прерывается, например путем прерывания передачи данных, а также, например, путем фактического физического разрыва соединительной линии, как уже было обозначено выше.
Согласно следующему аспекту изобретения предусмотрен способ, который показан на фиг. 9, в котором сигнал блокировки формируется управляющей станцией 236 управления и контроля полета беспилотного летательного аппарата, что показано ссылочным обозначением 238, и по линии 240 передачи данных подается в беспилотный летательный аппарат, как схематично показано на фиг. 9 с помощью прямоугольника 242.
Согласно аспекту изобретения также возможно предусмотреть показанную на фиг. 8 выработку блокирующего сигнала 224 на борту беспилотного летательного аппарата. Согласно схематично показанному на фиг. 9 примеру выполнения изобретения предусмотрено, что соединительный сигнал формируется вне беспилотного летательного аппарата, например посредством управляющей станции 236, и подается на беспилотный летательный аппарат 242 по линии 240 передачи данных.
Управляющая станция может находиться, например, на земле, или также внутри отдельного летательного аппарата в воздухе. Следует указать на то, что управляющая станция может быть предусмотрена как неподвижно установленной, так и стационарной, то есть мобильной. Кроме того, согласно изобретению предусмотрен пример выполнения, в котором управляющая станция находится на борту плавучего транспортного средства, например судна или подводной лодки, или же на борту мобильной или неподвижно установленной плавучей платформы, что также действительно для закрепленных на якоре или же установленных на опоры платформ над водой и также управляющих станций под водой.
Согласно следующему примеру выполнения изобретения, показан на фиг. 10, предусмотрен способ, в котором при выходе из строя линии 240 передачи данных между управляющей станцией 236 и беспилотным летательным аппаратом 242 система предупреждения о столкновениях автоматически соединяется с устройством автопилота и, в случае зарегистрированной ситуации столкновения и сформированных данных по предотвращению столкновения, устройство автопилота автоматически выполняет маневр уклонения. Для этого на фиг. 10 беспилотный летательный аппарат 242 показан в заштрихованной внешней рамке, в пределах которой первый бокс 244 обозначает систему предупреждения о столкновениях, а второй бокс 246 - устройство автопилота. Автоматическое соединение отображено соединительной линией 248 между системой 244 предупреждения о столкновениях и устройством 246 автопилота. Другой бокс 250 должен показывать проведение маневра уклонения, при этом маневр уклонения показан внутри дополнительного бокса 250 ссылочным обозначением 252. Разрыв, то есть выход из строя линии 240 передачи данных, символьно обозначен восклицательным знаком 254, с помощью которого соединительная линия 240 между управляющей станцией 236 и летательным аппаратом визуально прервана.
Само собой разумеется, что выход из строя 254 линии 240 передачи данных может представлять собой полный выход из строя, например, связи по радиоканалу, а также с помехами, но все же поддерживаемую связь по радиоканалу.
Согласно показанному на фиг. 10 примерному способу обеспечивается, что беспилотный летательный аппарат 242 на основе автоматического выполнения маневра уклонения может избежать столкновения и в том случае, если вмешательство со стороны управляющей станции больше невозможно, так как линия передачи данных оборвана или же прервана. Поэтому возможно воздействовать с управляющей станции вручную на выполнение маневра уклонения, например, подавить его или же вручную выполнить по-другому без риска столкновения при обрыве канала передачи данных, так как в подобном случае маневр уклонения выполняется автоматически.
Со ссылкой на фиг. 10 следует пояснить, что показанная связь 240 системы 244 предупреждения о столкновениях с устройством 246 автопилота является каналом передачи данных, который может быть предусмотрен как непосредственно между обоими компонентами или же блоками, так и опосредовано посредством уже показанных на фиг. 1 взаимосвязей системы управления полетом.
Как уже упоминалось выше, может быть предусмотрен способ, в котором устройство автопилота по завершению маневра уклонения возвращает беспилотный летательный аппарат на заданный заранее маршрут и/или к заданной заранее цели.
Описанная выше возможность со стороны оператора или же эксплуатационного персонала через управляющую станцию вмешиваться в автоматическое выполнение маневра уклонения согласно изобретению также может быть обозначена как алгоритм Opt-Out. Автоматическое обратное переключение на автопилот или же при предусмотренных маневрах уклонения инициирование маневров уклонения при прерванной линии передачи данных обеспечивает, что беспилотный летательный аппарат всегда в состоянии избежать столкновения с другими, имеющими транспондеры объектами, например другими летательными аппаратами. Благодаря этому возможна эксплуатация беспилотных летательных аппаратов в воздушных пространствах классов А, В и С, а также D со специальными процедурами. В этом месте следует указать на то, что алгоритм Opt-Out для названного последним аспекта не является непосредственной предпосылкой, а лишь представляет дополнительную возможность контроля.
На фиг. 11 схематично показан беспилотный летательный аппарат 110 согласно изобретению. Кроме того, схематично показан самолет 111, который движется в направлении беспилотного летательного аппарата 110. Вокруг беспилотного летательного аппарата 110 посредством временных интервалов до столкновения определены защитные зоны. Временные интервалы схематично показаны в нижней области с помощью стрелок 113 расстояния.
Например, первая увеличенная защитная зона 115 вокруг беспилотного летательного аппарата 110 показана для удаления в 20 морских (навигационных) миль (м. миль), а также вторая защитная зона 117 в 3,3 м. мили и третья защитная зона 119 в 2,1 м. мили. Следует указать на то, что названные значения являются примерными пороговыми значениями, которые могут быть предварительно заданы с помощью системы, например, TCAS.
Например, в пределах второй защитной зоны 117 формируется и выдается лишь предупреждение о столкновении, которое показано на фиг. 11 буквами ТА для "Traffic Advisory".
В третьей защитной зоне 119 формируется и выдается рекомендация по уклонению, показана буквами RA для "Resolution Advisory". На фиг. 11 в нижней зоне показана описанная выше ситуация в схематичном сечении по вертикали в дополнение к показанному выше виду по горизонтали. Как видно, беспилотный летательный аппарат 110, а также самолет 11, двигаются друг к другу, так что грозит опасность столкновения. При этом защитные зоны охватывают область под и над высотой полета самолета, которая обозначена горизонтальной линией 121.
На фиг. 12 показан фрагмент уже упомянутого устройства 46 ввода, которое предусмотрено на управляющей станции для того, чтобы контролировать полет беспилотного летательного аппарата и также управлять им. Показан пример выполнения уже упомянутого индикатора 56 интерфейса человек-машина, называемого также Human Machine Interface (HMI). На фиг. 12 показан индикатор 56 в форме экрана 110, на котором в относительно центральной позиции находится первая область 112, на которой в центре двух концентрических окружностей 114 и 116 находится символ 118 беспилотного летательного аппарата. Окружности предназначены для оценки удаления пилотом и также называются кольцами дальности. Беспилотный летательный аппарат 118 в направлении своего полета имеет линию 120 направления полета и проходящую перпендикулярно этому показанную пунктиром линию 122. Внутри внешней окружности 114 обеих концентрических окружностей также предусмотрены метки 124 сторон горизонта.
Окружающие самолеты ("Intruder" на языке TCAS) показаны относительно колец дальности, например посредством символа в форме круга 126, стоящего на острие квадрата 128 или заполненного квадрата 130. Символика может быть взята, например, из TCAS.
Другие дополнительные данные, которые отображаются на индикаторе 110, подробнее разъясняться не будут.
Следует лишь упомянуть, что, например, справа от области предупреждения столкновения изображен компас 132, а также в находящейся в левом верхнем углу области - искусственный горизонт 134.
Далее имеются, например, такие данные, как индикатор 136 количества топлива, индикатор 138 гидросистемы, индикатор 140 состояния шасси, а также помимо всего прочего, индикатор 142 масла с температурой масла и давлением масла. Кроме того, вблизи компаса над ним изображены данные высотомера 144, а также индикация 146 скорости. В верхнем правом углу находится поле для настройки идентификатора 148 транспондера. Дополнительное содержание изображения следует понимать лишь как примерное. Это не влияет на изображение системы предупреждения о столкновении и может классифицироваться независимо от этого.
Далее согласно изобретению предусмотрено, что в случае выявленной ситуации столкновения данные о предотвращении столкновения изображаются в форме рекомендации по уклонению. Для этого внутри средней зоны 112 с различными защитными зонами и находящимся в центре беспилотным летательным аппаратом 118 предусмотрена зона 150 передачи информации о столкновении, которая выполнена, например, как легко распознаваемая, проходящая поперечно зона 152 в форме полосы. Данные по предотвращению столкновения, как уже упомянуто, могут иметь управляющие команды, которые выполнены с возможностью отображения в виде текста 154.
Например, на фиг. 12 показана инструкция "TCAS Climb 1500 ft/min" для того, чтобы обеспечить оператору, который находится на управляющей станции, возможность сначала воспринять эту информацию или данные.
При существующем канале передачи данных на летательный аппарат оператор может ввести соответствующую управляющую команду через поля ввода показанного на экране интерфейса. Так как согласно изобретению предусмотрено, что кроме случая деактивированного оператором режима автопилотного маневра уклонения автопилотом всегда производится автоматическое выполнение маневра уклонения, оператор получает те данные, которые выполняет система автопилота на борту беспилотного летательного аппарата.
Согласно одному аспекту ручной ввод управляющих команд не предусмотрен. Индикация предупреждений TCAS предназначена для информирования оператора, то есть для осознания им ситуации, который в противном случае мог бы неправильно понять (выполняемое не по его команде) увеличение высоты или снижение своего беспилотного летательного аппарата как сбой автопилота. Поэтому оператор может, если считает это необходимым, отменить маневр уклонения.
Например, изображение 152 в форме полосы может быть выделено цветом, например красным, для того, чтобы тем самым указать на вторую ступень предупреждения или указания, на которой в случае активированного или же не деактивированного автопилота происходит выполнение маневра уклонения.
Если, например, не предвидится никакой критической ситуации, то есть система предупреждения о столкновениях не выявила никакой ситуации столкновения, то в качестве дополнительной опции может быть предусмотрено, что индикация в форме полосы выделяется, например, зеленым цветом и без текста или же, возможно, с текстом о том, что ситуация предупреждения отсутствует. В случае успешно выполненного маневра уклонения, то есть "clear of conflict", изображение 152 полосы может быть выделено зеленым, что, однако, не показано подробнее.
В связи с так называемой философией "Dark and Silent Cockpit", в которой отдельно отображаются лишь отклонения от заданного состояния, может быть предусмотрен отказ от отдельной индикации о том, что конфликт отсутствует, в этом случае предназначенные для индикации предупреждений поля остаются просто черными/темными, то есть индикации не происходит.
Как уже упомянуто, в связи с показанными на фиг. 12 и также на фиг. 13 текстовыми индикациями соответствующего маневра уклонения, также дополнительно могут отображаться соответствующие разрешенные области, что приводит к тому, что вся необходимая для оценки маневра уклонения информация интегрировано показана визуально и текстом.
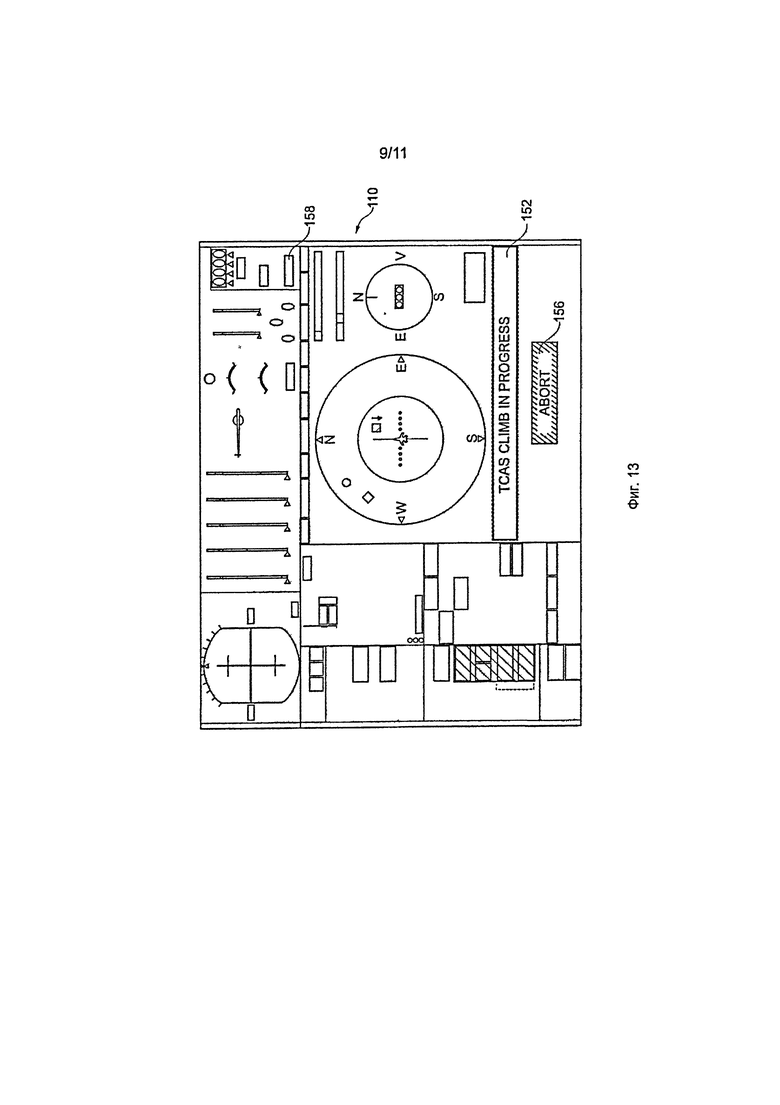
На фиг. 13 показана следующая форма выполнения индикатора 110 согласно фиг. 12, поэтому для одинаковых изображений ссылочные обозначения повторно не назначаются. В этом случае полоса 152 также выделена красным цветом и имеет другую текстовую информацию, а именно информацию о том, что беспилотный летательный аппарат находится в процессе набора высоты, что показано индикатором "TCAS Climb in Progress".
При существующем канале передачи данных между управляющей станцией и беспилотным летательным аппаратом существует кроме того возможность выработки не показанного далее сигнала, что, впрочем, неоднократно упоминалось выше, который посредством канала передачи данных может передаваться на беспилотный летательный аппарат для того, чтобы вызвать, по меньшей мере временную, блокировку выполнения маневра уклонения.
Это может, например, выполняться посредством обозначенного термином "ABORT" поля 156, которое может активироваться, например, щелчком кнопкой мыши для того, чтобы отменить находящийся в осуществлении маневр уклонения, а именно набор высоты. Кнопка отмены или же поле 156 отмены обеспечивает явную отмену маневра уклонения. Если это производится путем обратного переключения или же активации так называемого пониженного эксплуатационного режима системы предупреждения о столкновениях, так что рекомендации по уклонению больше не формируются, то функция автоматического уклонения посредством этого также деактивируется, то есть это представляет собой скрытую отмену маневра уклонения.
Кроме того, как уже упоминалось, согласно изобретению предусмотрено, что прерывание линии передачи данных между управляющей станцией и беспилотным летательным аппаратом автоматически приводит к тому, что автопилот на борту беспилотного летательного аппарата снова начинает маневр уклонения, если это еще требуется. Тем самым обеспечивается, что хотя оператор с помощью управляющей станции и может вмешиваться в происходящее, то есть управление, на борту беспилотного летательного аппарата, для чего он, например, прерывает процесс уклонения, но в том случае, если у оператора отсутствует контроль над беспилотным летательным аппаратом, а именно, если оборвана линия передачи данных или прервана или позволяет осуществлять лишь неполную передачу данных, то беспилотный летательный аппарат снова может вернуться в безопасный режим, а именно автоматического выполнения маневра уклонения посредством автопилота.
На фиг. 14 показан следующий аспект индикатора 110. Имеющая форму полосы область 152 показана, например, оранжевым цветом, который существенно отличается от красного на изображениях фиг. 12 и фиг. 13. В качестве текстовой информации показано слово "Traffic", что указывает на ситуацию столкновения, однако представляет собой лишь предупреждение о столкновении, а не рекомендацию по уклонению, как это происходит на изображениях на фиг. 12 и 13.
И хотя в пределах внутренней защитной зоны 116 системой предупреждения о столкновениях выявлен летательный аппарат, выдается лишь предупреждение о столкновении, так как система предупреждения о столкновениях находится в эксплуатационном режиме, в котором выдаются только предупреждения о столкновении. Это показано с помощью индикатора 158 в правой верхней области дисплея 110, в которой находится информация "ТА only", что указывает на то, что отображены только предупреждения о столкновении. В отличие от этого, на фиг. 12 и фиг. 13 устройство 158 индикации настроено на эксплуатационный режим TA/RA системы предупреждения о столкновениях, то есть отображены предупреждения о столкновении и, если требуется, также и рекомендации по уклонению.
Как уже упоминалось, оператор посредством имеющего возможность активации индикатора 110 может настраивать эксплуатационный режим посредством устройства отображения, которое одновременно является управляющим устройством, если существует канал передачи данных к беспилотному летательному аппарату.
Например, происходит автоматическое переключение на безопасный режим работы системы предупреждения о столкновениях, то есть выдачу предупреждений о столкновении и рекомендаций по уклонению и последующего подключения системы автопилота к выполнению маневра уклонения, так что он при обрыве канала передачи данных вновь активируется для того, чтобы постоянно обеспечивать безопасный режим полета беспилотного летательного аппарата.
Помимо этого, также возможно, что сам беспилотный летательный аппарат оснащен соответствующим устройством ввода данных для того, чтобы на основании эксплуатационных параметров летательного аппарата, то есть беспилотного летательного аппарата, и/или на основании полетных данных автоматически активировать эксплуатационные режимы. В случае существующего канала передачи данных эта информация затем передается на управляющую станцию и там предпринимается соответствующая индикация 158.
Согласно следующему аспекту изобретения может быть предусмотрено выделение информации предупреждения о столкновении вместе с символом беспилотного летательного аппарата 118 также вместе с отображением карты, как это примерно показано на фиг. 15. Центральным аспектом комбинации с отображением (топографической) карты является то, что могут активно выявляться возможные конфликты с окружающей местностью, которые могут возникать вследствие горизонтальных или вертикальных рекомендаций по уклонению, прежде всего в горных регионах. В беспилотном летательном аппарате согласно изобретению это предоставляет возможность выявления и анализа подобных конфликтов, если, например, фактически доступная ширина полосы пропускания канала передачи данных не обеспечивает передачу видео в режиме реального времени. В данном изображении также используется похожая символика, в этом случае дополненная заполненным и стоящим на острие квадратом 160.
Описанные выше примеры выполнения могут комбинироваться различными способами. Прежде всего, также могут использоваться аспекты устройств для форм выполнения способа, а также использования устройств и наоборот.
Дополнительно к этому следует указать, что "всеохватывающий" не исключает других элементов или шагов, а "одна" или "один" не исключает множественного числа. Далее следует указать на то, что признаки или шаги, которые описаны со ссылкой на один из приведенных выше примеров выполнения или аспектов, также могут использоваться и в комбинации с другими признаками или шагами других описанных выше примеров выполнения и аспектов. Ссылочные обозначения в пунктах формулы изобретения не следует рассматривать как ограничение.









Группа изобретений относится к беспилотной авиационной системе, беспилотному летательному аппарату и способу предотвращения столкновений при его полете. Беспилотный летательный аппарат содержит систему создания подъемной силы и тяги, систему управления полетом, систему предупреждения столкновений. Система управления полетом содержит блок управления с автопилотом, навигационную систему, систему силовых приводов, устройство передачи данных внешней управляющей станции. Беспилотная авиационная система содержит беспилотный летательный аппарат, управляющую станцию с устройством ввода, канал передачи данных. Для предотвращения столкновений при полете беспилотного летательного аппарата осуществляют регистрацию ситуации столкновения, формируют и передают данные по предотвращению столкновения в устройство автопилота, с помощью которого инициируют маневр уклонения. При получении сигнала блокировки из внешней управляющей станции блокируют маневр уклонения и возвращают беспилотный летательный аппарат на первоначальную траекторию. Обеспечивается автоматическое уклонение беспилотного летательного аппарата от столкновения. 3 н. и 10 з.п. ф-лы, 15 ил.
1. Беспилотный летательный аппарат (10), имеющий:
- систему (12) создания подъемной силы и тяги,
- систему (22) управления полетом, включающую в себя блок (24) управления полетом, навигационную систему (26) и систему (28) силовых приводов, при этом блок управления полетом имеет устройство (30) автопилота и предназначен для того, чтобы на основании данных навигационной системы и/или устройства автопилота рассчитывать управляющие команды, подаваемые в систему силовых приводов для управления системой создания подъемной силы и тяги,
при этом предусмотрена система (32) предупреждения о столкновениях, связанная с системой управления полетом и выполненная с возможностью регистрации ситуации столкновения и выдачи данных (34) по предотвращению столкновения,
при этом предусмотрено соединение (36) между системой предупреждения о столкновениях и устройством автопилота для того, чтобы на основании данных по предотвращению столкновения посредством устройства автопилота инициировать маневр уклонения,
при этом предусмотрено устройство (38) передачи данных для соединения беспилотного летательного аппарата с внешней управляющей станцией для управления и контроля полета беспилотного летательного аппарата, и устройство передачи данных снабжено устройством (40) блокировки, с помощью которого предусмотрена возможность по меньшей мере временно блокировать выполнение маневра уклонения.
2. Беспилотный летательный аппарат по п. 1, в котором система (32) предупреждения о столкновениях имеет по меньшей мере два эксплуатационных режима (66, 68), автоматически активируемых на основании эксплуатационных параметров летательного аппарата и/или на основании данных (86) полета.
3. Беспилотный летательный аппарат по п. 1 или 2, в котором при выходе из строя канала передачи данных система предупреждения о столкновениях выполнена с возможностью автоматического соединения с устройством автопилота, и при этом в случае зарегистрированной ситуации столкновения и сформированных данных по предотвращению столкновения посредством устройства автопилота предусмотрена возможность автоматического выполнения маневра уклонения.
4. Беспилотный летательный аппарат по п. 1 или 2, в котором возможности внешней управляющей станции по управлению полетом беспилотного летательного аппарата ограничены блокированием выполнения маневра уклонения.
5. Беспилотный летательный аппарат по п. 1 или 2, в котором при временном блокировании выполнения маневра уклонения устройством (40) блокировки беспилотный летательный аппарат возвращается на первоначальную траекторию полета.
6. Беспилотная авиационная система (42), включающая в себя:
- по меньшей мере один беспилотный летательный аппарат (12) по одному из предшествующих пунктов,
- по меньшей мере одну управляющую станцию (44) для управления и контроля полета по меньшей мере одного беспилотного летательного аппарата, и
- канал (38) передачи данных между управляющей станцией и по меньшей мере одним беспилотным летательным аппаратом,
при этом управляющая станция имеет устройство (46) ввода, с помощью которого предусмотрена возможность формирования сигнала (48), передаваемого посредством канала передачи данных на беспилотный летательный аппарат для по меньшей мере временного блокирования выполнения беспилотным летательным аппаратом маневра уклонения.
7. Беспилотная авиационная система по п. 6, при этом управляющая станция имеет интерфейс (54) человек-машина, который снабжен индикатором (56), при этом на индикаторе предусмотрена возможность отображения данных (58) по предотвращению столкновения, при этом данные по предотвращению столкновения имеют управляющие команды (60) для маневра уклонения, которые выполнены с возможностью отображения в виде текста.
8. Беспилотная авиационная система по п. 6 или 7, в которой возможности внешней управляющей станции по управлению полетом беспилотного летательного аппарата ограничены блокированием выполнения маневра уклонения.
9. Беспилотная авиационная система по п. 6 или 7, в которой по сигналу (48), передаваемому посредством канала передачи данных на беспилотный летательный аппарат для по меньшей мере временного блокирования выполнения маневра уклонения, по меньшей мере один беспилотный летательный аппарат возвращается на первоначальную траекторию полета.
10. Способ предотвращения столкновений при полете беспилотного летательного аппарата, включающий:
регистрацию ситуации столкновения с помощью системы предупреждения о столкновениях беспилотного летательного аппарата,
формирование данных по предотвращению столкновения посредством системы предупреждения о столкновениях,
передачу данных по предотвращению столкновения в устройство автопилота беспилотного летательного аппарата,
инициирование маневра уклонения посредством устройства автопилота,
прием беспилотным летательным аппаратом сигнала блокировки из внешней управляющей станции по каналу передачи данных,
осуществляемое по сигналу блокировки временное блокирование выполнения беспилотным летательным аппаратом маневра уклонения.
11. Способ по п. 10, в котором при выходе из строя канала передачи данных система предупреждения о столкновениях автоматически соединяется с устройством автопилота, и в случае зарегистрированной ситуации столкновения и сформированных данных по предотвращению столкновения устройство автопилота автоматически выполняет маневр уклонения.
12. Способ по п. 10 или 11, в котором сигнал блокировки является единственной командой, принимаемой беспилотным летательным аппаратом от внешней управляющей станции.
13. Способ по п. 10 или 11, в котором временное блокирование выполнения маневра уклонения включает в себя возвращение беспилотного летательного аппарата на первоначальную траекторию полета.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ ФАЗОВЫХ ПРОНИЦАЕМОСТЕЙ В ПОРИСТОЙ СРЕДЕ | 2010 |
|
RU2442133C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА РАДИОУПРАВЛЯЕМОЙ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2319191C1 |

