Область техники, к которой относится изобретение
Изобретение относится главным образом к устройствам управления процессом и, более конкретно, к системе и способу управления устройствами управления процессом, имеющим несколько механизмов управления с обратной связью.
Уровень техники
Для управления узлом клапан/привод и другими устройствами управления процессом можно использовать разнообразные механизмы управления. Например, контроллеры клапанов обычно используют управление с обратной связью для управления узлом клапан/привод. Управление с обратной связью основано на сигнале ошибки, который, в свою очередь, основывается на разнице между желаемым сигналом уставки и сигналом обратной связи от датчика, причем сигнал обратной связи обеспечивает отображение работы узла клапан/привод. Выходной сигнал контроллера клапана является корректирующим сигналом управления, который в прошлом являлся пневматическим сигналом, пропорциональным сигналу ошибки.
Хотя пневматически управляемые приводы остаются распространенными, обычные устройства управления также включают в себя непневматические элементы, так что пневматические сигналы обычно задаются электронными контроллерами, датчиками или преобразователями (например, цифровым контроллером клапана). Более конкретно, электронный контроллер выполняет программу управления, которая обрабатывает сигнал ошибки с целью получения сигнала управления, который можно преобразовать в токовый или другой аналоговый сигнал управления, который, в свою очередь, подается в электропневматический конвертер, такой как преобразователь «ток-давление» в контроллере клапана, для получения пневматического сигнала. Такой сигнал управления, аналоговый или цифровой, далее в настоящей заявке в определенных случаях будет именоваться ведущим сигналом.
В большинстве случаев ведущий сигнал генерируется с помощью одного из трех типов управляющих алгоритмов: (i) пропорционального; (ii) пропорционально-дифференциального; (iii) пропорционально-дифференциально-интегрального. Пропорциональный (Р) тип управляющего алгоритма генерирует ведущий сигнал прямо пропорциональным сигналу ошибки. Пропорционально-дифференциальный (proportional plus derivative, PD, ПД) тип управляющего алгоритма генерирует ведущий сигнал, являющийся суммой сигнала, пропорционального сигналу ошибки, и сигнала, пропорционального скорости изменения сигнала ошибки. Пропорционально-дифференциально-интегральный (proportional plus derivative plus integral, PDI, ПИД) тип управляющего алгоритма генерирует ведущий сигнал, являющийся суммой сигнала, пропорционального сигналу ошибки, сигнала, пропорционального скорости изменения сигнала ошибки, и сигнала, пропорционального интегралу сигнала ошибки.
Сигнал обратной связи, задающий сигнал ошибки, может прямо или косвенно отражать работу узла клапан/привод. Например, одна из индикаций потока через узел клапан/привод задействует датчик положения, который генерирует сигнал, указывающий положение клапана. С этой целью в конструкцию узла клапан/привод часто включают механическое соединение между датчиком положения и клапаном для определения положения клапана. Этот датчик положения затем прикрепляют к механическому соединению для генерации сигнала положения клапана. Про систему с таким механизмом управления с обратной связью, основанным на датчике положения, часто говорят как про основанную на управлении положением.
Контроллеры для клапанов с пневматически управляемым приводом используют датчик давления как альтернативу управлению положением. В этом случае датчик давления обеспечивает индикацию потока через клапан, поскольку привод узла клапан/привод снабжен пружиной, сжатие которой приблизительно пропорционально прилагаемому к ней давлению. Про такой механизм управления часто говорят как про управление давлением.
Более старые контроллеры, в особенности те, что предшествовали микрокомпьютерам, чаще основывались на управлении давлением, чем на управлении положением. По мере модернизации этих систем, некоторые компоненты систем управления менялись или усовершенствовались с целью включения элементов цифрового управления. Например, элемент пневматического управления давлением для клапана мог бы быть заменен цифровым контроллером. Чтобы избежать остановки процесса, а то и всего предприятия, новый цифровой контроллер клапана включал управление давлением для упрощения процедуры замены и установки. Таким образом, более старое пневматическое управление можно было заменить без замены или модификации узла клапан/привод. В результате замена старого пневматического устройства и сопутствующая этому установка нового цифрового контроллера обходилась без нарушения или остановки работы клапана или, в более общем смысле, всего процесса. Такая процедура замены и установки известна как горячее переключение.
Примером цифрового контроллера, который выполнен с возможностью горячего переключения, является цифровой контроллер клапана FIELDVUE™ серии DVC5000, а именно DVC5000f, с версией прошивки 9, производимый компанией EmersonProcess Management - Fisher (Marshalltown, Iowa). DVC5000f включает датчик давления и соответствующую программу управления давлением для возможности горячего переключения. Контроллер DVC5000f также включает датчик положения и возможность выбора управления положением для установок, совместимых с управлением положением. Как указывалось выше, многие установки, предполагающие замену, не поддерживают управление положением. В таких случаях, установка механических соединений между клапаном и датчиком положения может потребовать либо замены, либо переделки клапана и, вероятнее всего, остановки процесса. В результате, DVC5000f может быть сначала установлен с управлением давлением в качестве рабочего механизма с обратной связью. Когда процесс или предприятие остановят, узел клапан/привод можно было бы сконфигурировать для управления положением. Таким образом, установка и использование контроллера DVC5000f зачастую представляла собой двухэтапную процедуру, включающую первоначальный этап горячего переключения на управление давлением, за которым следовал выбор управления положением по установке связей и других механических компонентов и/или компонентов клапана во время прекращения работы. Чтобы сделать возможным ручной выбор управления положением, интерфейс, предоставленный оператору, предусматривал опцию замены параметра управления и, таким образом, переключение от управления давлением к управлению положением.
Во время нормальной работы управление клапаном посредством обратной связи по положению предпочтительнее других механизмов обратной связи, которые более опосредованно отображают работу клапана. К сожалению, управление, использующее исключительно обратную связь по положению, полностью зависит от определяющего положение механизма, который может выходить из строя. Прежние цифровые контроллеры клапана не обеспечивали непрерывную работу клапана при возникновении подобных неисправностей или других непредвиденных обстоятельств, связанных с неисправностью датчика положения. В результате, как следствие природы управления с обратной связью, клапан может прийти в нерабочее состояние из-за неисправного датчика, несмотря на исправное состояние клапана в других отношениях. Клапан же, в свою очередь, оказавшись в нерабочем состоянии, может вызвать нежелательную и ненужную остановку процесса или предприятия.
Раскрытие изобретения
В соответствии с одним аспектом настоящего изобретения предлагается контроллер для устройства управления процессом с первым и вторым датчиками, генерирующими соответствующую информацию обратной связи, отражающую работу устройства управления процессом. Контроллер содержит первый модуль сервоуправления, генерирующий первый ведущий сигнал на основе информации обратной связи от первого датчика для управления устройством управления процессом согласно первому режиму управления; второй модуль сервоуправления, генерирующий второй ведущий сигнал на основе информации обратной связи от второго датчика для управления устройством управления процессом согласно второму режиму управления. Контроллер далее включает модуль передачи управления с обратной связью для передачи управления работой устройства управления процессом из первого режима управления во второй режим управления на основе информации обратной связи от первого датчика.
В некоторых вариантах осуществления модуль передачи управления с обратной связью включает модуль определения неисправности, выполненный с возможностью определения того, что информация обратной связи от первого датчика неудовлетворительно отражает работу устройства управления процессом. Модуль передачи управления с обратной связью может быть выполнен с возможностью реагирования на команду пользователя инициировать передачу управления устройством управления процессом из первого режима управления во второй режим управления.
Модуль передачи управления с обратной связью может включать память, осуществляющую запись информации обратной связи от первого датчика. Далее, модуль передачи управления с обратной связью выполнен с возможностью извлечения части информации обратной связи, отражающей неповрежденные данные, недавно полученные от первого датчика. Второй модуль сервоуправления может далее содержать компонент интегрального контроллера с выходным сигналом, регулируемым на основе части информации обратной связи, отражающей неповрежденные данные, с целью минимизации прерывистого движения устройства управления процессом при передаче управления устройством управления процессом из первого режима управления во второй режим управления.
В некоторых случаях, модуль передачи управления с обратной связью и второй модуль сервоуправления регулируют второй ведущий сигнал на основе первого ведущего сигнала при подготовке передачи управления с обратной связью устройства управления процессом из первого режима управления во второй режим управления. Второй ведущий сигнал можно отрегулировать так, что при передаче управления с обратной связью первый и второй ведущие сигналы равны. Второй модуль управления сервоприводом может включать компонент в виде интегрального контроллера, выходной сигнал которого отрегулирован так, что при подготовке передачи управления с обратной связью второй ведущий сигнал равен сигналу управления. Компонент в виде интегрального контроллера может включать накапливающий сумматор, и этот накапливающий сумматор можно сбрасывать для регулировки второго ведущего сигнала при подготовке передачи управления с обратной связью. В качестве альтернативы или дополнительно, второй модуль сервоуправления непрерывно вычисляет поправку на основе сигнала управления для использования при регулировке второго ведущего сигнала в случае команды от модуля передачи управления с обратной связью.
В соответствии с другим аспектом настоящего изобретения, предлагается способ управления устройством управления процессом, включающий этапы генерации первого ведущего сигнала для управления устройством управления процессом в соответствии с первым режимом сервоуправления, генерации второго ведущего сигнала для управления устройством управления процессом в соответствии с вторым режимом сервоуправления и генерации сигнала управления для устройства управления процессом из первого ведущего сигнала в соответствии с первым режимом сервоуправления. Указанный способ далее включает в себя этапы получения первого сигнала обратной связи, отражающего работу устройства управления процессом, в ответ на сигнал управления, и передачи управления устройством управления процессом во второй режим сервоуправления во время работы устройства управления процессом на основе сигнала обратной связи так, что сигнал управления будет генерироваться из второго ведущего сигнала.
В некоторых вариантах осуществления, этап передачи управления включает этап определения наличия неисправности в работе устройства управления процессом. Этап определения наличия неисправности может включать этап анализа первого сигнала обратной связи, чтобы определить, отказал ли датчик устройства управления процессом, соответствующий первому режиму сервоуправления. Этапы анализа обратной связи, определения наличия неисправности и передачи управления можно выполнять автономно.
Первый и второй режимы управления сервоприводом могут реагировать, соответственно, на сигналы датчиков положения и давления устройства управления процессом. И в этом, и в других случаях, способ может дополнительно включать этап осуществления записи данных первого сигнала обратной связи, так что этап передачи управления включает этап извлечения из записи данных информации, отражающей неповрежденные данные из датчика (например, данные о положении из датчика положения).
В некоторых случаях этап генерации второго ведущего сигнала включает этап инициализации второго ведущего сигнала на основе первого сигнала обратной связи. Этап инициализации второго ведущего сигнала может включать в себя вычисление переходного значения для первого ведущего сигнала на основе первого сигнала обратной связи. Этап инициализации второго ведущего сигнала может включать этап регулировки выхода интегрального контроллера, относящегося ко второму режиму сервоуправления на основе переходного значения для первого ведущего сигнала. Этап регулировки интегрального контроллера может включать этап установки второго ведущего сигнала равным первому ведущему сигналу.
Альтернативно или дополнительно, описанный здесь способ может далее включать этап получения второго сигнала обратной связи, отражающего работу устройства управления процессом. Этап передачи управления может затем включать этап генерации переходного уровня сигнала управления на основе первого сигнала обратной связи, а этап генерации второго ведущего сигнала может включать этап вычисления начального уровня второго ведущего сигнала на основе второго сигнала обратной связи и переходного уровня сигнала управления. Этап вычисления начального уровня может затем включать этап вычисления значений пропорционального и дифференциального контроллеров из второго сигнала обратной связи, а также этап сброса выхода накапливающего сумматора интегрального контроллера, относящегося ко второму режиму сервоуправления, на основе разницы между переходным уровнем сигнала управления и суммой значений пропорционального и дифференциального контроллеров.
В соответствии с еще одним аспектом настоящего изобретения, предлагается способ управления устройством управления процессом с первым и вторым датчиками, генерирующими соответствующую информацию обратной связи, отражающую работу устройства управления процессом. Первый ведущий сигнал генерируется на основе информации обратной связи от первого датчика и подается в устройство управления процессом для управления работой устройства управления процессом. Управление устройством управления процессом передается второму ведущему сигналу на основе второго датчика посредством первоначальной генерации второго ведущего сигнала на основе первого ведущего сигнала.
Краткое описание чертежей
Для более полного понимания описанного здесь контроллера и способа, нужно рассмотреть последующее подробное описание и сопутствующие чертежи, где:
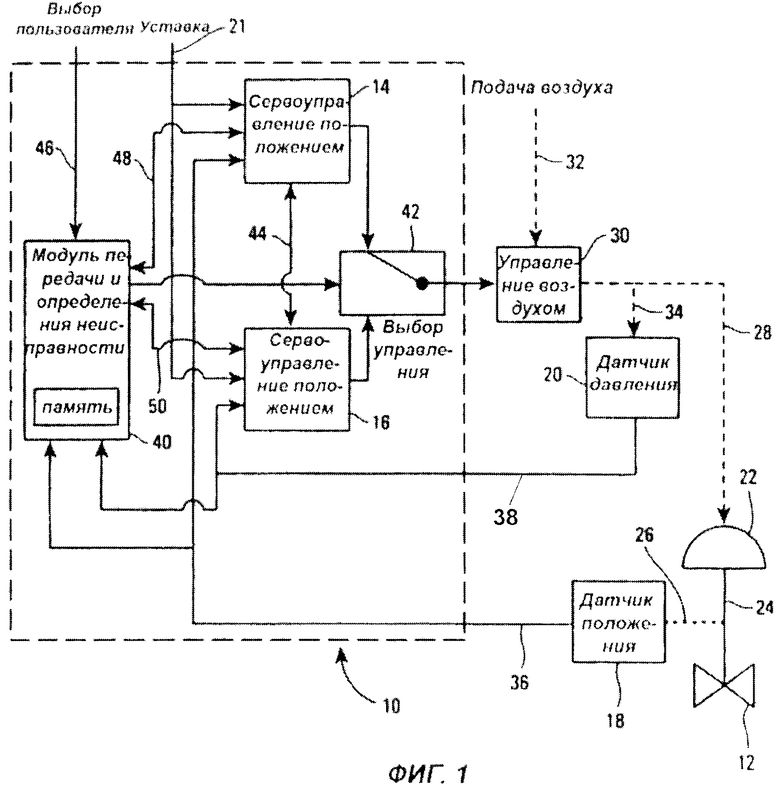
Фиг.1 показывает блок-схему контроллера, соединенного с узлом клапан/привод для управления узлом клапан/привод в соответствии с одним из вариантов настоящего изобретения.
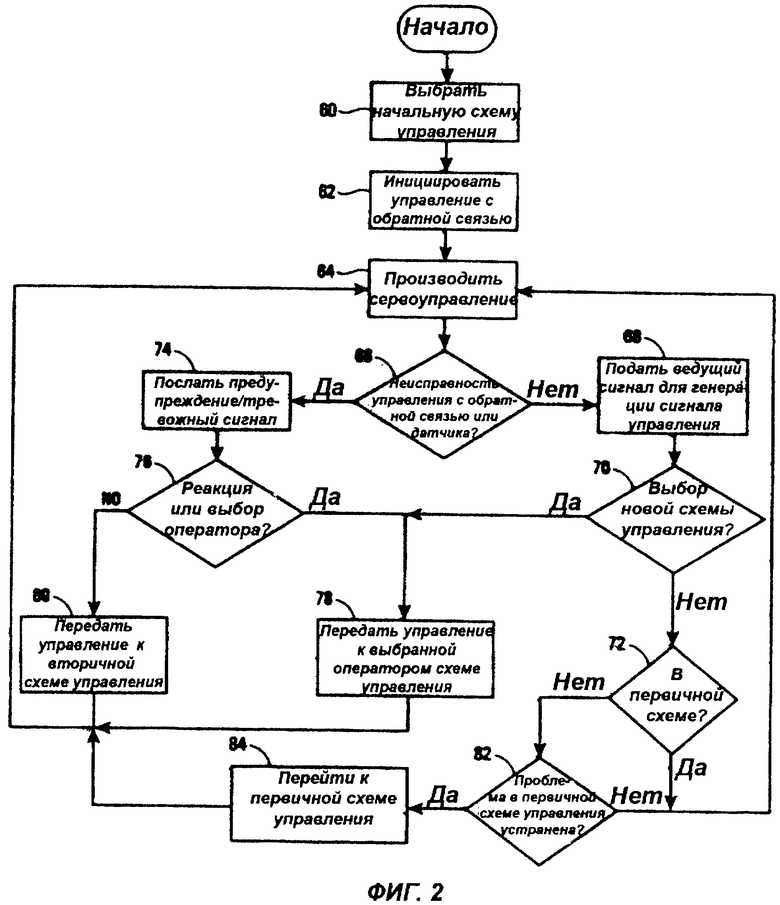
Фиг.2 показывает структурную схему программы управления с обратной связью, исполняемой контроллером, изображенным на фиг.1, в соответствии с одним из вариантов настоящего изобретения.
Фиг.3 показывает блок-схему пары модулей сервоуправления контроллера, показанного на фиг.1 в соответствии с одним из вариантов настоящего изобретения, выполненных с возможностью исполнения программы передачи управления с обратной связью для плавной передачи управления.
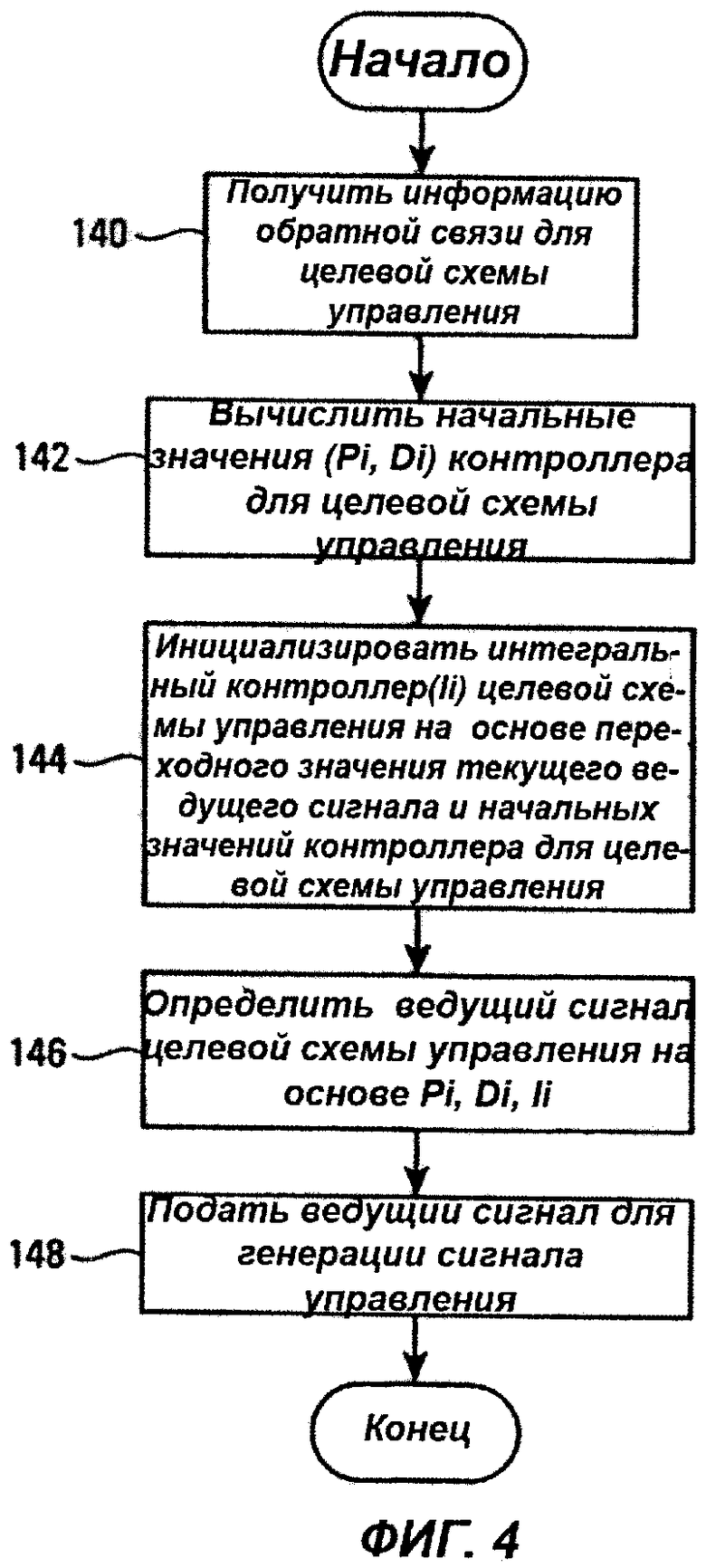
Фиг.4 изображает структурную схему программы передачи управления с обратной связью, исполняемой контроллером, показанным на фиг.1 в целом, и, в частности, парой модулей сервоуправления, показанной на фиг.3, в соответствии с одним из вариантов настоящего изобретения.
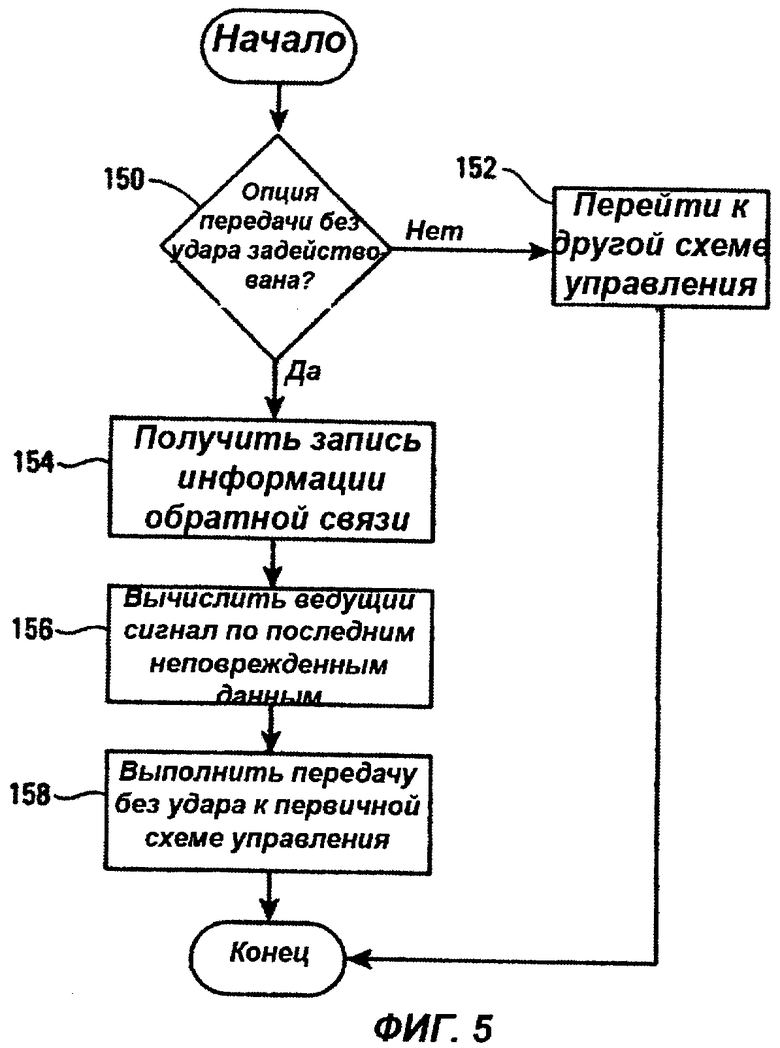
Фиг.5 изображает структурную схему, показывающую часть программы передачи управления с обратной связью, исполняемой контроллером, изображенным на фиг.1, в соответствии с другим вариантом настоящего изобретения.
Хотя описанные здесь контроллер и способ допускают воплощение в различных формах, на чертежах проиллюстрированы (и будут здесь описаны) конкретные варианты осуществления настоящего изобретения, причем, данное описание следует считать иллюстративным и никоим образом не ограничивающим настоящее изобретение конкретными воплощениями, описанными и проиллюстрированными здесь.
Осуществление изобретения
Описанные контроллер и способ главным образом относятся к механизмам управления с обратной связью для устройства управления процессом, такого как клапан. Хотя предложенные контроллер и способ подробно описаны в связи с пневматически приводимым в действие клапаном, предложенные контроллер и способ подходят для использования и применения с клапанами, приводимыми в действие иными средствами, и иными устройствами управления процессом, помимо клапанов. Соответственно, предложенные контроллер и способ могут быть использованы или применяться в соединении с любым устройством в сети управления процессом и в особенности хорошо подходят для использования с устройствами, которые имеют два или более возможных механизмов обратной связи, доступных для управления. Примерные варианты осуществления, описанные здесь, представляют контроллер и способ в контексте передачи управления с обратной связью между двумя различными механизмами управления, хотя использование предлагаемого контроллера и способа применительно к управлению с двумя обратными связями одного типа или сходных типов также является возможным. Соответственно, и в качестве примера, раскрытые контроллер и способ можно использовать в ситуациях, когда присутствует управление с обратной связью на основе двух датчиков одного и того же типа (например, прямой или первичный датчик положения и резервный или вторичный датчик положения).
Вообще говоря, контроллер и способ, описанные здесь, полезны в контексте передачи управления с обратной связью для устройства управления процессом. Описанные контроллер и способ также практически полезны для обеспечения (i) непрерывной работы устройства управления процессом в случае неисправности, связанной с механизмом управления с обратной связью, и (ii) плавной работы устройства управления процессом во время каждой такой передачи управления с обратной связью. В тех случаях, когда такую передачу управления можно выполнить плавно, непрерывно и/или без прерываний, можно избежать остановки или иной помехи технологическому процессу Хотя предлагаемые контроллер и способ выполнены с поддержкой такой непрерывной работы в случае отказов и других неисправностей, использование контроллера и способа не ограничивается любым конкретным контекстом или обстоятельствами для передачи управления с обратной связью. На самом деле, в определенных вариантах передача управления с обратной связью может быть инициирована и управляться, полностью или частично, по усмотрению оператора.
Передача управления с обратной связью в соответствии с предлагаемыми контроллером и способом основана на информации обратной связи, генерируемой датчиком, который используется текущей схемой управления с обратной связью, т.е. датчик пытается отобразить работу клапана до момента передачи управления. То есть, передача управления опирается на информацию обратной связи, которую генерирует датчик, используемый текущей схемой управления с обратной связью. Например, передача управления с обратной связью может запускаться вследствие аналитического или иного определения того, что информация обратной связи более не отражает достаточно удовлетворительно работу клапана. В этом случае передача управления с обратной связью будет вполне оправданной, прежде чем клапан перейдет в неправильное положение или состояние, основанное на ошибочной информации обратной связи. Другой тип передачи, реализуемый предлагаемыми здесь контроллером и способом, в целом предполагает использование информации обратной связи для того, чтобы удостовериться, что последующая или целевая схема управления с обратной связью первоначально помещает клапан в точку, близкую или совпадающую с той, где оставила клапан прежняя или первоначальная схема управления с обратной связью. С этой целью целевая схема управления с обратной связью регулируется для плавной работы клапана, независимо от того, приведет ли соответствующий датчик, действующий в изоляции, к генерации сигнала ошибки (и ведущего сигнала), который мог бы резко и/или внезапно передвинуть клапан при передаче управления. В качестве альтернативы, если текущая схема управления с обратной связью находится под подозрением, что работает на основании ошибочной информации обратной связи, как в случае с неисправным датчиком, то передача управления может задействовать целевую схему управления с обратной связью, которая отрегулирована с целью помещения клапана в точке, соответствующей последней информации обратной связи, про которую известно, что она достоверна (в отличие от самой последней информации обратной связи, соответствующей положению, где первоначальная схема управления с обратной связью могла прекратить действовать). И если первая передача действительно вызвана неисправным датчиком или другим неправильно работающим устройством, то, в общем, контроллер и способ могут быть использованы для обеспечения плавной второй передачи обратно к первоначальной схеме управления с обратной связью после того, как неисправный датчик или другое устройство будет заменен или отремонтирован.
Примерный контроллер, способный реализовать передачу управления с обратной связью между различными механизмами управления с обратной связью, в целом отмечен как 10. В некоторых случаях, контроллер 10 является цифровым контроллером клапана, имеющим встроенное программное обеспечение или код для реализации различных схем управления с обратной связью для клапана 12. Как будет объяснено далее, контроллер 10 может включать многочисленные модули сервоуправления для выполнения двух или более программ управления с обратной связью для управления клапаном 12. Контроллер 10 и каждый из его модулей сервоуправления могут быть реализованы посредством цифрового компьютера на базе микропроцессора, выполненного с возможностью выполнения программного обеспечения или кода, соответствующего схемам и программам управления с обратной связью. В этом примере, модуль 14 сервоуправления положением и модуль 16 сервоуправления давлением получают информацию обратной связи, отражающую работу клапана 12 посредством сигналов обратной связи, генерируемых датчиком 18 положения и датчиком 20 давления, соответственно. Датчик 18 положения предоставляет информацию обратной связи, прямо отражающую положение клапана 12 или ход клапана, тогда как датчик 20 давления предоставляет информацию обратной связи, косвенно отражающую положение клапана 12 из-за того, каким образом производится движение клапана.
Модули 14 и 16 сервоуправления положением и давлением также получают данные, отражающие уставку для клапана 12, изображенные на фиг.1 как входной сигнал для контроллера 10 по линии 21. Следует заметить, что контроллер 10 включает любое оборудование ввода/вывода (не показано) и, в более общем смысле, любые функциональные средства, подходящие для интерпретации данных, предоставляемых по линии 21, или сигналов, предоставляемых датчиком 18 положения, датчиком 20 давления и любыми другими подключенными к контроллеру устройствами. Такое оборудование и функциональные средства хорошо известны специалистам в этой области и не будут здесь описываться подробно, за исключением того замечания, что указанный контроллер 10 может быть также выполнен с возможностью исполнения любых подходящих преобразований, таких, например, как аналогово-цифровое преобразование при подготовке к цифровой обработке.
Работа клапана 12 не будет описываться подробно, ввиду того, что природа клапана 12 не имеет отношения к использованию предлагаемых контроллера и способа. В действительности, клапан 12 может быть любым устройством управления процессом, подлежащим управлению посредством обратной связи, и особенно таким устройством, работу которого можно независимо контролировать двумя или более датчиками. Такой независимый контроль клапана 12 или любого другого устройства, в данном случае посредством датчика 18 положения и датчика 20 давления, делает возможными две независимые схемы управления. В общем, две или более схемы управления необязательно представляют собой различные типы схем управления; вместо этого, они могут иметь определенное дублирование в виде двух или более датчиков одного типа.
Независимо от природы схем управления, работа клапана 12 в любой данный момент времени опирается на выполнение одной из схем управления, приводящих в действие привод 22. Для сохранения энергии между передачами управления, контроллер 10 может ограничивать выполнение в любой данный момент времени одной схемой управления (т.е. схемой, ответственной за приведение в действие привода 22), но в более общем смысле, одновременно можно выполнять любое количество схем управления с целью, например, избежания задержек во время передачи управления. Привод 22, в свою очередь, обеспечивает механическую силу, необходимую для изменения положения или состояния клапана 12. Клапан 12 и привод 22 вместе образуют узел клапан/привод, имеющий механический соединительный элемент 24, соединяющий клапан 12 с приводом 22. Вообще говоря, механический соединительный элемент 24 и другие компоненты привода 22 превращают входную силу в механическую силу, необходимую для перемещения клапана 12. Датчик 18 положения может быть связан с данными компонентами активатора, такими, например, как механический соединительный элемент 24, или с любым другим компонентом узла клапан/привод, чтобы определять положение клапана 12. Например, датчик 18 положения может быть структурно связан с узлом клапан/привод посредством механической связи 26 (как показано пунктиром на фиг.1), хотя любой другой вид связи (например, оптический), известный специалистам в этой области, также может быть использован.
В данном примерном варианте, привод 22 включает подпружиненный компонент (не показан), к которому прилагается пневматическая сила через пневматическую линию 28, показанную, как и другие пневматические линии, пунктиром на фиг.1. Воздух или другая текучая среда в линии 28 поступает из устройства 30 управления воздухом, которое может включать преобразователь «ток-давление» и другие обычные компоненты для пневматического управления, такие, например, как реле или другой компонент для увеличения давления воздуха, подаваемого по линии 32.
Подпружиненная компонента привода 32, на которую действует пневматическая сила, смещается в соответствии с эффективным коэффициентом упругости привода 22. Это смещение, в свою очередь, можно сопоставить с положением клапана 12 на основании механического соединительного элемента 24 и любых других промежуточных компонентов. В результате, давление текучей среды в линии 28 можно использовать для индикации потока, проходящего через клапан, хотя лишь косвенно. Из-за косвенной природы такого отражения положения клапана, данные, генерируемые датчиком 20 давления, могут не быть столь точными, по сравнению с данными, полученными другими способами, таким, например, как измерение положения. Таким образом, датчик 20 давления и соответствующий модуль 16 сервоуправления давлением могут играть вторичную (или не первичную) роль в контроллере 10 для использования, например, как резерв (или возврат) для одной или более других схем управления с обратной связью.
Датчик 18 положения и датчик 20 давления подают соответствующие сигналы обратной связи по линиям 36 и 38 обратно в контроллер 10. Два сигнала обратной связи формируют два механизма управления с обратной связью, первичный механизм для нормальной работы и вторичный механизм для резервного режима работы или для возврата к исходному режиму работы. Сигнал обратной связи с самой высокой точностью или имеющий наибольшее предпочтение, в данном случае сигнал по линии 36 от датчика 18 положения, может являться определяющим в отношении того, какой из механизмов управления с обратной связью служит в качестве первичного механизма. В данном случае, первичный механизм управления с обратной связью включает выполнение модулем 14 сервоуправления положением программы управления положением. Такое выполнение может продолжаться, например, пока датчик 18 положения и схема управления положением работают нормально (например, в пределах спецификации датчика 18 положения 18 и/или иным образом обеспечивая точное отображение положения клапана). В том случае, когда датчик 18 положения больше не обеспечивает точное отображение положения клапана, или есть подозрение, что схема управления положением работает неправильно по какой-то причине, контроллер 10 может переключиться на вторичный механизм управления, т.е. программу управления давлением, выполняемую модулем 16 сервоуправления давлением. Таким образом, контроллер 10 обеспечивает работу клапана и тем самым избегает остановки работы технологического процесса или предприятия, где используется клапан 12.
Каждый сигнал обратной связи подается в модуль 40 передачи и определения неисправности для определения неисправности датчика или другой неполадки в управлении с обратной связью. Как показано на фиг.1, модуль 40 передачи и определения неисправности может содержать память для хранения прошлых значений каждого сигнала обратной связи, как и других данных или информации, отражающей работу двух схем управления с обратной связью, как будет описано далее. Модуль 40 передачи и определения неисправности генерирует сигнал управления, способный переключить переключатель 42 выбора управления контроллера 10 в случае определения неисправности или неполадки. Таким образом, в качестве примера, автономное решение перейти от управления положением, т.е. от первичной схемы управления, к схеме управления давлением основано на том, продолжает ли схема управления положением эффективно работать. Модуль 40 передачи и определения неисправности будет проводить передачу управления на основе своего анализа сигнала обратной связи, соответствующего схеме управления положением (т.е. сигнала, генерируемого датчиком 18 положения); ведущего сигнала, генерируемого схемой управления положением (который, в свою очередь, основан на сигнале обратной связи), или любой другой информации или данных, отражающих работу схемы управления положением в ответ на сигнал обратной связи. Например, модуль 40 передачи и определения неисправности может быть выполнен с возможностью определения того, что датчик 18 положения отключился или выдает сигнал с параметрами вне спецификации из-за сломавшегося соединения.
Переключатель 42 выбора управления не обязательно должен быть физическим переключателем, таким как реле, но вместо этого, может быть реализован в виде программного обеспечения или встроенной программы ("прошивки") в контроллере 10. В результате, сигнал управления может принимать различные формы (т.е. может быть цифровым, аналоговым и т.д.) в соответствии с типом переключателя. В любом случае, переключатель 42 выбора управления выбирает один из ведущих сигналов, генерируемых схемами управления с обратной связью, в данном случае из ведущих сигналов, генерируемых модулем 14 сервоуправления положением и модулем 16 сервоуправления давлением. Ведущий сигнал, выбранный переключателем 42 выбора управления, затем доставляется как цифровой, аналоговый или другой электронный сигнал управления к устройству 30 управления воздухом.
В соответствии с вариантом, показанным на фиг.1, линия 44 соединяет модуль 14 сервоуправления положением с модулем 16 сервоуправления давлением. Линия 44 представляет собой канал связи между двумя схемами управления с обратной связью и, как таковая, может отображать прохождение данных от одной выполняемой программы управления с обратной связью к другой. Линия 44, таким образом, может быть выполнена в программном обеспечении или во встроенной программе и не обязательно представляет собой физическую проводку в контроллере. Как будет объяснено далее, такая связь между несколькими схемами управления обеспечивает плавные передачи управления. Более конкретно, первоначальная реализация целевой схемы управления с обратной связью может основываться на ведущем сигнале, сигнале обратной связи или других данных, генерируемых посредством или в связи с предыдущей или первоначальной схемой управления для выполнения плавной передачи управления с обратной связью от одной схемы к другой. Необходимость в такой передаче управления не обязательно вытекает из неисправности или неполадки, как обсуждалось выше в связи с модулем 40 передачи и определения неисправности. Например, такая передача управления может происходить по решению оператора, но желательность обеспечения плавной передачи управления остается. Такая передача управления на усмотрение оператора может иметь место в связи с передачей управления с обратной связью от вторичной схемы управления обратно к первичной схеме управления, как только проблема, связанная с неисправностью или неполадкой, была устранена. Решение передать управление обратно к первичной схеме управления, или в более общем смысле, любая другая передача управления с обратной связью, может быть дано или направлено пользователем или оператором, как показано на фиг.1, по линии 46 пользовательского выбора, подающей входной сигнал в контроллер 10. Линия 46 пользовательского выбора и входной сигнал, проходящий по ней, могут быть выполнены посредством пользовательского интерфейса, предоставляющего возможность выбора параметров, как хорошо известно специалистам в этой области.
Линии 48 и 50 представляют собой каналы связи между модулем 40 передачи и определения неисправности и модулями 14 и 16 сервоуправления положением и давлением, соответственно. Такая связь может включать доставку команды начать выполнение программы управления с обратной связью. Такая связь может также быть двусторонней для поддержки выполнения плавных передач управления с обратной связью. Таким образом, связь между двумя схемами управления необязательно должна быть прямой по линии 44, но альтернативно может быть выполнена в обход по линиям 48 и 50 и через модуль 40 передачи и определения неисправности.
Фиг.2 демонстрирует программу управления с обратной связью, выполняемую контроллером 10 (фиг.1) в соответствии с одним из вариантов настоящего изобретения. Программа управления с обратной связью может образовывать часть встроенного кода, хранящегося в одном или более элементах памяти контроллера 10 для выполнения микропроцессором этого контроллера. Такой встроенный код и шаги программы управления с обратной связью, реализуемые контроллером, могут соответствовать одному или более модулю 14 (фиг.1) сервоуправления положением, модулю 16 (фиг.1) сервоуправления давлением и модулю 40 (фиг.1) передачи и определения неисправности. Работа контроллера 10 и, таким образом, выполнение программы, приведенной на фиг.2, может быть автономной или, в качестве альтернативы или дополнительно, начинаться и прекращаться оператором. В любом случае, будучи запущенной, программа формирует рабочий цикл, обеспечивающий автономное управление узлом клапан/привод. Рабочий цикл также предусматривает пользовательское управление, включающее право перезапускать или прекращать исполнение данной программы в любое время.
Программа может начинаться с идентификации или выбора первичной и вторичной схемы управления с обратной связью в блоке 60. Например, переключатель 42 выбора управления (фиг.1) может быть установлен в это время таким образом, что сигнал управления, генерируемый контроллером 10, определяется в первую очередь ведущим сигналом, генерируемым модулем 14 сервоуправления положением (фиг.1). В ином варианте, переключатель 42 выбора управления уже установлен, и первичная и вторичная схемы управления с обратной связью предварительно определены или установлены, исходя из свойств клапана 12 и его соответствующих компонентов. Вообще говоря, установление схемы управления будет определяться наличием соответствующего датчика, так что в примерном варианте на фиг.1 первичная схема управления является схемой управления положением, а вторичная схема управления является схемой управления давлением. После того, как будет выбрана первичная схема управления, контроллер 10 может выполнить программу инициализации в блоке 62, которая может включать сброс компонентов (например, ПИД-контроллера модуля 14 сервоуправления положением) контроллера 10 и подтверждение того, что датчик (например, датчик 26 положения), соответствующий первичной схеме управления, включен и работает. Следует заметить, что контроллер 10 в этот момент может инициализировать и начинать выполнение (в фоне) программ управления с обратной связью дополнительно к первичной программе управления с обратной связью. Программа инициализации может также включать процедуры калибровки для одного или более датчиков и/или узла клапан/привод. Например, процедура автоматической калибровки может использовать существующие данные калибровки датчика положения для определения «стендовой установки» узла клапан/привод. Эта процедура обеспечивает диапазон давлений, требуемый для полного открытия и закрытия клапана 12. Этот диапазон давлений, в свою очередь, может устанавливать или задавать диапазон управления давлением для давления, прикладываемого к приводу 22, отображающий 0-100%% требуемое положение клапана на соответствующее прикладываемое давление.
После того, как контроллер 10 выполнит программу инициализации, в блоке 64 выполняется текущая схема управления с обратной связью. В примерном варианте, показанном на фиг.1, модуль 14 сервоуправления положением получает текущую уставку и другие входные данные, такие, например, как информация обратной связи, от датчика 18 положения, и затем обрабатывает данные для генерации ведущего сигнала. То, каким образом генерируется ведущий сигнал, будет объяснено далее, но вообще говоря, ведущий сигнал можно генерировать в блоке 64, используя стандартные технологии ПИД-контроллера и алгоритмы управления.
Также осуществляется этап определения ошибки управления с обратной связью. В примерном варианте на фиг.1, этап определения ошибки может выполняться модулем 40 передачи и определения неисправности. Как показано, например, в программе с фиг.2, управление переходит к блоку 66 принятия решения, который определяет, случилась ли неисправность датчика или иная ошибка управления с обратной связью. К неисправности датчика может относиться информация обратной связи, отражающая то, что датчик отключился. В ином варианте информация обратной связи может отражать положение, невозможное для клапана. Другим путем, которым информация обратной связи может указывать на отключенный или имеющий неполадку датчик, является доставка данных, выходящих за пределы спецификации датчика. Могут быть использованы и другие способы определения неисправности или неполадки датчика или другого оборудования, хорошо известные специалистам в этой отрасли сейчас или в будущем.
Выполнение этапа определения ошибки в блоке 66 показано, как следующее за генерацией ведущего сигнала в блоке 64, так что ведущий сигнал (или другие сигналы или данные, генерируемые из сигнала обратной связи) может быть также проанализирован как часть проверки на ошибку. В качестве альтернативы, блок 66 может выполняться до генерации ведущего сигнала или одновременно с ней. В таких случаях, этап определения ошибки может быть главным образом нацелен на анализ того, произошла ли ошибка датчика. В примерном варианте блок 64 может также включать оценку информации обратной связи по мере ее обработки. Например, модуль 14 сервоуправления положением (фиг.1) может регулярно производить проверки, чтобы определить, не работает ли датчик 18 положения (и другие датчики) за пределами спецификации или иным образом неисправен. В некоторых вариантах контроллер 10 может непрерывно вести такую оценку датчика 18 положения (и других датчиков). Соответственно, следует заметить, что блок 66 может быть выполнен в соединении с другими блоками программы и/или в другие моменты программы, так что исполнение предлагаемого здесь способа не ограничено точной последовательностью этапов, изображенных на фиг.2. Для специалистов в этой области будут очевидны иные модификации для обеспечения возможности альтернативных (или дополнительных) этапов определения неисправности.
Вообще говоря, если ошибка управления с обратной связью не обнаружена, то ведущий сигнал, генерируемый текущей схемой управления с обратной связью (например, модулем 14 сервоуправления положением), выдается в блоке 68 как сигнал управления для управления узлом клапан/привод. Далее, два блока 70 и 72 принятия решения проверяют состояние контроллера 10 перед тем, как дать разрешение на исполнение следующего цикла программы сервоуправления. В примерном варианте осуществления фиг.2 первая проверка состояния определяет в блоке 70, выбрал ли оператор новую схему управления с обратной связью, тогда как вторая проверка состояния определяет в блоке 72, выполняется ли в настоящий момент первичная схема управления с обратной связью. Эти и другие проверки состояния могут выполняться в любой точке программы, непрерывным или дискретным образом, и показаны на фиг.2 в данной точке программы только для упрощения демонстрации. Как показано в примерном варианте на фиг.2, управление будет переходить обратно в блок 64 для следующего цикла программы сервоуправления сервоприводом, до тех пор, пока оператор не решит переключить управление от первичной схемы управления (например, управления положением) к вторичной (например, управлению давлением).
Остальные части программы, изображенной на фиг.2, предназначены для ряда различных обстоятельств, в которых управление с обратной связью может передаваться от одной схемы управления с обратной связью к другой схеме управления с обратной связью. При одних условиях передача управления с обратной связью может происходить в связи с неисправностью датчика или другой ошибкой, связанной с данной схемой управления с обратной связью. Например, блок 66 может определить ошибку или неисправность и, как результат, передать управление блоку 74, который, в свою очередь, посылает оператору предупреждение, тревожный сигнал или иное сообщение, информирующее о том, что произошла ошибка или неисправность. Далее, блок 76 определяет, выбрал ли оператор новую схему управления с обратной связью в ответ на предупреждение, тревожный сигнал или иное сообщение, относящееся к неисправности или ошибке. Таким образом, переход ко вторичной схеме управления с обратной связью происходит во время работы контроллера 10 (и, в более общем случае, клапана 12) в блоке 78 и основан на информации обратной связи, соответствующей первичной схеме управления с обратной связью или предоставляемой в связи с ней. В этом случае информация обратной связи отражает проблему или ошибку, связанную с первичной схемой управления с обратной связью. Несмотря на проблему, передача управления позволяет клапану 12 оставаться в рабочем состоянии. В более общем случае и, как показано, например, в связи с блоком 70, блок 78 выполняется с другими передачами схем управления, инициируемыми оператором.
Передача схемы управления в соответствии с предлагаемыми контроллером и способом также включает автономные действия, исполняемые контроллером 10. Например, в блоке 80 может произойти автономная передача, в том случае, когда оператор не отвечает на предупреждение или тревожный сигнал, генерируемые в блоке 74, или если данное воплощение контроллера 10 не имеет функции предупреждения или тревожного сигнала. Таким образом, в определенных вариантах контроллер 10 может быть установлен или выполнен с возможностью автоматического возврата к вторичной схеме управления в случае неисправности, ошибки или проблемы, связанной с первичной схемой управления. В любом случае, процедура передачи, выполняемая в блоке 80, передает управление с обратной связью к вторичной схеме управления, если анализ и/или обработка информации обратной связи, соответствующей первичной схеме управления, имеет результатом определение неисправности, ошибки или проблемы.
Другой пример автономной передачи предполагает обстоятельства, в которых контроллер 10 имеет возможность переключиться от вторичной схемы управления обратно к первичной схеме управления. Такие обстоятельства могут сложиться, например, после устранения проблемы, связанной с датчиком 18 положения (например, ремонта соединения между датчиком 18 положения и узлом клапан/привод). В частности, со ссылкой на примерный вариант воплощения на фиг.2, ранее управление с обратной связью было переключено ко вторичной схеме управления (т.е. управлению давлением), как результат выполнения одного из блоков 78 и 80 после неисправности или проблемы, возникшей в отношении первичной схемы управления. Затем выполнялись одна или более итераций цикла, включающего блоки 64, 66, 68, 70 и 72, так что клапан 12 управлялся модулем 16 сервоуправления давлением (фиг.1). Во время каждого исполнения цикла, блок 72 определяет, что контроллер 10 не находится в первичной схеме управления, и управление передается блоку 82, который выясняет, была ли проблема, из-за которой произошла первоначальная передача управления, устранена или решена. Если проблема была устранена, управление передается в блок 84, осуществляющий передачу обратно к первичной схеме управления. В случае, если проблема не была устранена, производится еще одно выполнение программы сервоуправления блока 64 в соответствии с вторичной схемой управления. В альтернативном варианте, последовательность блоков 82 и 84 может включать в себя опцию корректировки оператором или другие функциональные средства для ограничения возможности контроллера 10 автономно осуществлять передачу управления в таких условиях. Таким образом, предлагаемые контроллер и способ могут включать программу, которая позволяет оператору определить, произойдет ли, и в какое время, переход обратно к первичной схеме управления после того, как проблема с первичной схемой управления была решена.
Теперь обратимся к фиг.3, на которой изображен вариант осуществления предлагаемых контроллера и способа, поддерживающий переход между схемами управления с обратной связью в более общем понимании (т.е. не просто в связи с неисправностью или неполадкой), включая, например, переход от вторичной схемы управления обратно к первичной схеме управления. Более конкретно, данный вариант осуществления позволяет обеспечить плавный переход между схемами управления с обратной связью с помощью использования сигнала управления (или ведущего сигнала), подаваемого к узлу клапан/привод во время передачи, который, в свою очередь, основан на информации обратной связи, использованной для получения этого сигнала управления (или ведущего сигнала). В данном варианте на фиг.3, модуль 14 сервоуправления положением и модуль 16 сервоуправления давлением с фиг.1 показаны более детально, включая компоненты и возможности плавной передачи управления другому модулю.
Каждый из модулей 14 и 16 сервоуправления положением и давлением в варианте на фиг.3 включает набор компонентов, направленный на реализацию ПИД-контроллера, или управления с обратной связью пропорционального, дифференциального и интегрального типов на основе соответствующего сигнала обратной связи и уставки. Сигналы обратной связи для модулей 14 и 16 сервоуправления положением и давлением поступают по линиям 100 и 102, соответственно, чтобы сделать возможным сравнение с уставкой посредством сумматора 104. Сумматор 104 и другие компоненты, общие для данного варианта осуществления двух модулей 14 и 16 сервоуправления, будут обозначены одинаковыми ссылочными обозначениями лишь для простоты описания и в понимании того, что использование предлагаемых контроллера и способа не ограничено вариантом осуществления, в котором такие компоненты используются совместно двумя модулями 14 и 16 сервоуправления. Например, выполнение двух раздельных программ управления, включающее два отдельных сумматора 104 (или суммирующие процедуры), может происходить непрерывно и одновременно в соответствии с одним из вариантов. Непрерывное исполнение части или целиком одной или более программ ради таких фоновых вычислительных операций может выгодно предоставлять значения для немедленного использования, таким образом устраняя необходимость какого-либо переходного периода и избегая возможности неожиданных потерь информации обратной связи для выполнения перехода. Как было здесь выяснено, такие непрерывные вычислительные операции не обязательно включают все вычисления в схеме управления, но, скорее, могут включать в себя только те вычисления, которые необходимы во время передачи управления (например, вычисление интегральной поправки). Альтернативно, другие варианты могут выполнять только единственную программу между передачами управления ради экономии энергии, при этом единственная программа имеет возможность регулировок для реализации схемы управления с обратной связью (т.е. управления положением, управления давлением и т.д.), исполняемой в текущий момент.
Результат сравнения, т.е. сигнал ошибки, направляется как в пропорциональный контроллер, обозначенный в целом 106, так и в интегральный контроллер, обозначенный в целом 108. Как известно специалистам в этой области, каждый пропорциональный контроллер 106 включает усилитель 110, имеющий коэффициент усиления, установленный или настраиваемый соответствующим образом, для генерации сигнала, пропорционального сигналу ошибки. Коэффициент усиления каждого соответствующего модуля сервоуправления может отличаться по причине различной природы сигнала обратной связи и других аспектов схемы управления с обратной связью. Каждый интегральный контроллер 108 включает усилитель 112, имеющий соответствующий коэффициент усиления, который подготавливает сигнал ошибки для накапливающего сумматора, обозначенного в целом 114, интефирующего ошибку по времени. Каждый накапливающий сумматор 114, в свою очередь, включает сумматор 116 и элемент 118 задержки, который сохраняет предыдущее значение интегрирования и подает его обратно в сумматор 116. Сигналы, генерируемые пропорциональным и интегральным контроллерами 106 и 108, направляются вместе с сигналом, генерируемым дифференциальным контроллером, обозначенным в целом 120, в сумматор 122 для получения соответствующего ведущего сигнала для модуля сервоуправления. Каждый дифференциальный контроллер 120 включает элемент 124 взятия производной, который генерирует отображение производной по времени сигнала обратной связи, и усилитель 126, имеющий соответствующе установленный или настроенный коэффициент усиления, как известно специалистам в этой области.
В соответствии с примерным вариантом описываемых контроллера и способа на фиг.3, каждый интегральный контроллер 108 также включает переключатель 126, который позволяет сбрасывать интегральное значение. Переключатель 126 может управляться сигналом, который генерируется в качестве результата решения передать управление с обратной связью. Переключатель 126 не обязательно должен быть переключателем в физическом или электронном смысле, а может вместо этого обеспечивать доступ или возможность модифицировать сигнал или значение, генерируемое накапливающим сумматором 114. На фиг.3 такой доступ показан посредством переключателя 126, расположенного вниз по схеме от элемента 118 задержки. Альтернативно, переключатель 126 может иметь доступ к накапливающему сумматору выше по схеме от элемента 118 задержки, или любым другим образом, который предусматривает возможность модификации содержания накапливающего сумматора 114. Модификация интегрального значения в накапливающем сумматоре 114 предполагает сброс при помощи модуля 128 сброса, отвечающего за данные из обоих модулей сервоуправления (т.е. модулей сервоуправления, соответствующих исходной и целевой схеме управления). Более конкретно, модуль 128 сброса вычисляет новое значение для интегрального контроллера 108 или для накапливающего сумматора 114 на основе сигнала управления, подаваемого в этот момент времени на узел клапан/привод. Сигнал управления, в свою очередь, получают из ведущего сигнала, генерируемого модулем сервоуправления сервоприводом, выполняемым при управлении с обратной связью. Таким образом, модуль 128 сброса одного из модулей сервоуправления (например, модуля 16 сервуправления давлением) выполняет вычисление на основе ведущего сигнала текущего модуля сервоуправления (т.е. модуля 14 сервоуправления положением), который, в свою очередь, основан на информации обратной связи от соответствующего датчика, соответствующего текущему модулю сервоуправления.
Как показано на фиг.3, каждый модуль 128 сброса также реагирует на выходные сигналы пропорционального и дифференциального контроллеров модуля сервоуправления, в котором он установлен (т.е. целевого модуля сервоуправления, к которому в данный момент времени происходит передача управления, и, например, сигналы Рр и Dp для модуля 16 сервоуправления давлением). Таким образом, каждый модуль 128 сброса может выполнять операцию суммирования, в которой сумма выходных сигналов пропорционального и дифференциального контроллеров данного модуля сервоуправления сервоприводом вычитается из сигнала управления или ведущего сигнала от другого модуля сервоуправления (или наоборот). Полученная в результате разница составляет значение сброса, выдаваемое модулем 128 сброса для регулировки интегрального уровня в интегральном контроллере 108.
Как результат вышеупомянутой операции сброса, ведущий сигнал, генерируемый целевым модулем сервоуправления, регулируется таким образом, чтобы равняться или приближенно равняться ведущему сигналу, генерируемому модулем сервоуправления, от которого передается управление. В любом случае, обеспечивается возможность плавной передачи управления. В ином случае клапану 12 может быть задано резкое, прерывистое движение в момент передачи управления. То есть, без предшествующей регулировки ведущий сигнал целевого модуля сервоуправления сервоприводом может оказаться не равным ведущему сигналу модуля сервоуправления, от которого передается управление. Такое неравенство может быть большим и непредсказуемым, в основе чего лежат ошибки функционирования, присущие соответствующим датчикам, значения коэффициентов усиления, установленные для каждого из соответствующих контроллеров, или любые другие операционные характеристики задействованных схем управления с обратной связью.
Использование предлагаемых контроллера и способа не ограничивается конструкцией компонентов контроллера, показанной на фиг.3. Иными словами, выход интегрального контроллера 108 может быть модифицирован различными способами для регулировки ведущего сигнала целевого модуля сервоуправления. В одном из вариантов осуществления (не показан на фиг.3) модуль 128 сброса работает непосредственно с выходом интегрального контроллера 108 ниже по схеме от сумматора 116. Таким образом, первый ведущий сигнал, генерируемый целевым модулем сервоуправления, может быть установлен точно равным последнему ведущему сигналу другого модуля сервоуправления. Альтернативно, как показано на фиг.3, модуль 128 сброса регулирует сигнал, подаваемый от элемента 118 задержки в сумматор 116. В этом случае сигнал ошибки, подаваемый в усилитель 112, может модифицировать выход интегрального контроллера после того, как модуль 128 сброса 128 модифицировал интегральное значение, так что первый ведущий сигнал, генерируемый целевым модулем сервоуправления, станет близок по величине, хотя и не обязательно в точности равен последнему ведущему сигналу другого модуля сервоуправления. В любом случае, результатом для клапана 12 или узла клапан/привод является плавный переход между схемами управления с обратной связью или, иными словами, передача без удара.
Передача без удара с использованием, например, модуля 128 сброса накапливающего сумматора с фиг.3 может быть осуществлена в сочетании с выбранной оператором, или инициированной оператором, передачей управления с обратной связью. Один из примеров выбранной оператором передачи приведен в связи с блоком 78 на фиг.2. Однако шаги, исполняемые в блоке 78, могут отличаться в зависимости от обстоятельств, при которых управление было передано блоку 78. В частности, на фиг.4 показаны шаги, исполняемые в соответствии с одним из вариантов предлагаемых контроллера и способа, когда оператор инициировал передачу управления без каких-либо ошибок или тревожных сигналов. В этом случае блок 70 передал управление блоку 78 (как показано на фиг.2), и шаги, предпринятые для исполнения передачи, могут в общем случае совпадать с перечисленными в описании, приведенном выше в связи с фиг.3. С другой стороны, фиг.5 показывает шаги, предпринятые в соответствии с еще одним вариантом предлагаемых контроллера и способа, когда оператор выбрал передачу управления с обратной связью в ответ на тревожный сигнал или другую индикацию ошибки или неисправности управления с обратной связью.
Теперь вернемся к фиг.4, на которой показана программа передачи без удара для схемы управления, включающей ПИД-контроллер. Программа на фиг.4 может использоваться при всех обстоятельствах передачи, но особенно хорошо подходит для реализации при отсутствии ошибок управления обратной связи, неисправностей и других проблем. То есть, в программе на фиг.4 предполагается, что первоначальная схема управления с обратной связью (т.е. схема управления, от которой будет передаваться управление) работает нормально, и соответствующая ей самая последняя информация обратной связи является достаточно точной, чтобы отражать работу управляемого устройства. Программа может затем основываться на этой информации обратной связи для выполнения вычислений перехода, как описано выше для фиг.3. С этой целью программа передачи без удара начинается с передачи управления в блок 140, который получает информацию обратной связи для целевой схемы управления с обратной связью. Начальные значения контроллеров, такие как значения пропорционального и дифференциального контроллеров (Pi и Di), затем определяются для целевой схемы управления с обратной связью в блоке 142 на основе вычислений, учитывающих сигнал ошибки, генерируемый из информации обратной связи и уставки. Другие первоначальные вычисления управления с обратной связью, соответствующие целевой схеме сервоуправления, такие как вычисления для интегрального контроллера, могут также происходить в этот момент, но любые вычисления, которые могут быть сброшены в соответствии с предлагаемыми контроллером и способом, могут быть задержаны до окончания операции сброса. Операция сброса выполняется следом в блоке 144, где, вообще говоря, вычисленное или сохраненное значение целевой схемы сервоуправления инициализируется или сбрасывается на основе информации обратной связи первоначальной схемы сервоуправления. На основе этой информации обратной связи определяется переходное значение ведущего сигнала от первоначальной схемы сервоуправления либо в более ранний момент выполнения (например, в блоке 64 на фиг.2), либо как часть исполнения блока 144. Блок 144 затем выполняет вычисления для инициализации целевой схемы сервоуправления с учетом переходного значения ведущего сигнала. Например, интегральное значение (li) интегрального контроллера 108 целевой схемы сервоуправления, показанной в примерном варианте на фиг.3, может быть отрегулировано на основе сравнения переходного значения ведущего сигнала и начальных значений контроллера, вычисленных в блоке 142.
При дальнейшем рассмотрении фиг.4, целевая схема сервоуправления сервоприводом теперь готова принять управление с обратной связью, и передача управления происходит в блоке 146, ведущий сигнал целевой схемы управления определяется начальными значениями контроллера (например, Pi, Di) и любыми первоначально отрегулированными значениями контроллера (например, li). Ведущий сигнал затем поступает в блок 148 для генерации сигнала управления узла клапан/привод. В примерном варианте фиг.2 управление может затем перейти в блок 64 для следующей итерации программы управления с обратной связью, соответствующей целевой схеме управления с обратной связью, которую теперь можно рассматривать в качестве текущей схемы управления с обратной связью.
Программа передачи без удара, показанная на фиг.4, может также выполняться при передачах, которые инициированы не оператором. Например, блок 84 на фиг.2 предлагает обстоятельства, в которых управление передается обратно к первичной схеме управления от вторичной схемы управления после того, как проблема была решена, позволяя тем самым первичной схеме управления функционировать должным образом. Блок 84, а значит и программа передачи без удара на фиг.4, может выполняться автономно после выяснения того, что проблема была решена. Альтернативно, оператор определяет, была ли решена проблема первичной схемы управления в связи с блоком 82, выборочно определяя, таким образом, будет ли и когда именно осуществляться передача управления в блоке 84.
Фиг.5 показывает шаги, связанные с передачей управления с обратной связью, когда проблема, ошибка или неисправность были определены в отношении текущей схемы управления с обратной связью. См., например, блоки 78 и 80 передачи управления (фиг.2), связанные с управлением с обратной связью или неисправностью датчика. При таких обстоятельствах, вообще говоря, не известно, можно ли доверять тому, что информация обратной связи или другие данные, относящиеся к текущей схеме управления с обратной связью, правильно отражают работу узла клапан/привод. В результате, передача без удара в соответствии с программой, показанной на фиг.4, может быть нежелательной. Вместо этого, в варианте, показанном на фиг.5, такие "слепые" передачи исключаются. С этой целью блок 150 определяет, доступна ли и/или задействована ли передача без удара. Выбираемая пользователем опция может, например, отключить передачу без удара в случае тревожного сигнала о неисправности датчика или неполадке. Если безударный переход не включен или недоступен по другим причинам, управление переходит к блоку 152, который исполняет передачу управления с обратной связью к другой схеме управления без регулировки каких-либо значений контроллера на основе информации обратной связи, относящейся к теперь уже не функционирующей схеме управления.
Остаток программы, показанной на фиг.5, обращен к той ситуации, когда оператор включил передачу без удара в случае аварийной ситуации, или если передача без удара является доступной в общем случае независимо от того, существует ли аварийная ситуация. Вообще говоря, примерный вариант осуществления на фиг.5 выполняет передачу без удара на основании наилучших имеющихся данных. Для этого блок 154 обращается к записанной информации обратной связи, хранящейся, например, в памяти модуля 40 передачи и определения неисправности (фиг.1), чтобы получить последнюю информацию обратной связи, неповрежденную и достоверную. Как часть этого определения, предлагаемые контроллер и способ могут включать анализ записи информации обратной связи, к которой предоставляется доступ, когда информация обратной связи становится недостоверной или ошибочной. В качестве альтернативы, контроллер и способ могут обращаться к данным, относящимся к информации обратной связи из определенного прошлого момента времени, либо определенного предварительно, либо выбранного оператором. Далее, ведущий сигнал для текущей схемы управления с обратной связью вычисляется (или пересчитывается) в блоке 156 при наличии вызванной из памяти информации обратной связи. Имея в своем распоряжении вычисленный ведущий сигнал, в блоке 158 осуществляется процедура передачи без удара и может, например, следовать этапам программы, описанной в связи с фиг.4.
Использование предлагаемых контроллера и способа не ограничивается применением в сочетании с конкретными типами механизмов обратной связи, такими как управление положением или управление давлением. Предлагаемые контроллер и способ могут быть реализованы с любым из всего разнообразия датчиков, известных специалистам в этой области в настоящее время или в будущем. С одной стороны, при выборе типа датчика можно руководствоваться тем, что является наиболее соответствующим конкретному устройству управления процессом, подлежащему управлению. Существует совместимость описываемых контроллера и способа с любым датчиком, способным обеспечить информацию обратной связи или иную информацию, отражающую работу устройства управления процессом, подлежащего управлению, и не зависит от того, каким образом информация отражает работу устройства управления процессом. Такая широкая совместимость предлагаемых контроллера и способа поддерживает их реализацию в разнообразных вариантах процессов и вариантах управления процессом.
Хотя вышеописанные воплощения описаны применительно к контроллеру и способу, относящимся к двум различным схемам управления, использование или исполнение предлагаемых контроллера и способа не ограничено вариантом с двумя схемами, а также не ограничено случаем, в котором на датчиках давления и положения основываются, как на исключительных средствах для управления с обратной связью. Подобным образом, контроллер не обязательно должен быть цифровым контроллером клапана, как и способ не ограничен функционированием в соединении с клапаном или другим управляемым пневматически устройством управления процессом. Скорее, использование предлагаемых контроллера и способа полезно в любом количестве вариантов управления процессом, в соединении с любым устройством управления процессом, в сочетании с различными схемами управления с обратной связью, отличающимися от управления пропорционально-дифференциально-интегрального типа. Следует заметить, что модули сервоуправления, соответствующие схемам управления, не обязательно должны быть идентичными, а вместо этого могут быть оптимизированы, чтобы подходить схеме управления.
Память модуля 40 передачи и определения неисправности может являться частью устройства хранения данных, которое обеспечивает функцию памяти, для любого количества вышеупомянутых программ, выполняемых контроллером 10, или для любого количества вышеупомянутых компонентов контроллера 10. Память может быть интегрирована вместе с другими компонентами контроллера 10 или отделена от них, и может быть реализована любым устройством, доступным и хорошо известным специалистам в этой сфере.
Хотя компоненты и аспекты предлагаемых контроллера и способа описаны здесь и показаны на фигурах как отдельные модули или блоки, каждый из компонентов или аспектов может быть выполнен или реализован посредством любой комбинации оборудования, программного обеспечения и встроенных программ либо отдельно, либо в комбинации с одним или более иным компонентом, модулем или другим аспектом предлагаемых контроллера и способа. Каждая из программ, описанных здесь, может быть реализована посредством инструкций, предназначенных для выполнения компьютером общего назначения, микропроцессором или другим компьютерным процессором, и может сохраняться на любом носителе, читаемом в компьютере (таком, как память в соединении с процессором), либо отдельно, либо в комбинации с одной или более другими программами, и либо отдельно, либо в комбинации с любым другим оборудованием или встроенными программами, задействованными при реализации указанных программ управления и способа.
В более общем смысле, варианты осуществления предлагаемых контроллера и способа могут быть реализованы в любой комбинации оборудования, программного обеспечения или встроенных программ. Некоторые варианты могут быть реализованы как компьютерные программы, выполняемые на программируемых системах, содержащих по меньшей мере один процессор или обрабатывающую систему, систему хранения данных (включая энергозависимую и энергонезависимую память и/или элементы запоминающего устройства), по меньшей мере одно устройство ввода и по меньшей мере одно устройство вывода. Программный код может применяться к входным данным с целью выполнения описанных здесь функций и генерации выходной информации. Выходная информация может подаваться в одно или более выходное устройство известным способом. Обрабатывающая система может включать в себя любую систему, имеющую процессор, например, процессор цифровой обработки сигналов (digital signal processor, DSP), микроконтроллер, специализированная интегральная микросхема (application specific integrated circuit, ASIC) или микропроцессор.
Для связи с обрабатывающей системой программы могут быть написаны на процедурном или объектно-ориентированном языке программирования высокого уровня. Если требуется, программы также могут быть написаны на ассемблере или машинном языке. В действительности, использование предлагаемых системы и способа не ограничено каким-либо конкретным языком программирования. В любом случае, язык может быть либо компилируемым, либо интерпретируемым.
Программы могут храниться на носителях или устройствах хранения (например, гибких дисках, ПЗУ, компакт-дисках, устройствах с флэшпамятью. дисках DVD и других устройствах хранения), читаемых общей или специальной программируемой обрабатывающей системой, с целью конфигурации и работы обрабатывающей системы, когда носитель или устройство хранения читается обрабатывающей системой для исполнения программы или шагов, описанных здесь. Могут также рассматриваться варианты осуществления предлагаемых контроллера и способа, реализуемые как машинно-читаемый носитель, выполненный с возможностью использования с обрабатывающей системой, при этом выполненный таким образом носитель приводит к тому, что обрабатывающая система работает определенным и заранее установленным образом для выполнения описанных здесь функций.
Предыдущее описание дано исключительно для ясности понимания и не накладывает никаких ненужных ограничений, так как для специалистов в данной области модификации в пределах изобретения могут быть очевидны.
Изобретение относится к области автоматики, в частности к управлению процессом, имеющим несколько механизмов управления с обратной связью. Контроллер включает первый и второй модули сервоуправления, которые генерируют первый и второй ведущие сигналы на основе информации обратной связи от первого и второго датчиков для управления устройством управления процессом в соответствии с первым и вторым режимами управления, соответственно. Контроллер также включает модуль передачи управления с обратной связью, который передает управление работой устройства управления процессом из первого режима управления во второй режим управления на основе информации обратной связи от первого датчика. В некоторых вариантах, такая передача управления предполагает программу управления, которая первоначально генерирует второй ведущий сигнал на основе первого ведущего сигнала с целью обеспечения плавной, без ударов, передачи управления между режимами управления. Технический результат - повышение надежности работы системы управления. 3 н. и 28 з.п. ф-лы, 5 ил.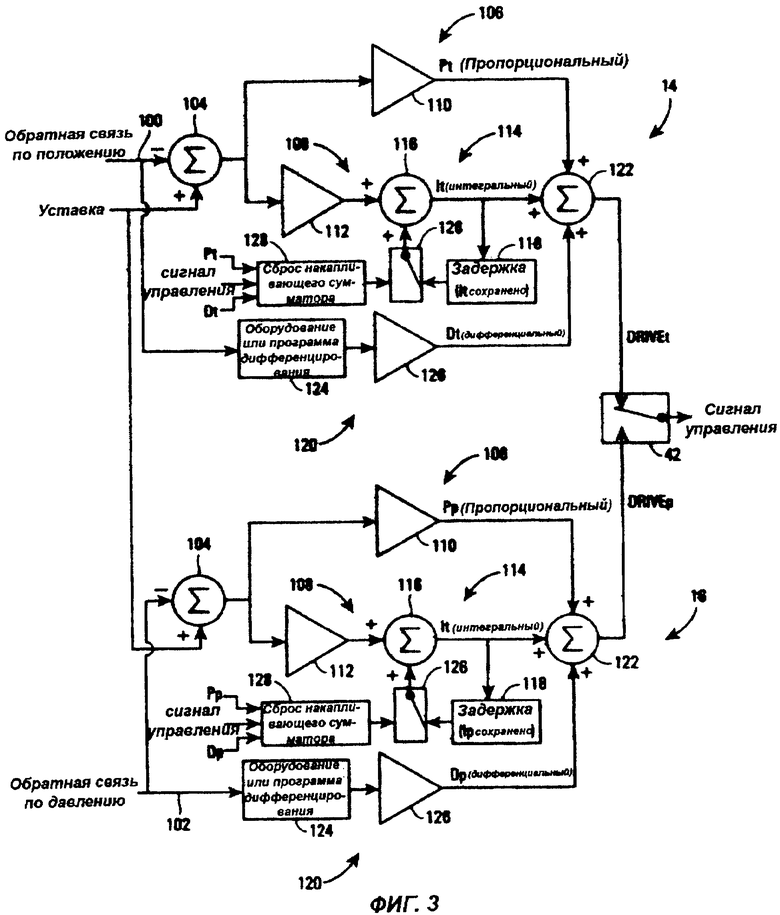
| Устройство для сборки деталей | 1982 |
|
SU1049229A2 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| RU 2058495 C1, 20.04.1996 | |||
| Электрогидравлический привод подачи деревообрабатывающего станка | 1984 |
|
SU1166991A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| US 4236202 A, 25.11.1980. | |||

