о
Од
со со
Изобретение относится к деревооб. рабатывающей промышленности и может быть использовано в станках для распиловки древесины.
Известен электрогидравлический привод подачи деревообрабатывающего станка, содержащий гидродвигатель подачи, датчик нагрузки двигателя рабочего органа, который подключен на вход блока управления, выход ко- торого в свою очередь соединен с исполнительным механизмом 1 J. , Однако известное устройство характеризуется невысокой надежностью работы станка вследствие низких динамических качеств привода подачи.
Известен также электрогидравлический привод подачи деревообрабатывающего станка, включающий насос, гидродвигатель подачи, подключенный к входу блока управления, датчик нагрузки двигателя рабочего органа и соединенный с выходом блока управления элемент для регулирования потока рабочей жидкости через гвдродви гатель подачи 2 . ) Недостатками данного устройства являются перегрузки двигателя рабочего органа при врезании пипы в древесину, повышенная энергоемкость, а также перерегулирование в момент врезания пилы в древесину, что приводит к снижению надежности работы станка.
Цель изобретения - повьшение надежности работы станка путем з еньшения перегрузок двигателя рабочего органа, повьшение качества регулирования, а также снижение энергоемкости станка.
Цель достигается тем, что электрогидравлический привод подачи деревообрабатывающего станка, включающий насос, гидродвигатель подачи, подключенный к входу блока управления, дат чик нагрузки двигателя рабочего органа и соединенньй с выходом блока управления элемент для регулирования потока рабочей жидкости через гидродвигатель подачи, снабжен датчиком оборотов гидродвигателя подачи, преобразователем датчика нагрузки и вьтолненным в виде реле коммутатором датчиков, через контакты котрого последние подключены к блоку управления, а обмотка реле соединена с выходом преобразователя датчика нагрузки.
На фиг. 1 изображена принципиальная электрогидравлическая схема привода; на фиг. 2 - функциональная схема; на фиг. 3 - графики переходных процессов.
В схеме (фиг. 1) двигатель 1 рабочего органа передает движение рабочему органу (пильному механизму) 2 Подающие вальцы 3 приводятся во вращение через редуктор А от гидродвигателя 5 подачи. На оси гидродвигателя крепится датчик 6 его оборотов (тахогенератор), который вьфабатывает ЭДС обратной связи при работе на холостом ходу (х..х.). Гидронасос создает давление рабочей жидкости в гидросистеме, которое регулируется редукционным клапаном 8. Электрическим следящим золотником 9 регулируется подача рабочей жидкости гидромотору. Золотником управляет электромагнит с обмотками w1 и w2 и усилитель, построенньй на транзисторах VT1 и VT2.
Усилитель и задатчик нагрузки (cos V), выполненный на потенциометре R1, получают питание от источника 10 питания. Переключателем 11 осуществляется выбор направления вращения подающих вальцов.
Вторым каналом обратной связи является датчик нагрузки рабочего органа (тока) 12 с преобразователем 13, от которого запитана катушка реле 14 для коммутации датчиков и потенциометр настройку R9 обратной связи (работы под нагрузкой).
Настройка системы на х.х. производится потенциометром R8, установленным в цепи Тахогенератора.
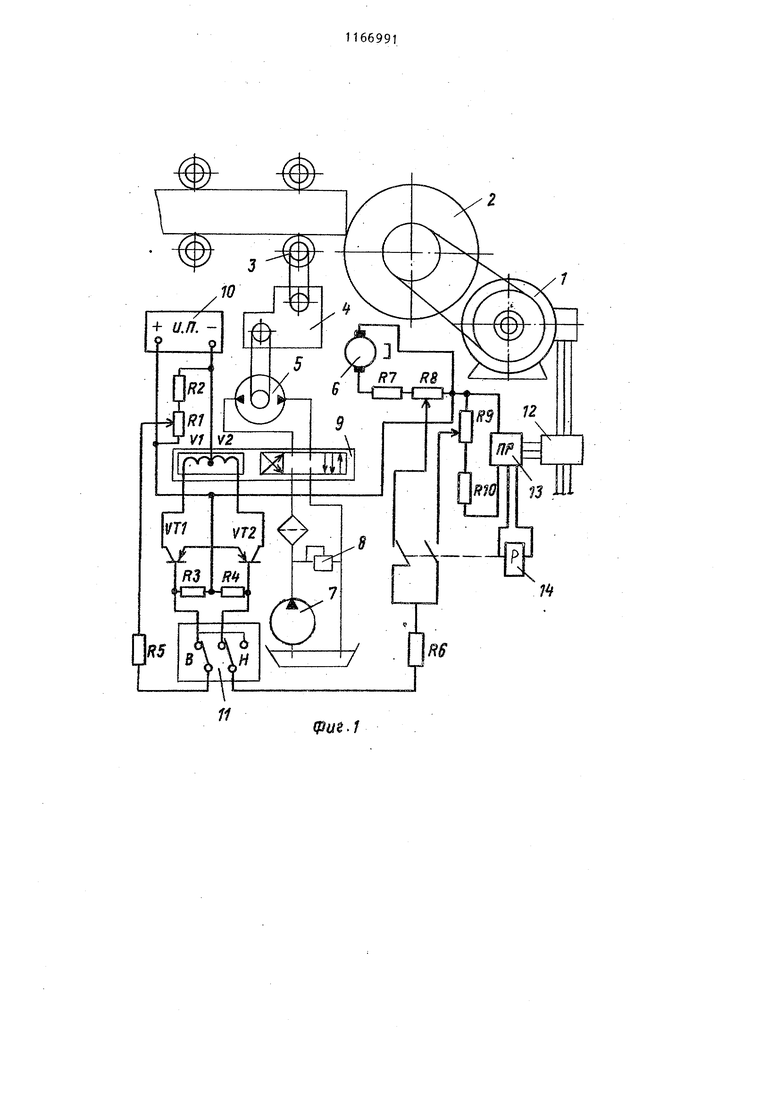
На фиг. 3 позицией 15 обозначен график переходного процесса известного устройства в момент врезания рабочего органа в древесину, а позицией 16.- график переходного процесса предлагаемого устройства.
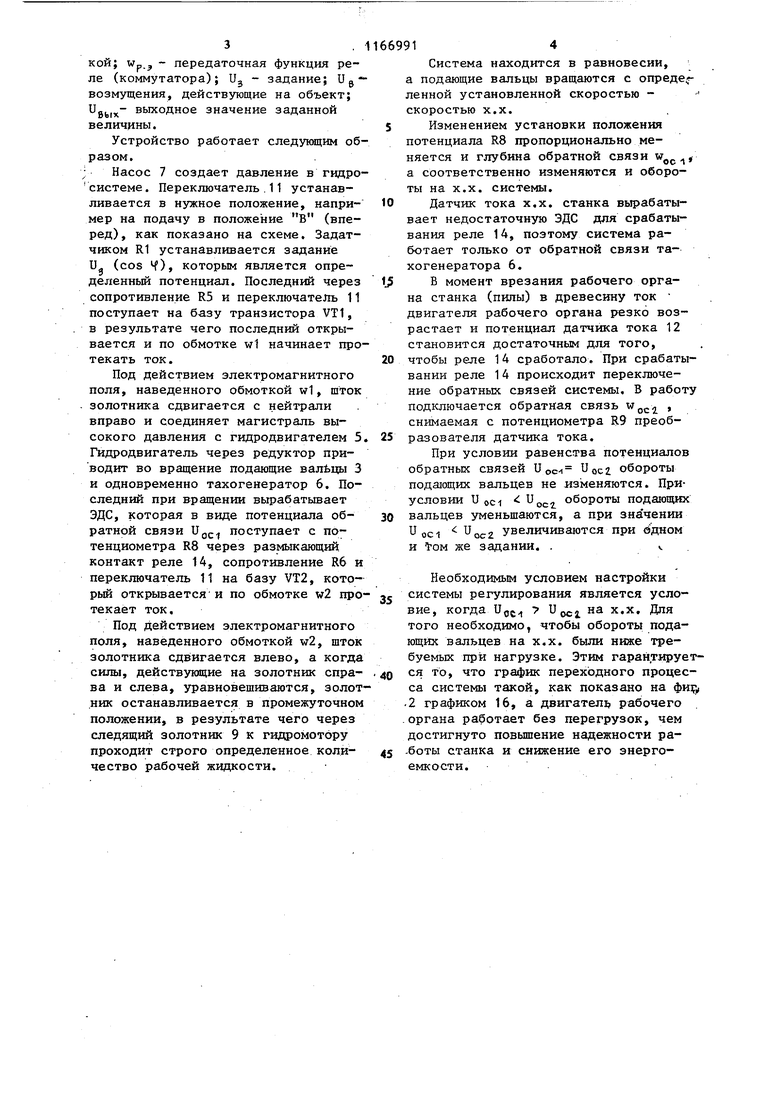
На фиг. 2 функциональные блоки электрогидравлической системы упр авления обозначены соответствующими передаточньми функциями: Wp - передаточная функция регулятора; Wj передаточная функция исполнительного механизма; w - передаточная функция объекта регулирования; W JJJ. - передаточная функция первой обратной связи при работе на х.х.; ocz передаточная функция второй обратной связи при работе под нагруз3.
кой; Wp.3 передаточная функция реле (коммутатора); U - задание; Ug- возмущения, действующие на объект; вых выходное значение заданной величины.
Устройство работает следующим образом.
Насос 7 создает давление в гидросистеме. Переключатель.11 устанавливается в нужное положение, например на подачу в положение В (вперед), как показано на схеме. Задатчиком R1 устанавливается задание и (cos Ч), которым является определенный потенциал. Последний через сопротивление R5 и переключатель 11 поступает на базу транзистора VT1, в результате чего последний открывается и по обмотке w1 начинает протекать ток.
Под действием электромагнитного поля, наведенного обмоткой w1, щток золотника сдвигается с нейтрали вправо и соединяет магистраль высокого давления с гидродвигателем 5 Гидродвигатель через редуктор приводит во вращение подающие валЬцы 3 и одновременно тахогенератор 6. Последний при вращении вырабатывает ЭДС, которая в виде потенциала обратной связи Ugj. поступает с потенциометра R8 через размыкающий, контакт реле 14, сопротивление R6 и переключатель 11 на базу VT2, который открывается и по обмотке w2 протекает ток.
Под действием электромагнитного поля, наведенного обмоткой w2, щток золотника сдвигается влево, а когда силы, действующие на золотник справа и слева, уравновешиваются, золотник останавливается в промежуточном положении, в результате чего через следящий золотник 9 к гидромотору проходит строго определенное количество рабочей жидкости.
669914
Система находится в равновесии, а подающие вальцы вращаются с опреде ленной установленной скоростью скоростью х.х.
5 Изменением установки положения потенциала R8 пропорционально меняется и глубина обратной связи w а соответственно изменяются и обороты на х.х. системы.
10 Датчик тока х.х. станка вырабатывает недостаточную ЭДС для срабатывания реле 14, поэтому система работает только от обратной связи тахогенератора 6.
1 В момент врезания рабочего органа станка (пилы) в древесину ток двигателя рабочего органа резко возрастает и потенциал датчика тока 12 становится достаточным для того,
20 чтобы реле 14 сработало. При срабатывании реле 14 происходит переключение обратных связей системы. В работу подключается обратная связь w , снимаемая с потенциометра R9 преобразователя датчика тока.
При условии равенства потенциалов обратных связей Uoc-i Uocz обороты подающих вальцев не изменяются. Приусловии и ОС1 осг обороты подающих
30 вальцев уменьщаются, а при значении Uoci увеличиваются при бдном и foM же задании. ..
Необходимым условием настройки jij системы регулирования является условие, когда Ujjg 7 Upci на х.х. Для того необходимо, чтобы обороты подающих зальцев на х.х. были ниже требуемых при нагрузке. Этим гарантирует40 ™, что график переходного процесса системы такой, как показано на фи .2 графиком 16, а двигател рабочего .органа работает без перегрузок, чем достигнуто повышение надежности ра45 -боты станка и снижение его энергоемкости.
uy
iuig)
Ugbix
иг.2
tAl
t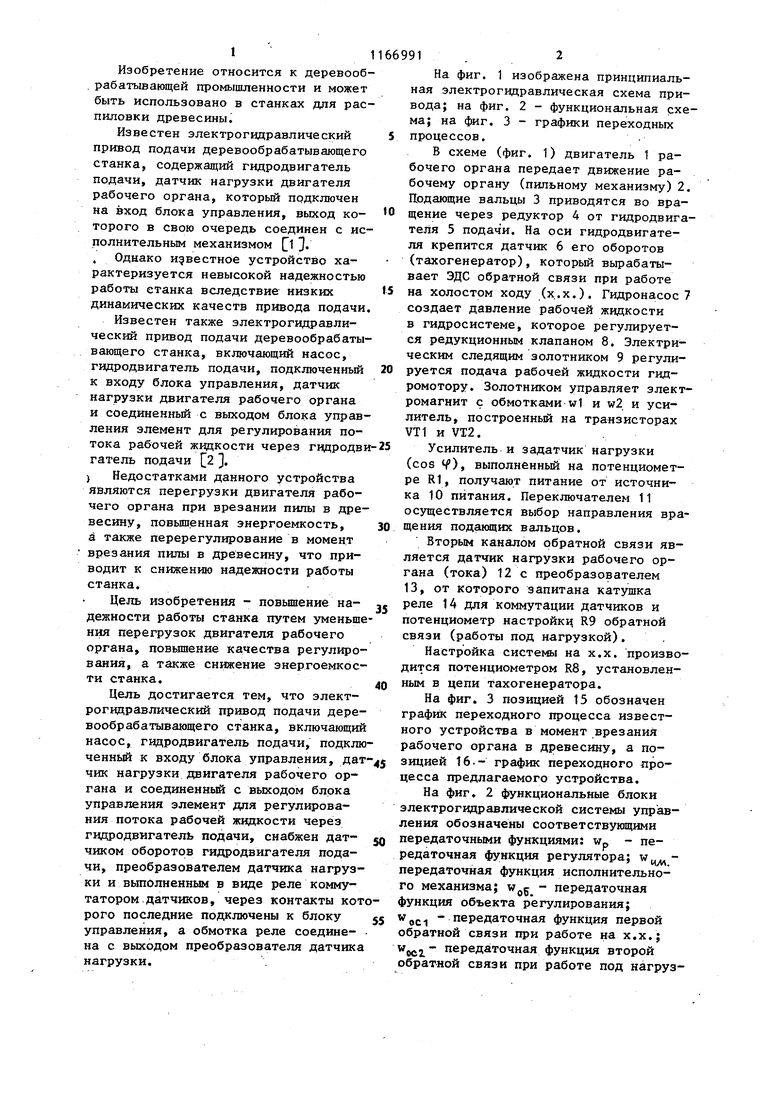
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический привод подачидЕРЕВООбРАбАТыВАющЕгО CTAHKA | 1980 |
|
SU852540A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ПРИВОД ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1967 |
|
SU215102A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1966 |
|
SU185484A1 |
| СПОСОБ УПРАВЛЕНИЯ ЦИКЛОМ ШЛИФОВАНИЯ НА МНОГОИНСТРУМЕНТАЛЬНОМ СТАНКЕ | 1990 |
|
RU2038943C1 |
| Шаговый электрогидравлический привод | 1976 |
|
SU577322A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ПОДАЧИ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1972 |
|
SU350597A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДАЧИ ДЕРЕВООБРАБАТЬГОАЮЩЕГО СТАНКА, включающий насос, гидродвигатель подачи, подключенный к входу блока управления, датчик нагрузки двигателя рабочего органа и соединенньй с выходом блока управления элемент для регулирования потока рабочей жидкости через гидродвигатель подачи, о тлич ающийся тем, что, с целью повышения надежности работы станка путем уменьшения перегрузок двигателя рабочего органа и повьш1ения качества регулирования, а также снижения энергоемкости, приу вод снабжен датчиком оборотов гидродвигателя подачи, преобразователем датчика нагрузки и выполненным в виде, реле коммутатором датчиков, через контакты которого последние подключены к блоку управления, а обмотка реле соединена с выходом преобра(Л зователя датчика нагрузки.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД ПОДАЧИ ДЕРЕВООБРАБАТЫВАЮЩЕГО СТАНКА | 0 |
|
SU361070A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электрогидравлический привод подачидЕРЕВООбРАбАТыВАющЕгО CTAHKA | 1980 |
|
SU852540A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
