Изобретение относится к навигации и может быть использовано для определения курса, координат самолета.
Известен способ определения курса и координат летательного аппарата (ЛА) с помощью теодолита, заключающийся в том, что самолет устанавливается на аэродроме таким образом, чтобы гироблок, над которым размещается теодолит, находился над маркированной точкой с известными координатами и определенном топогеодезическими методами азимуте ΨS ориентира S из этой точки и с помощью теодолита, который направляется сначала вдоль продольной оси самолета, а затем поворачивается на ориентир S, измеряется угол U, тогда курс будет равен: Ψ=Ψs-U, а также устройство, включающее автоколлимационную зрительную трубу, вертикальную ось с горизонтальным кругом, колонку с горизонтальной осью и вертикальным кругом, модуль отсчетной системы, микрометр, отсчетный микроскоп, наводящие устройства [1].
Недостатками данного способа являются большие трудозатраты, необходимость присутствия человека-оператора, что вносит субъективные погрешности, необходимость дополнительной разметки аэродрома и выставке согласно нее ЛА.
Наиболее близкими изобретению являются способ определения курса ЛА оптическим методом с помощью теодолита, установленного на ЛА, и посредством которого определяют направление продольной оси самолета, углы визирования α1, α2, α3 относительно продольной оси ЛА ориентиров O1, О2, О3, установленных в районе аэродрома, при этом известны азимуты двух ориентиров A1 и А2, расстояние между ориентирами R1 и R2, тогда курс определяется как:

где 
β=180°-A2+A1-α1+α3,
а также устройство, реализующее данный способ, включающее визирное устройство, задатчик постоянных величин, блок вычислений [2].
Недостатками данного способа и устройства являются необходимость измерения расстояний между ориентирами, большие трудозатраты, недостаточная точность, связанная с субъективным фактором - присутствием человека-оператора, необходимость больших аппаратурных затрат.
Технической задачей изобретения является повышение точности определения курса и координат ЛА за счет автоматизации процесса измерений при уменьшении трудозатрат.
Решение технической задачи состоит в том, что в способе определения курса и координат самолета, заключающемся в использовании оптических средств и определении угловых положений продольной оси летательного аппарата относительно направления на Север с помощью ориентиров с известными координатами, осуществляют кодовую модуляцию излучения лазера, установленного на вращающейся платформе, в зависимости от угла поворота его луча по часовой стрелке от направления на Север, и регистрируют его излучение оптическими датчиками, установленными на самолете заданным образом, причем два датчика располагают на продольной оси ЛА, декодируют и усиливают полученные сигналы, вычисляют по ним значения курса и координат, используя данные о базисе установки оптических датчиков, при этом курс определяют по формуле: Ψ=360°-[(А*+А)-АA], где АA - угол поворота луча лазера, отсчитываемый от направления на Север до линии встречи луча лазера с датчиком А блока оптических датчиков, А - заданный угол базиса датчиков угла поворота луча лазера, а A* определяется следующим образом:

где AB, ВС - известные стороны базиса оптических датчиков; AA, АB, AC - углы поворота луча лазера, отсчитываемые от направления на Север до линии встречи луча лазера с датчиками А, В, С блока оптических датчиков; А, С - известные углы базиса оптических датчиков;
а координаты ЛА вычисляются как:  и
и 
где Λм и Фм - координаты лазерного ориентира, R - радиус Земли,  - расстояние от лазерного ориентира до ЛА.
- расстояние от лазерного ориентира до ЛА.
Кроме того, при задании базиса датчиков угла поворота луча лазера равнобедренным с углами у основания, равными 45°, угол А*, после тригонометрических преобразований, определяется по формуле:

Реализуется предлагаемый способ за счет того, что на аэродроме в точке с известными координатами располагается лазерный ориентир М с установленным на вращающейся с постоянной скоростью платформе лазером, причем углы поворота луча лазера АA, АB, АC отсчитываются по часовой стрелке от направления на Север до линии встречи луча лазера с соответствующими датчиками, установленными заданным образом на ЛА, блока оптических датчиков с известными базисными расстояниями и углами.
Технический результат при использовании предложенного решения, заключающийся в повышении точности и быстродействия, достигается за счет использования блока лазерного ориентира, блока оптических датчиков, блока постоянных величин и вычислителя, в котором производится расчет значений курса и координат ЛА.
Существенными отличительными признаками от прототипа по способу является следующая совокупность действий:
- используют кодовую модуляцию излучения лазера, установленного на вращающейся платформе, относительно угла поворота его луча;
- отсчитывают углы поворота луча лазера по часовой стрелке от направления на Север;
- регистрируют излучение лазера оптическими датчиками, установленными заданным образом на самолете;
- декодируют и усиливают сигналы с оптических датчиков;
- вычисляют значения курса и координат ЛА, используя полученные с оптических датчиков сигналы и данные о базисных расстояниях и углах между этими датчиками,
по устройству, следующие элементы:
- блок лазерного ориентира, включающий датчик угла луча лазера, кодирующее устройство, лазер, блок оптических датчиков, декодирующее устройство, усилитель.
Наличие существенных отличительных признаков соответствует критерию патентоспособности «новизна».
Анализ известных технических решений в источниках информации позволяет сделать вывод о соответствии изобретения критерию «изобретательский уровень», т.к. в них отличительные от прототипа признаки не выявлены.
На фиг.1 показана схема размещения лазерного ориентира и ЛА с установленным на нем оборудованием в момент определения курса и координат ЛА, на фиг.2 - структурная схема устройства, реализующего предлагаемый способ.
Способ реализуется следующим образом. Из ΔАВМ и ΔСВМ фиг.1 по теореме синусов:  и
и  откуда, учитывая, что из ΔАМС С*=180°-(A+С+A*+AC-AA), получаем:
откуда, учитывая, что из ΔАМС С*=180°-(A+С+A*+AC-AA), получаем:
 откуда
откуда

а курс определяется как: Ψ=360°-[(A*+А)-АA],
координаты определяются следующим образом: из ΔАВМ по теореме синусов  тогда, учитывая известные координаты лазерного ориентира,
тогда, учитывая известные координаты лазерного ориентира,  и
и 
При задании базиса датчиков угла поворота луча лазера равнобедренным с углами у основания, равными 45°, угол А* определяется по формуле:

Устройство содержит блок лазерного ориентира 1, включающий лазер 7, датчик угла луча лазера 5 и кодирующее устройство 6, блок оптических датчиков 2, содержащий базис датчиков 8, 9, 10, декодирующее устройство 11, усилитель 12, блок постоянных величин 3, содержащий задатчики углов А и С 13, 14, задатчики сторон АВ и ВС 15, 16 базиса установки оптических датчиков, задатчики координат лазерного ориентира ΛМ и ФМ 17, 18, вычислитель 4.
При задании базиса датчиков угла поворота луча лазера равнобедренным с углами у основания, равными 45°, блок постоянных величин 3 содержит задатчики угла А 13 и стороны АВ 15 базиса установки оптических датчиков, задатчики координат лазерного ориентира ΛМ и ФМ 17, 18.
Устройство работает следующим образом.
Пропорционально углу поворота луча лазера, получаемому с датчика угла луча лазера 5, в кодирующем устройстве 6 происходит кодирование излучения лазера 7, установленного на вращающейся с постоянной скоростью платформе в точке с известными координатами. Излучение воспринимается оптическими датчиками 8, 9, 10, откуда через декодер 11 и усилитель 12 декодированные сигналы, пропорциональные значениям азимутных углов АA, AB, АC, поступают в вычислитель 4, куда также с блока постоянных величин 3 с задатчиков углов А и С 13, 14, сторон АВ и ВС 15, 16 базиса оптических датчиков и задатчиков координат ΛM и
ФM 17, 18 лазерного ориентира приходят соответствующие сигналы и, где производится вычисление курса Ψ, координат Λ и Ф летательного аппарата согласно выражениям, полученным в предлагаемом способе определения курса и координат.
Источники информации:
1. Бабич, О.А. Авиационные приборы и навигационные системы [текст]. / Под ред. О.А.Бабича. М.: Издание ВВИА им. проф. Н.Е.Жуковского, 1981. - 647 с.
2. Авторское свидетельство СССР №267474 кл. G01C 21/00 4.01.1988 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ, КУРСА И СКОРОСТИ ВОЗДУШНОГО СУДНА | 2012 |
|
RU2506541C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2014 |
|
RU2548366C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2018 |
|
RU2700908C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
Изобретение относится к навигации с помощью наземных средств. Техническим результатом изобретения является повышение точности определения курса и координат летательного аппарата за счет автоматизации процесса измерений при уменьшении трудозатрат. Способ заключается в использовании оптических средств и определении углового положения продольной ости самолета относительно направления на север, используя ориентиры с известными координатами, при этом применяют кодовую модуляцию излучения лазера, расположенного на вращающейся платформе, в зависимости от угла поворота его луча по часовой стрелке от направления на север и регистрируют его излучение оптическими датчиками, установленными на самолете заданным образом, декодируют и усиливают полученные сигналы, вычисляют по ним значения курса, используя данные о базисе установки оптических датчиков. 2 ил.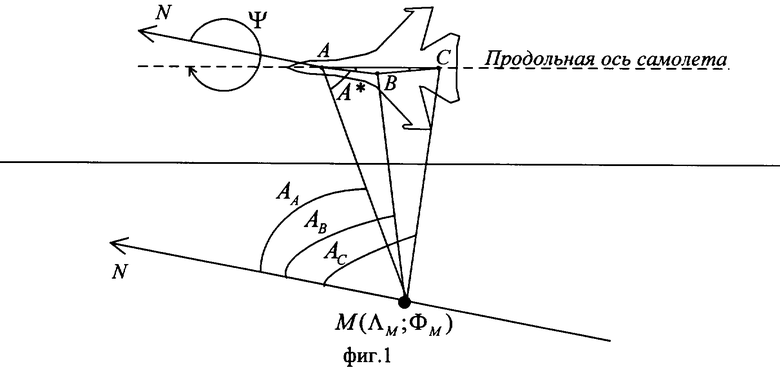
Способ определения курса и координат самолета, заключающийся в использовании оптических средств и определении углового положения продольной оси самолета относительно направления на Север, используя ориентиры с известными координатами, отличающийся тем, что применяют кодовую модуляцию излучения лазера, расположенного на вращающейся платформе, в зависимости от угла поворота его луча по часовой стрелке от направления на Север и регистрируют его излучение оптическими датчиками, установленными на самолете заданным образом, затем декодируют и усиливают полученные сигналы, вычисляют по ним значения курса, используя данные о базисе установки оптических датчиков, следующим образом: ψ=360°-[(A*+A)-АA], где АA - угол поворота луча лазера, отсчитываемый от направления на Север до линии встречи луча лазера с датчиком А блока оптических датчиков, А* определяется как

где АВ, ВС - заданные базисные расстояния между оптическими датчиками, AC - заданные базисные углы между оптическими датчиками, АA, AB, АC - углы поворота луча лазера, отсчитываемые от направления на Север до линии встречи луча лазера с датчиками А, В, С соответственно и координат летательного аппарата
 ,
,
где Λм и Фм - известные координаты лазерного ориентира, R - радиус Земли,  - расстояние от лазерного ориентира до летательного аппарата (ЛА).
- расстояние от лазерного ориентира до летательного аппарата (ЛА).
| Камерная печь с выдвижным подом | 1984 |
|
SU1255836A1 |
| US 4536763 А, 20.08.1985 | |||
| Прибор для определения курса самолета | 1928 |
|
SU17766A1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| Компас | 1930 |
|
SU22925A1 |

