Устройство относится к локационным системам обеспечения безопасности автомобиля при движении в условиях, когда существует опасность столкновения с неожиданно появившимся препятствием.
Известны попытки создания устройств подобного назначения для повышения безопасности управления автомобилем. Например: система предупреждения столкновений APCS фирмы «Toyota» для автомобилей серии Lexus LS, в которой используются три видеокамеры, две из которых направлены вперед в направлении движения, а третья - на лицо водителя для определения степени его внимания: адаптивная система управления скоростью автомобиля фирмы Daimler-Benz AG, представляющая собой доплеровскую РЛС: оптическая система City Safety фирмы «Вольво» для предупреждения столкновений при движении на малой скорости (менее 15 км/ч) в условиях городского движения: система радиовидения «АвтоРадар», предложенная специалистами МГАИ ("Электроника НТБ, 2000, №5"), которая работает в миллиметровом диапазоне длин волн и построена на основе классических радиолокационных принципов, использующих сканирование радиолуча в пространстве, при этом полученная информация выводится на обзорный экран, где формируется соответствующее радиолокационное изображение. Известен также радар безопасности движения, разработанный Самарским техническим университетом совместно с НИИ «Экран», в котором используются одновременно непрерывный немодулированный и импульсный зондирующий сигналы, с помощью которых оценивается скорость движения автомобиля и текущая дальность и формируется сигнал предупреждения в случае достижения критического состояния этих величин.
Недостатками аналогов являются применение методов сканирования пространства, ведущее к увеличению сложности устройств обеспечения безопасности автомобиля, ухудшению их массогабаритных показателей, трудности размещения на автомобиле, недостаточно высокие разрешающая способность и быстродействие, сложные и избыточные системы выдачи и отображения информации, которые затрудняют работу водителя, так как требуют отвлечения его внимания от дорожной обстановки.
Целью изобретения является предотвращение столкновения автомобиля с препятствиями путем предупреждения водителя о наличии препятствий, направлении и расстояния до них без отвлечения его внимания от дорожной обстановки и путем включения систем управления и торможения автомобиля в случае создания аварийной обстановки.
Цель изобретения достигается тем, что предлагаемое устройство содержит набор идентичных интегрированных модулей, включающих в себя несканирующую, астигматическую, приемопередающую оптическую систему, которая одновременно формирует диаграммы направленности импульсного дальномерного и непрерывного доплеровского оптических локаторов, работающих в разных диапазонах длин волн. К выходу импульсного дальномерного оптического локатора каждого модуля подключены m временных селекторов, выделяющих соответствующие интервалы дистанции до препятствия. К выходу непрерывного доплеровского оптическою локатора модуля подключены k полосовых частотных фильтра, выделяющих интервалы относительных скоростей сближения с препятствием. Выходы временных селекторов и полосовых частотных каждого модуля подключены к соответствующим входам системы обработки информации, в которую также поступает информация о собственной скорости автомобиля. Выходы системы обработки информации подключены к системам светового и звукового предупреждения водителя, которые с помощью световых и звуковых сигналов сообщают о наличии, направлении и расстоянии до препятствия, а также к бортовому компьютеру, управляющему параметрами движения автомобиля.
Изобретение поясняется чертежом.
На чертеже изображено: интегрированные модули 1i, несканирующие астигматические приемопередающие оптические системы 2i, импульсные дальномерные оптические локаторы 3i, непрерывные доплеровские оптические локаторы 4i, где i=1...n, временные селекторы 5ij, где j=1...m, полосовые частотные фильтры 6it, где t=1...k, система обработки информации 7, система звукового предупреждения 8, система светового предупреждения 9, измеритель собственной скорости автомобиля 10, бортовой компьютер автомобиля 11.
Устройство предупреждения столкновения автомобиля с препятствиями работает следующим образом.
Каждый из интегрированных модулей 1i устройства расположен и ориентирован на автомобиле таким образом, что отвечает за свой сектор наблюдения за дорожной обстановкой, при этом несканирующие астигматические приемопередающие оптические системы 2i формируют диаграммы направленности импульсного дальномерного оптического локатора 3i и непрерывного доплеровского оптического локатора 4i. Диапазон дальности обнаружения импульсного дальномерного оптического локатора 3i с помощью временных селекторов 5ij разбит на ряд интервалов, величины которых определяются совокупностью таких параметров, как дальность обнаружения, предельная относительная скорость сближения с препятствием, время реакции водителя, быстродействие системы торможения и другие. Аналогично, диапазон измерения относительных скоростей сближения с препятствием с непрерывного доплеровского оптического локатора 4i при помощи полосовых частотных фильтров 6it разбит на ряд интервалов относительных скоростей сближения. В случае появления препятствия на пути движения автомобиля сигналы с импульсного дальномерного оптического локатора 3i и непрерывного доплеровского оптического локатора 4i, несущие информацию о расстоянии, направлении и скорости сближения с препятствием, через соответствующие временные селекторы 5ij и полосовые частотные фильтры 6it поступают в систему обработки информации 7. Одновременно в нее поступают сигналы с измерителя собственной скорости автомобиля 10. Система обработки информации 7 проводит идентификацию секторов приема сигналов от препятствия, определяет интервалы расстояний до них, относительные скорости сближения и оценивает степень опасности столкновения. Сигналы предупреждения о наличии, направлении и степени сближения с препятствием выводятся на систему звукового предупреждения 8 и систему светового предупреждения 9 в наиболее простой, наглядной и эргономичной форме, не требующей отвлечения водителя от дорожной обстановки. В случае аварийной обстановки или замедленной реакции водителя система обработки информации 7 через бортовой компьютер 11 приводит в действие систему управления или экстренного торможения автомобиля.
Состав устройства, его автономность от стандартной электроники автомобиля позволяет сформировать систему с использованием идентичных конструктивных модулей, которые благодаря малым габаритам могут быть расположены совместно с передними (задними) фарами автомобиля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЯ С ПРЕПЯТСТВИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429505C1 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЯ С ПРЕПЯТСТВИЕМ | 2010 |
|
RU2429506C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА И ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384862C2 |
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ВЕРТОЛЕТА | 2006 |
|
RU2322683C2 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ПРЕПЯТСТВИЯМИ | 2007 |
|
RU2370786C2 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| РАДАР БЕЗОПАСНОСТИ ДВИЖЕНИЯ АВТОМОБИЛЬНОГО ТРАНСПОРТА | 1992 |
|
RU2092869C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНЫХ СРЕДСТВ ПРИ ДВИЖЕНИИ В КОЛОННЕ | 2007 |
|
RU2388057C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2676854C2 |
Устройство относится к локационным системам обеспечения безопасности автомобиля при движении. Достигаемым техническим результатом изобретения является предотвращение столкновения автомобиля с препятствиями путем предупреждения водителя о препятствии. Предлагаемое устройство содержит набор идентичных интегрированных модулей, включающих в себя несканирующую, астигматическую, приемопередающую оптическую систему, которая одновременно формирует диаграммы направленности импульсного дальномерного и непрерывного доплеровского оптических локаторов. К выходу импульсного дальномерного оптического локатора каждого модуля подключены временные селекторы, выделяющие соответствующие интервалы дистанции до препятствия. К выходу непрерывного доплеровского оптического локатора модуля подключены полосовые частотные фильтры, выделяющие интервалы относительных скоростей сближения с препятствием. Выходы временных селекторов и полосовых частотных фильтров каждого модуля подключены к системе обработки информации, в которую также поступает информация о собственной скорости автомобиля. Выходы системы обработки информации подключены к системам светового и звукового предупреждения водителя о наличии, направлении и расстоянии до препятствия, а также к бортовому компьютеру, управляющему параметрами движения автомобиля. 1 ил.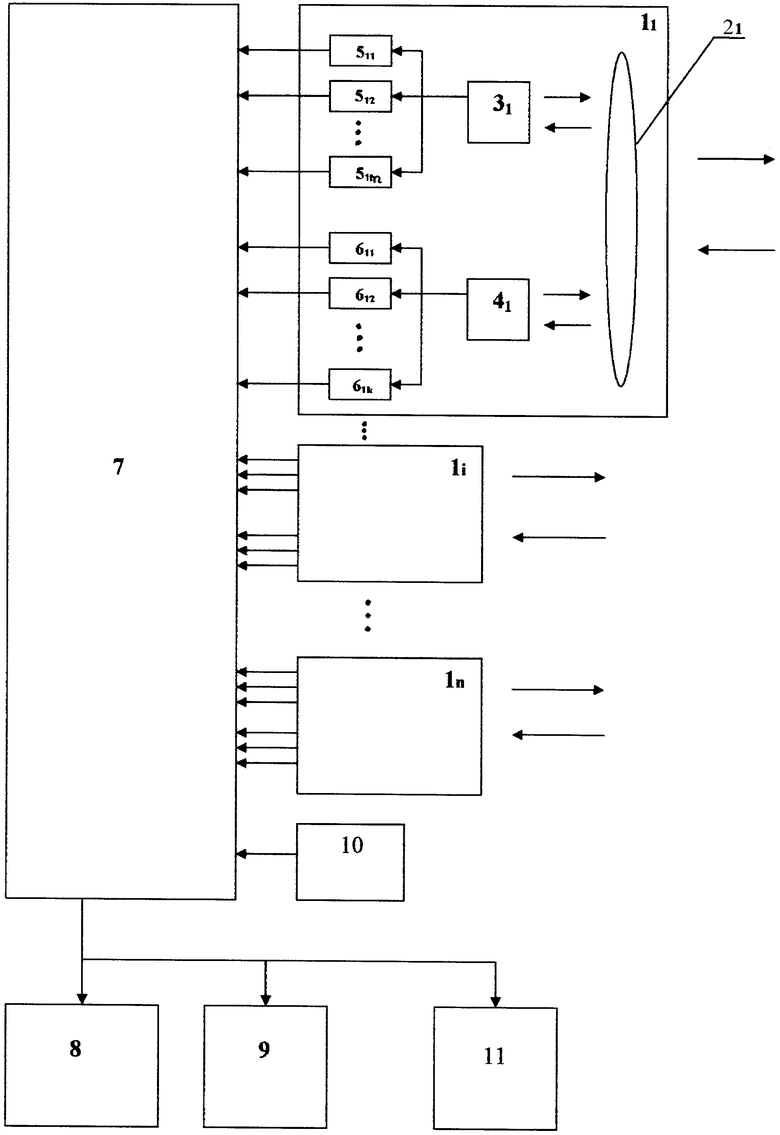
Устройство предупреждения столкновения автомобиля с препятствием, состоящее из набора идентичных интегрированных модулей, каждый из которых содержит приемопередающую оптическую систему, импульсный дальномерный и непрерывный доплеровский оптические локаторы, работающие на разных длинах волн, системы обработки информации, системы светового и системы звукового предупреждения, измерителя собственной скорости автомобиля и бортового компьютера автомобиля, отличающееся тем, что приемопередающая оптическая система каждого модуля выполнена несканирующей астигматической, сопряженной, одновременно, с импульсным дальномерным оптическим локатором и непрерывным доплеровским оптическим локатором, и формирующей стационарные по отношению к автомобилю диаграммы направленности этих локаторов, к выходу импульсного дальномерного оптического локатора подключены входы «m» временных селекторов, а к выходу непрерывного доплеровского оптического локатора подключены входы «k» полосовых частотных фильтров, выходы всех временных селекторов и полосовых частотных фильтров соединены с соответствующими входами системы обработки информации, идентифицирующей сектора приема сигналов от препятствий, интервалы расстояний до них, относительные скорости сближения и оценивающей степень опасности столкновения, к дополнительному входу системы обработки информации подключен выход измерителя собственной скорости автомобиля, к выходу системы обработки информации присоединены входы систем звукового и светового предупреждения, которые с помощью звуковых и световых сигналов предупреждают водителя о направлении, расстоянии до препятствия и степени опасности столкновения с препятствием, а также вход бортового компьютера автомобиля, который выдает команды на системы управления и торможения автомобиля.
| «Электроника» | |||
| Система радиовидения «АвтоРадар», 2000, №5 | |||
| Способ определения окиси алюминия в металлической алюминиевой пудре | 1940 |
|
SU61052A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1993 |
|
RU2092902C1 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
| WO 2004055547 A1, 01.07.2004 | |||
| Источник сейсмических сигналов | 1988 |
|
SU1672389A1 |
| US 6763318 B1, 13.07.2004. | |||

