Устройство относится к оптическим локационным системам обеспечения безопасности полета вертолета в сложных условиях, например при проведении строительно-монтажных и спасательных работ, полетов в горных и городских условиях, где существует опасность столкновения с препятствиями, зачастую малоразмерными и плохо различаемыми.
Известны устройства для обеспечения безопасности полета летательных аппаратов, использующие оптические и радиолокационные (99122795/09, кл. G01S 13/93; 5005389/22 и 5047611/09, кл. G01S 17/00), а также тепловизионные и комбинированные системы (разработка НПО ГИПО г.Казань), предназначенные для предупреждения столкновения при полете по маршруту.
К недостаткам этих устройств относятся применение методов сканирования окружающего пространства, ведущее к увеличению сложности устройств для обеспечения безопасности полетов и, как следствие, ухудшению их массогабаритных показателей и повышению стоимости, и сложные, избыточные системы выдачи и отображения информации, которые затрудняют работу пилотов.
Более близкой к задаче, решаемой данным изобретением, является радиолокационная система предупреждения столкновений летательного аппарата с препятствиями, описанная в патенте РФ №2150752(1), кл. G01S 13/93 и выбранная нами в качестве прототипа. В этой системе для расширения углов обзора в горизонтальной плоскости используются «…дополнительные каналы, идентичные первому (курсовому), при этом приемная и передающая антенны каждого канала выполнены в виде планарной микроэлектронной фазированной антенной решетки (ПМФАР), размещенной на соответствующем участке поверхности корпуса летательного аппарата заподлицо с его обшивкой таким образом, что направление максимума диаграммы направленности ПМФАР в вертикальной плоскости совпадает с плоскостью полета летательного аппарата, а направление максимума в горизонтальной плоскости обеспечивает просмотр передней полусферы». Каждый из дополнительных каналов отвечает за просмотр своего сектора передней полусферы. Для просмотра каждого сектора используется метод линейной частотной модуляции, когда при изменении частоты передатчика изменяется направление максимума диаграммы направленности ПМФАР в горизонтальной плоскости. Эта же частотная модуляция используется для измерения расстояния до препятствия.
К недостаткам прототипа, препятствующим его использованию в указанных выше целях, следует отнести:
1. Использование ПМФАР, обладающей малым углом раскрыва диаграммы направленности, что потребовало «просмотра» сектора обзора.
2. Использование для «просмотра» частотной модуляции, что неизбежно приведет к изменению положения максимума диаграммы направленности в вертикальной плоскости и сделает невозможным применение системы при полетах на малых высотах, так как она будет квалифицировать в качестве препятствия поверхность земли.
3. Необходимость размещения ПМФАР «заподлицо» с обшивкой летательного аппарата во многих местах делает возможным ее установку только в заводских условиях, что лишает данную систему «автономности» с точки зрения ее установки и демонтажа в аэродромных условиях.
4. Применение ПМФАР не позволяет системе эффективно работать на малых расстояниях, где в ближней зоне не «успевает» сформироваться узкая диаграмма направленности, что приводит к существенному увеличению минимальных рабочих дистанций и делает ее неприемлемой для вертолетных систем безопасности.
Целью изобретения является обеспечение кругового обзора для системы предупреждения пилота вертолета о наличии препятствий и повышение ее эффективности за счет упрощения представления информации о наличии препятствия, направлении и расстояния до него.
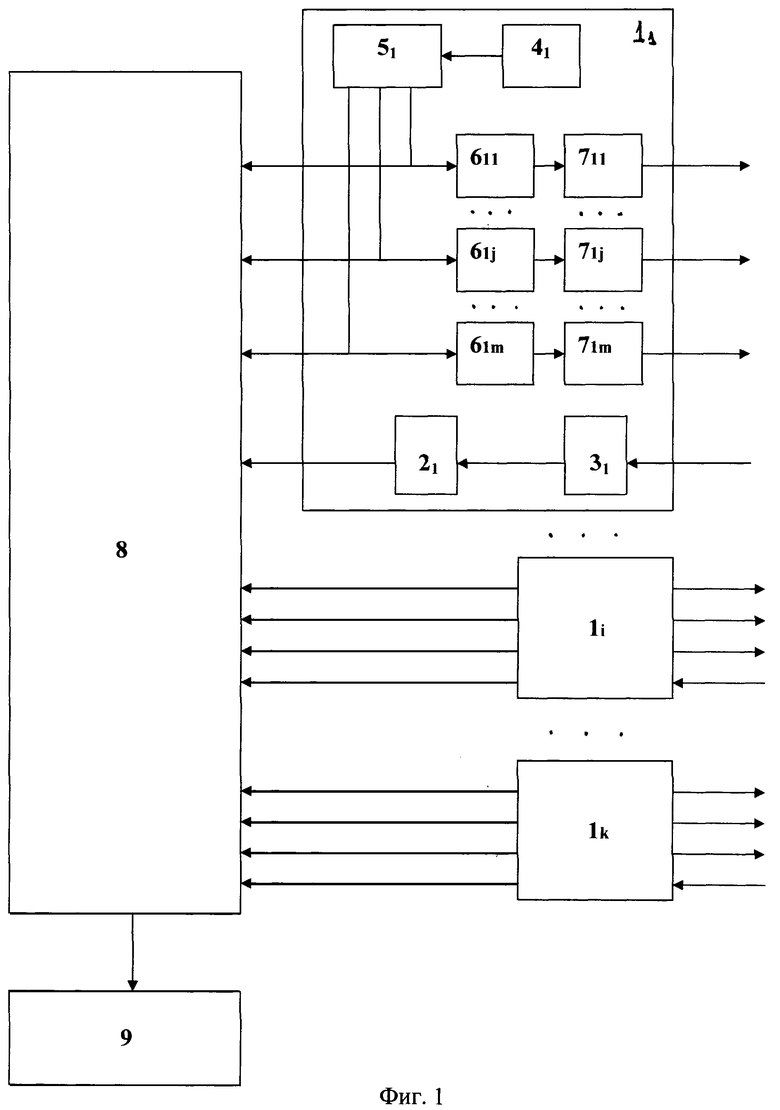
Цель изобретения достигается тем, что предлагаемая система содержит «k» идентичных приемо-передающих модуля, включающих в себя оптический приемник, вход которого подключен к приемной несканирующей астигматической оптической системе, принимающей в секторе с плоским углом 360°/k и малом вертикальном угле, передающая система каждого модуля содержит модулятор со своим законом модуляции, который через блок управления формирует сигналы «m» оптических импульсных передатчиков, каждый из которых подключен к своей передающей несканирующей астигматической оптической системе, излучающей в секторе с плоским углом 360°/mk, сектора передающих и приемных оптических систем внутри и между модулями сопряжены и образуют плоскую круговую систему обзора с углом 360°. Выходы оптических приемников модулей подключены к «k» входам системы обработки информации, на которую также поступает информация с «mxk» выходов блоков управления оптическими передатчиками модулей. Выход системы обработки информации подключен к системе предупреждения пилота, которая с помощью световых и звуковых сигналов сообщает о наличии, направлении и расстоянии до препятствия.
Изобретение поясняется чертежами.
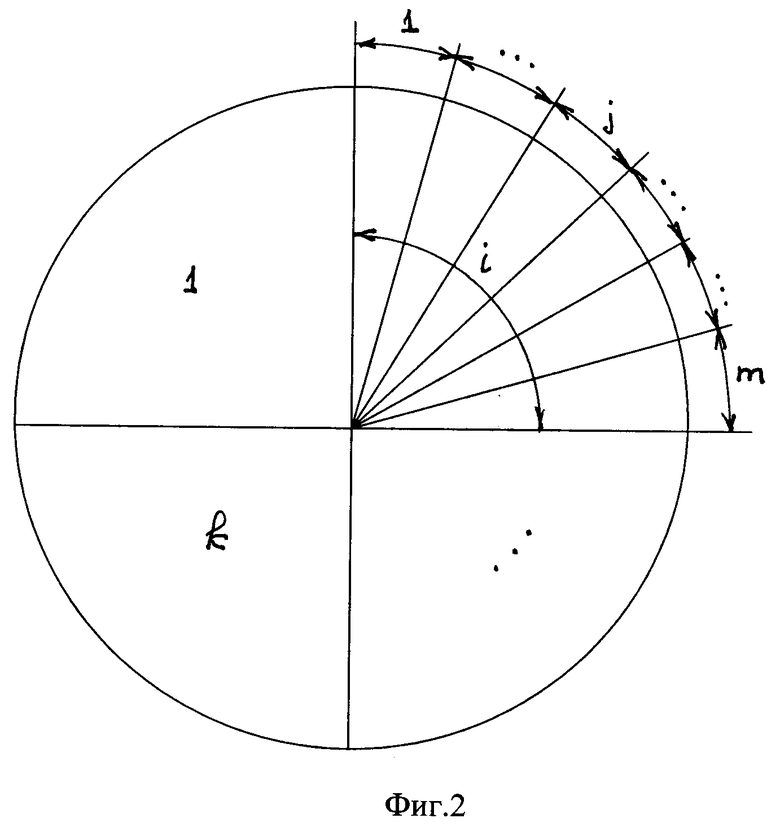
На фиг.1 изображено: приемо-передающие модули 1i, оптические приемники излучения 2i, оптические приемные системы 3i, модуляторы 4i, блоки управления 5i, импульсные оптические передатчики 6ij, передающие оптические системы 7ij, где i=1…k, j=1…m, система обработки информации 8 и система отображения информации 9. На фиг.2 показано взаимное расположение секторов излучения и приема оптических сигналов в модуле.
Устройство обеспечения безопасности полета вертолета работает следующим образом.
Оптические передатчики 6ij модуля 1i по закону, задаваемому блоком управления 5i, излучают короткие световые импульсы с частотой модулятора 4i через оптическую систему 7ij, в секторе с плоским углом 360°/mk, при этом совокупность всех оптических передатчиков излучает в плоском угле 360° в плоскости, перпендикулярной вертикальной оси вертолета. Оптический сигнал, отраженный препятствием, находящимся в секторе передающей оптической системы 7ij, через приемную оптическую систему 3i поступает на оптический приемник излучения 2i. Сигнал с приемника излучения передается в систему обработки информации 8, куда одновременно поступают сигналы со всех «m×k» выходов блоков управления 5i оптических передатчиков. Система обработки информации 8 проводит идентификацию секторов излучения и приема сигналов от препятствия путем сравнения сигналов с «m×k» выходов блоков управления 5i оптических передатчиков и «k» оптических приемников, а также определяет интервалы расстояний до препятствия. На основе этой информации с помощью системы отображения информации 9 формируются световые и звуковые сигналы для предупреждения пилота о направлении и расстоянии до препятствия. При этом обеспечивается сведение информации об источниках опасности к минимуму, необходимому и достаточному пилоту для принятия решения.
Состав устройства, его автономность от стандартной авионики вертолета позволяют сформировать систему кругового обзора с использованием идентичных конструктивных модулей, включающих в себя приемник оптического излучения, модулятор, блок управления, излучающие и приемную оптические системы, оптические импульсные передатчики, которые для удобства монтажа и обслуживания могут быть размещены на внешней подвеске вертолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА ВЕРТОЛЕТА | 2006 |
|
RU2322683C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА И ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384862C2 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2516244C2 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЯ С ПРЕПЯТСТВИЕМ | 2007 |
|
RU2348948C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА БЛИЖНЕГО ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ПРЕПЯТСТВИЯМИ МАНЕВРИРУЮЩИХ НА АЭРОДРОМЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2001 |
|
RU2192653C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОЙ ПОСАДКИ ВЕРТОЛЕТА В УСЛОВИЯХ ОТСУТСТВИЯ ИЛИ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2014 |
|
RU2561496C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЯ С ПРЕПЯТСТВИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429505C1 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЯ С ПРЕПЯТСТВИЕМ | 2010 |
|
RU2429506C1 |
| УСТРОЙСТВО ИНДИКАЦИИ ОПАСНОСТИ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2131622C1 |
| ВЕРТОЛЕТНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2007 |
|
RU2344439C1 |
Изобретение может использоваться в качестве автономной системы предупреждения столкновений, обеспечивающей безопасность полета вертолетов. Достигаемым техническим результатом является обеспечение кругового обзора для системы предупреждения пилота вертолета о наличии препятствий. Указанный результат обеспечивается за счет определения направления на препятствие и расстояния до него в поле зрения с плоским углом 360° с помощью устройства, содержащего «k» идентичных приемо-передающих модулей, включающих в себя оптический приемник, вход которого подключен к приемной несканирующей астигматической оптической системе, принимающей в секторе с плоским углом 360°/k и малом вертикальном угле, передающая система каждого модуля содержит модулятор со своим законом модуляции, который через блок управления формирует сигналы «m» оптических импульсных передатчиков, каждый из которых подключен к своей передающей несканирующей астигматической оптической системе, излучающей в секторе с плоским углом 360/mk, сектора передающих и приемных оптических систем внутри и между модулями сопряжены и образуют плоскую круговую систему обзора с углом 360°. Выходы оптических приемников модулей подключены к «k» входам системы обработки информации, на которую также поступает информация с «m×k» выходов блоков управления оптическими передатчиками модулей. Выход системы обработки информации подключен к системе предупреждения пилота, которая с помощью световых и звуковых сигналов сообщает о наличии, направлении и расстоянии до препятствия. 2 ил.
Устройство обеспечения безопасности полета и посадки вертолета, состоящее из «k» идентичных модулей, каждый из которых содержит приемную и передающие оптические системы, модулятор, приемник оптических сигналов и «т» оптических импульсных передатчиков, а также из системы обработки информации, идентифицирующей сектора излучения и приема сигналов от препятствия и определяющей интервалы расстояний до препятствия, и системы предупреждения, отличающееся тем, что приемник оптических сигналов каждого модуля подключен к несканирующей астигматической оптической системе, принимающей в плоскости вертолета в секторе с плоским углом 360°/k и в малом вертикальном угле, «т» выходов оптических импульсных передатчиков каждого модуля соединены со своими передающими оптическими системами, которые также выполнены несканирующими астигматическими, излучающими в плоскости вертолета в секторе с плоским углом 360°/mk, поля зрения «m» передающих оптических систем каждого модуля совмещены с полем зрения приемной оптической системы и полностью перекрывают его, поля приема «k» модулей сопряжены и образуют в плоскости вертолета угол обзора 360°, выход модулятора каждого модуля подключен к блоку управления, предназначенному для задания оптическим импульсным передатчикам закона излучения коротких световых импульсов с частотой модулятора, «m» выходов которого подключены к входам импульсных оптических передатчиков, «k» выходов оптических приемников модулей соединены с «k» входами системы обработки информации, на еще «mxk» входов которой подаются также сигналы с «mxk» выходов блоков управления, выход системы обработки информации подключен к системе отображения информации, которая с помощью звуковых и световых сигналов предупреждает пилота вертолета о расстоянии до препятствия и секторе, в котором оно находится.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ | 1999 |
|
RU2150752C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОЛЕТЕ НА МАЛОЙ ВЫСОТЕ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2095280C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 1999 |
|
RU2176400C2 |
| DE 3501954 A1, 24.07.1986 | |||
| EP 0464263 A2, 08.01.1992 | |||
| US 5884223 A, 16.03.1996 | |||
| US 5677842 A, 14.10.1997. | |||

