Изобретение относится к монетным или подобным автоматам для выдачи отдельных изделий и, в частности, к механизмам перемещения изделий для торгового автомата.
Известен механизм перемещения изделий для торгового автомата, имеющего проем для приема падающего изделия и нишу выдачи изделия, содержащий устройство перемещения изделия к нише выдачи изделия и привод этого устройства (патент США N 4961507, кл. G07F 11/00, публ. 1990 г.).
Однако известный механизм для торгового автомата не позволяет осуществить доступ к заданному изделию, кроме того, направляет изделия к нише выдачи изделий под действием их тяжести.
Известен также механизм перемещения изделий для торгового автомата (патент РФ №2117622, МПК G07F 11/00, публ. 20.08.1998 г.). Механизм перемещения содержит средство захвата товара, снабженное механизмом управления, механизм перемещения средства захвата от зоны захвата товара до приемной ниши выдачи товара и устройство привода. Механизм обеспечивает подачу изделий в положение, удобное для того, чтобы брать их в торговом автомате.
Данное техническое решение по своему функциональному назначению и по своей технической сущности является наиболее близким к заявляемому и принято за прототип.
Однако известный механизм перемещения изделий для торгового автомата, так же как и предыдущий аналог, не позволяет осуществить доступ к заданному изделию.
Задачей настоящего изобретения является создание механизма перемещения изделий для торгового автомата, который позволил бы осуществлять доступ к любому выбранному изделию из всех находящихся в торговом автомате и перемещение его к нише выдачи.
Поставленная задача решается тем, что в механизме перемещения изделий для торгового автомата, содержащем средство захвата товара, снабженное механизмом управления, механизм перемещения средства захвата от зоны захвата товара до приемной ниши средства выдачи товара, средство захвата товара содержит поддон, П-образную жесткую раму, коромысла, свободные концы которых жестко скреплены с захватами, поворотный фланец, снабженный механизмом поворота, при этом коромысла выполнены в виде пластин с торцевыми отгибами, причем торцевые отгибы, выполненные наружу, снабжены соосными отверстиями, а торцевые отгибы пластины, выполненные внутрь, снабжены выступами, кроме того, коромысло скреплено с П-образной жесткой рамой с возможностью шарнирного поворота вокруг оси, параллельной продольной оси П-образной жесткой рамы, для чего боковые элементы последней снабжены петлями, через которые и соосные отверстия наружных торцевых отгибов пропущены осевые стяжки, кроме того, поворотный фланец размещен с возможностью поворота вокруг оси, параллельной продольной оси П-образной жесткой рамы, причем каждое коромысло связано с поворотным фланцем посредством тяги, концы каждой из которых связаны с поворотным фланцем и выступом внутреннего торцевого отгиба коромысла посредством шарнира с осью вращения, параллельной продольной оси П-образной жесткой рамы, кроме того, боковые поверхности П-образной жесткой рамы снабжены колесами, размещенными с возможностью перемещения в направляющих, закрепленных на бортах поддона, кроме того, П-образная жесткая рама снабжена приводом возвратно-поступательного движения по поддону, кроме того, длина захватов вдоль продольной оси П-образной жесткой рамы превышает ширину коромысла, при этом с поддоном скреплены П-образные опорные скобы, расположенные параллельно друг другу, верхние элементы которых размещены ниже захвата в крайнем нижнем его положении и ориентированы вдоль продольной оси П-образной жесткой рамы, кроме того, с поддоном на его бортах с наружной стороны жестко скреплены пластины, расположенные параллельно друг другу и ориентированные вдоль вертикальной оси поддона, причем пластины размещены на равном расстоянии от торцов поддона, высота пластин превышает высоту П-образных опорных скоб, наружные поверхности пластин снабжены колесами, которые ориентированы вдоль вертикальной оси пластин, механизм перемещения средства захвата содержит вертикальные направляющие, горизонтальные направляющие, размещенные в верхней части торгового автомата, и каретку, выполненную в виде поддона и снабженную приводом для возвратно-поступательного перемещения по горизонтальным направляющим, на поддоне каретки установлен привод вертикального перемещения средства захвата товара, с боковыми сторонами поддона каретки жестко скреплены верхние части вертикальных направляющих, нижние части которых жестко скреплены между собой, колеса пластин средства захвата выполнены с возможностью перемещения по вертикальным направляющим механизма перемещения.
Привод возвратно-поступательного движения П-образной жесткой рамы по поддону содержит два барабана, установленные у торцов поддона, с возможностью вращения вокруг вертикальных осей, на которые надет замкнутый поводок, скрепленный с П-образной жесткой рамой, при этом один из барабанов снабжен приводом вращения.
Привод возвратно-поступательного движения каретки по горизонтальным направляющим содержит два барабана, установленные на концах горизонтальных направляющих, с возможностью вращения вокруг вертикальных осей, на которые надет замкнутый поводок, скрепленный с поддоном каретки, при этом один из барабанов снабжен приводом вращения.
Привод возвратно-поступательного движения средства захвата по вертикальным направляющим содержит барабан, установленный на поддоне каретки с возможностью вращения вокруг горизонтальной оси, на барабан надет поводок, один конец которого закреплен на барабане, а другой на поддоне средства захвата, при этом барабан снабжен приводом вращения.
В заявленном механизме перемещения товара для торгового автомата общими признаками для него и для его прототипа являются:
- средство захвата товара, снабженное механизмом управления;
- механизм перемещения средства захвата от зоны захвата товара до приемной ниши средства выдачи товара.
Сопоставительный анализ заявляемого технического решения и прототипа показывает, что первое имеет в отличие от прототипа следующие существенные признаки:
- средство захвата товара, которое содержит:
- поддон, П-образную жесткую раму, коромысла, свободные концы которых жестко скреплены с захватами, поворотный фланец, снабженный механизмом поворота, при этом коромысла выполнены в виде пластин с торцевыми отгибами, причем торцевые отгибы, выполненные наружу, снабжены соосными отверстиями, а торцевые отгибы, выполненные внутрь, снабжены выступами, кроме того, коромысло скреплено с П-образной жесткой рамой с возможностью шарнирного поворота вокруг оси параллельной продольной оси П-образной жесткой рамы, для чего боковые элементы последней снабжены петлями, через которые и соосные отверстия наружных торцевых отгибов пропущены осевые стяжки, кроме того, поворотный фланец размещен с возможностью поворота вокруг оси параллельной продольной оси П-образной жесткой рамы, причем каждое коромысло связано с поворотным фланцем посредством тяги, концы каждой из которых связаны с поворотным фланцем и выступом внутреннего торцевого отгиба коромысла посредством шарнира с осью вращения параллельной продольной оси П-образной жесткой рамы, кроме того, боковые поверхности П-образной жесткой рамы снабжены колесами, размещенными с возможностью перемещения в направляющих, закрепленных на бортах поддона, кроме того, П-образная жесткая рама снабжена приводом возвратно-поступательного движения по поддону, кроме того, длина захватов вдоль продольной оси П-образной жесткой рамы превышает ширину коромысла, при этом с поддоном скреплены П-образные опорные скобы, расположенные параллельно друг другу, верхние элементы которых размещены ниже захвата в крайнем нижнем его положении и ориентированы вдоль продольной оси П-образной жесткой рамы, кроме того, с поддоном на его бортах с наружной стороны жестко скреплены пластины, расположенные параллельно друг другу и ориентированные вдоль вертикальной оси поддона, причем пластины размещены на равном расстоянии от торцов поддона, высота пластин превышает высоту П-образных опорных скоб, наружные поверхности пластин снабжены колесами, которые ориентированы вдоль вертикальной оси пластин;
- механизм перемещения средства захвата содержит вертикальные направляющие, горизонтальные направляющие, размещенные в верхней части торгового автомата, и каретку, выполненную в виде поддона и снабженную приводом для возвратно-поступательного перемещения по горизонтальными направляющим, на поддоне каретки установлен привод вертикального перемещения средства захвата товара, с боковыми сторонами поддона каретки жестко скреплены верхние части вертикальных направляющих, нижние части которых жестко скреплены между собой, колеса пластин средства захвата выполнены с возможностью перемещения по вертикальным направляющим механизма перемещения;
- колеса пластин выполнены с возможностью перемещения по вертикальным направляющим механизма перемещения средства захвата.
Привод возвратно-поступательного движения П-образной жесткой рамы по поддону содержит два барабана, установленные у торцов поддона, с возможностью вращения вокруг вертикальных осей, на которые надет замкнутый поводок, скрепленный с П-образной жесткой рамой, при этом один из барабанов снабжен приводом вращения.
Привод возвратно-поступательного движения каретки по горизонтальным направляющим содержит два барабана, установленные на концах горизонтальных направляющих, с возможностью вращения вокруг вертикальных осей, на которые надет замкнутый поводок, скрепленный с поддоном каретки, при этом один из барабанов снабжен приводом вращения.
Привод возвратно-поступательного движения средства захвата по вертикальным направляющим содержит барабан, установленный на поддоне каретки с возможностью вращения вокруг горизонтальной оси, на барабан надет поводок, один конец которого закреплен на барабане, а другой на поддоне средства захвата, при этом барабан снабжен приводом вращения.
Заявленное техническое решение позволяет осуществить доступ, захват любого заданного изделия из всех находящихся в торговом автомате и переместить его к нише выдачи.
Совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигаемым техническим результатом. На основании изложенного можно заключить, что заявленное техническое решение является новым и обладает изобретательским уровнем, т.к. явным образом не следует из уровня техники и пригодно для промышленного применения.
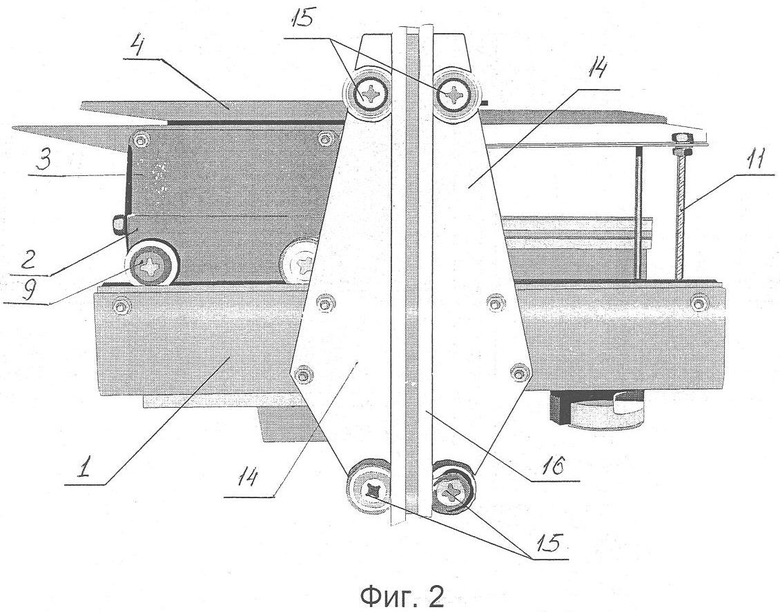
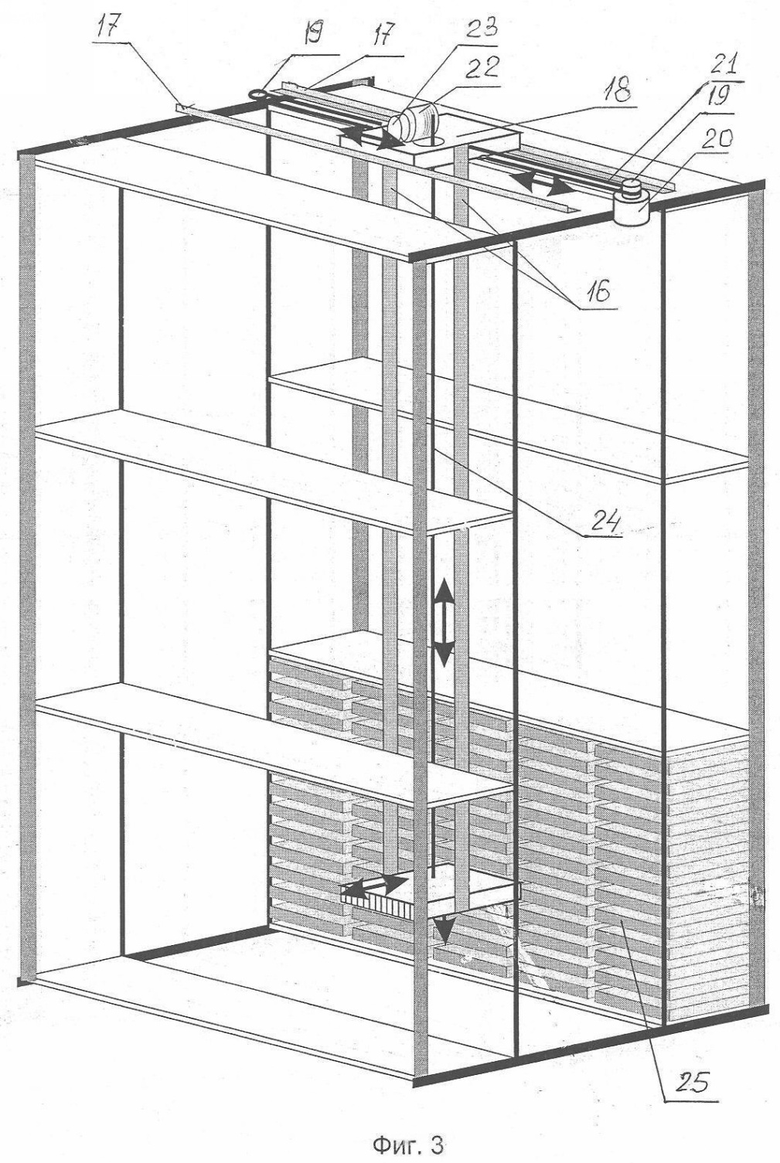
Сущность изобретения поясняется чертежами, где на фиг.1 изображено средство захвата товара в аксонометрии, на фиг.2 - средство захвата товара в аксонометрии, вид сбоку, на фиг.3 - схема размещения в торговом автомате механизма перемещения изделий, где:
1 - поддон средства захвата товара;
2 - П-образная жесткая рама;
3 - коромысла;
4 - захваты;
5 - поворотный фланец;
6 - механизм поворота;
7 - осевые стяжки;
8 - тяги;
9 - колеса П-образной жесткой рамы;
10 - направляющие, закрепленные на бортах поддона средства захвата товара;
11 - опорные скобы;
12 - барабаны привода средства захвата товара;
13 - поводок привода средства захвата товара;
14 - пластины;
15 - колеса пластин;
16 - вертикальные направляющие;
17 - горизонтальные направляющие;
18 - поддон катерки;
19 - барабаны привода поддона каретки;
20 - привод вращения каретки;
21 - поводок привода каретки;
22 - барабан привода средства захвата товара;
23 - привод вращения для вертикального перемещения средства захвата товара;
24 - поводок привода для вертикального перемещения средства захвата товара;
25 - товар.
Привод вращения барабанов средства захвата товара на чертеже не показан.
Поворотный фланец 5 снабжен механизмом поворота вокруг оси параллельной продольной оси П-образной жесткой рамы 2. Коромысла 3 выполнены в виде пластин с торцевыми отгибами. Торцевые отгибы, выполненные наружу, снабжены соосными отверстиями. Торцевые отгибы, выполненные внутрь, снабжены выступами с отверстием. Свободные концы коромысел жестко скреплены с захватами 4. Коромысло 3 скреплено с П-образной жесткой рамой 2 с возможностью шарнирного поворота вокруг оси, параллельной продольной оси П-образной жесткой рамы 2, для чего боковые элементы последней снабжены петлями, через которые и соосные отверстия наружных торцевых отгибов пропущены осевые стяжки 7. Каждое коромысло 3 связано с поворотным фланцем 5 посредством тяги 8, концы каждой из которых связаны с поворотным фланцем 5 и выступом внутреннего торцевого отгиба коромысла 3 посредством шарнира с осью вращения, параллельной продольной оси П-образной жесткой рамы 2. Боковые поверхности П-образной жесткой рамы 2 снабжены колесами 9, размещенными с возможностью перемещения в направляющих, закрепленных на бортах поддона 2. П-образная жесткая рама 2 снабжена приводом возвратно-поступательного движения по поддону 1, который содержит два барабана 12. Барабаны 12 установлены у торцов поддона 1, с возможностью вращения вокруг вертикальных осей. На барабаны 12 надет замкнутый поводок 13, скрепленный с П-образной жесткой рамой 2. Один из барабанов 12 снабжен приводом вращения. Длина захватов 4 вдоль продольной оси П-образной жесткой рамы 2 превышает ширину коромысла 3. С поддоном 1 скреплены П-образные опорные скобы 11, расположенные параллельно друг другу. Верхние элементы П-образных опорных скоб 11 размещены ниже захвата 4 в крайнем нижнем его положении и ориентированы вдоль продольной оси П-образной жесткой рамы 2. С поддоном 1 на его бортах с наружной стороны жестко скреплены пластины 14. Пластины 14 расположены параллельно друг другу и ориентированы вдоль вертикальной оси поддона 1. Пластины 14 размещены на равном расстоянии от торцов поддона 1, при этом высота пластин 14 превышает высоту П-образных опорных скоб 11. На наружных поверхностях пластин 14 установлены колеса 15, которые ориентированы вдоль вертикальной оси пластин 14. Механизм перемещения средства захвата содержит вертикальные направляющие 16, горизонтальные направляющие 17, размещенные в верхней части торгового автомата, и каретку, выполненную в виде поддона 18. На поддоне 18 каретки установлен привод вертикального перемещения средства захвата товара. С боковыми сторонами поддона 18 каретки жестко скреплены верхние части вертикальных направляющих 16, нижние части которых жестко скреплены между собой. Колеса 15 пластин средства захвата товара выполнены с возможностью перемещения по вертикальным направляющим 16 механизма перемещения. Поддон 18 каретки снабжен приводом для возвратно-поступательного движения по горизонтальным направляющим 17. Привод возвратно-поступательного движения поддона 18 каретки по горизонтальным направляющим 17 содержит два барабана 19, установленные на концах горизонтальных направляющих 17, с возможностью вращения вокруг вертикальных осей. На барабаны 19 надет замкнутый поводок 21, скрепленный с поддоном 18 каретки, при этом один из барабанов 19 снабжен приводом 20 вращения. Привод возвратно-поступательного движения средства захвата по вертикальным направляющим 16 содержит барабан 22, установленный на поддоне 18 каретки с возможностью вращения вокруг горизонтальной оси. На барабане 22 надет поводок 24. Один конец поводка 24 закреплен на барабане 22, а другой на поддоне 1 средства захвата (на чертеже не показано), при этом барабан 22 снабжен приводом 23 вращения.
Механизм перемещения изделий для торгового автомата работает следующим образом.
При эксплуатации, когда потребитель оплачивает выбранный товар и нажимает кнопку выбора, чтобы получить желаемое изделие, механизм перемещения товара осуществляет перемещение средства захвата до местоположения выбранного товара. Для этого по команде управления включается привод 20 горизонтального перемещения каретки и посредством поводка 21 и барабанов 19 перемещает поддон 18 каретки по горизонтальным направляющим 17 к местоположению выбранного товара 25. Так как вертикальные направляющие 16 жестко скреплены с поддоном 18 каретки, то и они перемещаются в горизонтальном направлении. Средство захвата товара соединено посредством колес 15 с вертикальными направляющими 16, следовательно, и оно также перемещается в горизонтальном направлении. Для перемещения средства захвата товара в вертикальном направлении по команде с механизма управления привод 23 вертикального перемещения средства захвата посредством барабана 22, поводка 24 и колес 15 пластин 14 перемещает поддон 1 средства захвата товара по вертикальным направляющим 16 до местоположения выбранного товара. Затем производится выемка и захват выбранного товара 25 средством захвата. Для чего привод вращения поддона 1 средства захвата товара посредством барабанов 12 и поводка 13 перемещает П-образную жесткую раму 2 с помощью колес 9 по направляющим 10 в направлении выбранного товара. Перемещение П-образной жесткой рамы 2 происходит до тех пор, пока захваты 4 не осуществят выемку выбранного товара 25 из ячейки хранения. Затем по команде механизма управления производится возвратное движение П-образной жесткой рамы 2 при помощи привода вращения поддона 1 с выбранным товаром 25, которое размещено между захватами 4. Движение П-образной рамы 2 осуществляется до середины поддона 1 средства захвата товара. Далее осуществляется перемещение поддона 1 средства захвата по вертикальным направляющим 16 до приемной ниши средства выдачи товара. По команде механизма управления механизм поворота (двигатель координаты R) 6 осуществляет поворот на некоторый угол, тем самым, изменяя положение поворотного фланца 5, а следовательно, и тяг 8. Тяги 8 в свою очередь изменяют положение коромысел 3 и захватов 4, которые жестко связаны с коромыслами 3. Вращение механизма поворота 6 против часовой стрелки приводит к высвобождению выбранного товара 25 из захватов 4. Выбранный товар 25 опускается на опорные скобы 11, т.к. верхние элементы скоб размещены ниже захвата 4 в крайнем нижнем его положении. Опорные скобы 11 являются столиком для временного удержания выбранного товара 25 в процессе перемещения средства захвата к нише выдачи товара. Затем происходит выгрузка выбранного товара 25 из средства выдачи товара в приемную нишу. Для чего по команде механизма управления осуществляют вращение механизма поворота 6 по часовой стрелке и через поворотный фланец 5 и тяги 8 осуществляют коромыслами 3 и захватами 4 захват товара 25. После чего осуществляют перемещение П-образной жесткой рамы 2. Для чего привод вращения поддона 1 посредством барабанов 12 и поводка 13 перемещает П-образную жесткую раму 2 с помощью колес 9 по направляющим 10 в направлении ниши выдачи товара. Перемещение П-образной жесткой рамы 2 происходит до тех пор, пока ее положение не достигнет крайней точки направляющих 12 поддона 1, тем самым товар будет перемещен в крайнее положение на П-образных опорных скобах 11. Затем производится выгрузка товара 25, аналогичная выгрузки товара из ячейки хранения, на П-образные скобы 11. После чего товар под действием своего веса скатывается с П-образных опорных скоб 11 в нишу выдачи товара, т.к. большая часть, по площади, товара 25 будет находиться вне П-образных опорных скоб 11. Затем по команде управления П-образная жесткая рама 2 приводится в исходное положение.
Заявленный механизм перемещения изделий для торгового автомата позволяет осуществить захват, выемку и перемещение выбранного изделия из любой ячейки хранения с минимумом механизмов перемещения.
Изобретение относится к монетным или подобным автоматам для выдачи отдельных изделий. Механизм перемещения изделий для торгового автомата содержит средство захвата товара и механизм перемещения средства захвата. Средство захвата товара содержит поддон, П-образную жесткую раму, коромысла, поворотный фланец, снабженный механизмом поворота. Коромысла выполнены в виде пластин с торцевыми отгибами. Коромысло скреплено с П-образной жесткой рамой с возможностью шарнирного поворота вокруг оси, параллельной продольной оси П-образной жесткой рамы. Поворотный фланец размещен с возможностью поворота вокруг оси, параллельной продольной оси П-образной жесткой рамы. Каждое коромысло связано с поворотным фланцем посредством тяги. Боковые поверхности П-образной жесткой рамы снабжены колесами, размещенными с возможностью перемещения в направляющих, закрепленных на бортах поддона. П-образная жесткая рама снабжена приводом возвратно-поступательного движения по поддону. Достигается осуществление доступа к любому выбранному изделию из всех находящихся в торговом автомате. 3 з.п. ф-лы, 3 ил.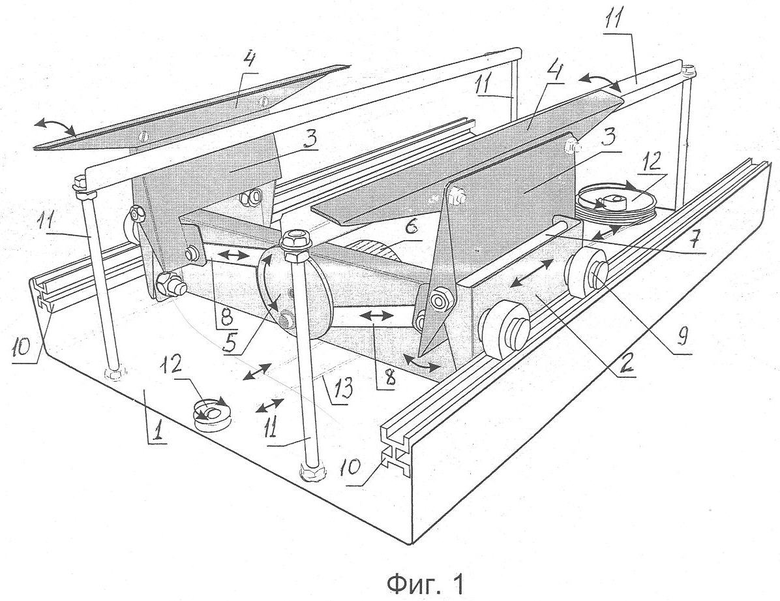
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ ДЛЯ ТОРГОВОГО АВТОМАТА | 1996 |
|
RU2117622C1 |
| Рельсовое стыковое соединение | 1928 |
|
SU13268A1 |
| Приспособление для вырывания щетины из свиных шкур | 1933 |
|
SU37249A1 |
| US 2003136794 A1, 24.07.2003 | |||
| US 2003028284 A1, 06.02.2003 | |||
| Машина для непрерывной разливки стали | 1949 |
|
SU111578A1 |

