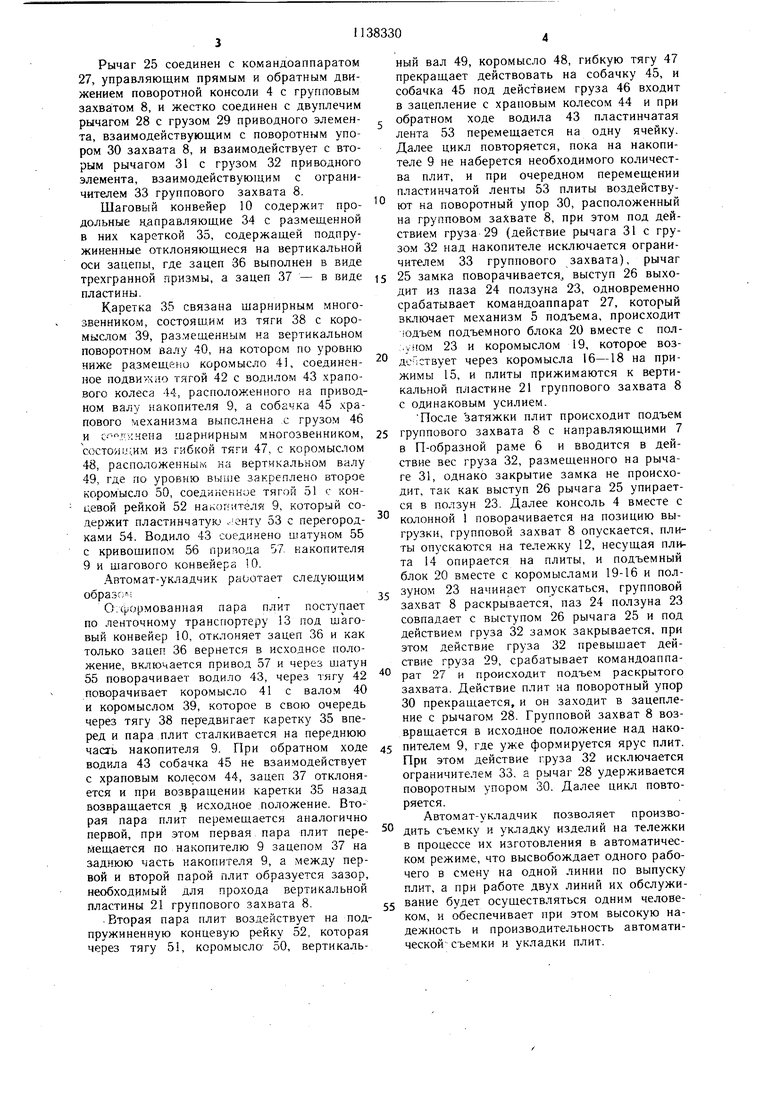
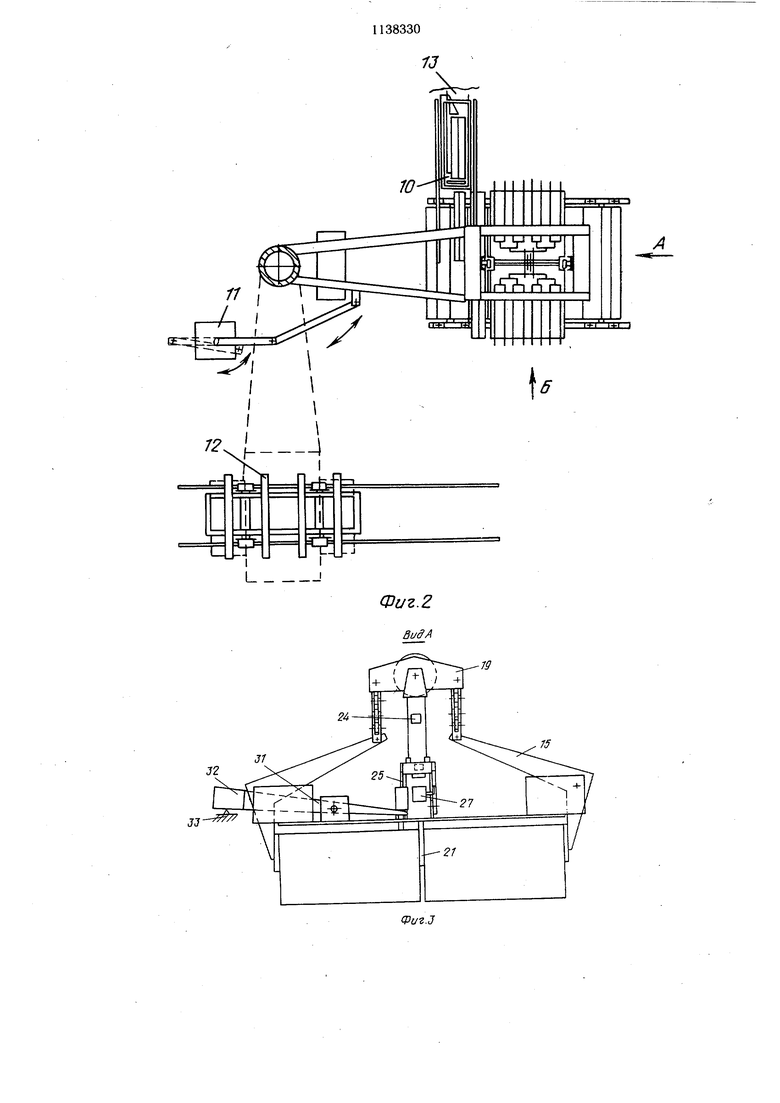
Изобретение относится к оборудованию для промышленности строительных материалов, в частности для укладки гипсовых плит на тележки, в контейнеры, на поддоны Известен автомат-укладчик плит, со, стояший из сталкивающего механизма, установленного с возможностью возвратнопоступательного движения, накопителя с ячейками, штабелировщика с групповым захватом, механизмами г одъема и поворота, электрического силового оборудования и аппаратуры управления. Ячейки накопителя и группового захвата образованы горизонтальными и вертикальными рядами роликов, при этом групповой захват штабелировшика выполнен поворотным, расположен над передаточной тележкой, и снабжен торцовым прижимом плит и подвижными стенками, а сталкиваюш,ий механизм выполнен в виде направляющих и поворотного подвижного рычага, при этом механизмы приводятся в движение гидроцилиндрами (1. Однако данный автомат-укладчик п.тит имеет низкую производительность и надежность вследствие большого количества гидро- и электроаппаратуры. Кроме того, примененный на автомате-укладчике плит групповой захват с торцовым зажимом плит не обеспечивает надежного удержания плит при отклонений их- размеров. Тележка-накопитель имеет возможность движения в двух направлениях, что ограничивает производительность, вследствие накладки процесса сталкивания на проце.сс накопления, операции зажима и подъема, а также перемещение и разворот не совмещены по времени и осуществляются разными приводами.- Наиболее близким техническим решением к предлагаемому является автоматукладчик плит, содержащий шаговый конвейер с поворотными зацепами, примыкающий к нему накопитель, выполненный в виде пластинчатого конвейера с ячейками для плит и храповым механизмом, и размещенный над накопителем штабелировщик, на раме которого закреплен групповой захват с замковым механизмом, выполненным в виде рычага, соединенного с приводным элементом 2. Однако известный автомат-укладчик плит не обеспечивает достаточной надежности захвата плит и имеет большую энергоемкость. Целью изобретения является повышение надежности и снижение энергоемкости. Поставленная цель достигается тем, что в автомате-укладчике плит, содержаш.ем шаговый конвейер с поворотными зацепами, примыкаюш.ий к нему накопитель, выполненный в виде пластинчатого конвейера С ячейками для плит и храповым механизмом, и размещенный над накопителем штабелировщик, на раме которого закреплен групповой захват с замковым механизмом, выполненным в виде рычага, соединенного с приводным элементом, захват снабжен поворотным упором с ограничителем, при этом на накопителе смонтирована концевая рейка, а приводной элемент выполнен в виде взаимосвязанных между собой двуплечих рычагов с грузами, причем один из рычагов соединен с рычагом замкового механизма и установлен с возможностью контакта с поворотным упором, а другой с ограничителем, шаговый конвейер и концевая рейка накопителя соединены с храповым механизмом накопителя посредством шарнирных многозвенников. На фиг. изображен автомат-укладчик, вид спере.ди; на фиг. 2 - то же, вид в плане; на фиг. 3 - вид А на фиг. 2 (групповой за.хват); на фиг. 4 - вид 5 на фиг. 2 (групповой захват); на фиг. 5 - шаговый конвейер, расположенный над накопителем, и шарнирные связи; на фиг. 6 - храповой механизм накопителя с приводом, ви.д сбоку. Автомат укладчик состоит из поворотной колонны 1, закрепленной в подшипниковых опорах 2 и 3 с закрепленной на ней жесткой консолью 4, на которой размещен механизм 5 подъема и П-образная рама 6 с перемеш.ающимся в ней по вертикальным направляющим 7 групповым захватом 8, размещенным над накопителем 9, и шагового конвейера 10. Консоль 4 поворачивается механизмом 11 поворота на позицию выгрузки тележки 12, а плиты подаются к устройству ленточнЬм транспортером 13. Групповой захват 8 состоит из несущей плиты 14, на которой подвижно закреплены торцовые прижимы 15, выполненные в виде дауплечих поворотных рычагов, соединенных с концами коромысел 16, середины которых соединены с концами коромысел 17, середины пос.тедних соединены с концами коромысел 18, соединенных с концами коромысла 9, размещенного на подъемном блоке 20, связанном посредством трособлочкой системы с механизмом 5 подъема, например, электросталью. Под несущей плитой 14 группового захвата и seeтcя вертикальная пластина 21, к которой прижимаются торцовые прижимы 15 плита. Замок гру:1пового захвата содержит закрепленный на несущей плите 14 стакан 22 с размещенным в нем ползуном 23 с пазом 24, закрепленным на подъемном блоке 20, и рычаге 25 с выступом 26 для взаимодействия с пазом 24 ползуна 23.
Рычаг 25 соединен с командоаппаратом 27, управляющим прямым и обратным движением поворотной консоли 4 с групповым захватом 8, и жестко соединен с двуплечим рычагом 28 с грузом 29 приводного элемента, взаимодействующим с поворотным упором 30 захвата 8, и взаимодействует с вторым рычагом 31 с грузом 32 приводного элемента, взаимодействующим с ограничителем 33 группового захвата 8.
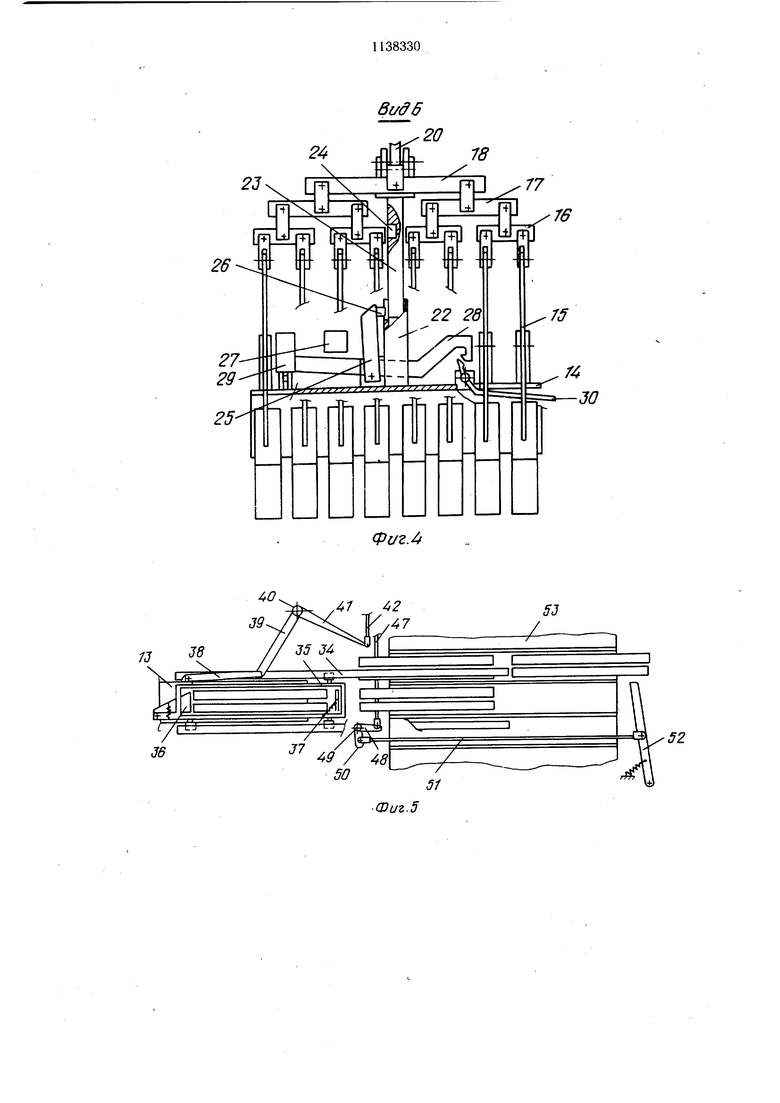
Шаговый конвейер 10 содержит продольные направляющие 34 с размещенной в них кареткой 35, содержащей подпружиненные отклоняющиеся на вертикальной оси зацепы, где зацеп 36 выполнен в виде трехгранной призмы, а зацеп 37 - в виде пластины.
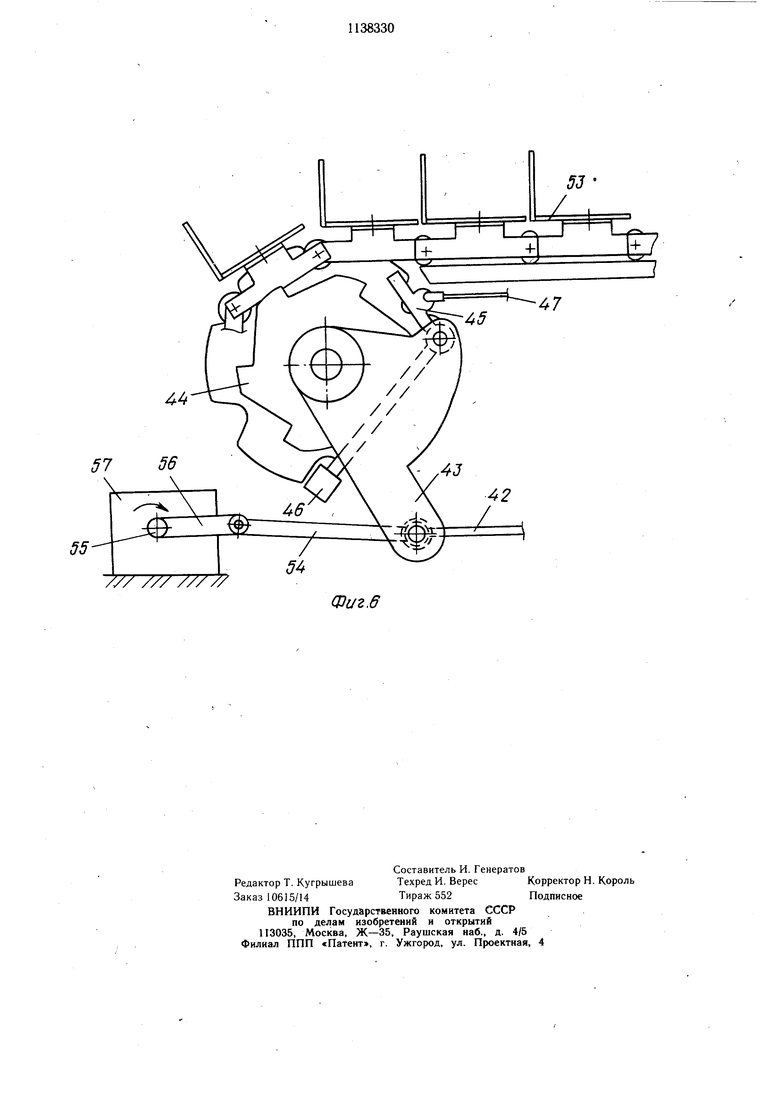
Каретка 35 связана шарнирным многозвенником, состоящим из тяги 38 с коромыслом 39, размещенным на вертикальном поворотном валу 40, на котором по уровню ниже размещено коромысло 41, соединенное подвижно тягой 42 с водилом 43 храпового колеса 44, расположенного на приводном валу накопителя 9, а собачка 45 храпового механизма выполнена ,с грузом 46 и с- --г -:нена шарнирным многозвенником, состоии:им из гибкой ТЯГИ 47, с коромыслом
48,расположенным ка вертикальном валу
49,где по уровню выше закреплено второе коромысло 50, соединенное тягой 51 с концезой рейкой 52 накопителя 9, который содержит пластинчатую .-онту 53 с перегородками 54. Водило 43 соединено шатуном 55 с кривощипом 56 привода 57 накопителя 9 и шагового конвейера 0.
Автомат-укладчик раоотает следующим oopasfii
Отформованная пара плит поступает по ленточному транспортеру 13 под шаговый конвейер 10, отклоняет зацеп 36 и как только зацеп 36 вернется в исходное положение, включается привод 57 и через шатун 55 поворачивает водило 43, через тягу 42 поворачивает коромысло 41 с валом 40 и коромыслом 39, которое в свою очередь через тягу 38 передвигает каретку 35 вперед и пара плит сталкивается на переднюю часть накопителя 9. При обратном ходе водила 43 собачка 45 не взаимодействует с храповым колесом 44, зацеп 37 отклоняется и при возвращении каретки 35 назад возвращается .§ исходное положение. Вторая пара плит перемещается аналогично первой, при этом первая пара плит перемещается по накопителю 9 зацепом 37 на заднюю часть накопителя 9, а между первой и второй парой плит образуется зазор, необходимый для прохода вертикальной пластины 21 группового захвата 8.
Вторая пара плит воз.аействует на подпружиненную концевую рейку 52, которая через тягу 51, коромысло- 50, вертикальный вал 49, коромысло 48, гибкую тягу 47 прекращает действовать на собачку 45, и собачка 45 под действием груза 46 входит в зацепление с храповым колесом 44 и при обратном ходе водила 43 пластинчатая лента 53 перемещается на одну ячейку. Далее цикл повторяется, пока на накопителе 9 не наберется необходимого количества плит, и при очередном перемещении пластинчатой ленты 53 плиты воздействуют на поворотный упор 30, расположенный на групповом захвате 8, при это.м под действием груза 29 (действие рычага 31 с грузом 32 над накопителе исключается ограничителем 33 группового захвата), рычаг
5 25 замка поворачивается выступ 26 выходит из паза 24 ползуна 23, одновременно срабатывает командоаппарат 27, который включает механизм 5 подъема, происходит юдъем подъемного блока 20 вместе с пол.уном 23 и коромыслом 19, которое воз дсПствует через коромысла 16-18 на прижимы 15, и плиты прижимаются к вертикальной пластине 21 группового захвата 8 с одинаковым усилием.
После затяжки плит происходит подъем
5 группового захвата 8 с направляющими 7 в П-образной раме 6 и вводится в действие вес груза 32, размещенного на рычаге 31, однако закрытие замка не происходит, так как выступ 26 рычага 25 упирается в ползун 23. Далее консоль 4 вместе с
п„ ;
колонной 1 поворачивается на позицию выгрузки, групповой захват 8 опускается, плиты опускаются на тележку 12, несущая плита 14 опирается на плиты, и подъемный блок 20 вместе с коромыслами 19-16 и ползуном 23 начинает опускаться, групповой захват 8 раскрывается, паз 24 ползуна 23 совпадает с выступом 26 рычага 25 и под действием груза 32 замок закрывается, при этом действие груза 32 превышает действие груза 29, срабатывает командоаппарат 27 и происходит подъем раскрытого захвата. Действие плит на поворотный упор 30 прекращается, и он заходит в зацепление с рычагом 28. Групповой захват 8 возвращается в исходное положение над накопителем 9, где уже формируется ярус плит. При этом действие груза 32 исключается ограничителем 33. а рычаг 28 удерживается поворотным упором 30. Далее цикл повторяется.
Автомат-укладчик позволяет произвоПU
дить съемку и укладку изделии на тележки в процессе их изготовления в автоматическом режиме, что высвобождает одного рабочего в смену на одной линии по выпуску плит, а при работе двух линий их обслуживание будет осуществляться одним человеком, и обеспечивает при этом высокую надежность и производительность автоматической съемки и укладки плит.
Фиг.г
ВиЗА
79
Bf/ff6
18 FD
Г6
Фиг.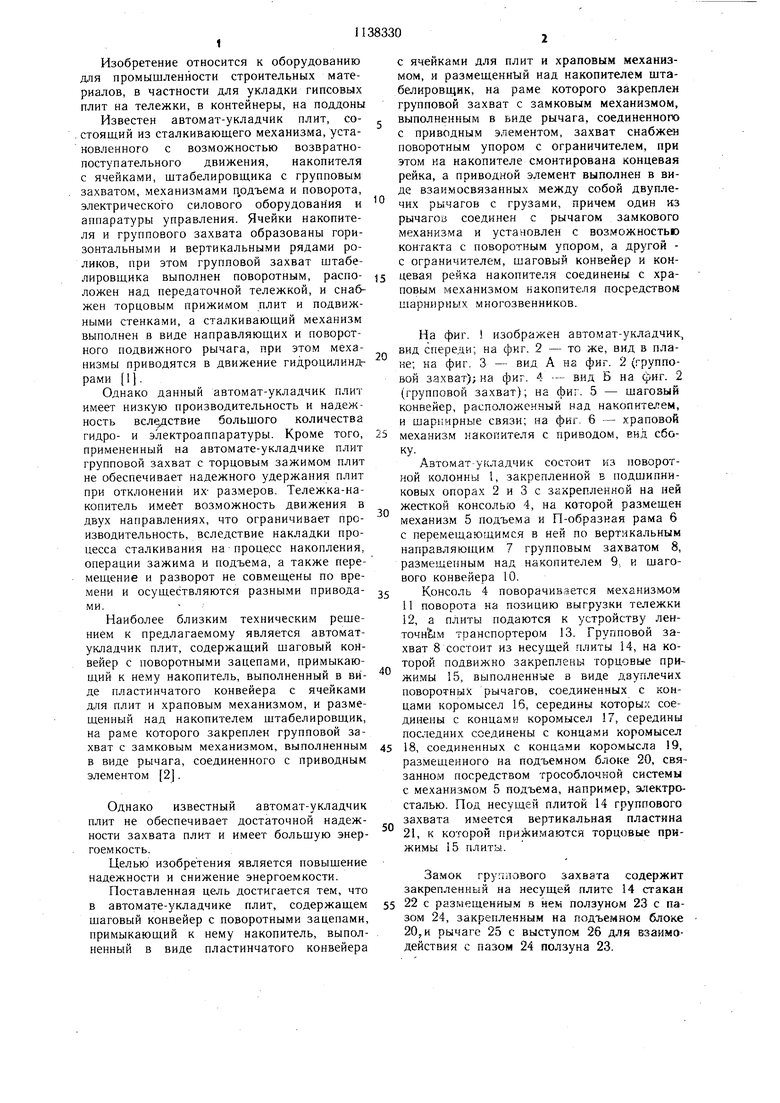
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат-укладчик плит | 1982 |
|
SU1079454A1 |
| Автоматизированный укладчик плит | 1974 |
|
SU607736A1 |
| Поточная линия для производства дренажных раструбных труб | 1983 |
|
SU1079456A1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| Поточная линия для производства керамических труб | 1977 |
|
SU737218A1 |
| Автомат для сборки радиаторов | 1982 |
|
SU1042944A1 |
| Устройство для переноса и укладки кирпича на печную вагонетку | 1976 |
|
SU745694A1 |
| АВТОМАТ ДЛЯ СБОРКИ РАДИАТОРОВ | 1973 |
|
SU370005A1 |
| АВТОМАТ-УКЛАДЧИК КИРПИЧА-СЫРЦА НА ПЕЧНУЮВАГОНЕТКУ | 1971 |
|
SU295730A1 |
АВТОМАТ-УКЛАДЧИК ПЛИТ, содержащий шаговый конвейер, с поворотными зацепами, примыкающий к нему накопитель, выполненный в виде пластинчатого к чвейера с ячейками для плит и храповым механизмом, и размещенный над накопителем щтабелировщик, на раме которого закреплен групповой захват с замковым механизмом, выполненным в виде рычага, соединенного с приводным элементом, отличающийся тем, что, с целью повышения надежности укладки плит и снижения энергоемкости, «групповой захват снабжен поворотным упором и ограничителем, при этом на накопителе смонтирована концевая рейка, а приводной элемент выполнен в виде взаимосвязанных между собой двуплечих рычагов с грузами, причем один из рычагов соединен с рычагом замкового механизма и установлен с возможностью контакта с поворотным упором, а другой с ограничителем, шаговый конвейер и концевая рейка накопителя соединены с храповым механизмом накопителя при помощи шарнирных многозвенников.
50
51
Фиг.5
////// ////7
Фиг.6
| I | |||
| Автоматизированный укладчик плит | 1974 |
|
SU607736A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3518442/29-33, кл | |||
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
