Изобретение относится к автоматизированным системам, а именно к устройствам управления электроприводами, и может быть использовано, в частности, в автоматизированных системах радиолокационной техники, а именно в автоматизированной системе управления приводом горизонтального вращения антенн корабельных РЛС.
Известно устройство наведения направленной антенны, которое содержит электропривод поворота антенны, датчик угла ее поворота, включающий в себя оптроны, блок управления, имеющий триггеры, блок торможения, элементы для обеспечения торможения (патент РФ № 2010288, кл. G05B 11/00, 1991 г.).
Известно устройство управления приводом горизонтального вращения в системе регулирования и контроля двигателя, содержащее блоки усилителей, блок источника питания, фрикционный электропривод, блок входных управляющих сигналов торможения, блок управления с выходом на исполнительный механизм (публикация № WO 97/16774, кл. G05B 11/01, 1997 г.).
Известно также устройство управления электроприводом, содержащее блок сигнала управления, блок усилителей, блок источника питания, фрикционный электропривод, блок управления с выходом на исполнительный механизм (патент РФ № 2263338, кл. G05B 11/14, 2004 г.).
Наиболее близким аналогом (прототипом) является система управления антенной радиолокационной станции, которая содержит привод антенны СВЧ, электродвигатель, датчик положения, коммутатор, блок источника питания, блок выходных сигналов управления частотой, блок усилителей, блок команды поворота антенны (патент РФ № 2024907, кл. G05B 11/01, 1991 г.).
Однако работа устройства недостаточно надежна, конструкция усложнена. Не решен вопрос управления торможением, а также остановкой вращающегося вала электродвигателя в требуемом определенном положении, поскольку устройство управления электроприводом не позволяет включить тормоз с упреждением.
Техническое решение, выбранное в качестве прототипа, имеет следующие недостатки: сложность устройства, невозможность начала торможения с упреждением и включение тормоза в требуемом положении. Кроме того, невозможно обеспечить режим измененной частоты вращения электропривода.
Задачей, на решение которой направлено предлагаемое изобретение, является создание устройства управления электроприводом, позволяющего обеспечить его упрощение, режим изменения частоты вращения электропривода, поступление импульса начала торможения с упреждением и возможность торможения в требуемом положении.
Техническими результатами при реализации изобретения, в частности, являются упрощение конструкции устройства управления электроприводом, обеспечение режима изменения частоты вращения электропривода, поступления импульса начала торможения с упреждением, обеспечение возможности торможения и фиксации в требуемом положении, исключение возможности возникновения механического удара, повышение надежности, уменьшение износа трущихся частей механизмов.
Влияние на достижение указанных технических результатов оказывают следующие существенные признаки. В устройстве управления электроприводом имеется блок выходных сигналов управления частотой вращения привода, блок выходного сигнала управления торможением, блок источника питания, блок установки начального состояния, блок управления режимами работы привода, блок выбора режимов работы привода, блок разрешения работы привода, блок гальванической развязки с преобразователем частоты, блок гальванической развязки с сигналами управления нулевого режима, блок усилителя мощности сигнала управления тормозом привода, блок формирования сигнала неисправности привода, блок формирования сигнала запуска привода, блок входных управляющих сигналов, блок входного сигнала от преобразователя частоты вращения привода, блок входного сигнала с датчика угла поворота антенны и блок отображения сигнала неисправности привода. Причем выход блока источника питания соединен с входом блока установки начального состояния, выход блока установки начального состояния соединен с первым входом блока управления режимами работы привода, выход блока формирования сигнала запуска привода соединен с вторым входом блока управления режимами работы привода, выход блока входного сигнала от преобразователя частоты вращения привода и выход блока входного сигнала с датчика угла поворота антенны соединены с первым и вторым входами соответственно блока гальванической развязки с сигналами управления нулевого режима, выход которого соединен с третьим входом блока управления режимами работы привода, а его выход соединен с первым входом блока разрешения работы привода и с входом блока усилителя мощности сигнала управления тормозом привода, выход с блока входных управляющих сигналов соединен с входом блока выбора режимов работы привода, при этом выход блока выбора режимов работы привода соединен со вторым входом блока разрешения работы привода, при этом выход блока разрешения работы привода соединен с входом блока гальванической развязки с преобразователем частоты и с первым входом блока формирования сигнала неисправности привода, при этом выход блока усилителя мощности сигнала управления тормозом привода соединен с входом блока выходного сигнала управления торможением и со вторым входом блока формирования сигнала неисправности привода, выход блока формирования сигнала неисправности привода соединен с входом блока отображения сигнала неисправности привода, а выход блока гальванической развязки с преобразователем частоты соединен с входом блока выходных сигналов управления частотой вращения привода.
Отличительными признаками от прототипа в предлагаемом устройстве управления электроприводом является наличие блока установки начального состояния, блока управления режимами работы привода, блока выбора режимов работы привода, блока разрешения работы привода, блока гальванической развязки с преобразователем частоты, блока гальванической развязки с сигналами управления нулевого режима, блока усиления мощности сигнала управления тормозом привода, блока формирования сигнала неисправности привода, блока формирования сигнала запуска привода, блока входных управляющих сигналов, блока входного сигнала от преобразователя частоты вращения привода, блока входного сигнала с датчика угла поворота антенны, блока отображения сигнала неисправности привода, а также наличие вышеприведенных связей между элементами функциональной схемы устройства управления электроприводом.
На чертеже представлена функциональная схема устройства управления электроприводом.
Устройство управления электроприводом содержит блок 1 установки начального состояния, блок 2 управления режимами работы привода, блок 3 выбора режимов работы привода, блок 4 разрешения работы привода, блок 5 гальванической развязки с преобразователем частоты, блок 6 гальванической развязки с сигналами управления нулевого режима, блок 7 усилителя мощности сигнала управления тормозом привода, блок 8 формирования сигнала неисправности привода, блок 9 формирования сигнала запуска привода, блок 10 источника питания, блок 11 входных управляющих сигналов, блок 12 входного сигнала от преобразователя частоты вращения привода, блок 13 входного сигнала с датчика угла поворота антенны, блок 14 выходных сигналов управления частотой вращения привода, блок 15 выходного сигнала управления торможением, блок 16 отображения сигнала неисправности привода.
Выход блока 10 источника питания соединен с входом блока 1 установки начального состояния. Выход с блока 1 установки начального состояния соединен с первым входом блока 2 управления режимами работы привода, а выход блока 9 формирования сигнала запуска привода соединен со вторым входом блока 2 управления режимами работы привода. Выход блока 13 входного сигнала с датчика угла поворота антенны и выход с блока 12 входного сигнала от преобразователя частоты вращения привода соединены с первым и вторым входами соответственно блока 6 гальванической развязки с сигналами управления нулевого режима. Выход блока 6 гальванической развязки с сигналами управления нулевого режима соединен с третьим входом блока 2 управления режимами работы привода. Выход блока 2 управления режимами работы привода соединен с первым входом блока 4 разрешения работы привода и с входом блока 7 усилителя мощности сигнала управления тормозом привода. Выход блока 11 входных управляющих сигналов соединен с входом блока 3 выбора режимов работы привода. Выход блока 3 выбора режимов работы привода соединен с вторым входом блока 4 разрешения работы привода. Выход блока 4 разрешения работы привода соединен с входом блока 5 гальванической развязки с преобразователем частоты и с первым входом блока 8 формирования сигнала неисправности привода. Выход блока 7 усилителя мощности сигнала управления тормозом привода соединен с блоком 15 выходного сигнала управления торможением и со вторым входом блока 8 формирования сигнала неисправности привода. Выход блока 8 формирования сигнала неисправности привода соединен с входом блока 16 отображения сигнала неисправности привода. Выход блока 5 гальванической развязки с преобразователем частоты соединен с входом блока 14 выходных сигналов управления частотой вращения привода.
В устройстве управления электроприводом предусмотрены следующие особенности последовательности соединения блоков. Блок 1 установки начального состояния устройства соединен с блоком 10 источника питания для подачи на него напряжения +5В. Блок 3 выбора режимов работы привода соединен с блоком 11 входных управляющих сигналов для их приема. В примере исполнения входные управляющие сигналы могут быть обозначены так: один как частота вращения «6», другой как частота вращения «12», а третий сигнал как выход в исходное состояние «0-КУ», причем сигнал «0-КУ» обозначает сигнал нулевого режима курсового угла корабля. Блок 11 входных управляющих сигналов может попеременно выдавать эти управляющие сигналы «6», «12», «0-КУ». Блок 6 гальванической развязки с сигналами управления нулевого режима осуществляет гальваническую развязку с сигналами управления «0-КУ» (нулевого режима). Вывод блока 3 выбора режимов работы привода, на который попеременно могут поступать сигналы «6», «12», «0-КУ», соединен с первым входом блока 4 разрешения работы привода. Блок 12 входного сигнала от преобразователя частоты вращения привода и блок 13 входного сигнала с датчика угла поворота антенны соединены с блоком 6 гальванической развязки с сигналами управления нулевого режима. В примере исполнения блок 12 входного сигнала от преобразователя частоты вращения привода предназначен для обеспечения передачи входного сигнала пониженной частоты. Входной сигнал пониженной частоты в примере исполнения может быть обозначен как «fп». В примере исполнения блок 13 входного сигнала с датчика угла поворота антенны предназначен для обеспечения входного сигнала импульса начала торможения, который в примере исполнения может быть обозначен как «НОС». Блок 13 входного сигнала с датчика угла поворота антенны может передавать входные сигналы «НОС». Блок 12 входного сигнала от преобразователя частоты вращения привода может передавать входные сигналы «fп».
Устройство управления приводом горизонтального вращения работает следующим образом.
Блок 1 установки начального состояния вырабатывает отрицательный (инверсный) импульс при поступлении на его вход напряжения питания +5В с выхода блока 10 источника питания. При поступлении импульса начальной установки на вход блока 2 управления режимами работы привода с выхода блока 1 установки начального состояния происходит запрет вращения электропривода и переход в заторможенное состояние. При отсутствии поступления импульса начальной установки и наличия импульса запуска от блока 9 формирования сигнала запуска привода блок 2 управления режимами работы привода переходит в состояние разрешения вращения двигателя электропривода и в расторможенное состояние тормоза электропривода. Блок 11 входных управляющих сигналов попеременно выдает управляющие сигналы «6», «12», «0-КУ». С выхода блока 11 входных управляющих сигналов управляющие сигналы «6», «12», «0-КУ» подаются на вход блока 3 выбора режимов работы привода. Блок 3 выбора режимов работы привода принимает один из управляющих сигналов «0-КУ», «6», «12». Блок 6 гальванической развязки с сигналами управления нулевого режима осуществляет гальваническую развязку с входным сигналом нулевого режима курсового угла корабля. С выхода блока 12 входного сигнала от преобразователя частоты вращения привода передается входной сигнал пониженной частоты «fп» на первый вход блока 6 гальванической развязки с сигналами управления нулевого режима, то есть передается сигнал изменения частоты вращения электропривода. С блока 13 входного сигнала с датчика угла поворота антенны передается входной сигнал импульса начала торможения «НОС» на второй вход блока 6 гальванической развязки с сигналами управления нулевого режима, то есть передается сигнал положения остановки корабельной антенны при окончании ее горизонтального вращения по отношению к носу корабля. Блок 6 гальванической развязки с сигналами управления нулевого режима принимает сигнал «fп» с блока 12 входного сигнала от преобразователя частоты вращения привода и сигнал «НОС» с блока 13 входного сигнала с датчика угла поворота антенны. Сигнал «НОС» выполняет функцию импульса начала торможения и поступает с некоторым упреждением начала торможения относительного истинного нулевого режима, то есть углового положения сигнала «0-КУ». Выходные сигналы с блока 6 гальванической развязки с сигналами управления нулевого режима поступают на третий вход блока 2 управления режимами работы привода. В случае совпадения во времени сигналов «fп» и «НОС» блок 4 разрешения работы привода выдает сигнал остановки для преобразователя частоты, а блок 7 усилителя мощности сигнала управления тормозом привода выдает сигнал торможения. При отсутствии управляющего сигнала «0-КУ» на вход блока 3 выбора режимов работы привода проходит один из входных сигналов «6» или «12». При наличии сигнала «0-КУ» на входе блока 3 выбора режимов работы привода проходит именно этот сигнал. В зависимости от выходного сигнала блока 2 управления режимами работы привода блок 4 разрешения работы привода может либо пропускать управляющий сигнал «6», «12», «0-КУ» на свой выход, либо выдавать сигнал логической единицы. При этом блок 5 гальванической развязки с преобразователем частоты непосредственно воздействуют на преобразователь частоты, вызывая соответствующее изменение частоты вращения двигателя электропривода. Так как преобразователь частоты является электронным устройством с временем реакции порядка 1 мкс, а тормоз привода - электромеханическим устройством с временем реакции порядка 0,1 с, то отключение двигателя произойдет практически мгновенно, а торможение антенны произойдет на свободном выбеге двигателя. При наличии тока на выходе блока 7 усилителя мощности сигнала управления тормозом привода тормоз находится в расторможенном состоянии, а при отсутствии - в заторможенном. Блок 8 формирования сигнала неисправности привода анализирует выходные сигналы блока 4 разрешения работы привода и блока 7 усилителя мощности сигнала управления тормозом привода. При возникновении ситуации, когда блок 4 разрешения работы привода выдает сигнал на вращение двигателя электропривода, а тормоз находится в заторможенном состоянии, блок 8 формирования сигнала неисправности привода выдает сигнал неисправности в устройстве.
Прием команд и информации в устройстве управления электроприводом осуществляется следующим образом. Блок 10 источника питания подает на блок 1 установки начального состояния напряжения +5В. Через выход блока 1 установки начального состояния осуществляется передача сигнала на первый вход блока 2 управления режимами работы привода. Через выход блока 9 формирования сигнала запуска привода осуществляется передача сигнала на второй вход блока 2 управления режимами работы привода. Через выход блока 13 входного сигнала с датчика угла поворота антенны и через выход 12 входного сигнала с преобразователя частоты вращения привода осуществляется передача сигнала на первый и второй входы соответственно блока 6 гальванической развязки с сигналами управления нулевого режима. Через выход блока 6 гальванической развязки с сигналами управления нулевого режима осуществляется передача сигнала на третий вход блока 2 управления режима работы привода. Через выход блока 2 осуществляется передача сигнала на блок 4 разрешения работы привода и на блок 7 усилителя мощности сигнала управления тормозом привода. Через выход блока 3 выбора режимов работы привода, на входы которого попеременно могут поступать управляющие сигналы «6», «12», «0-КУ», осуществляется передача одного из сигналов на блок 4 разрешения работы привода. Через выход блока 4 разрешения работы привода осуществляется передача сигнала на блок 5 гальванической развязки с преобразователем частоты и на первый вход блока 8 формирования сигнала неисправности привода. Управляющий сигнал «НОС» выполняет функцию импульса начала торможения, поступая с некоторым упреждением относительного истинного углового положения «0-КУ», и поэтому выходной сигнал блока 6 гальванической развязки с сигналами управления режима «0-КУ» поступает преобразованным на вход блока 2 управления режимами работы привода. В случае совпадения во времени управляющих сигналов «fп» и «HOC» блок 4 разрешения работы привода выдает сигнал остановки для преобразователя частоты, а блок 7 усилителя мощности сигнала управления тормозом привода выдает сигнал торможения. Блок 5 гальванической развязки с преобразователем частоты через блок 14 выходных сигналов управления частотой вращения привода передает на электропривод изменение частоты вращения двигателя привода.
Таким образом, устройство управления электроприводом обеспечивает включение, выключение двигателя привода, изменение частоты вращения, торможение и расторможение двигателя, остановку электропривода с пониженной частотой вращения и нулевым моментом на валу двигателя в требуемом положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ ТЯГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ ТЕПЛОВОЗА | 1995 |
|
RU2076810C1 |
| Электропривод переменного тока | 1987 |
|
SU1517108A1 |
| Электропривод переменного тока | 1989 |
|
SU1676057A1 |
| СИСТЕМА УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ ЭЛЕКТРОПРИВОДОМ ПОГРУЖНОГО НАСОСА | 2006 |
|
RU2334365C2 |
| Устройство для управления торможением частотно-регулируемого электропривода | 1984 |
|
SU1236593A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1990 |
|
SU1777225A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| Электропривод переменного тока с питанием от однофазного источника напряжения | 1984 |
|
SU1328921A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| Микроконтроллер регулировки расхода охлаждающей жидкости солнечной энергетической установки | 2023 |
|
RU2810876C1 |
Изобретение относится к автоматизированным системам и может быть использовано, в частности, в автоматизированной системе управления приводом горизонтального вращения антенны корабельной РЛС. Технический результат - обеспечение торможения с упреждением для останова в заданном положении. Устройство содержит блок выходных сигналов управления частотой вращения привода, блок выходного сигнала управления торможением, блок источника питания, блок формирования сигнала неисправности привода, блок усилителя мощности сигнала управления тормозом привода, блок отображения сигнала неисправности привода и блоки, предназначенные для остановки антенны на низкой частоте вращения в заданном и нулевом положении, для изменения частоты вращения, для торможения и расторможения. Эти блоки устройства и связи между ними обеспечивают решение задачи по управлению электроприводом путем изменения частоты вращения и торможения для остановки корабельной антенны в заданном и нулевом положении. 1 ил.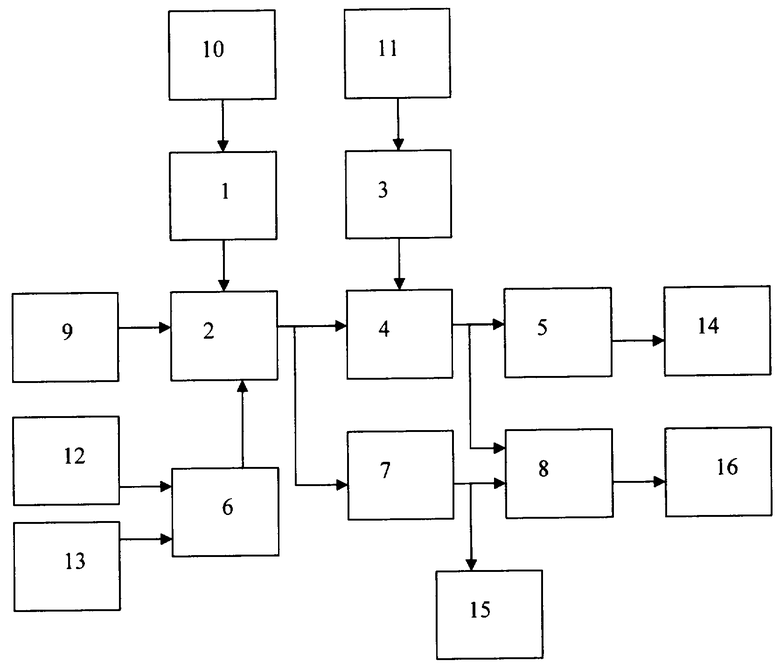
Устройство управления электроприводом, включающее в себя блок выходных сигналов управления частотой вращения привода, блок выходного сигнала управления торможением и блок источника питания, отличающееся тем, что оно снабжено блоком установки начального состояния, блоком управления режимами работы привода, блоком выбора режимов работы привода, блоком разрешения работы привода, блоком гальванической развязки с преобразователем частоты, блоком гальванической развязки с сигналами управления нулевого режима, блоком усилителя мощности сигнала управления тормозом привода, блоком формирования сигнала неисправности привода, блоком формирования сигнала запуска привода, блоком входных управляющих сигналов, блоком входного сигнала от преобразователя частоты вращения привода, блоком входного сигнала с датчика угла поворота антенны и блоком отображения сигнала неисправности привода, при этом блок управления режимами работы привода выполнен с возможностью перехода в состояние разрешения вращения двигателя привода и расторможенного состояния тормоза привода и с возможностью перехода в состояние запрета вращения двигателя привода и заторможенного состояния тормоза, блок разрешения работы привода выполнен с возможностью передачи команды на управление в выбранном режиме, либо сигнала отключения, блок гальванической развязки с сигналами управления нулевого режима выполнен с возможностью анализа принимаемого сигнала с блока входного сигнала от преобразователя частоты вращения привода и сигнала с блока входного сигнала с датчика угла поворота антенны, выполняющего функцию сигнала импульса начала торможения, поступающего с упреждением относительно истинного углового положения, для передачи сигнала останова на блок разрешения работы привода и на блок усилителя мощности сигнала управления тормозом привода в случае совпадения во времени сигналов с блока входного сигнала от преобразователя частоты вращения привода и сигнала с блока входного сигнала с датчика угла поворота антенны, блок формирования сигнала неисправности привода выполнен с возможностью анализа выходных сигналов блока разрешения работы привода и блока усилителя мощности сигнала управления тормозом привода для получения сигнала неисправности привода при поступлении сигнала на вращение двигателя привода с блока разрешения работы привода в случае получения сигнала с блока усилителя мощности сигнала управления тормозом привода о том, что тормоз находится в заторможенном состоянии, причем выход блока источника питания подключен к входу блока установки начального состояния для выработки инверсионного импульса, выход блока установки начального состояния соединен с первым входом блока управления режимами работы привода, выход блока формирования сигнала запуска привода соединен с вторым входом блока управления режимами работы привода, для передачи сигнала от преобразователя частоты вращения привода и сигнала от внешнего устройства обработки датчика угла поворота антенны, выполняющего функцию импульса начала торможения, выход блока входного сигнала от преобразователя частоты вращения привода и выход блока входного сигнала с датчика угла поворота антенны соединены с первым и вторым входами соответственно блока гальванической развязки с сигналами управления нулевого режима, выход которого соединен с третьим входом блока управления режимами работы привода для передачи состояния запрета вращения двигателя и создания заторможенного состояния тормоза, а выход блока управления режимами работы привода соединен с первым входом блока разрешения работы привода и с входом блока усилителя мощности сигнала управления тормозом привода для передачи сигнала состояния разрешения вращения двигателя и расторможенного состояния тормоза привода, при этом выход блока входных управляющих сигналов соединен с входом блока выбора режимов работы привода, а выход блока выбора режимов работы привода для передачи указания на выбранный режим работы соединен со вторым входом блока разрешения работы привода, выход блока разрешения работы привода соединен с входом блока гальванической развязки с преобразователем частоты и с первым входом блока формирования сигнала неисправности привода для передачи состояния разрешения работы двигателя в выбранном режиме либо передачи сигнала запрета вращения двигателя, при этом выход блока усилителя мощности сигнала управления тормозом привода соединен с входом блока выходного сигнала управления торможением и для сбора общей информации о неисправности привода с вторым входом блока формирования сигнала неисправности привода, выход блока формирования сигнала неисправности привода соединен с входом блока отображения сигнала неисправности привода, а выход блока гальванической развязки с преобразователем частоты соединен с входом блока выходных сигналов управления частотой вращения привода.
| СИСТЕМА УПРАВЛЕНИЯ АНТЕННОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1991 |
|
RU2024907C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ФРИКЦИОННЫМ ЭЛЕКТРОПРИВОДОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2263338C1 |
| УСТРОЙСТВО НАВЕДЕНИЯ НАПРАВЛЕННОЙ АНТЕННЫ | 1991 |
|
RU2010288C1 |
| Система управления | 1976 |
|
SU714350A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ ПРИВОДА | 2004 |
|
RU2271030C2 |
| WO 9716774 A1, 09.05.1997 | |||
| US 5270622 A, 14.12.1993. | |||

