Изобретение относится к автоматизированным системам и может быть использовано в бортовых системах управления летательными аппаратами, в которых в качестве рулевых приводов используются фрикционные электроприводы.
Известно управляющее устройство следящего электропривода, содержащее сумматор, элементы «И», регистры, усилитель, счетчик и блок обратной связи [1].
Недостатком этого устройства является невысокая статическая и динамическая точность и чувствительность к разбросам передаточных отношений редукторов.
Наиболее близким к предлагаемому изобретению является устройство управления фрикционным электроприводом летательного аппарата, содержащее задатчик сигнала управления, последовательно соединенные первый элемент вычитания и инерционный фильтр, последовательно соединенные исполнительное устройство и исполнительный механизм, выход которого соединен с объектом управления и через датчик сигнала угла отклонения - со входом первого элемента вычитания, а выход исполнительного устройства соединен со входом датчика сигнала скорости отклонения [2].
Недостатками известного устройства являются ограниченные функциональные возможности и невысокая точность управления.
Решаемой в предложенном устройстве управления технической задачей является расширение функциональных возможностей и повышение точности управления.
Предложенным построением устройства управления достигается функциональная возможность компенсации (инвариантность) чувствительности точности управления к допускам на передаточные соотношения в редукторе привода, а также повышение статической и динамической точности.
Указанный технический результат достигается тем, что в известное устройство управления фрикционным электроприводом летательного аппарата, содержащее задатчик сигнала управления, последовательно соединенные первый элемент вычитания и инерционный фильтр, последовательно соединенные исполнительное устройство и исполнительный механизм, выход которого соединен с объектом управления и через датчик сигнала угла отклонения - со входом первого элемента вычитания, а выход исполнительного устройства соединен со входом датчика сигнала скорости отклонения, дополнительно введены первый и второй усилители, ограничитель сигнала, второй элемент вычитания и инерционный усилитель, причем выход первого усилителя через ограничитель сигнала соединен со вторым входом первого элемента вычитания, выход второго усилителя через второй элемент вычитания соединен со входом исполнительного устройства, выход инерционного усилителя соединен со вторым входом второго элемента вычитания, а входы первого, второго и инерционного усилителей подключены соответственно к выходам задатчика сигнала управления, инерционного фильтра и датчика сигнала скорости отклонения.
На чертеже представлена структурная схема устройства управления фрикционным электроприводом.
Устройство управления фрикционным электроприводом летательного аппарата содержит последовательно соединенные задатчик сигнала управления 1 (ЗСУ), первый усилитель 2 (1 У) и ограничитель сигнала 3 (ОС), последовательно соединенные первый элемент вычитания 4 (1 ЭВ), инерционный фильтр 5 (ИФ), второй усилитель 6 (2 У), второй элемент вычитания 7 (2 ЭВ), исполнительное устройство 8 (ИУ) и исполнительный механизм 9 (ИМ), выход которого соединен с объектом управления (на чертеже не показан) и через датчик сигнала угла отклонения 10 (ДСУО) - со входом первого элемента вычитания 4, второй вход которого подключен к выходу ограничителя сигнала 3. Выход исполнительного устройства 8 через последовательно соединенные датчик сигнала скорости отклонения 11 (ДССО) и инерционный усилитель 12 (ИУ) соединен со вторым входом второго элемента вычитания 7.
Устройство управления фрикционным электроприводом работает следующим образом.
Задающим сигналом для работы электропривода является сигнал σзад., формируемый задатчиком сигнала управления 1. Сигнал σзад. поступает на первый усилитель 2, с выхода которого снимается сигнал σзад.ус.:

где  - коэффициент усиления первого усилителя 2.
- коэффициент усиления первого усилителя 2.
Введение блока 2 позволяет подобрать коэффициент с точки зрения обеспечения компенсации погрешностей передаточных соотношений редуктора привода.
Сигнал σзад.ус. с первого усилителя 2 поступает на ограничитель сигнала 3, на выходе которого формируется сигнал  :
:

Введение ограничителя сигнала 3 позволяет достаточно точно соотнести предельные уровни отрабатываемых сигналов с уровнями отклонений рулевого привода δ. При этом величина максимального значения σmax ограничения выбирается также с учетом необходимой компенсации погрешностей передаточных отношений привода.
Сформированный сигнал является непосредственно задающим сигналом для привода. А именно. Он поступает на второй вход первого элемента вычитания 4, на первый вход которого поступает сигнал обратной связи по положению σδ от датчика сигнала угла отклонения 10.
Сигнал рассогласования Δσ с блока 4:

поступает на инерционный фильтр 5 для отфильтровывания от флуктуационных составляющих, препятствующих качественной работе контура привода. Передаточная функция инерционного фильтра 5 имеет вид:
где Т - постоянная времени.
Сигнал U1 с выхода фильтра 5 поступает на второй усилитель 6. С его выхода сигнал U2:

где  - коэффициент усиления второго усилителя 6 - поступает на второй элемент вычитания 7. При этом выбор коэффициента производится с точки зрения обеспечения статической точности привода. Действительно, работа фрикционного электропривода по включению исполнительного устройства 8 носит релейный характер с зоной нечувствительности. Пусть величина этой зоны равна ϕ0. При заданной статической точности Δст. по рассогласованию Δσ имеем соотношение:
- коэффициент усиления второго усилителя 6 - поступает на второй элемент вычитания 7. При этом выбор коэффициента производится с точки зрения обеспечения статической точности привода. Действительно, работа фрикционного электропривода по включению исполнительного устройства 8 носит релейный характер с зоной нечувствительности. Пусть величина этой зоны равна ϕ0. При заданной статической точности Δст. по рассогласованию Δσ имеем соотношение:

откуда 
Во втором элементе вычитания 7 формируется сигнал Uупр.:

где σс - сигнал скоростной обратной связи, формируемый инерционным усилителем 12 датчика сигнала скорости отклонения 11 привода.
Передаточная функция инерционного усилителя 12 имеет вид:
где Киу и Тиу - соответственно коэффициент усиления и постоянная времени, определяющие качество динамики процесса отработки контуром привода задающих воздействий.
Исполнительное устройство 8 привода формирует скоростную характеристику:

Исполнительный механизм 9 отклонения руля рулевого привода отклоняет руль, т.е.
Все блоки устройства управления являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники.
Таким образом, предложенное устройство позволяет расширить функциональные возможности управления фрикционным электроприводом и повысить качество управления в целом.
Источники информации
1. А.с. СССР №800960, кл. G 05 B 11/14, 1981 г.
2. М.У.Зеликин, А.М.Пучков, В.Г.Стеблецов, А.С.Сыров. Приводы систем автоматики и управления полетом летательных аппаратов. Дефицит управления, энергетика, расчет параметров, М., МАИ, 1997 г., с.22-33.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РУЛЕВЫМ ПРИВОДОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2681823C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ СИГНАЛОВ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2238582C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339990C1 |
| Способ формирования многофункционального сигнала стабилизации углового положения летательного аппарата и устройство для его осуществления | 2016 |
|
RU2631718C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПРОДОЛЬНО-БАЛАНСИРОВОЧНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2394263C1 |
| ДВУХКАНАЛЬНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2532720C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата | 2015 |
|
RU2611459C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
Изобретение относится к автоматизированным системам и может быть использовано в бортовых системах управления летательными аппаратами, в которых в качестве рулевых приводов используются фрикционные электроприводы. Техническим результатом является расширение функциональных возможностей и повышение точности управления. Устройство содержит задатчик сигнала управления, первый и второй усилители, ограничитель сигнала, первый и второй элементы вычитания, инерционный фильтр, исполнительное устройство, исполнительный механизм, датчик сигнала угла отклонения, датчик сигнала скорости отклонения и инерционный усилитель. 1 ил.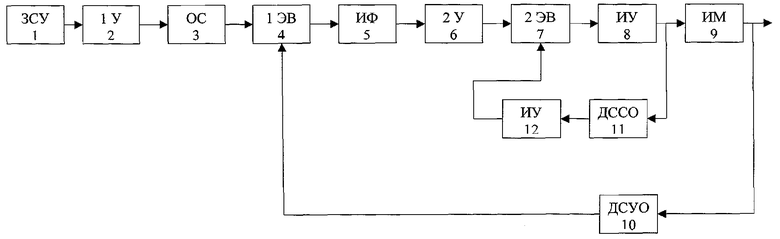
Устройство управления фрикционным электроприводом летательного аппарата, содержащее задатчик сигнала управления, последовательно соединенные первый элемент вычитания и инерционный фильтр, последовательно соединенные исполнительное устройство и исполнительный механизм, выход которого соединен с объектом управления и через датчик сигнала угла отклонения - со входом первого элемента вычитания, а выход исполнительного устройства соединен со входом датчика сигнала скорости отклонения, отличающееся тем, что в него введены первый и второй усилители, ограничитель сигнала, второй элемент вычитания и инерционный усилитель, причем выход первого усилителя через ограничитель сигнала соединен со вторым входом первого элемента вычитания, выход второго усилителя через второй элемент вычитания соединен со входом исполнительного устройства, выход инерционного усилителя соединен со вторым входом второго элемента вычитания, а входы первого, второго и инерционного усилителей подключены соответственно к выходам задатчика сигнала управления, инерционного фильтра и датчика сигнала скорости отклонения.
| М.У.ЗЕЛИКИН, А.М.ПУЧКОВ, В.Г.СТЕБЛЕЦОВ, А.С.СЫРОВ | |||
| Приводы систем автоматики и управления полетом летательных аппаратов | |||
| Дефицит управления, энергетика, расчет параметров | |||
| М.: МАИ, 1997, с.22-33 | |||
| СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2145724C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2117324C1 |
| Цифровой следящий электропривод | 1979 |
|
SU800960A1 |
| SU 1693589 А2, 23.11.1991 | |||
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ БОЕПРИПАС | 1999 |
|
RU2146801C1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

