Заявляемые технические решения относятся к области радиолокации и могут быть использованы в обзорных одноканальных радиолокационных станциях (РЛС) с фазированными антенными решетками (ФАР) для измерения угловых координат объектов.
Известным способом измерения угловых координат объекта является способ, включающий излучение зондирующих сигналов, прием отраженных от объекта сигналов, измерение амплитуд принятых сигналов и угловых координат луча антенны РЛС, соответствующих принятым сигналам, формирование двумерного углового пакета принятых сигналов, вычисление угловой координаты объекта (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана. М., Сов. радио, 1970, стр.284). Угловую координату объекта вычисляют при этом как среднее арифметическое угловых положений луча в начале и в конце двумерного углового пакета принятых сигналов по соответствующей угловой координате.
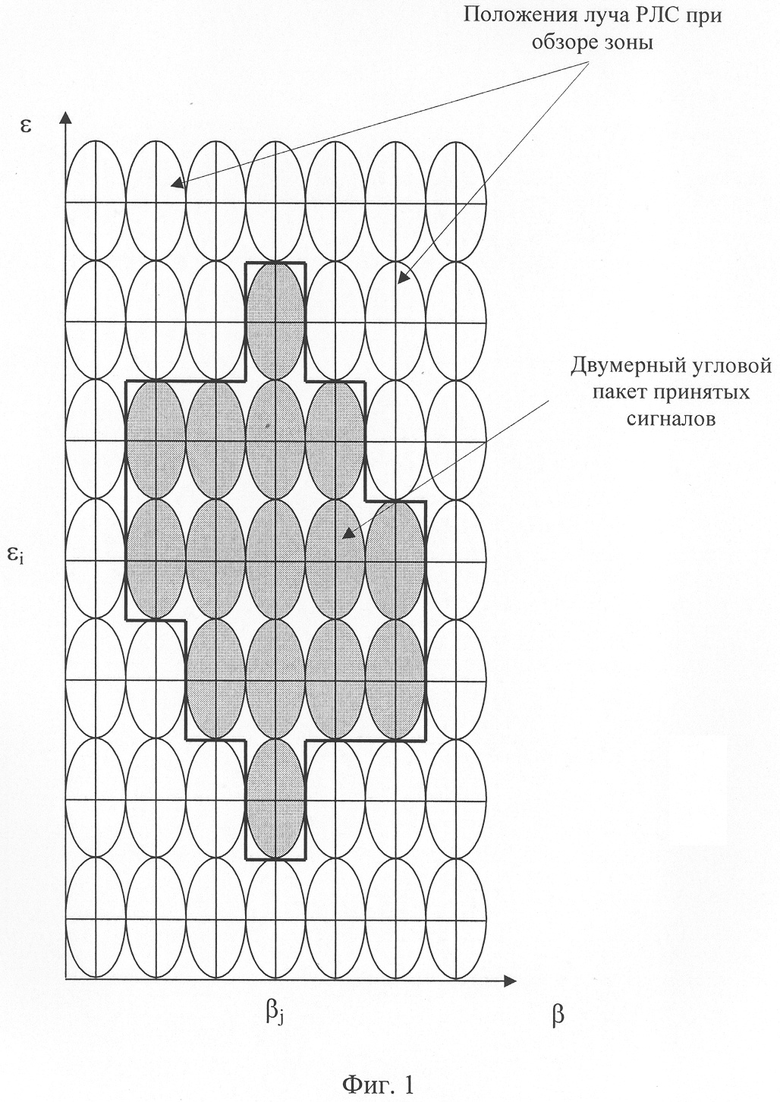
Поясним понятие "двумерный угловой пакет принятых сигналов".
В процессе обзора пространства радиолокационной станцией сигналы, отраженные от объекта и принятые приемником, сравниваются с порогом обнаружения. В результате в каждом положении луча антенны для каждой дискреты по дальности в плоскости угол места-азимут (ε-β) на выходе порогового устройства присутствует принятый сигнал, если он превышает уровень порога (сигнал обнаружен), сигнал на выходе порогового устройства отсутствует, если принятый сигнал ниже уровня порога (сигнал не обнаружен). Сигналы, обнаруженные в нескольких ближайших положениях луча на одинаковой дальности, образуют двумерный угловой пакет, если они не прерываются по обеим угловым координатам положениями луча, в которых сигнал не обнаружен (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М., "Советское радио", 1974, стр.30, рис.1.7). На фиг.1 приведен пример двумерного углового пакета принятых сигналов (обозначен затемненными положениями луча).
Наибольшее возможное количество положений луча в двумерном угловом пакете принятых сигналов далее обозначено М. Эта величина для конкретных параметров РЛС и объекта (дальности до объекта, шага перемещения луча при обзоре пространства, мощности зондирующего сигнала, вида диаграммы направленности антенны (ДНА), типа обнаруживаемых объектов) может быть определена заранее. Так, например, известно, что в обзорных РЛС средней дальности для шага перемещения луча антенны порядка 0.5 ширины луча антенны по уровню половинной мощности при обнаружении крупных летательных аппаратов сложной формы наибольший угловой пакет сигналов по одной угловой координате не превышает 5 положений луча. Таким образом, в РЛС указанного типа максимально возможная величина двумерного углового пакета равна 25 положениям луча, т.е. М=25. В большинстве случаев формируется двумерный угловой пакет меньших размеров. На фиг.1 приведен пример двумерного углового пакета принятых сигналов, состоящий из 15 положений луча.
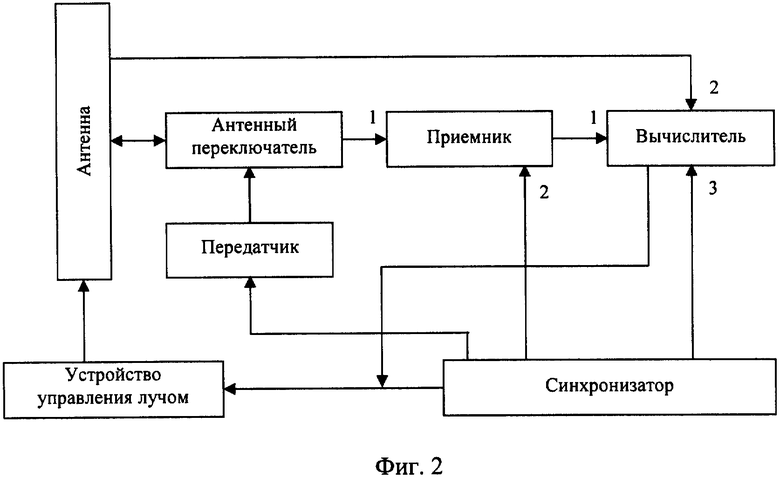
Известным устройством для измерения угловых координат объекта является обзорная радиолокационная станция (фиг.2), содержащая антенну, устройство управления лучом, выход которого соединен с антенной, последовательно соединенные передатчик, антенный переключатель, приемник и вычислитель, а также синхронизатор, при этом сигнальный вход/выход антенны соединен со входом/выходом антенного переключателя, а координатный ее выход - со вторым входом вычислителя, четыре выхода синхронизатора соединены соответственно со входом устройства управления лучом, входом передатчика, вторым входом приемника и с третьим входом вычислителя, выход вычислителя соединен со входом устройства управления лучом (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки: Введение в теорию: Пер с англ. - М.: Радио и связь, 1986, стр.19).
В известных способе и устройстве характеристики сигналов в пакете не анализируются и не используются. Определение же угловых координат объекта путем усреднения угловых положений луча в начале и в конце двумерного углового пакета принятых сигналов по соответствующей угловой координате не является оптимальным, поэтому точность измерения угловых координат объекта оказывается низкой. Таким образом, недостатком известных технических решений является низкая точность измерения угловых координат.
Наиболее близкий способ измерения угловых координат объекта (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов, Военное издательство Министерства обороны СССР, - М., 1968, стр.244-258) включает излучение зондирующих сигналов, прием отраженных от объекта сигналов, измерение амплитуд принятых сигналов и угловых координат луча антенны РЛС, соответствующих принятым сигналам, формирование двумерного углового пакета принятых сигналов, вычисление координат объекта по азимуту  и углу места
и углу места  , если отраженные от объекта сигналы не флюктуируют (формула 7.2.7 на с.247 указанного источника):
, если отраженные от объекта сигналы не флюктуируют (формула 7.2.7 на с.247 указанного источника):
где ρ1, ρ2, ...ρi, ..., ρn - выборочные значения амплитуд сигналов в строке (столбце) двумерного углового пакета, содержащей (содержащем) максимальное по пакету значение сигнала;
I0(.), I1(.) - модифицированная функция Бесселя первого типа нулевого и первого порядка соответственно;
 - весовой коэффициент, соответствующий i-му сигналу в пакете принятых сигналов;
- весовой коэффициент, соответствующий i-му сигналу в пакете принятых сигналов;
 - производная от весового коэффициента Аi;
- производная от весового коэффициента Аi;
А0 - величина сигнала в направлении максимума ДНА;
Q(.) - функция, определяющая вид нормированной к своему максимуму ДНА по измеряемой координате;
σ - среднеквадратическое значение шума;
θi - известное положение максимума ДНА в момент приема i-го импульса пакета;

или угловых координат объекта по азимуту  , и углу места
, и углу места  , если отраженные от объекта сигналы флюктуируют (формула 7.2.20 на с.257 указанного источника):
, если отраженные от объекта сигналы флюктуируют (формула 7.2.20 на с.257 указанного источника):
где  - отношение сигнал/шум i-го сигнала в пакете принятых сигналов;
- отношение сигнал/шум i-го сигнала в пакете принятых сигналов;
 - производная от отношения ki;
- производная от отношения ki;
 - максимальное значение сигнал/шум в пакете принятых сигналов, соответствующее максимуму ДНА;
- максимальное значение сигнал/шум в пакете принятых сигналов, соответствующее максимуму ДНА;
σ0 - максимальное значение среднеквадратического изменения отраженного сигнала;
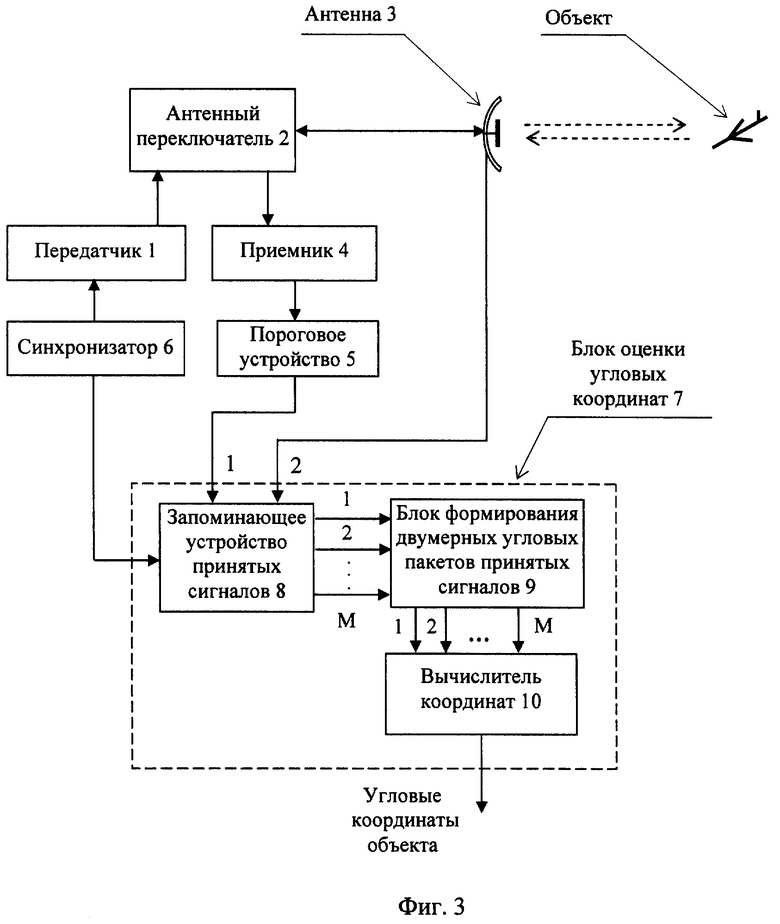
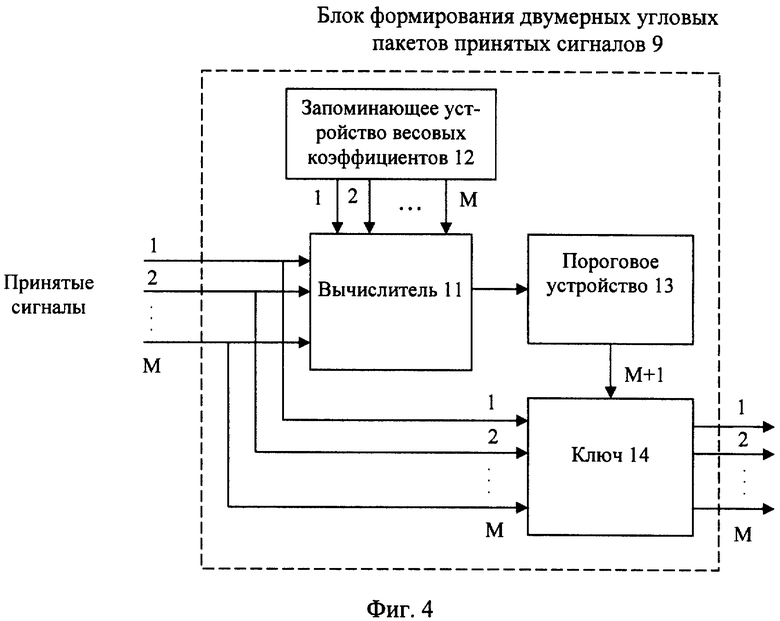
Наиболее близкой к заявляемой является РЛС (Теоретические основы радиолокации. Под ред. Я.Д.Ширмана, М., "Сов. радио", 1970, стр.221), содержащая (фиг.3) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, первый и второй выходы синхронизатора 6 соединены с синхровходами передатчика 1 и блока оценки угловых координат 7 соответственно, при этом блок оценки угловых координат 7 включает запоминающее устройство принятых сигналов 8, блок формирования двумерных угловых пакетов принятых сигналов 9 и вычислитель координат 10, причем первый, второй и третий входы запоминающего устройства принятых сигналов 8 являются соответственно первым, вторым входами и синхровходом блока оценки угловых координат 7, М выходов запоминающего устройства принятых сигналов 8 соединены с М входами блока формирования двумерных угловых пакетов принятых сигналов 9 (фиг.4), включающего вычислитель 11, первые М входов которого являются входами блока формирования двумерных угловых пакетов принятых сигналов 9, запоминающее устройство весовых коэффициентов 12, М выходов которого соединены со вторыми М входами вычислителя 11, пороговое устройство 13, соединенное с выходом вычислителя 11, и ключ 14, М входов которого соединены с первыми М входами вычислителя 11, а М+1-й вход соединен с выходом порогового устройства 13, М выходов ключа 14 являются выходами блока формирования двумерных угловых пакетов принятых сигналов 9 и соединены с М входами вычислителя координат 10, выход вычислителя координат 10 является выходом блока оценки угловых координат 7.
Работа наиболее близкой к заявляемой РЛС при измерении угловых координат объекта происходит следующим образом. В передатчике 1 по командам синхронизатора 5 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от объекта сигналы принимаются антенной 3, поступают в приемник 4. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат 7. Значения амплитуд принятых сигналов с соответствующими угловыми координатами луча по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство принятых сигналов 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства принятых сигналов 8 извлекаются записанные в них данные и подаются в блок формирования двумерных угловых пакетов принятых сигналов 9, где осуществляется анализ пространственного расположения направлений луча в пакете и формирование двумерных угловых пакетов принятых сигналов. Для этого амплитуды принятых сигналов и соответствующие принятым сигналам угловые координаты луча поступают на первые М входов вычислителя 11, на его вторые М входов поступают заранее записанные весовые коэффициенты из запоминающего устройства весовых коэффициентов 12. В вычислителе 11 производятся перемножения значений квадратов амплитуд принятых сигналов и соответствующих весовых коэффициентов и суммирование полученных произведений. Сигнал, пропорциональный полученной сумме, подается на вход порогового устройства 13, где сравнивается с заранее установленным порогом. Уровень порога задается исходя из допустимой вероятности ложного формирования углового пакета. При превышении порога на выходе порогового устройства 13 выдается импульс, означающий, что сформирован двумерный угловой пакет принятых сигналов. Данный импульс разрешает прохождение принятых сигналов и координат луча, соответствующих принятым сигналам, через ключ 14 на выход блока формирования двумерных угловых пакетов принятых сигналов 9 и далее - на М входов вычислителя координат 10. В вычислителе координат 10 в соответствии с ранее упомянутыми формулами (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов, Военное издательство Министерства обороны СССР, - М., 1968, формула 7.2.7 на с.247 и формула 7.2.20 на с.257) определяются угловые координаты объекта.
В наиболее близких способе и устройстве осуществляется весовая обработка сигналов, принятых в двумерном угловом пакете, которая потенциально обеспечивает высокую точность измерения угловых координат объекта. Однако указанная высокая точность измерения достигается только в случае, когда точно известна степень флюктуации амплитуды принятого сигнала, позволяющая правильно выбрать метод обработки сигналов. Такая информация о сигнале, как правило, отсутствует. В этих условиях выбор метода обработки принятых в пакете сигналов осуществляют на основе априорных данных о типе объекта. Так, например, известно, что ракета имеет простую геометрическую форму, поэтому сигнал от нее отражается в виде небольшого количества "блестящих точек" (как правило, одной), что приводит к относительной слабой флюктуации отраженного сигнала. Самолет же имеет сложную геометрическую форму с большим числом граней и ребер, поэтому сигнал от него отражается в виде множества "блестящих точек", что приводит к быстрой флюктуации отраженного сигнала. При отсутствии априорных данных об объекте (что, как правило, и имеет место) определение типа объекта является достаточно сложной технической задачей и в большинстве РЛС не может быть осуществлено с достаточной достоверностью. Ошибочное определение типа объекта приводит к ошибкам в выборе метода обработки принятых сигналов, а значит, и к ошибкам измерения угловых координат.
Таким образом, применение наиболее близких технических решений при неизвестной степени флюктуации отраженного сигнала приводит к существенным ошибкам измерения угловых координат.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей (техническим результатом), таким образом, является повышение точности измерения угловых координат объекта.
Указанный технический результат достигается тем, что в способе измерения угловых координат объекта в процессе обзора пространства радиолокационной станцией, включающем излучение зондирующих сигналов, прием отраженных от объекта сигналов, измерение амплитуд принятых сигналов (ρij) и угловых координат (εi, βj) луча антенны РЛС, соответствующих принятым сигналам, формирование двумерного углового пакета принятых сигналов, вычисление угловых координат объекта, согласно изобретению в сформированном двумерном угловом пакете принятых сигналов определяют координаты положения луча (εmax, βmax), в котором амплитуда принятого сигнала максимальна, определяют максимальное (ρmax) и минимальное (ρmin) значения амплитуд сигналов в пакете на входе антенны РЛС в соответствии с формулами, исключающими влияние ДНА на величину сигнала:


где i, j - порядковый номер положения луча в двумерном угловом пакете принятых сигналов в строке по углу места εi и в столбце по азимуту βj соответственно, i=1, ..., mj, j=1, ..., ni;
mj, ni - количество положений луча в двумерном угловом пакете принятых сигналов по углу места в столбце по азимуту βj и по азимуту в строке по углу места εi соответственно;

θε, θρ - ширина луча антенны по уровню половинной мощности по углу места и азимуту соответственно;
α=2.78 - аппроксимирующий коэффициент,
и вычисляют величину, характеризующую степень флюктуации отраженного от объекта сигнала, по формуле:

после чего определяют угловые координаты объекта по углу места и азимуту соответственно по формулам:


где и  - оценки угловой координаты объекта по углу места для флюктуирующего и нефлюктуирующего отраженного сигнала соответственно, полученные известными методами;
- оценки угловой координаты объекта по углу места для флюктуирующего и нефлюктуирующего отраженного сигнала соответственно, полученные известными методами;
и  - оценки угловой координаты объекта по азимуту для флюктуирующего и нефлюктуирующего отраженного сигнала соответственно, полученные известными методами.
- оценки угловой координаты объекта по азимуту для флюктуирующего и нефлюктуирующего отраженного сигнала соответственно, полученные известными методами.
Технический результат достигается также тем, что в радиолокационную станцию, содержащую передатчик, антенный переключатель, антенну, приемник, пороговое устройство, синхронизатор, блок оценки угловых координат, при этом выход передатчика соединен со входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен со входом приемника, выход которого соединен со входом порогового устройства, выход порогового устройства и координатный выход антенны соединены соответственно с первым и вторым входами блока оценки угловых координат, первый и второй выходы синхронизатора соединены соответственно с синхровходами передатчика и блока оценки угловых координат, при этом блок оценки угловых координат включает запоминающее устройство принятых сигналов, блок формирования двумерных угловых пакетов принятых сигналов и вычислитель, причем первый и второй входы запоминающего устройства принятых сигналов являются первым и вторым входами блока оценки угловых координат соответственно, М выходов запоминающего устройства принятых сигналов соединены с М входами блока формирования двумерных угловых пакетов принятых сигналов, включающего вычислитель, первые М входов которого являются входами блока обнаружения угловых пакетов, запоминающее устройство весовых коэффициентов, М выходов которого соединены со вторыми М входами вычислителя, пороговое устройство, соединенное с выходом вычислителя, и ключ, М входов которого соединены с первыми М входами вычислителя, а М+1-й вход соединен с выходом порогового устройства, М выходов ключа являются выходами блока формирования угловых пакетов принятых сигналов и соединены с М входами вычислителя координат, выход которого является выходом блока оценки угловых координат, согласно изобретению в блок оценки угловых координат дополнительно введен блок определения степени флюктуации сигналов, М входов которого соединены с М выходами блока формирования угловых пакетов принятых сигналов, а выход соединен с М+1-м входом вычислителя координат.
Суть заявляемых технических решений состоит в следующем.
Известно, что наибольшая точность измерения угловых координат объекта в РЛС обеспечивается оптимальной весовой обработкой принятых сигналов при известном законе (степени) флюктуации отраженного от объекта сигнала (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов, Военное издательство Министерства обороны СССР, - М., 1968, стр.244-258).
Поскольку степень флюктуации отраженных объектом сигналов заранее неизвестна, то она, а значит, и выбор того или иного метода обработки сигналов, принятых в двумерном угловом пакете, как правило, осуществляются путем предположения о типе объекта. Ошибка в определении типа объекта приводит к ошибкам в измерениях угловых координат объекта.
В заявляемых технических решениях степень флюктуации принятых сигналов определяется путем анализа принятых сигналов в двумерном угловом пакете. Характеристикой степени флюктуации принятых сигналов является величина γ, вычисляемая в соответствии с выражением (3). Входящие в (3) величины ρmax и ρmin (формулы (1) и (2)) представляют собой соответственно максимальное и минимальное значения амплитуд сигналов пакета на входе антенны, т.е. амплитуды сигналов, не измененные ДНА.
К оценкам угловых координат по углу места и азимуту, проведенным известными способами для флюктуирующего ( и ) и нефлюктуирующего ( и ) сигналов, на основании оценки степени флюктуации принятых сигналов применяется весовая обработка в соответствии с формулами (4) и (5), увеличивающая точность измерения угловых координат при заранее неизвестной степени флюктуации принимаемых сигналов.
Оценки угловых координат ( и ) и ( и ) могут быть получены, например, как указано в упомянутой книге Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов, Военное издательство Министерства обороны СССР, - М., 1968 в формулах 7.2.7 на с.247 и 7.2.20 на с.257 соответственно.
При двумерном угловом пакете указанные оценки могут быть определены следующим образом.
Для нефлюктуирующего по амплитуде сигнала оценка угловой координаты или определяется из уравнения:
где ρ1, ρ2, ...ρi, ..., ρn - выборочные значения амплитуд сигналов в строке (столбце) двумерного углового пакета, содержащей (содержащем) максимальное по пакету значение сигнала;
I0(.), I1(.) - модифицированная функция Бесселя первого типа нулевого и первого порядка соответственно;
- весовой коэффициент, соответствующий i-му сигналу в пакете принятых сигналов;
- производная от весового коэффициента Аi;
А0 - величина сигнала в направлении максимума ДНА;
Q(.) - функция, определяющая вид нормированной к своему максимуму ДНА по измеряемой координате;
σ - среднеквадратическое значение шума;
θi - известное положение максимума ДНА в момент приема i-го импульса пакета;

Для флюктуирующего по амплитуде сигнала оценка угловой координаты объекта или определяется из уравнения:
где - отношение сигнал/шум i-го сигнала в пакете принятых сигналов;
- производная от отношения ki;
- максимальное значение сигнал/шум в пакете принятых сигналов, соответствующее максимуму ДНА;
σ0 - максимальное значение среднеквадратического изменения отраженного сигнала;
Оценки угловых координат могут быть получены также в соответствии с математическими формулами, приведенными в статье: Кисляков В.И., Лужных С.Н., Прудников С.Я. "Измерение угловых координат объекта одноканальной импульсной РЛС по угловому пакету произвольных размеров". Радиопромышленность, 2005, вып.1, с.83.
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - пример двумерного углового пакета принятых сигналов.
Фиг.2 - блок-схема известной РЛС.
Фиг.3 - блок-схема наиболее близкой РЛС.
Фиг.4 - блок формирования двумерных угловых пакетов принятых сигналов 9.
Фиг.5 - блок-схема заявляемой РЛС.
Заявляемый способ измерения угловых координат объекта реализуется с помощью радиолокационной станции, которая содержит (фиг.5) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, первый и второй выходы синхронизатора 6 соединены соответственно с синхровходами передатчика 1 и блока оценки угловых координат 7, при этом блок оценки угловых координат 7 включает запоминающее устройство принятых сигналов 8, блок формирования двумерных угловых пакетов принятых сигналов 9, блок определения степени флюктуации сигналов и вычислитель координат 10, причем первый и второй входы запоминающего устройства принятых сигналов 8 являются первым и вторым входами блока оценки угловых координат 7 соответственно, М выходов запоминающего устройства принятых сигналов 8 соединены с М входами блока формирования двумерных угловых пакетов принятых сигналов 9, включающего вычислитель 11, первые М входов которого являются входами блока формирования двумерных угловых пакетов принятых сигналов 9, запоминающее устройство весовых коэффициентов 12, М выходов которого соединены со вторыми М входами вычислителя 11, пороговое устройство 13, соединенное с выходом вычислителя 11, и ключ 14, М входов которого соединены с первыми М входами вычислителя 11, а М+1-й вход соединен с выходом порогового устройства 13, М выходов ключа 14 являются выходами блока формирования двумерных угловых пакетов принятых сигналов 9 и соединены с М входами вычислителя координат 10, М выходов блока формирования двумерных угловых пакетов принятых сигналов 9 соединены также с М входами блока определения степени флюктуации сигналов 15, выход которого соединен с М+1-м входом вычислителя координат 10. Выход вычислителя координат 10 является выходом блока оценки угловых координат 7.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам, неподвижная или с круговым механическим вращением (Справочник по радиолокации. Под ред. М.Сколника, т.2, - М.: "Советское радио", 1977, с.132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Цифровые элементы: запоминающее устройство принятых сигналов 8, вычислитель координат 10, вычислитель 11, запоминающее устройство весовых коэффициентов 12, ключ 14 - выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина, - М.: "Радио и связь", 1984).
Блок формирования двумерных угловых пакетов принятых сигналов 9 (фиг.4) построен на основе известной структурной схемы (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М., "Советское радио", 1974, стр.38-40, рис.1.11).
Вычислитель координат 10 реализует вычисления в соответствии с формулами (4)-(7).
Вычислитель 11 реализует вычисления в соответствии с формулой:  , где nij - весовые коэффициенты, определенные заранее (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М., "Советское радио", 1974, стр.39, формула (1, 3, 6а)).
, где nij - весовые коэффициенты, определенные заранее (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации, М., "Советское радио", 1974, стр.39, формула (1, 3, 6а)).
Блок определения степени флюктуации сигналов 15 - вычислитель, реализующий вычисления в соответствии с формулами (1)-(3).
Работа заявляемой РЛС (фиг.5) при измерении угловых координат объекта происходит следующим образом. В передатчике 1 по командам синхронизатора 5 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от объекта сигналы принимаются антенной 3, поступают в приемник 4. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат 7. Значения амплитуд сигналов с соответствующими угловыми координатами луча по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство принятых сигналов 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства принятых сигналов 8 извлекаются записанные в них данные и подаются в блок формирования двумерных угловых пакетов принятых сигналов 9, где осуществляется анализ координат принятых сигналов и формирование углового пакета принятых сигналов. Для этого амплитуды принятых сигналов и соответствующие принятым сигналам угловые координаты луча поступают на первые М входов вычислителя 11, на его вторые М входов поступают заранее записанные весовые коэффициенты из запоминающего устройства весовых коэффициентов 12. В вычислителе 11 производятся перемножения значений квадратов амплитуд сигналов и соответствующих весовых коэффициентов и суммирование полученных произведений. Сигнал, пропорциональный полученной сумме, подается на вход порогового устройства 13, где сравнивается с заранее установленным порогом. Уровень порога задается исходя из допустимой вероятности ложного формирования углового пакета. При превышении порога на выходе порогового устройства 13 выдается импульс, означающий, что сформирован двумерный угловой пакет принятых сигналов. Данный импульс разрешает прохождение принятых сигналов и координат луча, соответствующих принятым сигналам, через ключ 14 на выход блока обнаружения двумерных угловых пакетов принятых сигналов 9 и далее на М входов блока определения степени флюктуации сигналов 15 и вычислителя координат 10. В блоке определения степени флюктуации сигналов 15 в соответствии с формулами (1)-(3) определяется величина γ, характеризующая степень флюктуации принятых в пакете сигналов. Эта величина подается на М+1-й вход вычислителя координат 10, где в соответствии с формулами (4)-(7) определяются угловые координаты объекта.
Таким образом, заявляемые технические решения обеспечивают достижение технического результата - повышение точности измерения угловых координат объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ | 2008 |
|
RU2366971C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358281C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА | 2006 |
|
RU2325669C1 |
| СПОСОБ ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358285C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2007 |
|
RU2362183C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ | 2015 |
|
RU2581898C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2008 |
|
RU2363015C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2009 |
|
RU2408029C1 |
| Способ измерения угловых координат цели | 2016 |
|
RU2649880C1 |
Предлагаемые технические решения относятся к области радиолокации и могут быть использованы в обзорных одноканальных радиолокационных станциях (РЛС) с фазированной антенной решеткой (ФАР) для измерения угловых координат объектов. Достигаемым техническим результатом является повышение точности измерения угловых координат объекта. Технический результат достигается за счет излучения зондирующих сигналов, приема отраженных от объекта сигналов, измерения амплитуд принятых сигналов (ρij) и угловых координат (εi, βj) луча антенны РЛС, соответствующих принятым сигналам, формирования двумерного углового пакета принятых сигналов, вычисления угловых координат объекта, при этом в сформированном двумерном угловом пакете принятых сигналов определяют координаты положения луча (εmax, βmax), в котором амплитуда принятого сигнала максимальна, определяют максимальное (ρmax) и минимальное (ρmin) значения амплитуд сигналов на входе антенны РЛС и вычисляют величину, характеризующую степень флюктуации отраженного от объекта сигнала, после чего определяют угловые координаты объекта по углу места и азимуту. 2 н.п. ф-лы, 5 ил.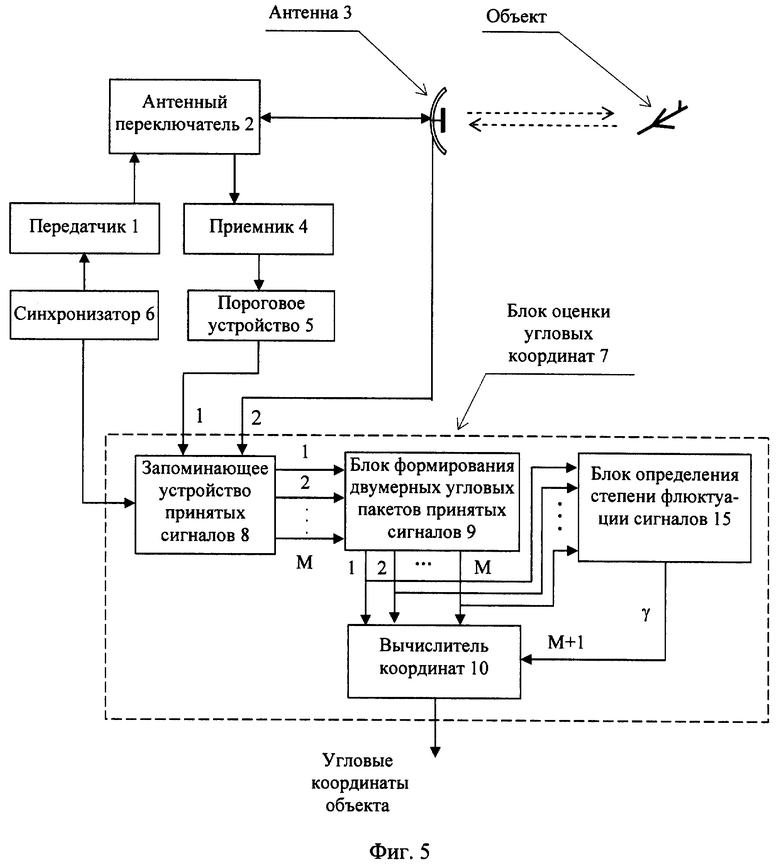
где i, j - порядковый номер положения луча в двумерном угловом пакете принятых сигналов в строке по углу места εi и в столбце по азимуту βj соответственно, i=1, ..., mj, j=1, ..., ni;
mj, ni - количество положений луча в двумерном угловом пакете принятых сигналов по углу места в столбце по азимуту βj и по азимуту в строке по углу места εi соответственно;
εi≠εmax; βj≠βmax;
θε, θβ - ширина луча антенны по уровню половинной мощности по углу места и азимуту соответственно;
α=2,78 - аппроксимирующий коэффициент,
и вычисляют величину, характеризующую степень флюктуации отраженного от объекта сигнала, по формуле
после чего определяют угловые координаты объекта по углу места и азимуту соответственно по формулам


где  и
и  - оценки угловой координаты объекта по углу места для флюктуирующего и нефлюктуирующего отраженного сигнала соответственно, полученные известными методами;
- оценки угловой координаты объекта по углу места для флюктуирующего и нефлюктуирующего отраженного сигнала соответственно, полученные известными методами;
 и
и  оценки угловой координаты объекта по азимуту для флюктуирующего и нефлюктуирующего отраженного сигнала.
оценки угловой координаты объекта по азимуту для флюктуирующего и нефлюктуирующего отраженного сигнала.
| Теоретические основы радиолокации./ Под ред | |||
| Я.Д | |||
| Ширмана | |||
| - М.: Сов | |||
| Радио, 1970, с.221 | |||
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| RU 2004121261 A, 10.01.2006 | |||
| US 5166689 А, 24.11.1992 | |||
| US 6611226 В1, 26.08.2003. | |||

