Изобретение относится к техническим средствам автоматизации и может быть использовано в пневматических системах автоматического управления.
Известны устройства, в которых управляющие сигналы на позиционирование исполнительного механизма, совершающего возвратно-поступательное движение, формируются с помощью ряда датчиков, установленных на перемещающемся органе и воздействующих, например, на неподвижный контакт (Авторское свидетельство № 1826637, кл. F15B 15/28, «Гидроцилиндр с индикацией положения», бюл. № 20 от 20.07.95), или с помощью одного перемещающегося конечного выключателя, на который воздействуют упоры, предварительно установленные в заданных положениях (Авторское свидетельство № 339907, кл. G05B 19/44, «Гидравлическое программное устройство», бюл. №17 от 01.01.72).
Известны пневматические программные устройства, в которых формирование управляющих сигналов (команд) производится с помощью программоносителя, выполненного в виде жесткой перфокарты, связанной со штоком цилиндра («Пневматика и гидравлика. Приводы и системы управления». Выпуск 6. Под ред. Е.В.Герц, М.: Машиностроение, 1979, с.168).
Наиболее близким к предлагаемому изобретению по совокупности признаков является струйная позиционная система числового управления, содержащая цилиндр с установленным в нем поршнем со штоком, причем шток жестко связан с базовой измерительной шкалой (программоносителем), которая, воздействуя на измерительный элемент (датчик типа «сопло - приемный канал»), формирует на выходе измерительного элемента управляющий сигнал («Пневматика и гидравлика. Приводы и системы управления». Выпуск 2. Под ред. Е.В.Герц, М.: Машиностроение, 1975, с.159, рис.2).
Все вышеперечисленные устройства является дискретными, то есть позволяют получать информацию только о некоторых положениях поршня, определяемых расположением датчиков, упоров или конфигурацией измерительной шкалы.
Техническим результатом предлагаемого технического решения является упрощение конструкции и расширение функциональных возможностей устройства.
Указанный технический результат достигается тем, что в струйном устройстве позиционирования привода возвратно-поступательного движения, содержащем цилиндр с установленным в нем поршнем со штоком, жестко связанным с базовой измерительной шкалой, которая воздействует на измерительный элемент, измерительный элемент выполнен в виде пневматического датчика, величина давления на выходе которого пропорциональна величине измерительного зазора между датчиком и измерительной шкалой, выполненной в виде поворотной планки, наклон которой устанавливается регулировочным винтом, при этом выход пневматического датчика связан с входом управления струйного порогового устройства, на выходе которого формируется управляющий сигнал, а вход смещения струйного порогового устройства связан с настроечным дросселем.
Применение измерительного элемента в виде пневматического датчика, величина давления на выходе которого пропорциональна измерительному зазору между датчиком и измерительной шкалой, выполненной в виде поворотной планки, а также использование струйного порогового устройства, вход управления которого связан с выходом датчика, а вход смещения - с настроечным дросселем, позволяет формировать управляющий сигнал в любом требуемом положении поршня.
На чертеже изображено струйное устройство позиционирования привода возвратно-поступательного движения.
Устройство содержит цилиндр 1, в котором установлен поршень 2 со штоком 3. На штоке 3 закреплен кронштейн 4, на котором установлена поворотная планка 5. Один конец поворотной планки 5 закреплен на оси 6, другой связан пружиной 7 с кронштейном 4. Между поворотной планкой 5 и пневматическим датчиком 8 формируется измерительный зазор s. Величина измерительного зазора s зависит от текущего положения поршня и угла наклона поворотной планки 5. Угол наклона устанавливается регулировочным винтом 9. Выход пневматического датчика 8 связан с входом управления струйного порогового устройства 10. Вход смещения струйного порогового устройства 10 связан с настроечным дросселем 11.
В качестве пневматического датчика может быть использован, например, струйный кольцевой конечный выключатель типа СТ 135 («Струйные логические элементы и устройства автоматического управления технологическим оборудованием». Отраслевой каталог. Под ред. Э.И.Чаплыгина, М.: ВНИИТЭМР, 1989, стр.23, рис.56), а в качестве струйного порогового устройства может быть использован, например, триггер Шмитта (см. там же, стр.27, рис.67).
Струйное устройство позиционирования привода возвратно-поступательного движения работает следующим образом.
В зависимости от выбранного типа датчика, то есть от величины рабочего диапазона измерительного зазора, с помощью регулировочного винта 9 предварительно устанавливается угол наклона поворотной планки 5. С помощью настроечного дросселя 11 предварительно устанавливается величина давления смещения рс, соответствующая требуемой величине выдвижения штока 3.
При выдвижении штока 3 величина измерительного зазора s между поворотной планкой 5 и пневматическим датчиком 8 уменьшается и на его выходе, а следовательно и на входе управления струйного порогового устройства 10 величина давления ру возрастает. При достижении этим давлением уровня давления переключения струйного порогового устройства 10, определяемого величиной давления смещения рс, пороговое устройство переключается. На его выходе установится давление рв, которое может быть использовано в качестве управляющей команды на остановку поршня, а также, при необходимости, на изменение скорости или направления его движения.
Струйное устройство позиционирования привода возвратно-поступательного движения обладает широкими функциональными возможностями, так как позволяет формировать команды управления при любом требуемом положении поршня. Упрощение конструкции достигается за счет исключения из процесса управления датчиков (или упоров), определяющих промежуточные положения поршня.
| название | год | авторы | номер документа |
|---|---|---|---|
| Струйная позиционная пневматическая система привода длинноходовых установочных координатных перемещений | 2023 |
|
RU2802568C1 |
| СТРУЙНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПНЕВМОЦИЛИНДРОМ | 2007 |
|
RU2355011C2 |
| СТРУЙНОЕ УСТРОЙСТВО ДЛЯ ЗАПОМИНАНИЯ ВЕЛИЧИНЫ АНАЛОГОВОГО СИГНАЛА | 2002 |
|
RU2237281C2 |
| ПНЕВМАТИЧЕСКОЕ ПРОГРАММНОЕ УСТРОЙСТВО | 2010 |
|
RU2427874C1 |
| СТРУЙНЫЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 2004 |
|
RU2274883C2 |
| ПНЕВМАТИЧЕСКОЕ ПРОГРАММНОЕ УСТРОЙСТВО | 2007 |
|
RU2350791C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2464451C2 |
| Сверлильная головка | 1983 |
|
SU1131606A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268401C2 |
| Пневматическая система автоматического регулирования загрузки двигателя уборочной машины | 1982 |
|
SU1113779A1 |
Изобретение относится к техническим средствам автоматизации и может быть использовано в пневматических системах автоматического управления. Техническим результатом изобретения является упрощение конструкции и расширение функциональных возможностей за счет того, что позволяет формировать команды управления при любом требуемом положении поршня. Струйное устройство позиционирования привода возвратно-поступательного движения содержит цилиндр с установленным в нем поршнем со штоком, жестко связанным с базовой измерительной шкалой, которая воздействует на измерительный элемент. Предлагаемое устройство отличается от известных тем, что измерительный элемент выполнен в виде пневматического датчика, величина давления на выходе которого пропорциональна величине измерительного зазора между датчиком и измерительной шкалой, выполненной в виде поворотной планки, наклон которой устанавливается регулировочным винтом, при этом выход пневматического датчика связан с входом управления струйного порогового устройства, на выходе которого формируется управляющий сигнал, а вход смещения струйного порогового устройства связан с настроечным дросселем. 1 ил.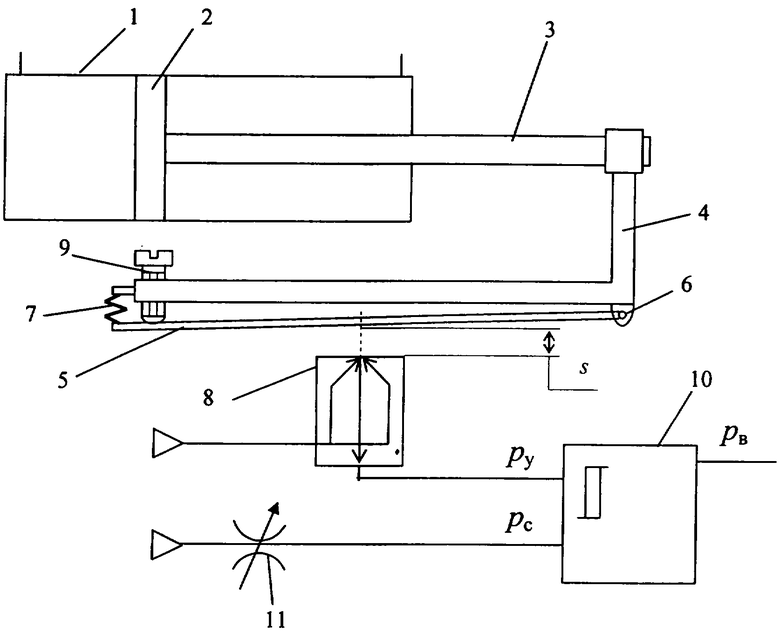
Струйное устройство позиционирования привода возвратно-поступательного движения, содержащее цилиндр с установленным в нем поршнем со штоком, жестко связанным с базовой измерительной шкалой, которая воздействует на измерительный элемент, отличающееся тем, что измерительный элемент выполнен в виде пневматического датчика, величина давления на выходе которого пропорциональна величине измерительного зазора между датчиком и измерительной шкалой, выполненной в виде поворотной планки, наклон которой устанавливается регулировочным винтом, при этом выход пневматического датчика связан с входом управления струйного порогового устройства, на выходе которого формируется управляющий сигнал, а вход смещения струйного порогового устройства связан с настроечным дросселем.
| Приспособление для шлифования бандажей железнодорожных колесных пар без выкатывания их | 1932 |
|
SU33420A1 |
| Ролик к приспособлению для смазывания рельсов на криволинейных участках пути | 1930 |
|
SU20689A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 1990 |
|
RU2029350C1 |
| Устройство для позиционирования руки промышленного робота | 1980 |
|
SU906687A1 |
| Устройство для позиционирования пневмопривода | 1979 |
|
SU861773A1 |
| СПОСОБ ОБЖИГА ПОДИНЫ АЛЮМИНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 0 |
|
SU352964A1 |
| DE 3010207 А1, 24.09.1981 | |||
| US 2004261608 А, 30.12.2004 | |||
| US 4481768 А, 13.11.1984. | |||

