Изобретение относится к техническим средствам автоматизации и может быть использовано в пневматических системах автоматического управления.
Среди многообразия целевых машин значительный объем исполнительных движений занимают длинноходовые установочные и координатные перемещения, требующие сокращения длительности и повышения точности перемещения. При длинноходовых перемещениях появляется ухудшение динамического качества и позиционирования привода из-за наличия трения поршня и нелинейных характеристик потока сжатого газа в значительных объемах напорной и сливной полостях цилиндра.
Известна струйная позиционная система числового управления, содержащая цилиндр с установленным в нем поршнем со штоком, причем шток жестко связан с базовой измерительной шкалой (программоносителем), которая, воздействуя на измерительный элемент (датчик типа «сопло - приемный канал»), формирует на выходе измерительного элемента управляющий сигнал («Пневматика и гидравлика. Приводы и системы управления». Выпуск 2. Под ред. Е.В.Герц, М.: Машиностроение, 1975, с. 159, рис. 2).
Наиболее близким техническим решением является струйное устройство позиционирования привода возвратно-поступательного движения (см. пат. RU 2352973, G05B19/44, опубл. 20.04.2009) содержащее цилиндр с установленным в нем поршнем со штоком, жестко связанным с базовой измерительной шкалой, которая воздействует на измерительный элемент, отличающееся тем, что измерительный элемент выполнен в виде пневматического датчика, величина давления на выходе которого пропорциональна величине измерительного зазора между датчиком и измерительной шкалой, выполненной в виде поворотной планки, наклон которой устанавливается регулировочным винтом, при этом выход пневматического датчика связан с входом управления струйного порогового устройства, на выходе которого формируется управляющий сигнал, а вход смещения струйного порогового устройства связан с настроечным дросселем.
Недостатком данного устройства является то, что датчик разработан для цилиндра со штоком, точность данного решения может меняться в зависимости от перекосов крепления сопла и поворотной планки.
Сущность изобретения заключается в том, что струйная позиционная пневматическая система привода длинноходовых установочных координатных перемещений, харктеризующаяся тем, что включает бесштоковый пневмоцилиндр, имеющий напорную и сливную полости, с закрепленной на его крышке прецизионной линейкой, а его поршень связан с кареткой, на которой с помощью переходных плит жестко закреплены двухсопловой струйный датчик и тормозные пневмоцилиндры, а устройство подготовки воздуха связано пневматическими линиями связи с входными каналами управляющего распределителя, двухпозиционным распределителем с электропневматическим управлением и двухпозиционным распределителем с пневматическим управлением, при этом управляющий распределитель работает с помощью шагового двигателя, на двух входах которого стоят глушители, а третий вход соединен пневматическими линиями связи с устройством подготовки воздуха, выходы из управляющего распределителя соединены со входами в дроссели с обратными клапанами, а выходы из дросселей с обратными клапанами соединены с напорной и сливной полостями бесштокового пневмоцилиндра, двухпозиционный распределитель с электропневматическим управлением с помощью электромагнита, на одном из выходов которого стоит глушитель, а второй соединен пневматическими линиями связи с устройством подготовки воздуха, выход из двухпозиционного распределителя с электропневматическим управлением соединен с двухсопловым струйным датчиком и каналом, осуществляющим пневматическое управление двухпозиционным распределителем с пневматическим управлением, у которого на одном из выходов также стоит глушитель, а второй соединен пневматическими линиями связи с устройством подготовки воздуха, при этом выход из двухпозиционного распределителя с пневматическим управлением соединен с тормозными пневмоцилиндрами, выход из двухсоплового струйного датчика соединен со входами трехмебранного триггера, а выход из трехмебранного триггера соединен пневматической линией связи с датчиком давления, выход из датчика давления связан с помощью электрической линии связи с программируемым логическим контроллером, выход из которого соединен с электромагнитом двухпозиционного распределителя с электропневматическим управлением и соединен с шаговым двигателем, активирующим управляющий распределитель.
Техническим результатом предлагаемого технического решения является расширение функциональных возможностей устройства.
Технический результат достигается тем, что струйная позиционная система, состоящая из пневмоцилиндра, двухсоплового струйного датчика, прецизионной линейки, трехмебранного триггера, датчика давления и ПЛК, формирующие управляющие сигналы на замедления и останов с позиционированием, отличается тем, что в систему вводятся дополнительные устройства. Повышение быстродействия осуществляется введением дискретно-пропорционального регулирующего устройства, управляемое сигналами, формируемые контуром управления, выполнена в виде двух сопел и содержит компенсационные измерения. Для обеспечения максимального быстродействия, реализуемого субоптимальной траекторией движения объекта управления, вводится дискретно-пропорциональное управляющее устройство с управляемым сигналом, формируемым трехмембранным триггером по командам струйного датчика на этапах замедления и останова.
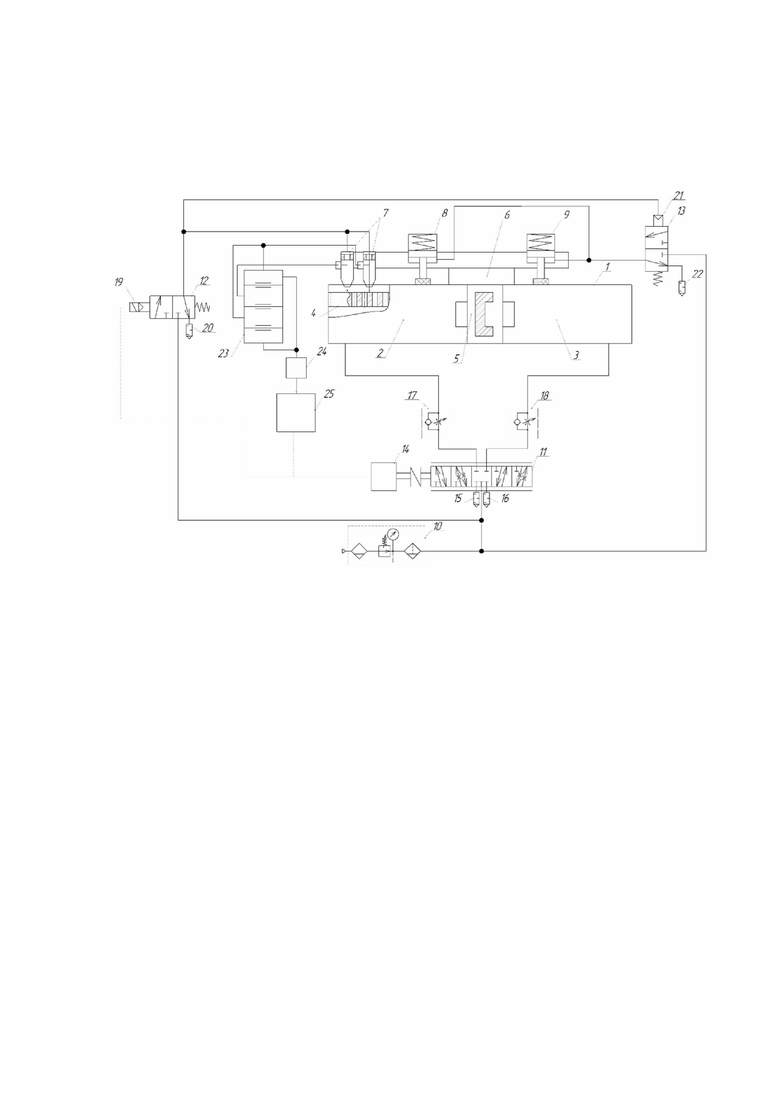
Сущность изобретения поясняется чертежом, где представлено устройство струйной позиционной пневматической системы привода длинноходовых установочных координатных перемещений.
Устройство содержит бесштоковый пневмоцилиндр - 1, имеющий напорную полость - 2 и сливную полость - 3, на крышке его жестко закреплена прецизионная линейка - 4. Поршень - 5 бесштокового пневмоцилиндра 1 связан с кареткой - 6, на каретке - 6 с помощью переходных плит жестко закреплен двухсопловой струйный датчик - 7, тормозные пневмоцилиндры - 8 и 9 соединены также с кареткой - 6 бесштокового пневмоцилиндра - 1. Устройство подготовки воздуха - 10 связано пневматическими линиями связи с входными каналами управляющего распределителя - 11, двухпозиционным распределителем с электропневматическим управлением - 12 и двухпозиционным распределителем с пневматическим управлением - 13.
Управляющий распределитель - 11 работает с помощью шагового двигателя - 14, на двух входах которого стоят глушители - 15 и 16, а третий вход соединен пневматическими линиями связи с устройством подготовки воздуха - 10. Выходы из управляющего распределителя - 11 связаны пневматическими линиями связи со входами в дроссели с обратным клапаном - 17 и 18.
Выход из дросселя с обратным клапаном - 17 соединен с напорной полостью - 2, а выход из дросселя с обратным клапаном - 18 соединен со сливной полостью - 3 бесштокового пневмоцилиндра - 1.
Двухпозиционный распределитель с электропневматическим управлением - 12 имеет управление в виде электромагнита - 19, на одном из выходов которого стоит глушитель - 20, а второй соединен пневматическими линиями связи с устройством подготовки воздуха - 10. Выход из двухпозиционного распределителя с электропневматическим управлением - 12 соединен с двухсопловым струйным датчиком - 7 и каналом, осуществляющим пневматическое управление - 21 двухпозиционным распределителем с пневматическим управлением - 13.
Двухпозиционный распределитель с пневматическим управлением - 13 имеет пневматическое управление - 21, на одном из выходов которого стоит глушитель - 22, а второй соединен пневматическими линиями связи с устройством подготовки воздуха - 10. Выход из двухпозиционного распределителя с пневматическим управлением - 13 соединен с тормозными пневмоцилиндрами - 8 и 9.
Выход из двухсоплового струйного датчика - 7 соединен со входами трехмебранного триггера - 23. Выход из трехмебранного триггера - 23 соединен пневматической линией связи с датчиком давления - 24.
Выход из датчика давления - 24 связан с помощью электрической линии связи с программируемым логическим контроллером - 25, выход из которого соединен с электромагнитом - 19 двухпозиционного распределителя с электропневматическим управлением - 12 и соединен с шаговым двигателем - 14, активирующим управляющий распределитель - 11.
Устройство работает следующим образом.
Оператор задает в программируемый логический контроллер 25 требуемую координату остановки, подается сигнал по электрическим линиям связи на управление шаговым двигателем 14 и электромагнит 19 двухпозиционного распределителя с электропневматическим управлением 12. Управляющий распределитель 11 получает команду от шагового двигателя 14 и переключается в первую позицию, двухпозиционный распределитель с электропневматическим управлением 12 получает команду от электромагнита 19 переключается в первую позицию. Давление из устройства подготовки воздуха 10, по пневматическим линиям связи через двухпозиционный распределитель с электропневматическим управлением 12 поступает на двухсопловой струйный датчик 7 и в управляющий канал, осуществляющий пневматическое управление 21 двухпозиционным распределителем с пневматическим управлением 13, он переключается в первую позицию и тормозные пневмоцилиндры 8 9 размыкаются. Максимальное давление из устройства подготовки воздуха 10, по пневматическим линиям связи через управляющий распределитель 11 подается через дроссель с обратным клапаном 17 в напорную полость 2 бесштокового пневмоцилиндра 1, а из сливной полости 3 давление сбрасывается, проходя дроссель с обратным клапаном 18 в атмосферу через глушитель 16. Каретка 6 бесштокового пневмоцилиндра 1 начинает быстрое перемещение.
Во время движения двухсопловой струйный датчик 7, преодолевая отверстия в прецизионной линейке 4, посылает давления от сопловых элементов в полости трехмебранного триггера 23, причем давления поступают в виде импульсов и когда от одного соплового элемента поступает максимальное давление, то от другого - минимальное. В полостях трехмебранного триггера 23 происходит сравнение полученных давлений и при их совпадении команда поступает в датчик давления 25. Данные из датчика 25 по электрическим линиям связи посылаются в программируемый логический контроллер 25 и происходит их подсчет. Когда поступают данные от предпоследней координаты в программируемый логический контроллер 25, он подает сигнал по электрическим линиям связи на управление шаговым двигателем 14 и электромагнит 19 двухпозиционного распределителя с электропневматическим управлением 12. Управляющий распределитель 11 получает команду от шагового двигателя 14 и переключается в позицию дросселирования. Максимальное давление из устройства подготовки воздуха 10, по пневматическим линиям связи через дросселирующее отверстие управляющего распределителя 11 подается через дроссель с обратным клапаном 17 в напорную полость 2 бесштокового пневмоцилиндра 1, а из сливной полости 3 давление сбрасывается, проходя дроссель с обратным клапаном 18 в атмосферу через глушитель 16. Каретка 6 бесштокового пневмоцилиндра 1 начинает замедлятся и продолжает движение с невысокой скоростью позиционирования.
Когда поступают данные о достижении последней координаты в программируемый логический контроллер 25, он подает сигнал по электрическим линиям связи на управление шаговым двигателем 14 и электромагнит 19 двухпозиционного распределителя с электропневматическим управлением 12. Управляющий распределитель 11 получает команду от шагового двигателя 14 и переключается в позицию стоп, двухпозиционный распределитель с электропневматическим управлением 12 получает команду от электромагнита 19 переключается во вторую позицию. Давление из канала пневматического управления 21 двухпозиционного распределителя с пневматическим управлением 13 по пневматическим линиям связи через двухпозиционный распределитель с электропневматическим управлением 12 сбрасывается через глушитель 20 в атмосферу. Двухпозиционный распределитель с пневматическим управлением 13 переключается в первую позицию, тем самым замыкая тормозные пневмоцилиндры 8 9. Каретка 6 бесштокового пневмоцилиндра 1 останавливается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| Установка для деформирования трубчатых заготовок | 1982 |
|
SU1065061A1 |
| Устройство управления пневмоцилиндром | 2021 |
|
RU2759706C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2000 |
|
RU2241867C2 |
| Пневматическая противоблокировочная тормозная система транспортного средства | 1981 |
|
SU1043055A1 |
| ЭКЗОСКЕЛЕТ С ЭЛЕКТРОПНЕВМАТИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2014 |
|
RU2565101C1 |
| Система управления пневматическим приводом прислонно-сдвижной двери пассажирского вагона | 2017 |
|
RU2661254C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ МОДУЛЬ ДЛЯ ПРИВОДА ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2249662C1 |
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
| Система управления пневматическим манипулятором | 1978 |
|
SU943647A1 |
Изобретение относится к системам управления. Струйная позиционная пневматическая система привода длинноходовых установочных координатных перемещений включает бесштоковый пневмоцилиндр, устройство подготовки воздуха, пневматические линии связи, управляющий распределитель, двухпозиционный распределитель с электропневматическим управлением и двухпозиционный распределитель с пневматическим управлением. Управляющий распределитель работает с помощью шагового двигателя, на двух входах которого стоят глушители, а третий вход соединен с устройством подготовки воздуха. Двухпозиционный распределитель с электропневматическим управлением соединен с устройством подготовки воздуха. Двухпозиционный распределитель с пневматическим управлением соединен с тормозными пневмоцилиндрами. Двухсопловый струйный датчик соединен с трехмембранным триггером, а триггер соединен с датчиком давления. Датчик давления связан с программируемым логическим контроллером, который соединен с электромагнитом двухпозиционного распределителя с электропневматическим управлением и соединен с шаговым двигателем, активирующим управляющий распределитель. Решение направлено на расширение функциональных возможностей. 1 ил.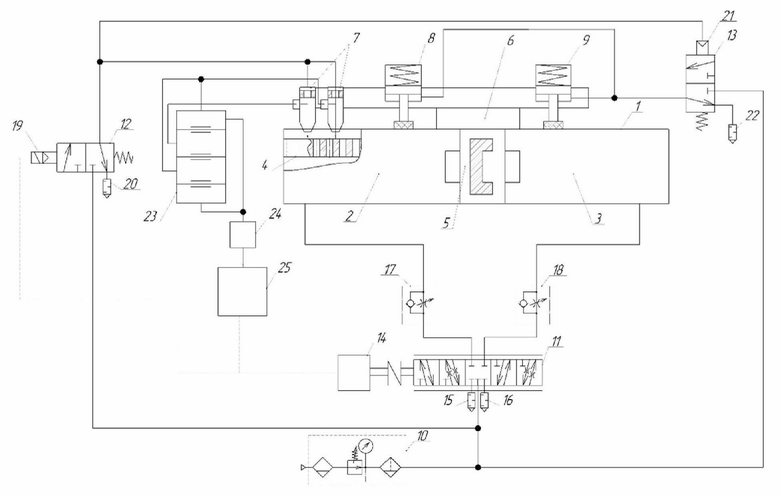
Струйная позиционная пневматическая система привода длинноходовых установочных координатных перемещений, характеризующаяся тем, что включает бесштоковый пневмоцилиндр, имеющий напорную и сливную полости, с закрепленной на его крышке прецизионной линейкой, а его поршень связан с кареткой, на которой с помощью переходных плит жестко закреплены двухсопловый струйный датчик и тормозные пневмоцилиндры, а устройство подготовки воздуха связано пневматическими линиями связи с входными каналами управляющего распределителя, двухпозиционным распределителем с электропневматическим управлением и двухпозиционным распределителем с пневматическим управлением, при этом управляющий распределитель работает с помощью шагового двигателя, на двух входах которого стоят глушители, а третий вход соединен пневматическими линиями связи с устройством подготовки воздуха, выходы из управляющего распределителя соединены со входами в дроссели с обратными клапанами, а выходы из дросселей с обратными клапанами соединены с напорной и сливной полостями безштокового пневмоцилиндра, двухпозиционный распределитель с электропневматическим управлением с помощью электромагнита, на одном из выходов которого стоит глушитель, а второй соединен пневматическими линиями связи с устройством подготовки воздуха, выход из двухпозиционного распределителя с электропневматическим управлением соединен с двухсопловым струйным датчиком и каналом, осуществляющим пневматическое управление двухпозиционным распределителем с пневматическим управлением, у которого на одном из выходов также стоит глушитель, а второй соединен пневматическими линиями связи с устройством подготовки воздуха, при этом выход из двухпозиционного распределителя с пневматическим управлением соединен с тормозными пневмоцилиндрами, выход из двухсоплового струйного датчика соединен со входами трехмембранного триггера, а выход из трехмембранного триггера соединен пневматической линией связи с датчиком давления, выход из датчика давления связан с помощью электрической линии связи с программируемым логическим контроллером, выход из которого соединен с электромагнитом двухпозиционного распределителя с электропневматическим управлением и соединен с шаговым двигателем, активирующим управляющий распределитель.
| СТРУЙНОЕ УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ ПРИВОДА ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2008 |
|
RU2352973C1 |
| ПНЕВМАТИЧЕСКОЕ ПРОГРАММНОЕ УСТРОЙСТВО | 2010 |
|
RU2427874C1 |
| СТРУЙНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПНЕВМОЦИЛИНДРОМ | 2007 |
|
RU2355011C2 |
| ПНЕВМАТИЧЕСКИЙ ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ПОРИСТОСТИ АБРАЗ.ИВНЫХ И ДРУГИХ ТВЕРДЫХ ИЗДЕЛИЙ | 0 |
|
SU165922A1 |
| Приспособление для шлифования бандажей железнодорожных колесных пар без выкатывания их | 1932 |
|
SU33420A1 |
| US 20040261608 A1, 30.12.2004 | |||
| US 4481768 A1, 13.11.1984. | |||
