1
Изобретение относится к машиностроению, в частности к промышленным работам, и может быть использовано в различных отраслях народного хозяйства при автоматизации пр сзводственшлс процессов.
известно устройство для поз.иционирования пневмопривода, содержацее пневмоцилиндр, шток которого соединен с датчиком обратной связи, которого подключен к блоку згщания програм ы, соединенному с входом распределителя , выходы которого подключв ны к полостям пневмоцилиндра, а в кор пусе пневмоцилиндра выполнена камера, в торцгис которой размещены упоры для позиционирования штока, в полости к меры установлены демпферы, между которыми на штоке установлена гидромуфта, привод которой подключен к выходу блока задания программы ij.
Позиционирование штока силового пневмоцилиндра осуществляется по сигналу с датчика связи, поступающему в блок задания прогрёиккы, которьШ в свою очередь подает сигнал на привод гидромуфты, включенная гидромуфта входит в зацепление со штормом пневмоцилиндра и дальнейшее их Совместное перемещение происходит
|с замедлением. Перемещение штока с {гидромуфтой на замедленной скорости, осуществляемое с помсмдью гемпфера, происходит до соприкосновения гидромуфты с упором корпуса демпфера.
Недостатком описанного устройства является невозможность получения близких друг к другу последовательно включаемых точек позиционирования,
10 обусловленнёи невысоким быстродействием процесса згщепления гидромуфты со штоком, что ограничивает технологические возможности.
15 Креме того, точность позиционирования данного устройства невысока.
; Наиболее близким к изобретению {является устройство для позиционирования пневмопривода, включающее блок программного управления и пневмоцилиндр роевого перемещения, в корпусе которого жестко закреплена втулка с продольшв4и пазами, а шток пневмоцй линдаа алполиен полыми снабжен зубцами, входящими в пазы втулки, внутри которой установлен шарнирно связаншлй с ксчрпусом цилиндра ходовой винт с приводньол устройством, несу30 цфий раздвижные у поры 2 .
В ходовом винте размещены трубки пневмопитания, которые прикреплены к раздвижным упорам.
Раздвижные упоры кинематически связаны с ходовым винтом и снабжены подвижно, установленными на них сухариками/ внутренние полости которых гидравлически соединены с трубками для пневмопитания. При подаче воздуха через трубки пневмопитания во внутренние полости сухариков последние перемещаются в радиальном направлении и входят в продольные пазы втулки.
Особенности работы устройства позиционирования привода заключаются в подаче пневмопитания при перемещении штока относительно ходового винта, несущего раздвижные упоры, под сухарики, которые после радиального перемещения взаимодействуют с зубцами штока, ограничивающими его перемещение.
Данное устройство обеспечивает высокую точность позиционирования, присущую жестким упорам, однако невозможно конструктивно обеспечить получение близких друг к другу последовательных точек позиционирования. Для получения нескольких точек позиционирования необходимо в устройстве иметь несколько раздвижных упоров, причем размеры этих упоров делают невозможным получение близких друг другу последовательных точек позиционирования,
Целью изобретения является расширение технологических возможностей путем получения близких друг к ДРУ гу последовательных точек позиционирования и упрощение конструкдаи путем использования одного раздвижного упора.
Поставленная цель достигается тем что известное устройство для позиционирования пневмопривода, включающее блок программного управления и пневмоцилиндр осевого перамаиения, в корпусе которого жестко аакреплена втулка с продольными пазами, а шток пневмоцилиндра выполнен полым и снабжен зубцами, вxoдящи м в пазы втулки, внутри которой установлен шарнирно связанный с корпусом цилиндра ходовой винт с приводным устройством, несущий раздвижные упоры, соглано изобретению снабжено тормозной гидромуфтой,, жестко закрепленной на корпусе пневмоцилиндра, пневмогидравлийеским усилителем и пневмоклапаном,-через которые привод гидромуфты подключен к выходу блока программного управления и датчиком положения упора, кинематически связанным с ходовым винтом и связанным электрически с блоком программного управления Раздвижной упор снабжен жестко свзанным с ним фиксатором. Входящим в продольный паз втулки.
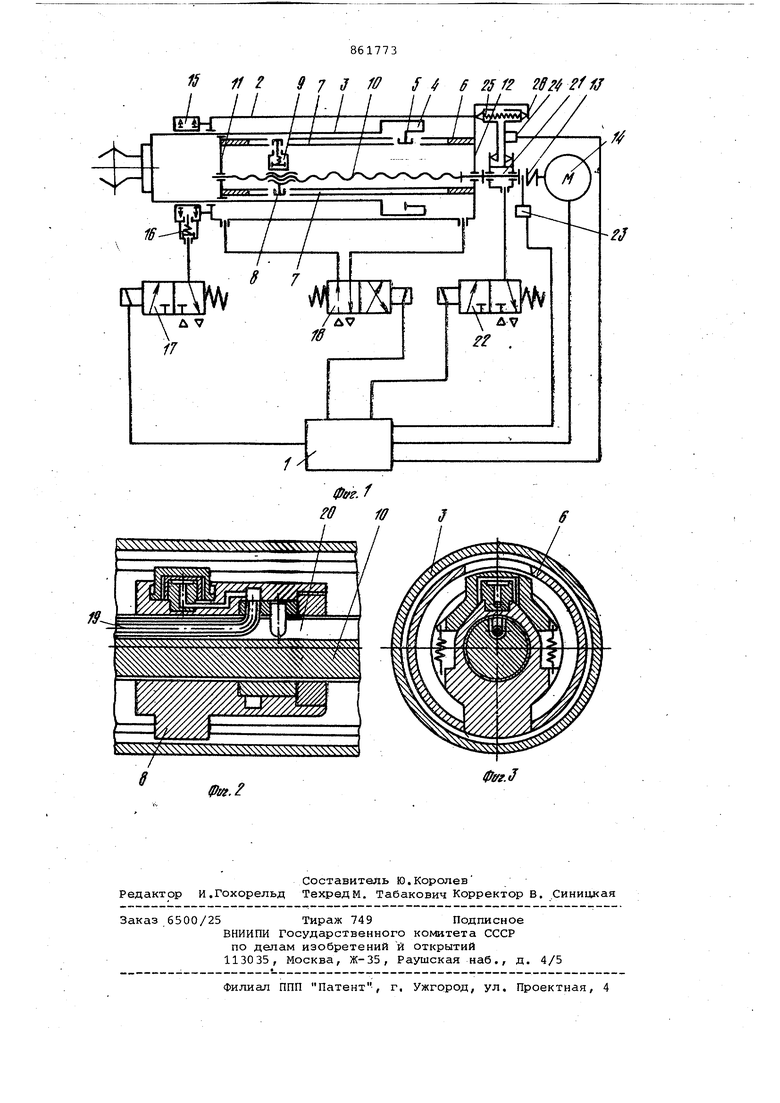
На фиг. 1 изображена схема устройства для позиционирования пневмопривода; на фиг. 2 - управляемьвй упор в продольном разрезе; на фиг. 3 то же, в поперечном разрезе.
Устройство содержит блок (фиг.1.) программного управления 1, пневмоцилиндр 2, внутри которогЬ смонтирован полый шток 3 с поршнем 4, несущим зубец 5. Внутри полого штока 3 соосно установлена втулка 6 с про-дольными пазами 7, с которыми взаимодействуют зубец 5 поршня 4, не позволяющий штоку 3 проворачиваться относительно пневмоцилиндра 2, и фикса.тор 8, удерживающий раздвижной упор 9 от проворота относительно втулки 6 при вращении винта 10, установленного в подшипниках 11 и 12. Выходной конец винта 10 через эластичную муфту 13 соединен с электродвигателем 14
Тормозная гидромуфта15, охватывающая шток 3 и жестко связанная с пневмоцилиндром 2, через пневмогидравлический усилитель. 16 соединена с пневмоклапаном 17. Рабочие полости пневмоцилиндра 2 соединяют с воздухораспределителем 18, а рабочая полость раздвижного упора 9 через трубку 19 (фиг. 2), находящуюся в пазу 20 винта 10, и пневмомуфту 21 соединена с пневмоклапаном 22. С целью контроля по перемещению раздвижного упора 9 устройство снабжено датчиком 23 положения упора, кинематически связанным с винтам 10, а с целью контроля положения штока 3 оно снабжено датчиком обратной связи 24, смонтированным в двустороннем демпфере 25, корпус 26 которого жестко связан с пневмоцилиндром 2. Электрические выходы пневмоклапанов 17 к 22, воздухораспределителя 18, электродвигателя 14 и датчиков 23 ii 24 соединены с блоком программного управления 1.
Работает устройство следующим образом.
От блока программного управления 1 подается сигнал на воздухораспределитель 18, и шток 3 начинает движение в заданном направлении. Перемещение штока 3 на максимальной скорости происходит до соприкосновения зубца. 5 поршня 4 с предварительно включенным от блока программного управле|ния 1 раздвижным упором 9, после чего происходит плавное замедление шггока с помощью продольного смещения винта 10, кинематически связанного с демпфером 25, и его остановка. Перемещение штока 3 из данной позиции в новую производится после предварительной автоматической установки раздвижного упора 9 в заданную позицию, при этом шток 3 удерживается в данной позиции, с помощью гидромуфты 15, включаемой после его полной остановки.. Автоматическая установка раздвижного упора 9 в новую позицию осуществляется с помощью электродвигателя 14 вращением винта 10, при этом упор, удерживаемый от проворота относительно втулки 6 фиксаторов 8, пе ремещается в заданном направлении. По сигналу с датчика положения упора 23, .фиксирукхцего выход упора 9 в заданное положение, останавливается электродвигатель 14. При необходимости (если изменшюсь направление перемещения штока 3) переключается воздухораспределитель 18, затем упор 9 должен быть выведен с другой стсфоны зубца 5 поршня 4. Для этого необходимо вращением винта 10 упор 9 отвести от зубца 5, снять с ynqpa пневмопитание и, врсвцгш винт в обратную сторону, вывести упор в требуемое положение и вновь включить
Затем отключается,тормозная гидромуфта 15 и шток 3 перемещается в направлении сближения зубца 5 поршня 4 с упором 9. После остановки шток 3 вновь 4н1ксируется тормозной гидромуфтой 15, а в блок программного управления 1 поступает сигнал с датчика обратной связи 24, фиксирук%аего выход штока 3 в заданное положение
Предлагаемое устройство благощаря наличию тормозной гидромуфты и использованию одного раздвижного упора для любой точки позиционирования позволяет получить близкие друг к другу последовательно включаемое точки, что расширяет технологичес кие возможности устройства по сравнению с прототипом,
того, описываемое устройство имеет высокую точность позиционирования , присущую жестким упсфам, оно позволяет при наличии одного раздвижного упора получить любое число точек позиционирования.
Формула изобретения
1. Устройство для -позиционирования пневмопривода, включающее блок программного управления и пневмоцилиндр осевого перемещения, в корпусе которого жестко закреплена втулка с продольными пазами, а шток пневмоцилиндра выполнен полым и снабжен зубцами, входящими в пазы втулки, внутри котс% ой установлен шарнирно
0 связанный с корпусом пнёЪмоцилиндра ходовой винт с приводным устройством, несущий рг1эдвижные упоры, отличающееся тем, что, с целью расширения технологических возможностей
5 путем получения близких друг к другу . последовательных точек позиционирования и упрощения конструкции путем использования одного раздвижного упора, устройство снабжено тормозной гидро0муфтой, жестко закрепленной на кс рпусе пневмоцилиндра, пневмогидравлическим усилителем и пневмоклапаном, через привод гидромуфты подключен к выходу блока программного управления, и датчиком положения упо5ра, кинематически связанным с ходовым винтом и подключенным к блоку програм много управления.
2ё Устройство по п.1, о т л и ч аю щ е е с я тем, что раздвижной упсчр
0 снабжен жестко связанным с ним фиксатс ом, входящим в продольный паз BTyjj ки.
Источники информации/
5
Гинятые во внимание при экспертизе 1. Авторское свидетельство СССР 595703, кл. G 05 В 11/18, 1976.
2, Авторское свидетельство СССР 503711, кл. Ъ 25 3 9/00, 1974
0 Сгфототип) . 1 11 2 9 7 3 fO S 4 11/ /./ / // гг./ 6 25 f2 2вг 2ffJ /nb
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционирования пневмопривода | 1980 |
|
SU928303A1 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Позиционер | 1986 |
|
SU1388831A1 |
| Устройство для позиционирования пневмопривода | 1977 |
|
SU734609A1 |
| СТАНОК ШЛИФОВАЛЬНЫЙ ШИРОКОЛЕНТОЧНЫЙ | 2001 |
|
RU2182073C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ | 2021 |
|
RU2767676C1 |
| Пневматический позиционер | 1984 |
|
SU1252753A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД СО СТРУЙНЫМ ДВИГАТЕЛЕМ ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ ГАЗО-, НЕФТЕ- И ПРОДУКТОПРОВОДОВ, КУЛИСНО-ВИНТОВОЙ ПОВОРОТНЫЙ МЕХАНИЗМ, ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, ПНЕВМОКЛАПАН | 2007 |
|
RU2348837C2 |
| Устройство для позиционирования пневмопривода | 1976 |
|
SU595703A1 |