1. ОБЛАСТЬ ТЕХНИКИ
[001] Настоящее изобретение в целом относится к робототехнике, а в частности, к изолированной рабочей платформе для людей для стабилизированного размещения коллаборативной робототехники.
2. УРОВЕНЬ ТЕХНИКИ
[002] Производители летательных аппаратов обычно основывают автоматизированный процесс сборки агрегата фюзеляжа на использовании производственной ячейки. Обычная производственная ячейка включает в себя рабочий стенд и один или более фиксирующих ложементов для удержания и размещения агрегата фюзеляжа.
[003] В настоящее время снаружи агрегата фюзеляжа используются роботы, которые также выполняют часть работ внутри агрегата фюзеляжа. Однако желательно увеличить использование роботов внутри агрегата фюзеляжа и при этом обеспечить безопасный доступ для людей, когда роботы работают в пределах агрегата фюзеляжа.
[004] Однако платформы, используемые внутри агрегата фюзеляжа, не являются изолированными, и поэтому рабочие органы роботов внутри агрегата фюзеляжа могут отскочить или испытать иное воздействие вследствие перемещения платформы, вызываемого движением человека или машины поблизости, что приводит к тому, что рабочие органы роботов оказываются в неправильном месте или положении.
[005] Таким образом, существует потребность в создании рабочей платформы, которая обеспечивает возможность безопасной работы людей внутри агрегата фюзеляжа и которая обеспечивает изолированную поддержку для двигающихся людей и машин без сообщения этого движения роботам, работающим внутри агрегата фюзеляжа.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[006] Для преодоления описанных выше ограничений, существующих в уровне техники, а также для преодоления других ограничений, которые станут очевидными после прочтения и понимания настоящего описания, раскрытие настоящего изобретения представляет способ и устройство для размещения роботов с использованием траверсы.
[007] Обеспечивают базовую платформу, а рабочую платформу размещают над базовой платформой для поддержки одного или более человек. Один или более роботов поддерживаются на базовой платформе независимо от рабочей платформы. По меньшей мере одна траверса размещена над базовой платформой и возле рабочей платформы для поддержки и размещения роботов вдоль рабочей платформы.
[008] Далее настоящее изобретение будет подробно рассмотрено со ссылкой на последующее описание и фигуры чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[009] Далее сделана ссылка на фигуры чертежей, на которых одинаковые ссылочные номера обозначают соответствующие части:
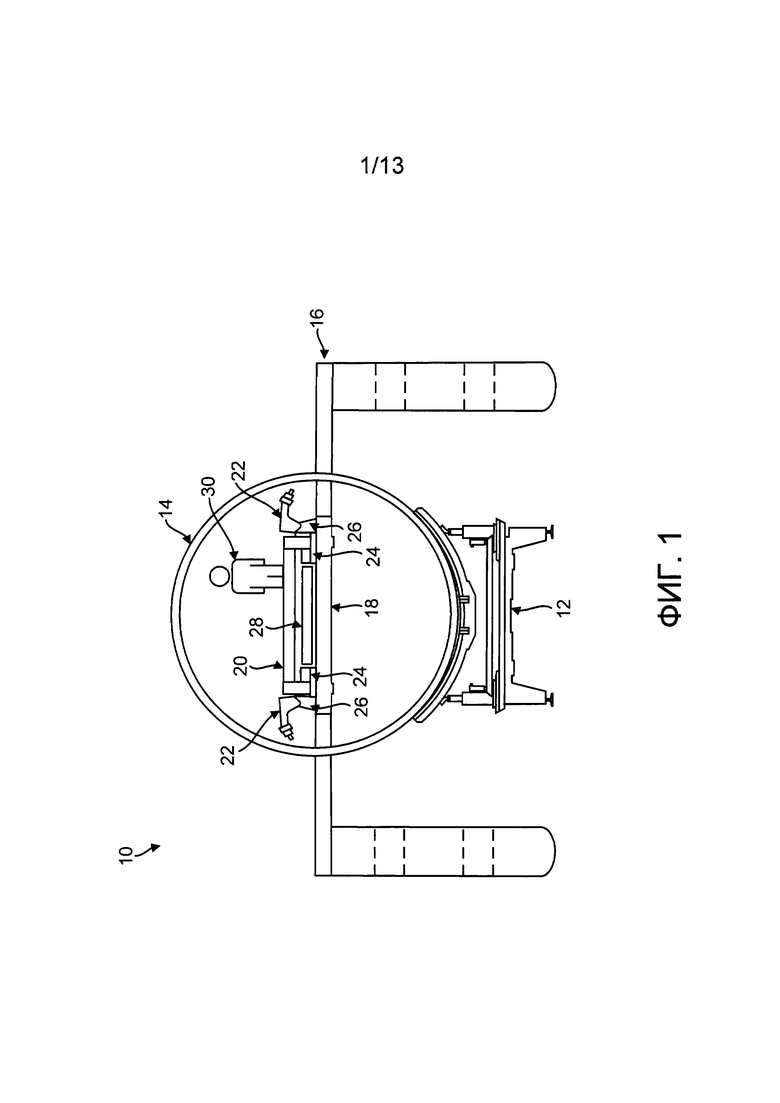
[0010] На ФИГ. 1 показана схема компоновки обычной производственной ячейки для сборки фюзеляжа летательного аппарата.
[0011] На ФИГ. 2А и 2В показаны перспективные виды сбоку и сверху схемы компоновки производственной ячейки.
[0012] На ФИГ. 3А и 3В подробно показана конфигурация рабочей платформы, при этом на ФИГ. 3А показан перспективный вид сбоку рабочей платформы, а на ФИГ. 3В показан вид снизу рабочей платформы, иллюстрирующий нижнюю сторону.
[0013] На ФИГ. 4А, 4В и 4С подробно показана конфигурация рабочей платформы, роботов, траверс и кабеленесущей системы, при этом на ФИГ. 4А показан перспективный вид сбоку рабочей платформы, роботов и траверс; на ФИГ. 4В показан вид сверху рабочей платформы, роботов и траверс; а на ФИГ. 4С показан вид снизу рабочей платформы, роботов, траверс и кабеленесущей системы, иллюстрирующий их нижнюю сторону.
[0014] На ФИГ. 5 показан вид в разрезе рабочей платформы, размещенной над базовой платформой, причем показана только половина рабочей платформы.
[0015] На ФИГ. 6 представлен вид, на котором рабочая платформа удалена, а оставлены только траверсы, кабеленесущая система, отдельные опорные стойки и роботы.
[0016] На ФИГ. 7 показан еще один вид траверсы с одной стороны рабочей платформы, а также отдельных опорных стоек, прикрепленных к траверсе, без показа роботов.
[0017] На ФИГ. 8 представлен еще один вид траверсы с одной стороны рабочей платформы, а также отдельных опорных стоек, прикрепленных к траверсе, подробно иллюстрирующий двойные приводные ремни.
[0018] На ФИГ. 9 показаны этапы способа изготовления и технического обслуживания летательного аппарата.
[0019] На ФИГ. 10 показан летательный аппарат и его компоненты.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ.
[0020] В приведенном ниже описании приведены ссылки на прилагаемые чертежи, которые являются частью настоящего описания и на которых в иллюстративных целях показан конкретный пример, которым может быть реализовано представленное раскрытие. Следует понимать, что могут быть использованы другие примеры, и могут быть выполнены конструктивные изменения без выхода за пределы объема раскрытия настоящего изобретения.
[0021] На ФИГ. 1 схематично показана компоновка обычной производственной ячейки 10, которая включает в себя один или более фиксирующих ложементов 12 для удержания и размещения агрегата 14 фюзеляжа летательного аппарата. В настоящее время роботы используются снаружи агрегата 14 фюзеляжа, и часть работы внутри агрегата 14 фюзеляжа также выполняется роботами. Однако существует необходимость в создании устройства для стабилизированного размещения коллаборативной робототехники внутри агрегата 14 фюзеляжа.
[0022] Согласно раскрытию настоящего изобретения агрегат 14 фюзеляжа размещен возле рабочего стенда 16, который включает в себя базовую платформу 18, размещенную внутри агрегата 14 фюзеляжа. (Некоторые опорные конструкции для рабочего стенда 16 на этом виде не показаны, чтобы не загромождать чертеж). Базовая платформа 18 имеет независимую поддержку в пределах агрегата 14 фюзеляжа, реализуемую рабочим стендом 16.
[0023] Рабочая платформа 20, которая представляет собой изолированную подвижную платформу, размещена относительно базовой платформы 18. Рабочая платформа 20 может быть размещена над базовой платформой 18.
[0024] Один или более роботов 22 размещены внутри агрегата 14 фюзеляжа и поддерживаются на базовой платформе 18 независимо от рабочей платформы 20, так что любое перемещение рабочей платформы 20, например изгибание или тряска вследствие перемещения на рабочей платформы 20, не влияет на положение роботов 22 или базовой платформы 18.
[0025] Роботы 22 поддерживаются независимо от рабочей платформы 20 на траверсах 24, размещенных по обеим сторонам рабочей платформы 20. Траверсы 24 установлены на базовой платформе 18 и поддерживаются независимо от рабочей платформы 20. Траверсы 24, размещенные над базовой платформой 18 и под рабочей платформой 20, используются для размещения роботов 22 по длине рабочей платформы 20. Роботы 22 расположены на отдельных опорных стойках 26, установленных на траверсах 24.
[0026] Посредством кабеленесущей системы 28 к роботам 22 поданы средства питания, управления и связи, а также подачи и возврата деталей. Кабеленесущая система 28 размещена на базовой платформе 18 или над базовой платформой 18 и под рабочей платформой 20 с созданием компактного решения для обеспечения подвода к роботам 22.
[0027] Рабочая платформа 20 имеет высоту профиля над базовой платформой 18 внутри агрегата 14 фюзеляжа. Эта высота профиля обеспечивает людям 30, стоящим на рабочей платформе 20, возможность доступа внутрь агрегата 14 фюзеляжа. Высота профиля может составлять 12 дюймов (30,48 см) или менее, хотя в других вариантах реализации высота профиля может составлять более 12 дюймов (30,48 см).
[0028] При этом рабочая платформа 20 устанавливает людей 30 на правильной высоте для простого достижения областей выполнения работ в агрегате 14 фюзеляжа. Кроме того, агрегат 14 фюзеляжа может быть повернут, так что люди 30 могут достигать верхней или нижней областей выполнения работ в агрегате 14 фюзеляжа. В одном примере при работе людей 30 в агрегате 14 фюзеляжа лестницы не нужны.
[0029] Роботы 22 и отдельные опорные стойки 26 размещены на траверсах 24 немного выше базовой платформы 18 и проходят над рабочей платформой 20 до высоты, необходимой для размещения роботов 22 для оптимального охвата в пределах рабочей области. Роботы 22 и отдельные опорные стойки 26 могут иметь общую высоту приблизительно 30 дюймов (76,2 см), что приблизительно на 18 дюймов (45,72 см) превышает 12-дюймовую (30,48 см) высоту рабочей платформы 20, хотя в других вариантах реализации они могут иметь общую высоту, которая меньше или больше 30 дюймов (76,2 см).
[0030] Базовая платформа 18 и рабочая платформа 20 вместе обеспечивают коллаборативное рабочее пространство для роботов 22 и людей 30 в пределах агрегата 14 фюзеляжа. Рабочая платформа 20 изолирована от роботов 22 для стабилизированного размещения роботов 22. В частности, рабочая платформа 20 обеспечивает изолированную опору для перемещения на ней без сообщения какого-либо движения роботам 22, в результате чего не допускаются ошибки размещения, вызываемые изгибанием, вибрациями или колебаниями высоты рабочей платформы 20 вследствие перемещения рабочей платформы 20.
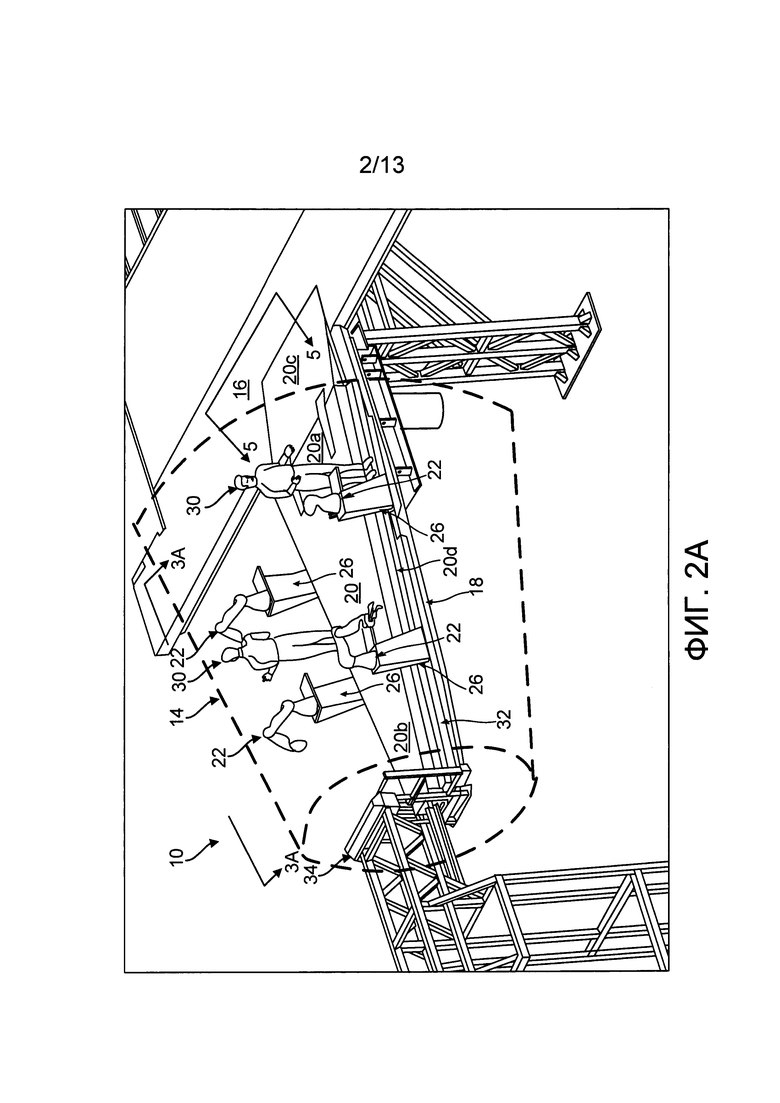
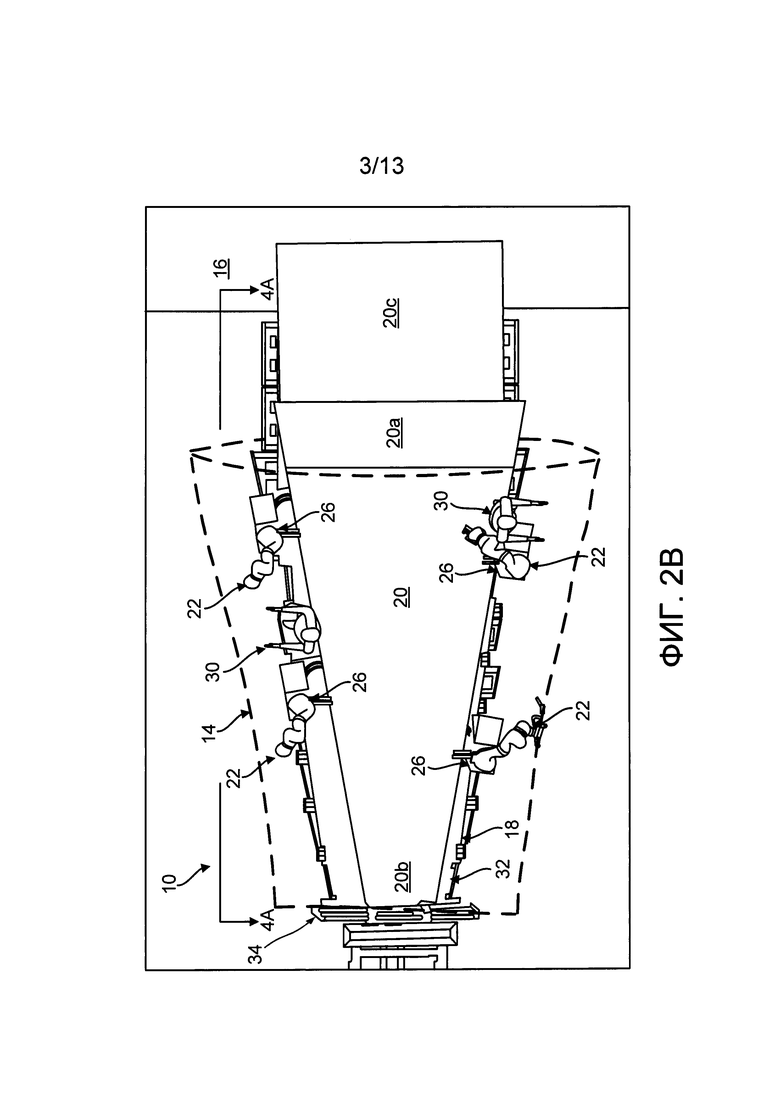
[0031] На ФИГ. 2А и 2В показаны перспективные виды сбоку и сверху схемы компоновки производственной ячейки 10, соответственно, при этом фиксирующий ложемент 12 и агрегат 14 фюзеляжа не показаны, а форма и положение агрегата 14 фюзеляжа обозначены пунктирными линиями. На этих фигурах показан рабочий стенд 16, размещенный на одном конце агрегата 14 фюзеляжа, для независимой поддержки базовой платформы 18, а также рабочей платформы 20, обе из которых находятся в подвешенном состоянии в пределах агрегата 14 фюзеляжа.
[0032] На этих видах показано устройство для поддержки четырех коллаборативных роботов 22 и людей 30 в сужающейся рабочей области, например задней/хвостовой секции и носовой секции агрегата 14 фюзеляжа. В частности, рабочая платформа 20 может быть уже, чем базовая платформа 18. Рабочая платформа 20 размещена относительно базовой платформы 18 для обеспечения областей 32 для перемещения или размещения роботов 22 и отдельных опорных стоек 26, а также людей 30 на одной или более сторонах рабочей платформы 20.
[0033] Рабочая платформа 20 имеет такое переменное сечение вдоль своей длины, которое соответствует сужающемуся агрегату 14 фюзеляжа, при этом передний конец 20а шире заднего конца 20b. Передний конец 20а рабочей платформы 20 размещен на переднем конце агрегата 14 фюзеляжа, а задний конец 20b рабочей платформы 20 размещен на заднем конце агрегата 14 фюзеляжа.
[0034] Имеющая переменное сечение конфигурация рабочей платформы 20 используется для открытия областей 32 базовой платформы 18, достаточных для обеспечения для роботов 22 и людей 30 возможности прохода базовой платформы 18 и маневрирования на рабочей платформе 20 в течение времени, когда необходимо обслуживать или проверять роботов 22, находящихся в своих положениях. Эта конфигурация переменного сечения также позволяет использовать одних и тех же роботов 22 для имеющих переменное сечение, а также цилиндрических секций агрегата 14 фюзеляжа.
[0035] Рабочая платформа 20 может иметь прямую конфигурацию, а не конфигурацию переменного сечения. Эта прямая конфигурация может быть использована для цилиндрических секций агрегата 14 фюзеляжа.
[0036] Когда агрегат 14 фюзеляжа находится в необходимом положении, опора 34 конца платформы размещена на заднем конце 20b рабочей платформы 20 и зацепляется с ним для закрепления положения рабочей платформы 20. Опора 34 конца платформы может содержать конструкцию, которая поддерживается независимо от рабочего стенда 16 и базовой платформы 18.
[0037] Рабочая платформа 20 также включает в себя наклонную часть 20 с возле переднего конца 20а, которая закреплена на протяжении базовой платформы 18 и рабочего стенда 16, при этом наклонной частью 20 с обеспечен доступ к рабочей платформе 20 для человека 30 и инструментальной тележки. Кроме того, вдоль одной из сторон (или обеих сторон) рабочей платформы 20 выполнен выступ 20d, на котором могут стоять люди 30.
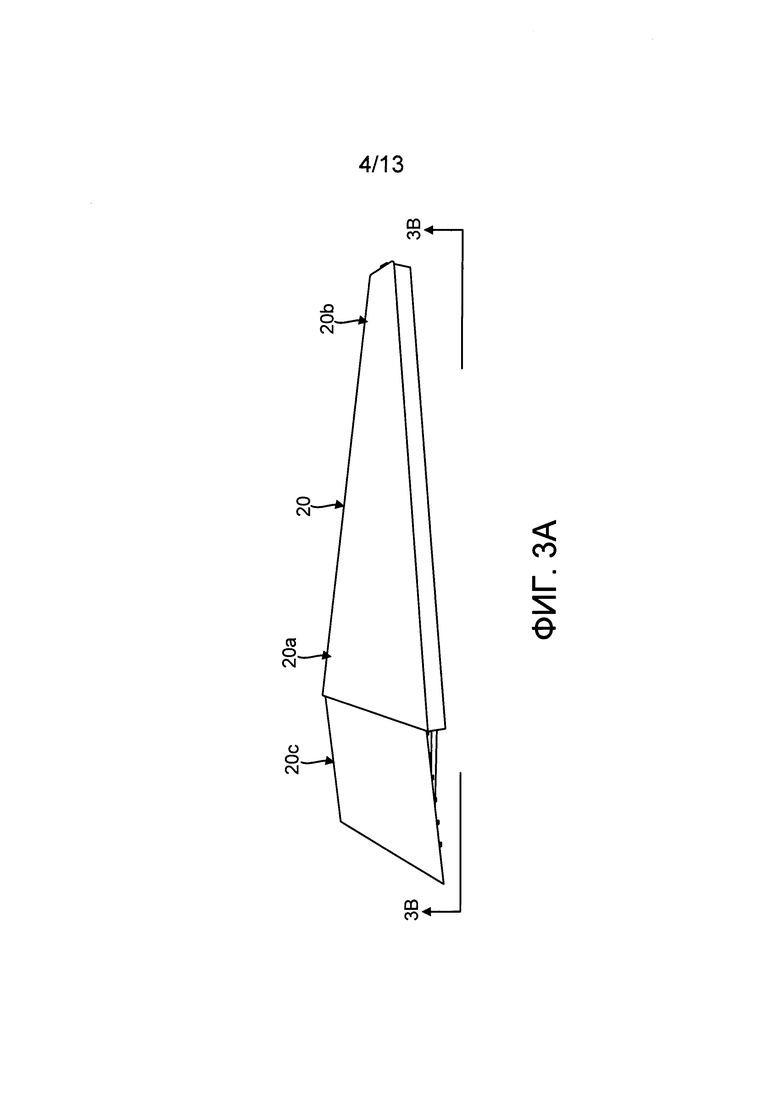
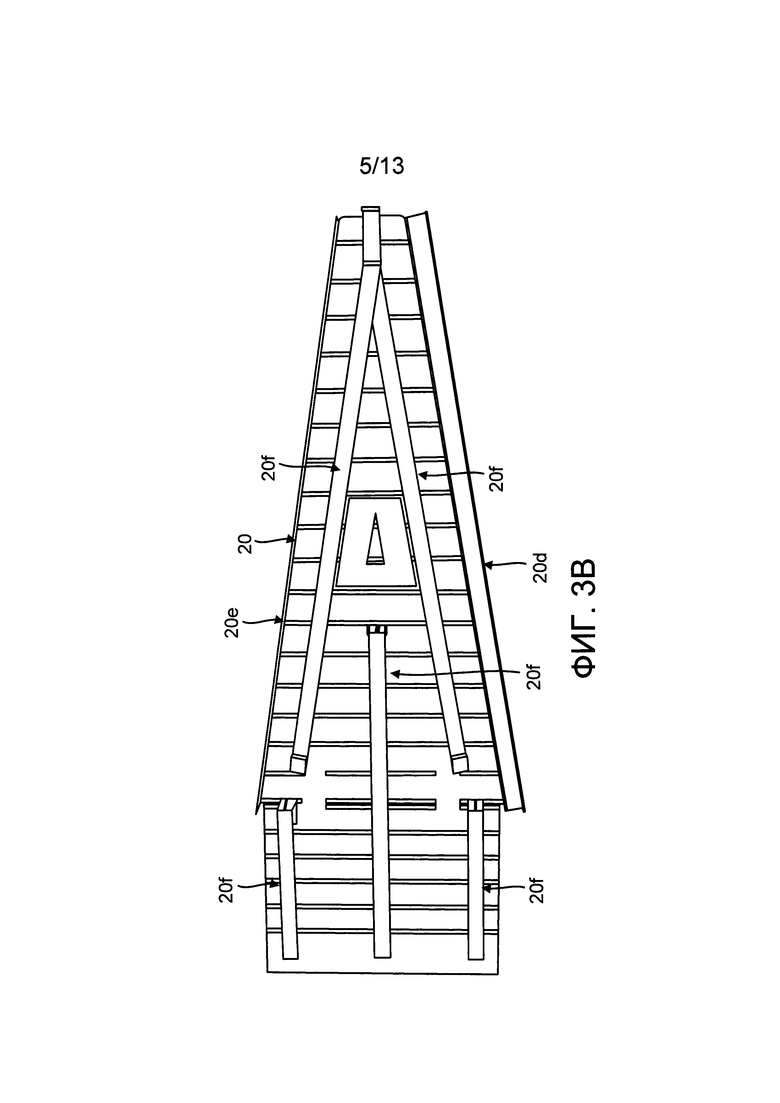
[0038] На ФИГ. 3А и 3В подробно показана конфигурация рабочей платформы 20. На ФИГ. 3А показан перспективный вид сбоку рабочей платформы 20, выполненный по линии 3А-3А по ФИГ. 2А, если смотреть в направлении стрелок; а на ФИГ. 3В показан вид снизу рабочей платформы 20, иллюстрирующий нижнюю сторону, выполненный по линии 3В-3В по ФИГ. 3А, если смотреть в направлении стрелок.
[0039] Сечение рабочей платформы 20 может иметь переменную конфигурацию, имеющую более широкую часть 20а (передний конец 20а) на переднем конце рабочей платформы 20 и суженую часть 20b (задний конец 20b) на заднем конце рабочей платформы 20. Рабочая платформа 20 также включает в себя наклонную часть 20с, примыкающую к переднему концу 20а, которая проходит под углом вниз от рабочей платформы 20 с размещением на базовой платформе 18 (не показано) или над ней.
[0040] Кроме того, рабочая платформа 20 имеет плоскую верхнюю поверхность 20а, 20b, 20с, как показано на ФИГ. 3А, и ребристую нижнюю поверхность 20е с продольными опорами 20f, как показано на ФИГ. 3В. На ФИГ. 3b также показана нижняя сторона выступа 20d рабочей платформы 20.
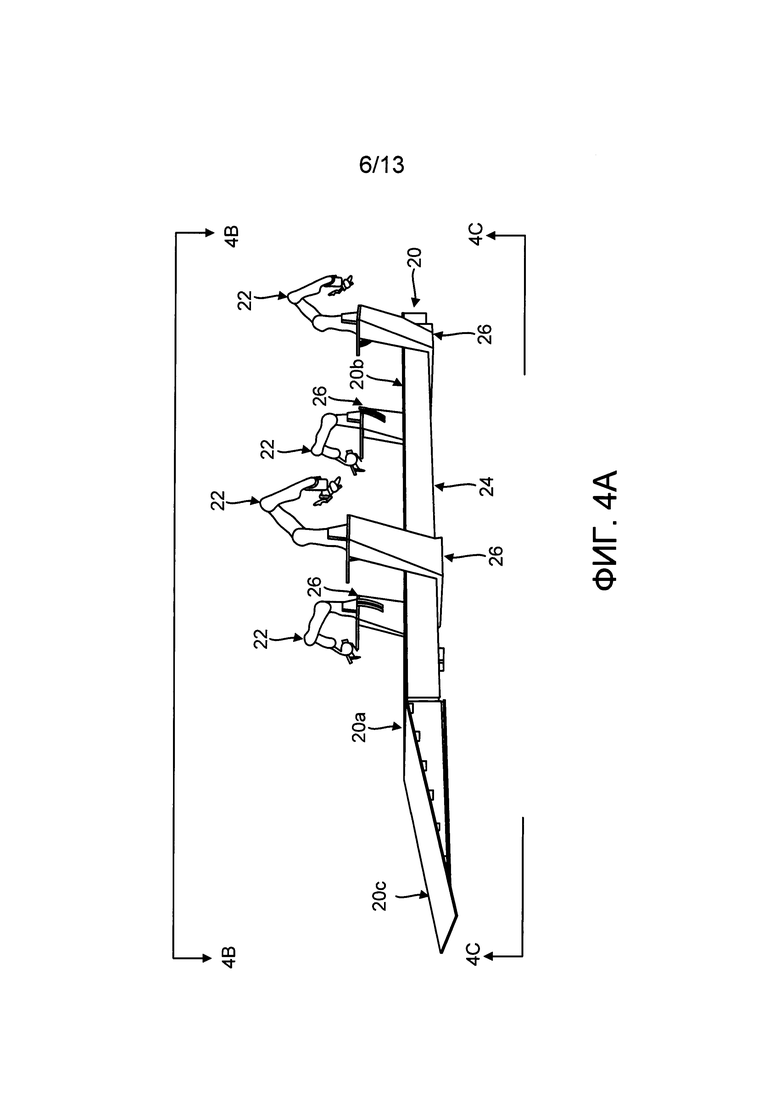
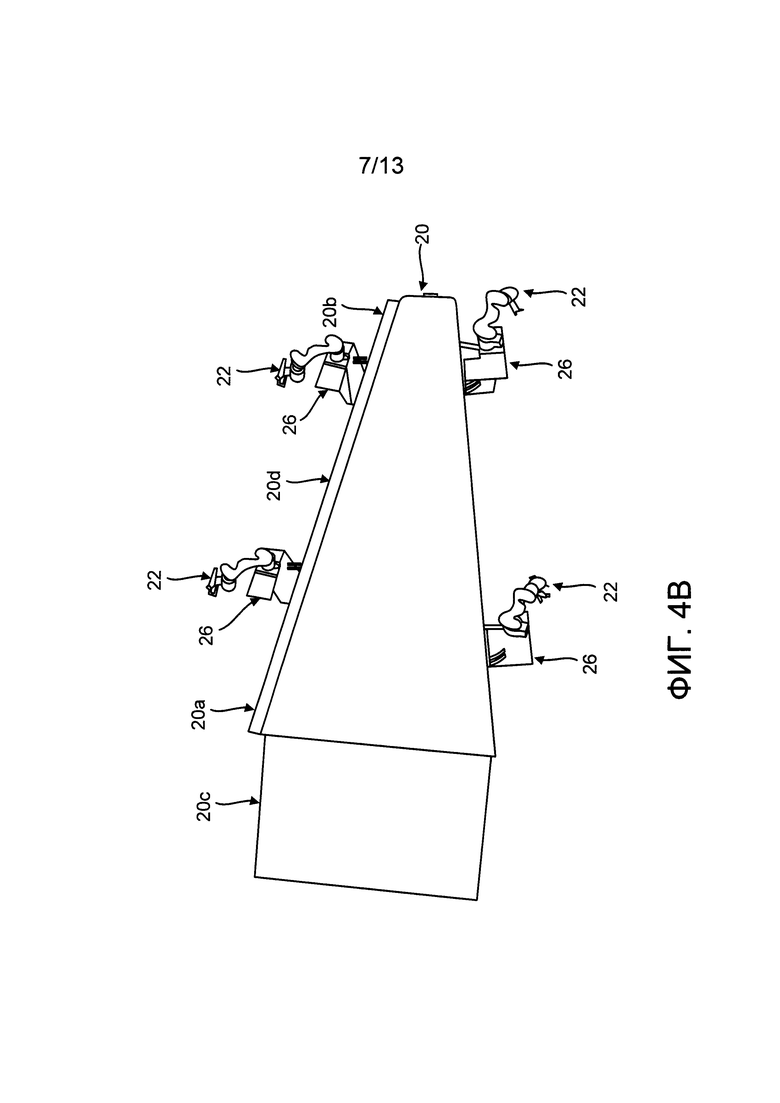
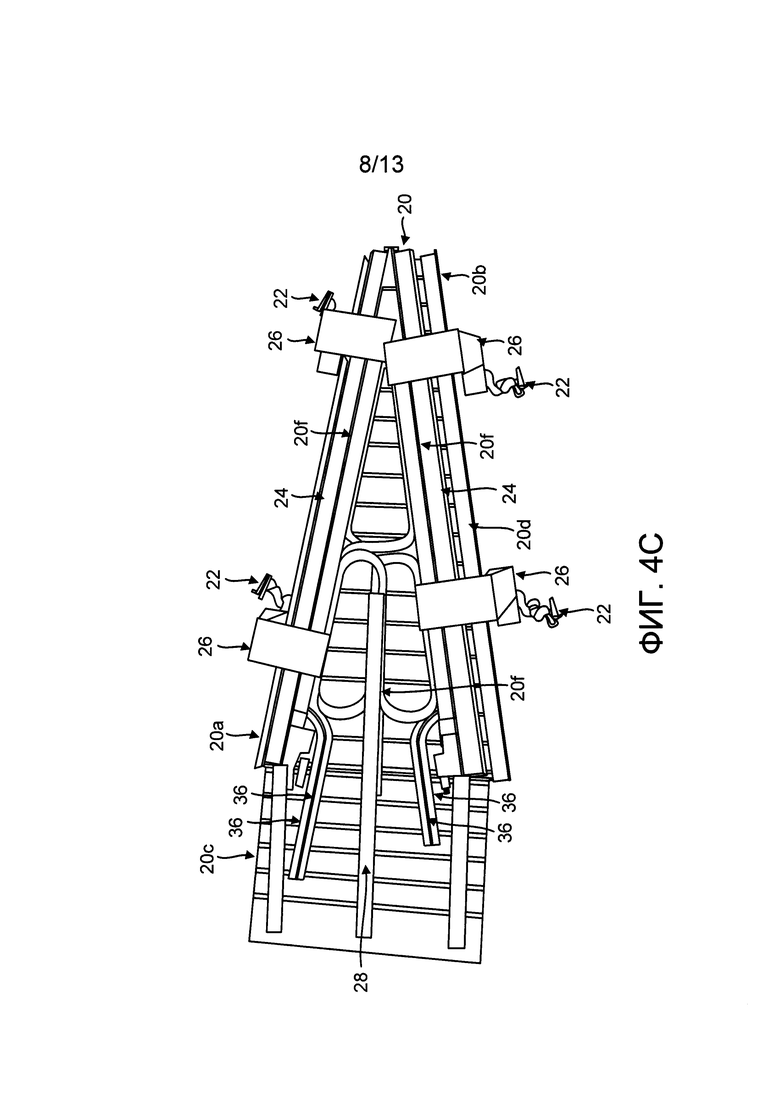
[0041] На ФИГ. 4А, 4В и 4С подробно показана конфигурация рабочей платформы 20, роботов 22, траверс 24, отдельных опорных стоек 26 и кабеленесущей системы 28. На ФИГ. 4А показан перспективный вид сбоку рабочей платформы 20 (включающей себя передний конец 20а, задний конец 20b и наклонную часть 20с), роботов 22, траверс 24 и отдельных опорных стоек 26, выполненный по линии 4А-4А по ФИГ. 2В, если смотреть в направлении стрелок; на ФИГ. 4В показан вид сверху рабочей платформы 20 (включающей себя передний конец 20а, задний конец 20b, наклонную часть 20 с и выступ 20d), роботов 22, траверс 24 и отдельных опорных стоек 26, выполненный по линии 4В-4В по ФИГ. 4А, если смотреть в направлении стрелок; и на ФИГ. 4С показан вид снизу рабочей платформы 20 (включающей себя передний конец 20а, задний конец 20b, наклонную часть 20 с, выступ 20d и опоры 20f), роботов 22, траверс 24, отдельные опорные стойки 26 и кабеленесущую систему 28, выполненный по линии 4С-4С по ФИГ. 4А, если смотреть в направлении стрелок.
[0042] Могут быть выполнены отдельные траверсы 24 на каждой стороне рабочей платформы 20. Каждый из роботов 22 расположен на отдельной опорной стойке 26, прикрепленной к своим соответствующим траверсам 24. Роботы 22 и отдельные опорные стойки 26 полностью поддерживаются траверсами 24, которые в свою очередь поддерживаются базовой платформой 18 (не показано) и на которые не влияет перемещение рабочей платформы 20.
[0043] При конструировании траверс 24 решалась задача независимого размещения двух роботов 22 на каждой стороне рабочей платформы 20 с использованием только одной траверсы 24. Существующие системы обеспечивают возможность размещения только одного робота вдоль траверсы 24. Одна траверса 24 может обеспечивать возможность независимого управления приведения в движение двух роботов 22 на одной стороне рабочей платформы 20 с перемещением их в соответствующие конкретные местоположения с высокой точностью.
[0044] Каждый из двух роботов 22 на одной стороне рабочей платформы 20 перемещается в боковом направлении вдоль этой стороны рабочей платформы 20 посредством одной траверсы 24. В частности, траверса 24 обеспечивает возможность перемещения каждого из роботов 22 на существенную часть длины рабочей платформы 20 с одной стороны рабочей платформы 20, за исключением пространства, занятого другим роботом 22, а также пространства с противоположной стороны от другого робота 22.
[0045] Кабеленесущая система 28 может быть размещена по меньшей мере частично под рабочей платформой 20 и соответствует имеющей переменное сечение конфигурации рабочей платформы 20. Кабеленесущая система 28 обеспечивает комплект кабелей 36 для каждого из роботов 22. Хотя они показаны как отдельные элементы, каждый из кабелей 36 может содержать пучок кабелей питания, управления и связи, а также трубы подачи и возврата деталей.
[0046] Кабеленесущая система 28 выполнена с возможностью встраивания в рабочую платформу 20, однако может быть использована отдельно от нее. При конструировании кабеленесущей системы 28 не существовало подходящего решения для плотной укладки двух пар кабелей 36, которые обеспечивали бы работу четырех роботов 22 в сужающейся конфигурации переменного сечения, в пределах компактного пространства между базовой платформой 18 и рабочей платформой 20. Кабеленесущая система 28 обеспечивает реализацию уникального способа для плотной укладки пар кабелей 36, подаваемых к роботам 22, на каждой стороне рабочей платформы 20, при этом кабели 36 не создают помех друг другу, и обеспечивается полный диапазон движения.
[0047] Кроме того, продольные опоры 20f рабочей платформы 20 поддерживают по меньшей мере участки кабелей 36 над базовой платформой 18 для укладки кабелей 36 попарно, так что они не создают помех друг другу. В частности, верхний кабель 36 в паре поддерживается продольными опорами 20f над нижним кабелем 36 в указанной паре, что обеспечивает возможность скольжения верхнего кабеля 36 над нижним кабелем и нижнего кабеля 36 под верхним кабелем 36 без вступления кабелей 36 в контакт.
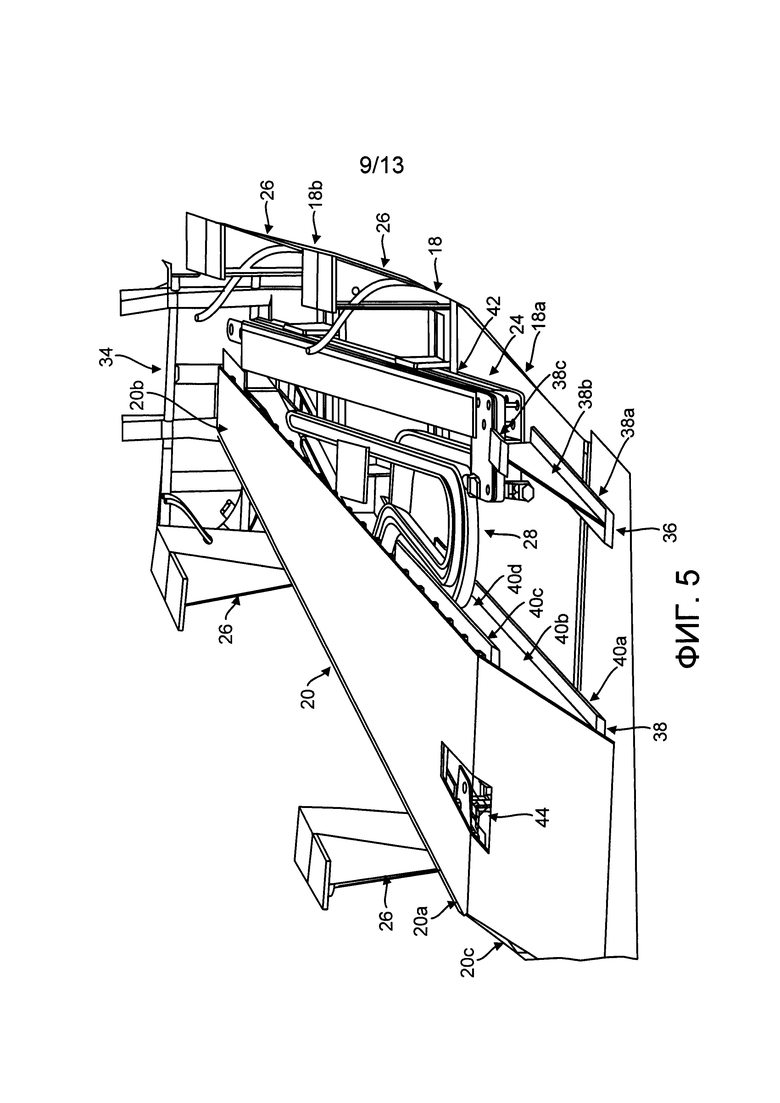
[0048] На ФИГ. 5 показан вид в разрезе рабочей платформы 20, размещенной над базовой платформой 18, причем показана только левая половина рабочей платформы 20 без правой половины рабочей платформы 20, а разрез выполнен по линии 5-5 по ФИГ. 2А, если смотреть в направлении стрелок.
[0049] Передний конец 20а рабочей платформы 20 установлен на одном или более подъемных элементах 38, 40, установленных на базовой платформе 18, а задний конец 20b рабочей платформы 20 размещен консольно над базовой платформой 18. Когда агрегат 14 фюзеляжа находится в необходимом положении, опора 34 конца платформы размещена на заднем конце 20b рабочей платформы 20 и зацепляется с ним для закрепления положения рабочей платформы 20.
[0050] Подъемный элемент 38 также является поддерживающей конструкцией, образованной нижней полкой 38а, треугольным вертикальным стеночным элементом 38b и верхней полкой 38с, причем треугольный вертикальный стеночный элемент 38b соединяет нижнюю полку 38а с верхней полкой 38 с. Нижняя полка 38а установлена на базовой платформе 18, а рабочая платформа 20 установлена на верхней полке 38с.
[0051] Схожим образом, подъемный элемент 40 является поддерживающей конструкцией, образованной нижней полкой 40а, треугольным вертикальным стеночным элементом 40b и верхней полкой 40с, причем треугольный вертикальный стеночный элемент 40b соединяет нижнюю полку 40а с верхней полкой 40с. Нижняя полка 40а установлена на базовой платформе 18, а рабочая платформа 20 установлена на верхней полке 40с.
[0052] Следует отметить, что показана только часть подъемного элемента 40 с удаленной правой половиной рабочей платформы 20, то есть показана приблизительно половина подъемного элемента 40, а остальная часть подъемного элемента 40 спрятана под левой половиной рабочей платформы 20. Следует отметить также, что под левой половиной рабочей платформы 20 спрятан еще один подъемный элемент 38, который размещен на противоположной стороне подъемного элемента 38, показанного на ФИГ. 5.
[0053] Наклонная часть 20с рабочей платформы 20 также установлена на подъемных элементах 38, 40, что обеспечивает легкий доступ с базовой платформы 18. Наклонная часть 20 с рабочей платформы 20 поддерживается на треугольном вертикальном стеночном элементе 38b или над ним. Наклонная часть 20 с рабочей платформы 20 также поддерживается на треугольном вертикальном стеночном элементе 40b или над ним.
[0054] Подъемные элементы 38, 40 для рабочей платформы 20 размещены на базовой платформе 18 таким образом, что они не создают помех траверсам 24 или кабеленесущей системе 28. Подъемные элементы 38, 40 обеспечивают возможность размещения траверсы 24 и кабеленесущей системы 28 между рабочей платформой 20 и базовой платформой 18.
[0055] Подъемный элемент 40 также может включать в себя опорную секцию 40d по меньшей мере для участков кабелей 36, размещенных посредине вертикального стеночного элемента 40b, для укладки кабелей 36 попарно, так что они не создают помех друг другу. В частности, верхний кабель 36 в паре поддерживается опорной секцией 40d над нижним кабелем 36 в указанной паре, что обеспечивает возможность скольжения верхнего кабеля 36 над нижним кабелем и нижнего кабеля 36 под верхним кабелем 36 без вступления кабелей 36 в контакт.
[0056] Как упомянуто выше, может быть выполнена одна траверса 24, размещаемая рядом с каждым внутренним краем рабочей платформы 20 для перемещения роботов 22 вдоль длины рабочей платформы 20. Траверса 24 выполнена из стальной основной опорной квадратной трубы 42, которая закреплена вблизи подъемного элемента 38 на одном конце, т.е. переднем конце 18а, базовой платформы 18, так что вес траверсы 24 поддерживается с переднего конца 18а базовой платформы 18. Оставшуюся часть стальной основной опорной квадратной трубы 42 размещают консольно над базовой платформой 18 по направлению к другому концу, т.е. заднему концу 18b, базовой платформы 18, так что траверса 24 изолирована от движения рабочей платформы 20. Затем стальную основную опорную квадратную трубу 42 соединяют с опорой 34 конца платформы на заднем конце 18b базовой платформы 18. На левой стороне рабочей платформы 20 имеется еще одна траверса 24, на зеркальном изображении показанной траверсы 24, но на этом виде закрыта рабочей платформой 20.
[0057] Рабочая платформа 20 также включает в себя одну или более съемных панелей 44 для доступа. В примере по ФИГ. 5 показана одна панель 44 для доступа в левую половину рабочей платформы 20, однако панель для доступа в правую половину рабочей платформы 20, которая не показана, будет размещена аналогично. Съемные панели 44 для доступа выполнены для обеспечения доступа к компонентам траверсы 24 и кабеленесущей системе 28 под рабочей платформой 20, например, для ремонта, установки и/или извлечения.
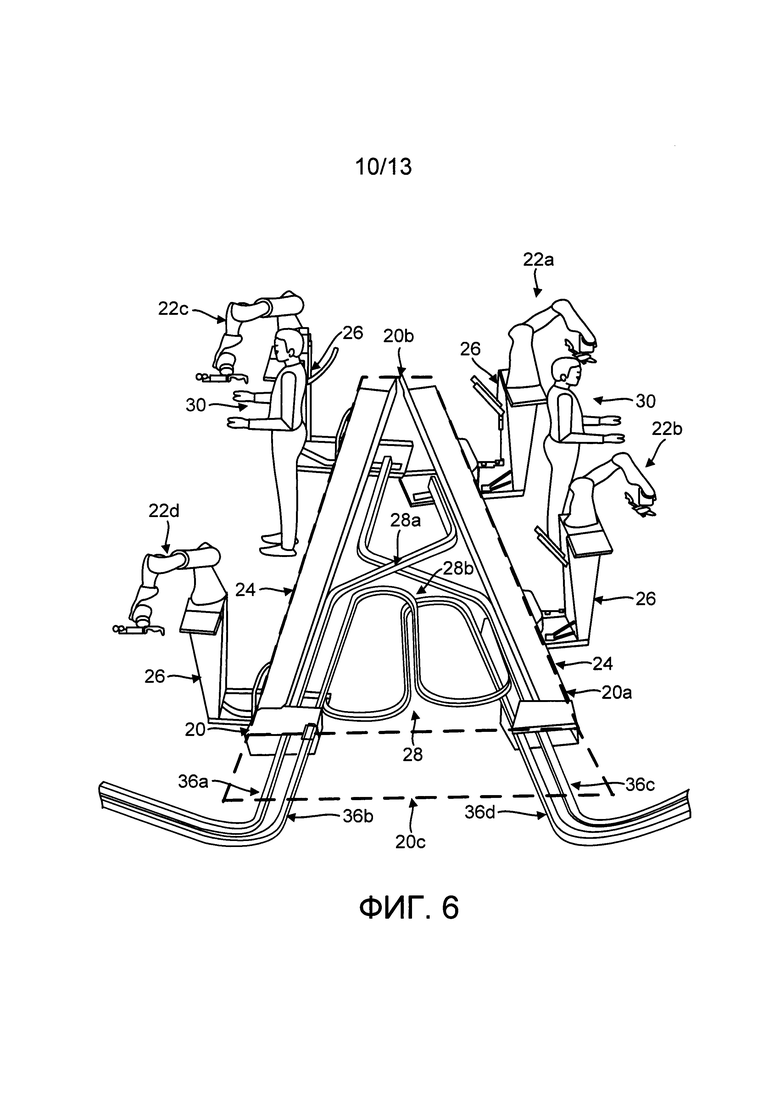
[0058] На ФИГ. 6 показан вид, на котором рабочая платформа 20 удалена, но ее контур обозначен пунктирными линиями, показаны только роботы 22, траверсы 24, отдельные опорные стойки 26 и кабеленесущая система 28.
[0059] Кабеленесущая система 28 поддерживает кабели 36а, 36b, 36с, 36d в конфигурации с пересечением в пространстве между базовой платформой 18 и рабочей платформой 20. В частности, кабеленесущая система 28 обеспечивает размещение четырех кабелей 36а, 36b, 36с, 36d для независимого подвода к четырем роботам 22а, 22b, 22с, 22d без создания помех друг другу с обеспечением полного диапазона движения для кабелей 36а, 36b, 36с, 36d.
[0060] Форма рабочей платформы 20 способствует направлению кабеленесущей системы 28. Кроме того, секции кабелей 36а и 36с закреплены в месте 28а, а секции кабелей 36b и 36d закреплены в месте 28b, где они пересекаются для поворота, что обеспечивает возможность прохождения кабелей 36а, 36b, 36с, 36d от минимального до максимального радиуса без соскальзывания с мест 28а, 28b закрепления с постоянным сохранением на месте нужного количества кабелей 36а, 36b, 36с, 36d. Закрепление кабелей 36а, 36b, 36с, 36d в местах 28а, 28b позволяет не допустить проскальзывания кабелей 36а, 36b, 36с, 36d назад через область пересечения и создания помех какому-либо противоположному комплекту кабелей 36а, 36b, 36с, 36d.
[0061] Кабели 36а, 36b или 36с, 36d для роботов 22а, 22b или 22с, 22d на первой стороне рабочей платформы 20 введены от второй стороны рабочей платформы 20 напротив первой стороны рабочей платформы 20 на первом конце рабочей платформы 20, и кабели 36а, 36b или 36с, 36d для роботов 22а, 22b или 22с, 22d на второй стороне рабочей платформы 20 введены от первой стороны рабочей платформы 20 напротив второй стороны рабочей платформы 20 на первом конце рабочей платформы 20. Например, кабели 36а, 36b для двух роботов 22а, 22b на правой стороне рабочей платформы 20 лежат на базовой платформе 18 и вводятся от левой стороны базовой платформы 18 на переднем конце 20а рабочей платформы 20. Кабели 36с, 36d для двух роботов 22с, 22d на левой стороне рабочей платформы 20 введены от правой стороны рабочей платформы 20 на переднем конце 20а рабочей платформы 20.
[0062] В кабеленесущей системе 28 кабели 36а, 36b, 36с, 36d размещены крест на крест для связи с роботами 22а, 22b, 22с, 22d, так что кабели 36а, 36b, 36с, 36d проходят от области возле переднего конца 20а на одной стороне рабочей платформы 20 к области возле заднего конца 20b и переднего конца 20а на противоположной стороне рабочей платформы 20. Например, кабель 36а соединен с роботом 22а; кабель 36b соединен с роботом 22b; кабель 36с соединен с роботом 22с; а кабель 36d соединен с роботом 22d. Кабели 36а и 36b проходят от области возле переднего конца 20а рабочей платформы 20 на левой стороне рабочей платформы 20 к области возле заднего конца 20b и переднего конца 20а рабочей платформы 20 на правой стороне рабочей платформы 20. Кабели 36с и 36d проходят от области возле переднего конца 20а рабочей платформы 20 на правой стороне рабочей платформы 20 к области возле заднего конца 20b и переднего конца 20а рабочей платформы 20 на левой стороне рабочей платформы 20.
[0063] Кабели 36а, 36b, 36с, 36d плотно уложены так, что первый из кабелей 36а, 36b или 36с, 36d выполнен с возможностью достижения любого местоположения позади (по направлению к заднему концу 20b) второго из кабелей 36b, 36а или 36d, 36с, а второй из кабелей 36а, 36b или 36с, 36d выполнен с возможностью достижения любого местоположения впереди (по направлению к переднему концу 20а) первого из указанных кабелей 36b, 36а или 36d, 36с. Например, кабели 36а, 36b плотно уложены так, что кабель 36а выполнен с возможностью достижения любого местоположения позади (по направлению к заднему концу 20b) кабеля 36b и кабель 36b выполнен с возможностью достижения любого местоположения впереди (по направлению к переднему концу 20а) кабеля 36а. Схожим образом, кабели 36с, 36d плотно уложены, так что кабель 36с выполнен с возможностью достижения любого местоположения позади (по направлению к заднему концу 20b) кабеля 36d, и кабель 36d выполнен с возможностью достижения любого местоположения впереди (по направлению к переднему концу 20а) кабеля 36с.
[0064] Кроме того, кабели 36а, 36b, 36с, 36d плотно уложены так, что на каждой стороне рабочей платформы 20 первый из роботов 22а, 22b, 22с, 22d может перемещаться по направлению к первому концу(20а или 20b) рабочей платформы 20, когда второй из роботов 22а, 22b, 22с, 22d перемещается по направлению ко второму концу (20b или 20а) рабочей платформы 20, и при этом кабели 36а, 36b, 36с, 36d не создают помех друг другу. Например, один робот 22а может перемещаться по направлению к переднему концу 20а рабочей платформы 20, а другой робот 22b перемещается по направлению к заднему концу 20b рабочей платформы 20, и при этом кабели 36а, 36b не создают помех друг другу; и один робот 22с может перемещаться по направлению к переднему концу 20а рабочей платформы 20, а другой робот 22d перемещается по направлению к заднему концу 20b рабочей платформы 20, и при этом кабели 36с, 36d не создают помех друг другу.
[0065] В ином случае может возникнуть проблема, связанная с ограничением возможного перемещения четырех роботов 22а, 22b, 22с, 22d. Существующие системы прокладки кабелей не обеспечивают плотной укладки в пересекающейся конфигурации для обеспечения прохождения на полную длину, необходимую для данной конфигурации. Кабеленесущая система 28 обеспечивает возможность подвода кабелей 38, 38b, 38с, 38d к роботам 22а, 22b, 22с, 22d в очень небольшом рабочем пространстве без создания помех друг другу.
[0066] На ФИГ. 7 показан еще один вид траверсы 24 с одной стороны рабочей платформы 20 (не показано), а также отдельные опорные стойки 26а, 26b, прикрепленные к траверсе 24, без показа роботов 22. При конструировании траверсы 24 решалась задача независимого размещения двух роботов 22 с использованием только одной траверсы 24. Существующие системы обеспечивают возможность размещения только одного робота вдоль траверсы. Данная система обеспечивает возможность независимого управления перемещением обоих роботов 22 к заданным местоположениям на одной траверсе 24 с высокой точностью.
[0067] Траверса 24 включает в себя множество приводных ремней 46а, 46b для независимого размещения отдельных опорных стоек 26а, 26b (и расположенных на них роботов 22). Может быть два ремня 46а, 46b, проходящих вдоль длины траверсы 24 и размещенных вертикально относительно друг друга. Верхний ремень 46а может приводить в движение заднюю отдельную опорную стойку 26а, и нижний ремень 46b может приводить в движение переднюю отдельную опорную стойку 26b, хотя в других вариантах реализации изобретения может быть наоборот.
[0068] Каждая из отдельных опорных стоек 26а, 26b с одной стороны рабочей платформы 20 перемещается в боковом направлении вдоль этой стороны рабочей платформы 20 посредством приводных ремней 46а, 46b. В частности, приводные ремни 46а, 46b обеспечивают возможность перемещения каждой из отдельных опорных стоек 26а, 26b по длине рабочей платформы 20, за исключением пространства, занятого другой отдельной опорной стойкой 26а, 26b, с одной стороны рабочей платформы 20.
[0069] Каждая из отдельных опорных стоек 26а, 26b включает в себя основание 48, которое проходит под основной опорной квадратной трубы 42 траверсы 24, для уравновешивания отдельной опорной стойки 26а, 26b (и расположенного на ней робота 22).
[0070] Основная опорная квадратная труба 42 образована двумя рельсовыми направляющими 50а, 50b, содержащими верхнюю рельсовую направляющую 50а и нижнюю рельсовую направляющую 50b. Каждая из отдельных опорных стоек 26а, 26b включает в себя держатель 52, крепящий основание 48 к рельсовым направляющим 50а, 50b траверсы 24 для обеспечения перемещения и поддержки отдельной опорной стойки 26а, 26b (и расположенного на ней робота 22).
[0071] Каждая из отдельных опорных стоек 26а, 26b проходит консольно от направляющих 50а, 50b, так что отдельная опорная стойка 26а, 26b (и расположенный на ней робот 22) поддерживаются с внутренней стороны траверсы 24, и вес отдельной опорной стойки 26а, 26b и роботов 22 не влияет ни на базовую платформу 18 во время размещения агрегата 14 фюзеляжа, ни на рабочую платформу 20.
[0072] Держатель 52 отдельных опорных стоек 26а, 26b также включает в себя один или более несущих блоков 54а, 54b, которые прикреплены к обоим концам одного из приводных ремней 46а, 46b. Механизм 56 натяжения ремней соединяет несущие блоки 54а, 54b и обеспечивает необходимое натяжение на приводном ремне 46а, 46b.
[0073] Кабели 36 для роботов 22 поддерживаются основанием 48 отдельной опорной стойки 26а, 26b и проложены через отверстие 58 в держателе 52 отдельной опорной стойки 26а, 26b к расположенному на ней роботу 22.
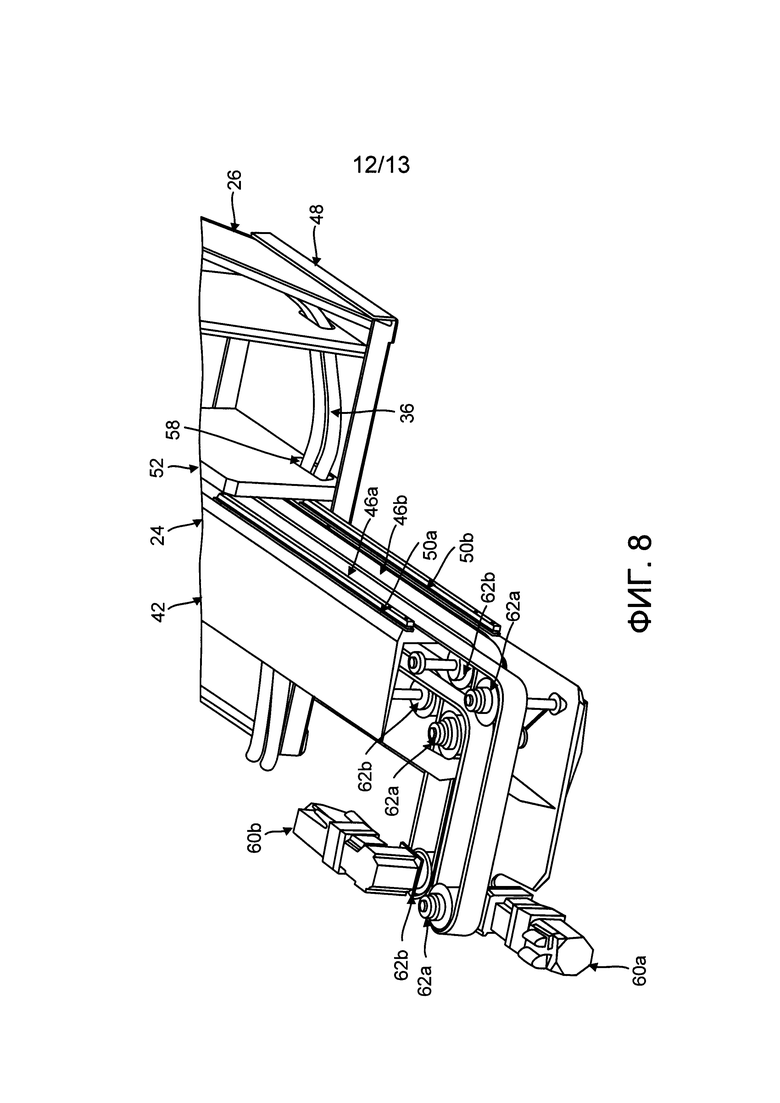
[0074] На ФИГ. 8 показан еще один вид траверсы 24 с одной стороны рабочей платформы 20, а также отдельных опорных стоек 26, прикрепленных к траверсе 24, с подробным показом двойных приводных ремней 46а, 46b.
[0075] Каждый из ремней 46а, 46b включает в себя двигатель 60а, 60b и один или более шкивов 62а, 62b. В частности, верхний ремень 46а приводится двигателем 60а шкива и обернут вокруг шкивов 62а, а нижний ремень 46b приводится двигателем 60b шкива и обернут вокруг шкивов 62b. Шкивы 62а, 62b используются так, что приводные двигатели 60а, 60b размещены вблизи переднего конца рабочей платформы 20 для простого доступа через панели 44 доступа, чтобы произвести техническое обслуживание. Сходные конфигурации шкивов 62а, 62b размещены на другом конце траверсы 24, но без двигателей 60а, 60b.
[0076] Ведущие стороны ремней 46а, 46b открыты на основной опорной квадратной трубе 42 между верхней рельсовой направляющей 50а и нижней рельсовой направляющей 50b. Обратные стороны ремней 46а, 46b являются внутренними по отношению к основной опорной квадратной трубе 42.
[0077] В результате, кабели 36 для работа 22 уложены в основании 48, проходят через отверстие 58 в держателе 52 и проходят под нижней рельсовой направляющей 50b, а также ремнями 46а, 46b.
Сборка самолета
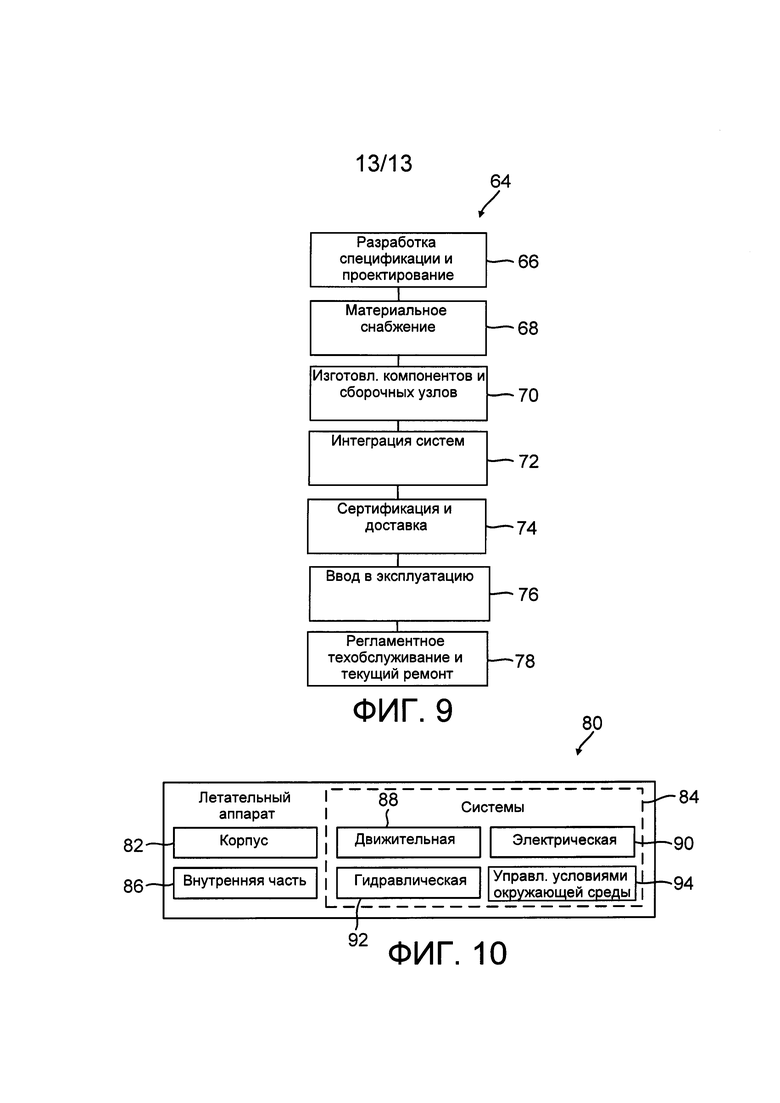
[0078] Раскрытие настоящего изобретения может быть рассмотрено в контексте способа 64 изготовления и технического обслуживания летательного аппарата, включающего этапы 66-78, как показано на ФИГ. 9, и летательного аппарата 80, содержащего компоненты 82-94, как показано на ФИГ. 10.
[0079] Как показано на ФИГ. 9, во время подготовки к изготовлению способ 64 может включать в себя разработку спецификации и проектирование 66 летательного аппарата 80 и материальное снабжение 68. Во время производства имеет место изготовление компонентов и сборочных узлов 70 и интеграция 72 систем летательного аппарата 80. После этого летательный аппарат 80 может пройти через стадию сертификации и доставки 74 для ввода в эксплуатацию 76. При эксплуатации 76 заказчиком летательный аппарат 80 должен проходить запланированные регламентное техобслуживание и текущий ремонт 78 (которые включают в себя модернизацию, перенастройку, переоборудование и так далее). Базовая платформа 18, рабочая платформа 20, роботы 22 и другие элементы, описанные в настоящем документе, могут быть использованы по меньшей мере на этапах 70 и 72 способа 64.
[0080] Каждый из процессов способа 64 может быть выполнен или осуществлен системным интегратором, третьей стороной и/или оператором (например, заказчиком). Для целей настоящего описания системный интегратор может включать в себя, без ограничений, любое количество производителей летательных аппаратов и субподрядчиков по основным системам; третья сторона может включать в себя без ограничения, любое количество продавцов, субподрядчиков и поставщиков; а оператор может представлять собой авиакомпанию, лизинговую компанию, военную организацию, обслуживающую организацию и т.д.
[0081] Как показано на ФИГ. 10, летательный аппарат 80, произведенный с помощью способа 64, может включать в себя корпус 82 с множеством систем 84 и внутренней частью 86. Примеры высокоуровневых систем 84 включают в себя одну или более из следующих систем: движительной системы 88, электрической системы 90, гидравлической системы 92 и системы 94 управления условиями окружающей среды. Может быть включено любое количество других систем. Хотя показан пример для аэрокосмической отрасли, принципы раскрытия настоящего изобретения могут применяться в других отраслях промышленности, таких как автомобильная промышленность.
[0082] Устройство и способы, показанные в настоящем документе, могут быть использованы во время любого одного или более этапов способа 64 изготовления и обслуживания. Например, компоненты или сборочные узлы, относящиеся к этапу 70 изготовления компонентов и сборочных узлов, могут быть изготовлены или произведены аналогично компонентам или сборочным узлам, изготовленным во время эксплуатации 76 летательного аппарата 80. Также один или более вариантов реализации устройства, способа или их комбинации могут быть использованы во время производственных этапов 70 и 72, например, с существенным ускорением сборки или сокращением стоимости летательного аппарата 80. Аналогичным образом, один или более вариантов реализации устройства, способа или их комбинации могут быть использованы во время нахождения летательного аппарата 80 в эксплуатации 76, например и без ограничения, во время запланированного регламентного техобслуживания и текущего ремонта 78.
Настоящее изобретение также изложено в следующих пунктах, которые следует отличать от формулы изобретения.
А1. Устройство для размещения роботов с использованием траверсы, содержащее:
базовую платформу (18);
рабочую платформу (20), размещенную над базовой платформой (18) для поддержки одного или более человек (30);
одного или более роботов (22), поддерживаемых на базовой платформе (18) независимо от рабочей платформы (20); и
по меньшей мере одну траверсу (24), размещенную над базовой платформой (18) и возле рабочей платформы (20), для поддержки и размещения роботов (22) вдоль рабочей платформы (20).
А2. Также предложено устройство по параграфу А1, в котором каждый из роботов (22) расположен на отдельной опорной стойке (26), прикрепленной к траверсе (24).
A3. Также предложено устройство по параграфу А2, в котором отдельная опорная стойка (26) включает в себя основание (48), которое проходит под траверсой (24), для уравновешивания отдельной опорной стойки (26) и расположенного на ней робота (22).
А4. Также предложено устройство по параграфу A3, в котором траверса (24) образована одной или более рельсовыми направляющими (50а, 50b), а отдельная опорная стойка (26) включает в себя держатель (52), крепящий основание (48) к рельсовым направляющим (50а, 50b) для обеспечения перемещения и поддержки отдельной опорной стойки (26) и расположенного на ней робота (22).
А5. Также предложено устройство по параграфу А4, в котором отдельная опорная стойка (26) проходит консольно от рельсовых направляющих (50а, 50b), так что отдельная опорная стойка (26) и расположенный на ней робот (22) поддерживаются с внутренней стороны траверсы (24).
А6. Также предложено устройство по параграфу А4, в котором кабели (36) для роботов (22) поддерживаются основанием (48) отдельной опорной стойки (26) и проложены через отверстие (58) в держателе (52) отдельной опорной стойки (26) к расположенному на ней роботу (22).
А7. Также предложено устройство по параграфу А4, в котором держатель (52) включает в себя один или более несущих блоков (54а, 54b), прикрепленных к концам приводного ремня (46а, 46b), и механизм (56)натяжения ремня, соединяющий несущие блоки (54а, 54b) для обеспечения поддержания необходимого натяжения на приводном ремне (46а, 46b).
А8. Также предложено устройство по параграфу А1, в котором траверса (24) содержит множество приводных ремней (46а, 46b) для независимого размещения множества роботов (22) на траверсе (24) с прохождением к конкретным местоположениям.
А9. Также предложено устройство по параграфу А8, в котором приводные ремни (46а, 46b) размещены вертикально относительно друг друга.
А10. Также предложено устройство по параграфу А8, в котором приводные ремни (46а, 46b) выполнены с возможностью перемещения каждого из роботов (22) в боковом направлении вдоль одной стороны рабочей платформы (20).
A11. Также предложено устройство по параграфу А10, в котором приводные ремни (46а, 46b) выполнены с возможностью перемещения каждого из роботов (22) в боковом направлении вдоль одной стороны рабочей платформы (20), за исключением пространств, занятых другими роботами (22).
А12. Также предложено устройство по параграфу А8, в котором каждый из приводных ремней (46а, 46b) включает в себя двигатель (60а, 60b) и один или более шкивов (62а, 62b), причем двигатель (60а, 60b) размещен на одном конце рабочей платформы (20) возле панели (44) доступа для простого доступа, чтобы произвести техническое обслуживание.
А13. Также предложено устройство по параграфу А1, в котором траверса (24) размещена вдоль края рабочей платформы (20) и по меньшей мере частично под рабочей платформой (20).
А14. Также предложено устройство по параграфу А1, в котором указанная по меньшей мере одна траверса (24) содержит множество траверс (24) на множестве сторон рабочей платформы (20).
А15. Также предложено устройство по параграфу А1, в котором траверса (24) консольно закреплена на одном конце базовой платформы (18), так что оставшаяся часть траверсы (24) размещена над базовой платформой (18).
Согласно еще одному аспекту настоящего изобретения предложен:
В1. Способ размещения роботов с использованием траверсы, включающий: обеспечение базовой платформы (18);
размещение рабочей платформы (20) над базовой платформой (18) для поддержки одного или более человек (30);
поддержку одного или более роботов (22) на базовой платформе (18) независимо от рабочей платформы (20); и
размещение по меньшей мере одной траверсы (24) над базовой платформой (18) и возле рабочей платформы (20) для поддержки и размещения роботов (22) вдоль рабочей платформы (20).
В2. Также предложен способ по параграфу В1, согласно которому каждый из роботов (22) расположен на отдельной опорной стойке (26), прикрепленной к траверсе (24).
В3. Также предложен способ по параграфу В2, согласно которому отдельная опорная стойка (26) включает в себя основание (48), которое проходит под траверсой (24), для уравновешивания отдельной опорной стойки (26) и расположенного на ней робота (22).
В4. Также предложен способ по параграфу В3, согласно которому траверса (24) образована одной или более рельсовыми направляющими (50а, 50b), а отдельная опорная стойка (26) включает в себя держатель (52), крепящий основание (48) к рельсовым направляющим (50а, 50b) для обеспечения перемещения и поддержки отдельной опорной стойки (26) и расположенного на ней робота (22).
В5. Также предложен способ по параграфу В4, согласно которому отдельная опорная стойка (26) проходит консольно от рельсовых направляющих (50а, 50b), так что отдельная опорная стойка (26) и расположенный на ней робот (22) поддерживаются с внутренней стороны траверсы (24).
В6. Также предложен способ по параграфу В4, согласно которому кабели (36) для роботов (22) поддерживаются основанием (48) отдельной опорной стойки (26) и проложены через отверстие (58) в держателе (52) отдельной опорной стойки (26) к расположенному на ней роботу (22).
В7. Также предложен способ по параграфу В4, согласно которому держатель (52) включает в себя один или более несущих блоков (54а, 54b), прикрепленных к концам приводного ремня (46а, 46b), и механизм (56)натяжения ремня, соединяющий несущие блоки (54а, 54b) для обеспечения поддержания необходимого натяжения на приводном ремне (46а, 46b).
В8. Также предложен способ по параграфу В1, также включающий независимое размещение множества роботов (22) на траверсе (24) с прохождением к конкретным местоположениям с использованием множества приводных ремней (46а, 46b).
В9. Также предложен способ по параграфу В8, согласно которому приводные ремни (46а, 46b) размещены вертикально относительно друг друга.
В10. Также предложен способ по параграфу В8, согласно которому приводные ремни (46а, 46b) перемещают каждого из роботов (22) в боковом направлении вдоль одной стороны рабочей платформы (20).
В11. Также предложен способ по параграфу В10, согласно которому приводные ремни (46а, 46b) перемещают каждого из роботов (22) в боковом направлении вдоль одной стороны рабочей платформы (20), за исключением пространств, занятых другими роботами (22).
В12. Также предложен способ по параграфу В8, согласно которому каждый из приводных ремней (46а, 46b) включает в себя двигатель (60а, 60b) и один или более шкивов (62а, 62b), причем двигатель (60а, 60b) размещен на одном конце рабочей платформы (20) возле панели (44) доступа для простого доступа, чтобы произвести техническое обслуживание.
В13. Также предложен способ по параграфу В1, согласно которому траверса (24) размещена вдоль края рабочей платформы (20) и по меньшей мере частично под рабочей платформой (20).
В14. Также предложен способ по параграфу В1, согласно которому указанная по меньшей мере одна траверса (24) содержит множество траверс (24) на множестве сторон рабочей платформы (20).
В15. Также предложен способ по параграфу В1, согласно которому траверса (24) консольно закреплена на одном конце базовой платформы (18), так что оставшаяся часть траверсы (24) размещена над базовой платформой (18).
Согласно еще одному аспекту настоящего изобретения предложен:
С1. Способ сборки фюзеляжа летательного аппарата, включающий:
обеспечение базовой платформы (18) в пределах агрегата (14) фюзеляжа;
размещение рабочей платформы (20) над базовой платформой (18) для поддержки одного или более человек (30) в пределах агрегата (14) фюзеляжа;
поддержку одного или более роботов (22) на базовой платформе (18) в пределах агрегата (14) фюзеляжа независимо от рабочей платформы (20); и
размещение по меньшей мере одной траверсы (24) над базовой платформой (18) и возле рабочей платформы (20) для поддержки и размещения роботов (22) вдоль рабочей платформы (20) в пределах агрегата (14) фюзеляжа.

Изобретение относится к робототехнике, в частности к способу и устройству для размещения роботов с использованием траверсы в производственной ячейке (10) для агрегата (14) фюзеляжа. Устройство содержит базовую платформу (18), выполненную с возможностью поддержки множества роботов (22) независимо от рабочей платформы (20), рабочую платформу (20), размещенную над базовой платформой (18) для поддержки одного или более человек (30), по меньшей мере одну траверсу (24), размещенную над базовой платформой (18) и возле рабочей платформы (20), для поддержки и размещения роботов (22) вдоль рабочей платформы (20). Причем указанная по меньшей мере одна траверса (24) содержит множество траверс (24) на множестве сторон рабочей платформы (20). Изобретение обеспечивает возможность безопасной работы людей внутри агрегата фюзеляжа и изолированную поддержку для двигающихся людей и машин без сообщения этого движения роботам, работающим внутри агрегата фюзеляжа. 2 н. и 14 з.п. ф-лы, 14 ил.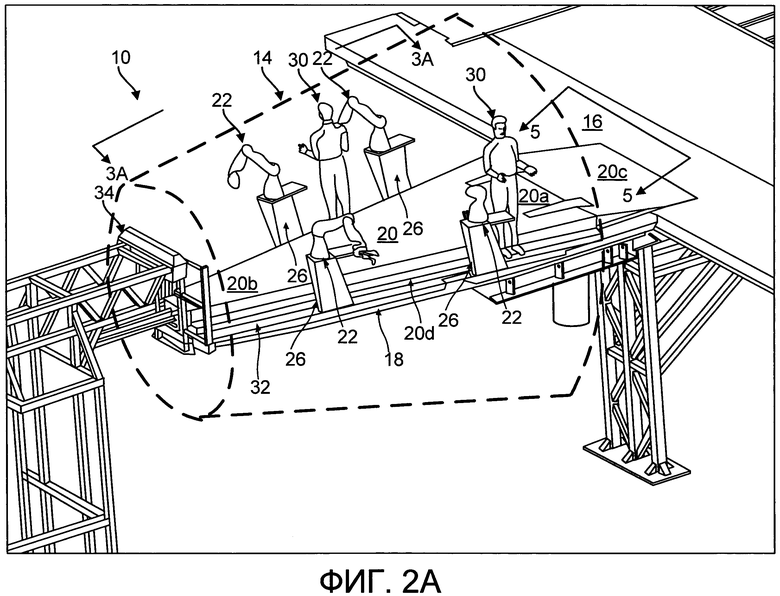
1. Устройство для размещения роботов (22) с использованием траверсы в производственной ячейке (10) для агрегата (14) фюзеляжа, содержащее:
базовую платформу (18);
рабочую платформу (20), размещенную над базовой платформой (18) для поддержки одного или более человек (30);
причём базовая платформа (18) выполнена с возможностью поддержки множества роботов (22) независимо от рабочей платформы (20);
по меньшей мере одну траверсу (24), размещенную над базовой платформой (18) и возле рабочей платформы (20), для поддержки и размещения роботов (22) вдоль рабочей платформы (20);
причем указанная по меньшей мере одна траверса (24) содержит множество траверс (24) на множестве сторон рабочей платформы (20).
2. Устройство по п. 1, в котором каждый из роботов (22) расположен на отдельной опорной стойке (26), прикрепленной к одной из траверс (24).
3. Устройство по п. 2, в котором отдельная опорная стойка (26) включает в себя основание (48), которое проходит под указанной одной траверсой (24), для уравновешивания отдельной опорной стойки (26) и расположенного на ней робота (22).
4. Устройство по п. 2 или 3, в котором указанная одна траверса (24) образована одной или более рельсовыми направляющими (50a,50b), а отдельная опорная стойка (26) включает в себя держатель (52), крепящий основание (48) к рельсовым направляющим (50a,50b) для обеспечения перемещения и поддержки отдельной опорной стойки (26) и расположенного на ней робота (22).
5. Устройство по п. 4, в котором отдельная опорная стойка (26) проходит консольно от рельсовых направляющих (50a,50b), так что отдельная опорная стойка (26) и расположенный на ней робот (22) поддерживаются с внутренней стороны указанной одной траверсы (24).
6. Устройство по п. 4 или 5, в котором каждая траверса (24) содержит множество приводных ремней (46a,46b) для независимого размещения множества роботов (22) на траверсе (24) с прохождением к конкретным местоположениям и в котором держатель (52) включает в себя один или более несущих блоков (54a,54b), прикрепленных к концам приводного ремня (46a,46b), и механизм (56) натяжения ремня, соединяющий несущие блоки (54a,54b) для обеспечения поддержания необходимого натяжения на приводном ремне (46a,46b).
7. Устройство по любому из пп. 1-5, в котором каждая траверса (24) содержит множество приводных ремней (46a,46b) для независимого размещения множества роботов (22) на траверсе (24) с прохождением к конкретным местоположениям.
8. Устройство по п. 6 или 7, в котором приводные ремни (46а, 46b) расположены вертикально относительно друг друга.
9. Устройство по любому из пп. 6-8, в котором приводные ремни (46a,46b) выполнены с возможностью перемещения каждого из роботов (22) в боковом направлении вдоль одной стороны рабочей платформы (20).
10. Устройство по любому из пп. 6-9, в котором каждый из приводных ремней (46a,46b) включает в себя двигатель (60a,60b) и один или более шкивов (62a,62b), причем двигатель (60a,60b) размещен на одном конце рабочей платформы (20) возле панели (44) доступа для простого доступа, чтобы произвести техническое обслуживание.
11. Устройство по любому из пп. 1-10, в котором каждая траверса (24) размещена вдоль края рабочей платформы (20) и по меньшей мере частично под рабочей платформой (20).
12. Устройство по любому из пп. 1-11, в котором каждая траверса (24) консольно закреплена на одном конце базовой платформы (18), так что оставшаяся часть указанной траверсы (24) размещена над базовой платформой (18).
13. Способ размещения роботов (22) с использованием траверсы в производственной ячейке (10) для агрегата (14) фюзеляжа, включающий:
обеспечение базовой платформы (18);
размещение рабочей платформы (20) над базовой платформой (18) для поддержки одного или более человек (30);
поддержку множества роботов (22) на базовой платформе (18) независимо от рабочей платформы (20);
размещение по меньшей мере одной траверсы (24) над базовой платформой (18) и возле рабочей платформы (20) для поддержки и размещения роботов (22) вдоль рабочей платформы (20);
причем указанная по меньшей мере одна траверса (24) содержит множество траверс (24) на множестве сторон рабочей платформы (20).
14. Способ по п. 13, который включает независимое размещение множества роботов (22) на траверсах (24) в определенных местоположениях с использованием множества приводных ремней (46а, 46b).
15. Способ по п. 14, в котором приводные ремни (46а, 46b) расположены вертикально относительно друг друга.
16. Способ по п. 14 или 15, в котором приводные ремни (46a, 46b) выполнены с возможностью перемещения каждого из роботов (22) в боковом направлении вдоль одной стороны рабочей платформы (20).
| DE 202015101427 U1, 28.07.2016 | |||
| US 20150343473 A1, 03.12.2015 | |||
| US 20160011593 A1, 14.01.2016 | |||
| US 6779272 B2, 24.08.2004 | |||
| СПОСОБ СБОРКИ ИЗДЕЛИЯ НА НЕСКОЛЬКИХ РАБОЧИХ ЭТАПАХ, КОМПЛЕКС СБОРОЧНЫХ ПРИСПОСОБЛЕНИЙ И ИСПОЛЬЗУЕМОЕ В НИХ ПЕРЕНОСНОЕ СБОРОЧНОЕ ПРИСПОСОБЛЕНИЕ | 2012 |
|
RU2517920C1 |
| СПОСОБ СБОРКИ ФЮЗЕЛЯЖА САМОЛЕТА | 1997 |
|
RU2121452C1 |

