Изобретение относится к области станкостроения и может быть использовано в рамках реализации Государственной программы модернизации и технологического развития ведущих отраслей народного хозяйства посредством внедрения современного уровня достижений науки и техники в сфере комплексной механической обработки резанием сложнопрофильных изделий в ведущих отраслях техники, определяющих уровень экономического развития государства в целом.
То есть преимущественное направление использования - автоматизированная мехатронная обработка резанием функционального слоя изделий со сложным пространственным профилем как формируемых в этом слое криволинейных поверхностей, так и дискретных структур, при использовании известного из уровня техники модернизированных станочного парка и вспомогательного оборудования (приспособлений).
Из уровня техники известен способ обработки резанием изделия с поверхностью сложного профиля в функциональном слое посредством многофункционального программно-аппаратного агрегата, заключающийся в следующем. Осуществляют главное формообразующее перемещение инструмента относительно поверхности функционального слоя изделия с использованием программно-организованной координатной исполнительной системы перемещения. Для этого используют металлорежущий станок, на станине которого размещают исполнительную систему позиционирования и относительного рабочего перемещения заготовки и инструмента, которую оснащают координатно-организованной системой главного формообразующего перемещения и позиционирования инструмента относительно поверхности функционального слоя изделия. При этом используют исполнительную систему, в которую включают: установленные непосредственно на станине станка основной стол для базирования обрабатываемого изделия, а также средство установки узлов и механизмов исполнительной системы, кинематически организующих рабочие перемещения непосредственно режущего инструмента. В состав этого средства установки узлов и механизмов вводят инструментальную головку с вращающимся по круговой координате «С» шпинделем, которую организуют с возможностью возвратно-поступательного перемещения по координате «Z». Кроме того, комплекс оснащают системой числового программного управления (ЧПУ) упомянутой исполнительной системой, посредством которой (системы ЧПУ) обеспечивают возможность формирования интегрального формообразующего относительного перемещения изделия и инструмента по заданной программе в процессе технологического цикла (патент RU №2356704, В23D 5/02, 2008 г.).
К недостаткам данного известного из уровня техники способа (реализуемого посредством использования вышеописанного программно-аппаратного комплекса) следует отнести ограниченные функциональные возможности и, как следствие, относительно невысокие производительность и класс точности обработки.
В основу заявленного технического решения была положена задача расширения функциональных возможностей заявленного способа (реализуемого посредством использования соответствующего программно-аппаратного комплекса) за счет обеспечения выполнения различных технологических операций (в частности, строгания, фрезерования, сверления, растачивания, токарной обработки), в том числе обработку боковых (прямолинейных и профильных) поверхностей изделия при одном установе обрабатываемой заготовки на базовой поверхности, а также повышения производительности оборудования при повышении класса точности и чистоты обработки поверхности изделия за счет отсутствия необходимости осуществления переустановки заготовки на протяжении полного технологического цикла. То есть весь технологический цикл осуществляется от одной базы, что, кроме всего прочего, упрощает программное обеспечение управляющего процессора системы ЧПУ, так как не требуется дополнительная корректировка программы в зависимости от погрешностей базирования заготовки.
Технический результат заключается в повышении класса точности и чистоты обработки поверхности изделия при повышении производительности технологического оборудования и процесса в целом за счет возможности осуществления полного цикла обработки при однократном базировании заготовки на одной базовой поверхности.
Поставленный технический результат обеспечивается посредством того, что в способе обработки резанием изделия с поверхностью сложного профиля посредством многофункционального программно-аппаратного агрегата, включающем главное формообразующее перемещение инструмента относительно поверхности функционального слоя изделия с использованием программно-организованной координатной исполнительной системы перемещения и позиционирования инструмента относительно поверхности функционального слоя изделия, при этом используют исполнительную систему позиционирования и относительного рабочего перемещения заготовки и инструмента, которая включает: установленные непосредственно на станине станка основной стол для базирования обрабатываемого изделия, а также средство установки узлов и механизмов исполнительной системы, кинематически организующих рабочие перемещения непосредственно режущего инструмента, в состав которых вводят инструментальную головку с вращающимся по круговой координате С шпинделем, которую выполняют с возможностью возвратно-поступательного перемещения по координате Z; агрегат оснащают системой числового программного управления упомянутой исполнительной системой, посредством которой обеспечивают возможность формирования интегрального формообразующего относительного перемещения изделия и инструмента по заданной программе в процессе технологического цикла, согласно изобретению главное формообразующее перемещение инструмента осуществляют последовательным перемещением инструмента вдоль направляющей, которая представляет собой линию, сформированную как огибающая последовательных положений дуг окружностей, имитирующих режущий контур используемой в инструменте круглой режущей пластины с возможностью формирования трехмерной поверхности; инструмент пространственно размещают таким образом, что ось поворота шпинделя инструментальной головки лежит в плоскости передней поверхности режущего инструмента; средство установки узлов и механизмов исполнительной системы конструктивно выполняют в виде траверсы, которую оснащают горизонтальными направляющими, ориентированными вдоль координатной оси X, в окне станины размещают поворотный магазин инструментов с набором инструментальных оправок, который конструктивно организуют с возможностью возвратно-поступательного перемещения вдоль координатной оси «Y»; основной стол исполнительной системы устанавливают с возможностью ограниченного поворота по круговой координате «B» и оснащают поворотным столом, кинематически связанным с основным с возможностью осуществления поворота по круговой координате «A»; кроме того, исполнительную систему дополнительно оснащают: кареткой с горизонтальными направляющими, ориентированными ортогонально направляющим траверсы вдоль координатной оси «Y» и установленной на горизонтальных направляющих траверсы; ползуном, который устанавливают на горизонтальных направляющих каретки и оснащают вертикальными направляющими, ориентированными вдоль координатной оси «Z»; при этом инструментальную головку кинематически связывают с ползуном с возможностью осуществления возвратно-поступательного перемещения по координате «Y» совместно с ползуном и независимого перемещения по координате «Z».
Целесообразно инструментальную головку оснащать жестко связанным с ней разгрузочным устройством, которое конструктивно организуют в виде корпуса с размещенной в его полости на опорах вращения втулкой, кинематически не связанной со шпинделем и выполненной с конической посадочной поверхностью, посредством которой базируют оправку режущего инструмента в виде строгального или токарного резца.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного технического решения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками и связями между ними, идентичными всем существенным признакам заявленного технического решения, а выбранный из перечня выявленных аналогов прототип, как наиболее близкий по совокупности признаков аналог, позволил выявить совокупность существенных (по отношению к усматриваемому заявителем техническому результату) отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное техническое решение соответствует условию патентоспособности «новизна» по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию условия патентоспособности «изобретательский уровень» заявитель провел дополнительный поиск известных технических решений, с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного технического решения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного изобретения преобразований на достижение усматриваемого заявителем технического результата.
В частности, заявленным изобретением не предусматриваются следующие преобразования известного объекта-прототипа:
- дополнение известного объекта каким-либо известным признаком, присоединяемым к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно таких дополнений;
- замена какого-либо признака известного объекта другим известным признаком для достижения технического результата, в отношении которого установлено влияние именно такой замены;
- исключение какого-либо признака известного объекта с одновременным исключением обусловленной наличием этого признака функции и достижением при этом обычного для такого исключения результата;
- увеличение количества однотипных признаков в известном объекте для усиления технического результата, обусловленного наличием в объекте именно таких признаков;
- выполнение известного объекта или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создание объекта, включающего известные признаки, выбор которых и связь между ними осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами признаков этого объекта и связей между ними.
Следовательно, заявленное изобретение соответствует требованию условия патентоспособности «изобретательский уровень» по действующему законодательству.
Изобретение иллюстрируется графическими материалами.
Фиг.1 - общий вид программно-аппаратного агрегата для реализации заявленного способа (вид сбоку в разрезе).
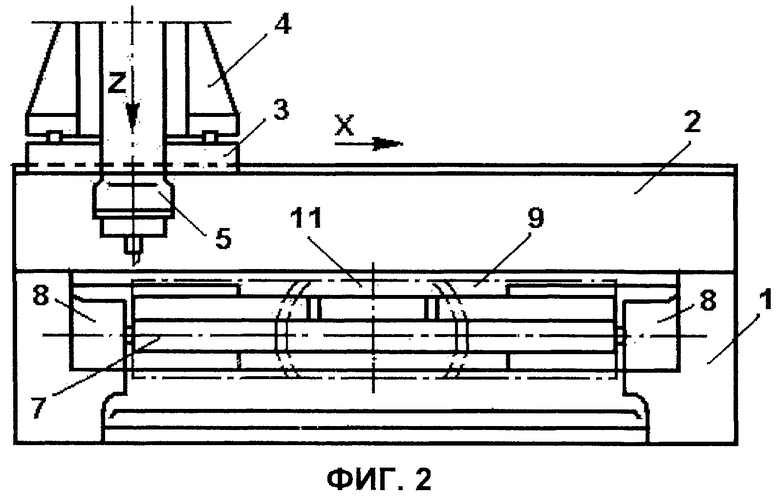
Фиг.2 - общий вид программно-аппаратного агрегата для реализации заявленного способа (вид слева по фиг.1).
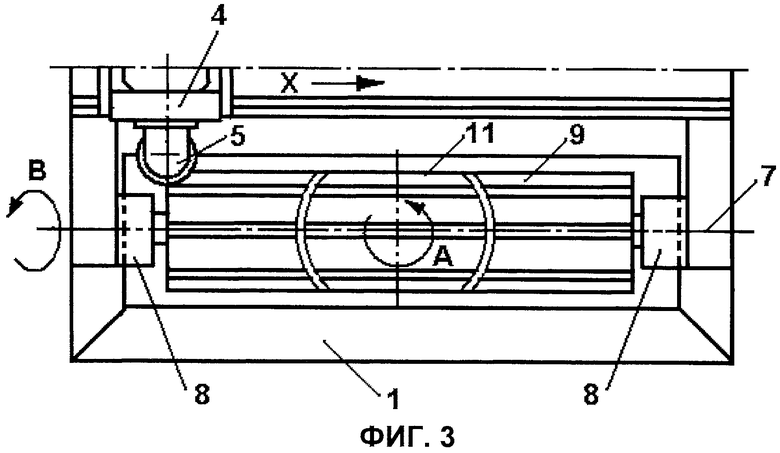
Фиг.3 - общий вид программно-аппаратного агрегата для реализации заявленного способа (вид сверху по фиг.2).
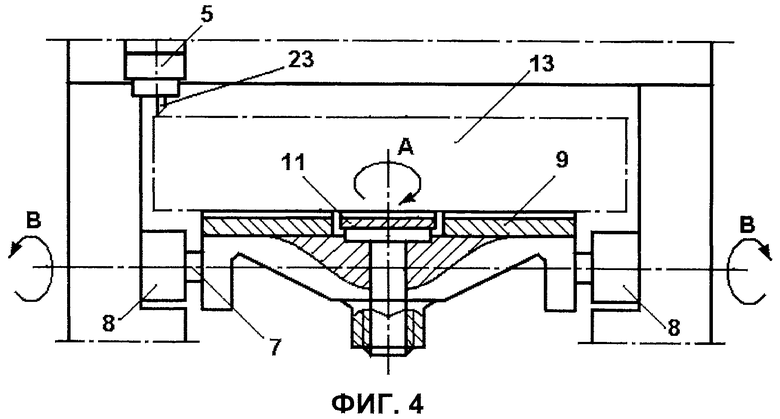
Фиг.4 - фрагмент программно-аппаратного агрегата для реализации заявленного способа по фиг.2 с основным столом в разрезе.
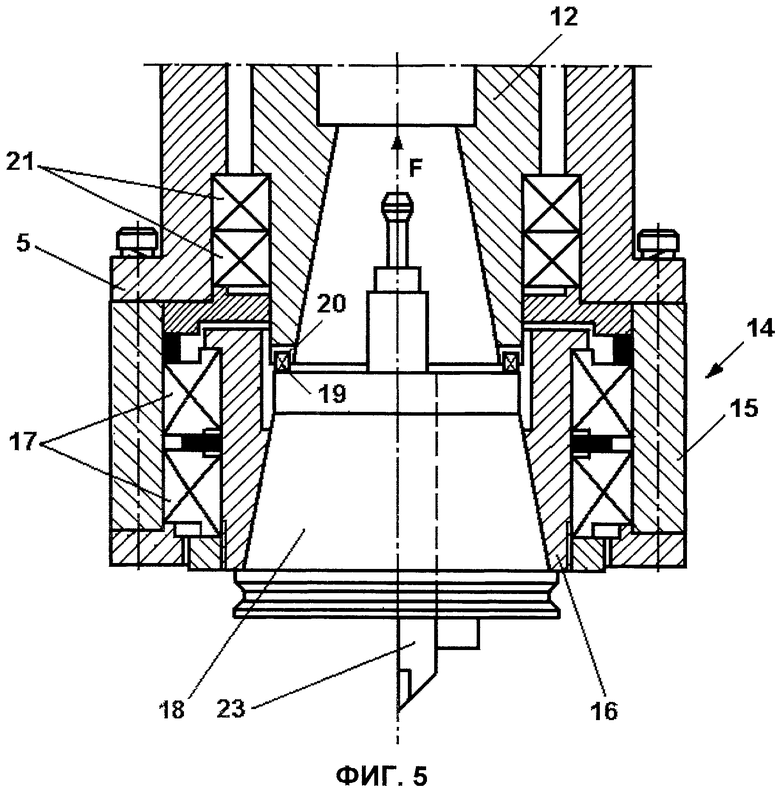
Фиг.5 - общий вид (в разрезе) разгрузочного устройства программно-аппаратного агрегата для реализации заявленного способа с установленной оправкой строгального резца.
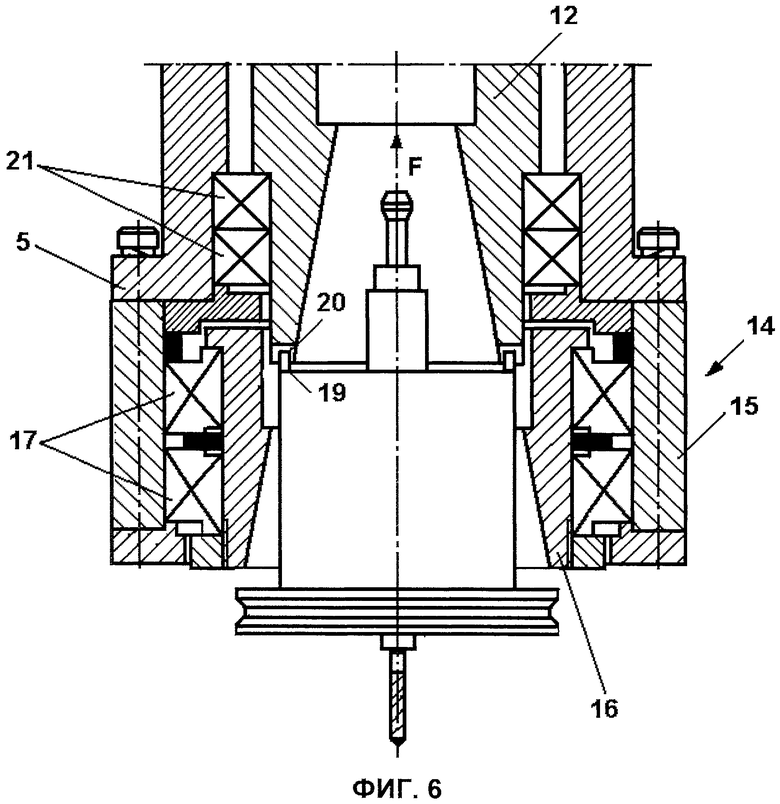
Фиг.6 - общий вид (в разрезе) разгрузочного устройства программно-аппаратного агрегата для реализации заявленного способа с установленной оправкой сверла.
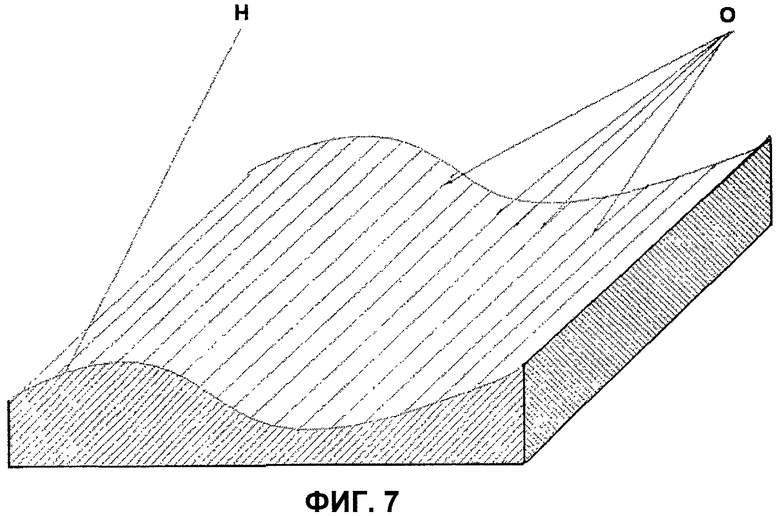
Фиг.7 - фрагмент трехмерной обрабатываемой поверхности с прямолинейной образующей «О» и криволинейной направляющей «Н».
Фиг.8 - фрагмент трехмерной обрабатываемой поверхности с криволинейными и изменяющимися по конфигурации образующей «О» и направляющей «Н».
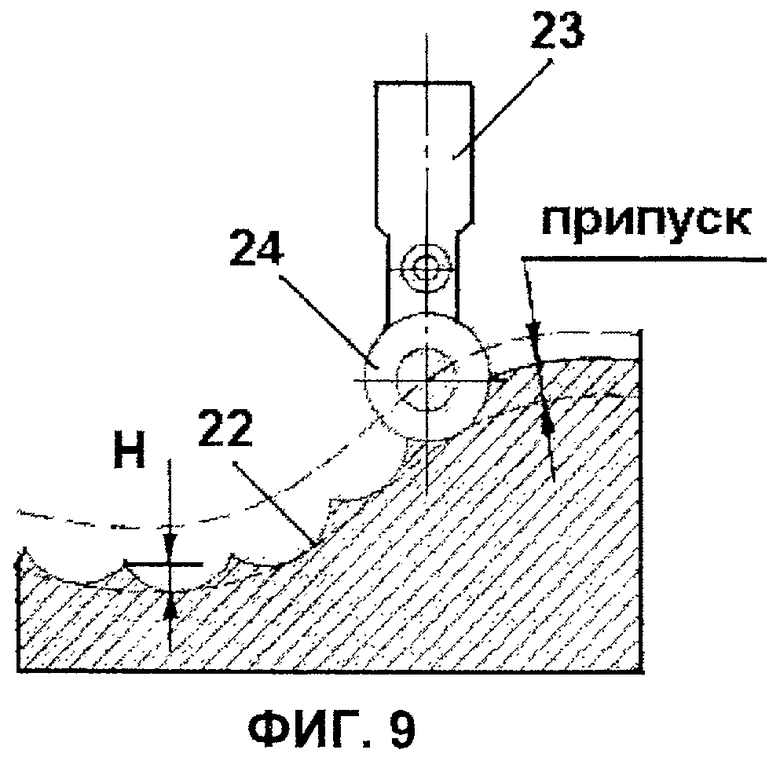
Фиг.9 и Фиг.10 - схема резания криволинейной поверхности строгальным резцом с круглой сменной режущей пластиной.
В графических материалах основные узлы и агрегаты программно-аппаратного комплекса для реализации заявленного комплекса обозначены следующими позициями:
1 - станина;
2 - траверса (неподвижная с горизонтальными направляющими - координатная ось X);
3 - каретка (с горизонтальными направляющими - координатная ось Y);
4 - ползун (установленный на горизонтальных направляющих каретки 3);.
5 - головка (инструментальная шпиндельная);
6 - узел разгрузки (шпинделя 12 инструментальной головки 5);
7 - ось (поворота основного стола 9);
8 - опоры (оси 7 поворота основного стола 9);
9 - стол (основной поворотный);
10 - магазин инструментов (поворотный);
11 - стол (установленный с возможностью поворота по круговой координате по стрелке А относительно основного стола 9 поворотного);
12 - шпиндель (установленный с возможностью поворота по стрелке С в шпиндельной головке 5);
13 - заготовка (обрабатываемая);
14 - устройство (разгрузочное);
15 - корпус (разгрузочного устройства 14);
16 - втулка (с конической установочной поверхностью для базирования оправки 18 строгального резца);
17 - подшипники (установочные для втулки 16);
18 - оправка (резца строгального);
19 - зубцы (поводковые оправки 18);
20 - паз (шпинделя 12);
21 - подшипники (установочные шпинделя 12);
22 - поверхность;
23 - резец;
24 - пластина (режущая сменная).
Заявленный способ реализуется следующим образом.
Осуществляют главное формообразующее перемещение инструмента (например, резца 23) относительно поверхности функционального слоя изделия с использованием программно-организованной координатной исполнительной системы перемещения. Главное формообразующее перемещение инструмента осуществляют последовательным перемещением инструмента вдоль направляющей «Н», которая представляет собой линию, сформированную как огибающая последовательных положений дуг окружностей, имитирующих режущий контур используемой в инструменте круглой режущей пластины 24 с возможностью формирования трехмерной поверхности с прямолинейной образующей «О» и криволинейной направляющей «Н» или с криволинейными и изменяющимися по конфигурации образующей «О» и направляющей «Н».
Инструмент пространственно размещают таким образом, что ось поворота шпинделя 12 инструментальной головки 5 лежит в плоскости передней поверхности режущего инструмента.
Многофункциональный программно-аппаратный агрегат для обработки резанием изделия с поверхностью сложного профиля в функциональном слое в рамках заявленного способа включает следующие системы, узлы и агрегаты. Непосредственно металлорежущий станок, на станине 1 которого размещают исполнительную систему позиционирования и относительного рабочего перемещения заготовки 13 и инструмента. Исполнительную систему оснащают координатно организованной системой главного формообразующего перемещения и позиционирования инструмента относительно поверхности функционального слоя изделия. Исполнительная система металлорежущего станка включает: установленные непосредственно на станине 1 станка основной стол 9 для базирования обрабатываемого изделия (заготовки 13), а также средство установки узлов и механизмов исполнительной системы, кинематически организующих рабочие перемещения непосредственно режущего инструмента. В состав указанных узлов и механизмов входит инструментальная головка 5 с вращающимся по круговой координате «С» шпинделем 12, которая организована с возможностью возвратно-поступательного перемещения по координате «Z». Кроме того, комплекс включает систему числового программного управления (ЧПУ, в графических материалах условно не показана) упомянутой исполнительной системой, посредством которой (системы ЧПУ) обеспечивают возможность формирования интегрального формообразующего относительного перемещения изделия (заготовки 13) и инструмента по заданной программе в процессе технологического цикла.
Отличительными особенностями агрегата для реализации заявленного способа является следующее.
Упомянутое средство установки узлов и механизмов исполнительной системы конструктивно организуют в виде жестко установленной на станине 1 траверсы 2, которую оснащают горизонтальными направляющими, ориентированными вдоль координатной оси «X». В окне станины 1 размещают поворотный магазин 10 инструментов с набором инструментальных оправок, который конструктивно организуют с возможностью возвратно-поступательного перемещения вдоль координатной оси «Y». Основной стол исполнительной системы устанавливают с возможностью ограниченного поворота по круговой координате «В» и оснащают поворотным столом, кинематически связанным с основным с возможностью осуществления поворота по круговой координате «А». Кроме того, исполнительную систему дополнительно оснащают: кареткой 3 с горизонтальными направляющими, которые ориентируют ортогонально направляющим траверсы 2 вдоль координатной оси «Y» (каретка 3 установлена на горизонтальных направляющих траверсы 2); ползуном 4, который устанавливают на горизонтальных направляющих каретки 3 и оснащают вертикальными направляющими, ориентированными вдоль координатной оси «Z». При этом инструментальную головку 5 кинематически связывают с ползуном 4 с возможностью осуществления возвратно-поступательного перемещения по координате «Y» совместно с ползуном 4 и независимого перемещения по координате «Z». Кроме того, целесообразно оснащать инструментальную головку 5 жестко связанным с ней разгрузочным устройством 14, которое конструктивно организуют в виде корпуса 15 с размещенной в его полости на опорах вращения (подшипниках 17) втулкой 16, которую кинематически не связывают со шпинделем 12 и выполняют с конической посадочной поверхностью для базирования оправки 18 режущего инструмента в виде строгального резца.
Обрабатываемая заготовка 13 базируется на поворотном столе 9.
Совершенно очевидно, что вышеописанные системы, узлы и агрегаты программно-аппаратного агрегата в совокупности формируют исполнительную систему позиционирования и относительного рабочего перемещения заготовки и инструмента, оснащенную координатно организованной системой главного формообразующего перемещения и позиционирования инструмента относительно поверхности функционального слоя изделия, которая функционирует на базе системы числового программного управления (ЧПУ) упомянутой исполнительной системой, обеспечивающей (относится к системе ЧПУ) возможность формирования интегрального формообразующего относительного перемещения изделия и инструмента по заданной программе в процессе технологического цикла.
Программно-аппаратный агрегат (в технологическом цикле реализации заявленного способа) работает следующим образом.
В исходном положении инструментальная шпиндельная головка 5 находится в крайнем правом положении, магазин 10 инструментов входит в рабочую зону таким образом, что ось загружаемого инструмента совмещается с осью шпинделя 12. При подходе шпиндельной головки по оси «Z» к инструменту, находящемуся в соответствующем гнезде магазина 10, срабатывает фиксирующее зажимное устройство в направлении стрелки F. Таким образом, инструмент, например оправка 18 со строгальным резцом (фиг.5), базируется в конусе втулки 16 и по ее торцу, а зубцы 19 входят в паз шпинделя 12, магазин 10 возвращается в исходное положение, оставляя инструмент в шпинделе станка. Благодаря наличию у шпинделя 12 возможности поворота по круговой координате «С» и поводковым зубцам 19, входящим в паз шпинделя 12, по соответствующей программе резцом, зафиксированным в определенном угловом положении, осуществляется токарная или строгальная обработка заготовки 13. Причем строгальная обработка может осуществляться не только по прямым траекториям, но и по криволинейным, в том числе трехмерным. Это обеспечивается благодаря возможности управлять по заданной программе поворотом резца таким образом, чтобы его режущая кромка всегда была ориентирована перпендикулярно касательной к траектории движения в каждой точке этой траектории.
Следует отметить, что в процессе строгания обеспечивается возможность осуществления технологического цикла без холостого хода режущего инструмента, за счет обеспечения возможности поворота передней поверхности резца на угол 180° в конце каждого прохода, что повышает производительность процесса и упрощает технологический цикл процесса строгания вследствие отсутствия необходимости подъема резца при обратном ходе.
Фрезерно-расточные операции осуществляются инструментами в оправке, показанной на фиг.6.
Вся последовательность перемещений по соответствующим координатам как рабочих органов, несущих режущий инструмент, так и столов 9 и 11 с обрабатываемой заготовкой 13 (устанавливаемой с возможностью поворота по круговым координатам А и В) программно организована и функционирует посредством системы числового программного управления, связанной посредством пульта управления с процессором управляющего компьютера (в графических материалах условно не показаны).
При этом в технологической последовательности выполняются необходимые операции, например строгание удлиненных узких поверхностей, доработка некоторых участков обработанной поверхности фрезерованием и обсверловка.
При смене операций заменяется и инструмент: отработавший инструмент возвращается в магазин 10 инструментов, а необходимый для следующей операции - посредством вращения магазина 10 помещается в позицию смены, где осуществляется его фиксация в гнезде шпинделя 12 вышеописанным способом.
Таким образом, обеспечивается многофункциональность технологического процесса обработки изделий резанием с использованием программно-аппаратного агрегата и повышается производительность процесса при повышении точности и качества обрабатываемых профильных поверхностей изделия.
На фиг, 7 представлен фрагмент трехмерной обрабатываемой поверхности с прямолинейной образующей и криволинейной направляющей. Сложная поверхность, сформированная последовательным положением прямолинейных образующих, представляет собой отрезки траекторий прямолинейных движений резца 23 относительно заготовки. Криволинейная направляющая является линией, сформированной как огибающая последовательных положений дуг окружностей, имитирующих режущий контур круглой режущей пластины 24. Кривая сформирована в соответствии со значениями координат точек, заданных на чертеже изделия. Контур направляющей остается неизменным по конфигурации вдоль образующих.
На Фиг.8 представлен фрагмент трехмерной обрабатываемой поверхности с криволинейными и изменяющимися по конфигурации образующей и направляющей. Контур направляющей также представляет собой огибающую последовательных положений контура режущей пластины, однако конфигурация этого контура изменяется вдоль образующей, которая, в отличие от поверхности по фиг.5, является криволинейной.
На фиг.9 и фиг.10 показана схема обработки криволинейной поверхности 22 детали с помощью резца 23, оснащенного круглой пластиной 24. Контур сечения поверхности 22 представляет собой линию, огибающую следы от дуг окружностей, оставленные режущим контуром пластины 24. Расстояние S между осями соседних окружностей (между смежными проходами) определяет высоту микронеровностей и назначается в зависимости от требований к шероховатости обрабатываемой поверхности. Это расстояние S вычисляется по формуле:
 , где:
, где:
Н - допустимая высота микронеровностей обработанной поверхности, заданная на чертеже детали;
D - диаметр режущей твердосплавной пластины.
На фиг.5 видно, что вершина резца должна располагаться на оси вращения (поворота) шпинделя. Такое расположение резца является обязательным для осуществления силового строгания. Любое смещение вершины резца с оси поворота шпинделя приводит к возникновению крутящего момента на шпинделе и требует введения коррекции в программу управляющего компьютера при работе с поворотом резца для формирования точно расположенных криволинейных поверхностей.
Таким образом, обеспечивается многофункциональность программно-аппаратного агрегата и повышается производительность при повышении точности и качества обрабатываемых профильных поверхностей изделия.
Следовательно, заявленный способ обработки резанием с использованием вышеописанного программно-аппаратного агрегата может быть использован для автоматизированной мехатронной обработки резанием функционального слоя изделий со сложным пространственным профилем как формируемых в этом слое протяженных криволинейных поверхностей, так и дискретных структур, при использовании известного из уровня техники модернизированных станочного парка и вспомогательного оборудования (приспособлений), что подтверждает соответствие заявленного технического решения условию патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМООБРАЗОВАНИЯ ПОСРЕДСТВОМ ОБРАБОТКИ РЕЗАНИЕМ ИЗДЕЛИЯ С ПОВЕРХНОСТЬЮ СЛОЖНОГО ПРОФИЛЯ С ИСПОЛЬЗОВАНИЕМ МНОГОФУНКЦИОНАЛЬНОГО ПРОГРАММНО-АППАРАТНОГО ЦЕНТРА | 2010 |
|
RU2446916C1 |
| СПОСОБ ОБРАБОТКИ РЕЗАНИЕМ ИЗДЕЛИЯ С ПОВЕРХНОСТЬЮ СЛОЖНОГО ПРОФИЛЯ И ФУНКЦИОНАЛЬНЫМ СЛОЕМ ПОНИЖЕННОЙ ЖЕСТКОСТИ ПОСРЕДСТВОМ МНОГОФУНКЦИОНАЛЬНОГО ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА | 2010 |
|
RU2446033C1 |
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА ДЛЯ ФОРМИРОВАНИЯ РЕЗАНИЕМ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ | 2007 |
|
RU2360771C2 |
| СПОСОБ ФОРМИРОВАНИЯ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 2007 |
|
RU2356704C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ИНСТРУМЕНТА В КООРДИНАТНОЙ СИСТЕМЕ ОТСЧЕТА СТАНКА АВТОМАТИЗИРОВАННОГО ГРАВИРОВАЛЬНОГО КОМПЛЕКСА | 2005 |
|
RU2279964C1 |
| СПОСОБ ОБРАБОТКИ ИЗДЕЛИЙ СТРОГАНИЕМ | 2004 |
|
RU2282524C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ФАСОННОГО РЕЗЦА | 2012 |
|
RU2491156C1 |
| СПОСОБ ОБРАБОТКИ ЗУБЬЕВ КОНИЧЕСКИХ КОЛЕС НА СТАНКЕ ДЛЯ ОБРАБОТКИ ЦИЛИНДРИЧЕСКИХ КОЛЕС МЕТОДОМ ОБКАТКИ | 1993 |
|
RU2088386C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПОЛУТОНОВОГО ИЗОБРАЖЕНИЯ В ФУНКЦИОНАЛЬНОМ СЛОЕ ИЗДЕЛИЯ | 2007 |
|
RU2355586C1 |
| Способ строгания нелинейных поверхностей тонкостенных деталей лопаточных машин и инструмент для его реализации | 2023 |
|
RU2818545C1 |


Изобретение относится к области станкостроения. Способ обработки изделия резанием включает главное формообразующее перемещение (ГФП) инструмента относительно поверхности изделия с использованием программно-организованной координатной исполнительной системы (ИС) перемещения. ГФП инструмента осуществляют последовательным перемещением инструмента вдоль направляющей, представляющей собой линию, сформированную как огибающая последовательных положений дуг окружностей, имитирующих режущий контур используемой в инструменте круглой режущей пластины с возможностью формирования трехмерной поверхности. Инструмент размещают так, что ось поворота шпинделя 12 инструментальной головки (ИГ) 5 лежит в плоскости передней поверхности режущего инструмента. Средство установки узлов и механизмов ИС выполняют в виде жестко установленной на станине 1 траверсы 2 с горизонтальными направляющими. В станине 1 размещают поворотный магазин 10 инструментов. Основной стол ИС устанавливают с возможностью ограниченного поворота по круговой координате В и оснащают поворотным столом, кинематически связанным с основным с возможностью поворота. ИС также оснащают кареткой 3 и ползуном 4, при этом ИГ 5 кинематически связывают с ползуном 4. Обеспечивается повышение класса точности и чистоты обработки поверхности изделия и повышение производительности процесса. 1 з.п. ф-лы, 10 ил.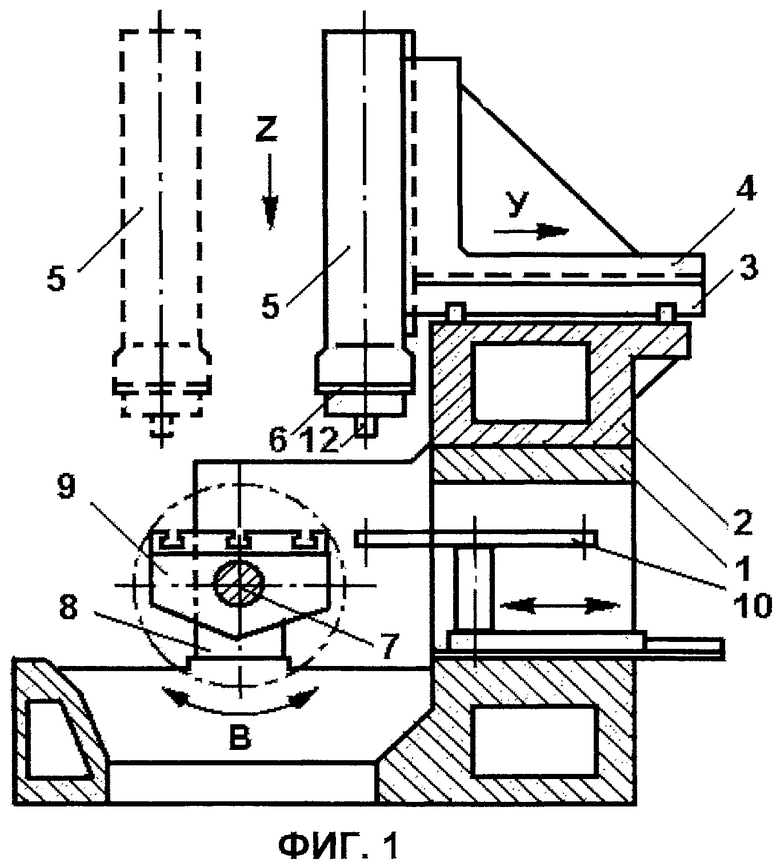
1. Способ обработки изделия с поверхностью сложного профиля резанием посредством многофункционального программно-аппаратного агрегата (МПАА), включающий главное формообразующее перемещение режущего инструмента относительно поверхности функционального слоя изделия с использованием программно-организованной координатной исполнительной системы перемещения, которую оснащают координатно-организованной системой главного формообразующего перемещения и позиционирования режущего инструмента относительно поверхности функционального слоя изделия, при этом используют исполнительную систему позиционирования и относительного рабочего перемещения заготовки и режущего инструмента, которая включает установленные непосредственно на станине станка МПАА основной стол для базирования обрабатываемого изделия, а также средство установки узлов и механизмов исполнительной системы, кинематически организующих непосредственно рабочие перемещения режущего инструмента, в состав которых вводят инструментальную головку с вращающимся по круговой координате «C» шпинделем, которую выполняют с возможностью возвратно-поступательного перемещения по координате «Z», при этом МПАА оснащают системой числового программного управления упомянутой исполнительной системы, посредством которой обеспечивают возможность формирования интегрального формообразующего относительного перемещения изделия и режущего инструмента по заданной программе в процессе технологического цикла, отличающийся тем, что главное формообразующее перемещение режущего инструмента осуществляют последовательным перемещением инструмента вдоль направляющей, которая представляет собой линию, сформированную как огибающая последовательных положений дуг окружностей, имитирующих режущий контур используемой в инструменте круглой режущей пластины с возможностью формирования трехмерной поверхности, а режущий инструмент пространственно размещают таким образом, что ось поворота шпинделя инструментальной головки лежит в плоскости передней поверхности режущего инструмента, при этом упомянутое средство установки узлов и механизмов исполнительной системы конструктивно выполняют в виде траверсы, которую оснащают горизонтальными направляющими, ориентированными вдоль координатной оси «X», а в окне станины устанавливают поворотный магазин инструментов с набором инструментальных оправок, который конструктивно выполняют с возможностью возвратно-поступательного перемещения вдоль координатной оси «Y», при этом основной стол исполнительной системы устанавливают с возможностью ограниченного поворота по круговой координате «B» и оснащают поворотным столом, кинематически связанным с основным с возможностью осуществления поворота по круговой координате «A», а исполнительную систему дополнительно оснащают кареткой с горизонтальными направляющими, ориентированными ортогонально направляющим траверсы вдоль координатной оси «Y», и установленной на горизонтальных направляющих траверсы, ползуном, который устанавливают на горизонтальных направляющих каретки и оснащают вертикальными направляющими, ориентированными вдоль координатной оси «Z», при этом инструментальную головку кинематически связывают с ползуном с возможностью осуществления возвратно-поступательного перемещения по координате «Y» совместно с ползуном и независимого перемещения по координате «Z».
2. Способ по п.1, отличающийся тем, что инструментальную головку оснащают жестко связанным с ней разгрузочным устройством, которое конструктивно выполняют в виде корпуса с размещенной в его полости на опорах вращения втулкой, кинематически не связанной со шпинделем и выполненной с конической посадочной поверхностью, посредством которой базируют оправку режущего инструмента в виде строгального или токарного резца.
| СПОСОБ ФОРМИРОВАНИЯ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 2007 |
|
RU2356704C2 |
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА ДЛЯ ФОРМИРОВАНИЯ РЕЗАНИЕМ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ | 2007 |
|
RU2360771C2 |
| МЕТАЛЛОРЕЖУЩИЙ СТАНОК И СПОСОБ ОБРАБОТКИ ДЕТАЛЕЙ С ПОМОЩЬЮ ЭТОГО СТАНКА | 1994 |
|
RU2139170C1 |
| WO 9748555 A1, 24.12.1997. | |||

