Изобретение относится к области станкостроения и может быть использовано в рамках реализации Государственной программы модернизации и технологического развития ведущих отраслей народного хозяйства посредством внедрения современного уровня достижений науки и техники в сфере комплексной механической обработки резанием сложнопрофильных изделий пониженной жесткости в ведущих отраслях промышленности, определяющих уровень экономического развития государства в целом.
То есть преимущественное направление использования - технологически-конструктивная организация автоматизированной мехатронной обработки резанием функционального слоя изделий пониженной жесткости со сложным пространственным профилем как формируемых в этом слое криволинейных поверхностей, так и дискретных структур, при использовании известного из уровня техники модернизированных станочного парка и вспомогательного оборудования (приспособлений).
Более конкретно - предложенное техническое решение относится к технологии обработки деталей пониженной жесткости типа;
пера лопаток турбин, лонжеронов, нервюр летательных аппаратов, иных кромок аэродинамического профиля и прочих протяженных сложнопрофильных изделий пониженной жесткости.
Из уровня техники известен способ обработки резанием изделия пониженной жесткости с поверхностью сложного профиля в функциональном слое посредством многофункционального программно-аппаратного агрегата, заключающийся в следующем. Осуществляют главное формообразующее перемещение инструмента относительно поверхности функционального слоя изделия с использованием программно-организованной координатной исполнительной системы перемещения. Для этого используют металлорежущий станок, на станине которого размещают исполнительную систему позиционирования и относительного рабочего перемещения заготовки и инструмента, которую оснащают координатно организованной в ортогональной системе координат «XYZ» структурой главного формообразующего перемещения и позиционирования инструмента относительно поверхности функционального слоя изделия. Кроме того, используют исполнительную систему, которую оснащают средствами: обеспечения заданной жесткости обрабатываемого изделия, которое конструктивно организуют с возможностью выполнения им функции промежуточной опоры для обрабатываемого изделия в процессе технологического цикла; базирования и фиксации изделия в заданном положении, конструктивно организованными в виде двух оппозитно расположенных опор, снабженных механизмом поворота изделия относительно продольной оси механизма поворота по круговой координате «A»; а также установки узлов и механизмов упомянутой структуры главного формообразующего перемещения и позиционирования инструмента, кинематически организующих рабочие перемещения непосредственно режущего инструмента, в состав которых, т.е. упомянутых узлов и механизмов, вводят инструментальный узел, установленный с возможностью возвратно-поступательного перемещения. Помимо вышеописанного, комплекс оснащают системой числового программного управления - ЧПУ упомянутой исполнительной системой, посредством которой, то есть системы ЧПУ, обеспечивают возможность формирования интегрального формообразующего относительного перемещения изделия и инструмента по заданной программе в процессе технологического цикла (US, №6106204, 2000 г.).
Недостатками данного известного из уровня техники технического решения являются: ограниченные функционально-технологические возможности, т.к. согласно известной технологии, обрабатываться могут только кромки изделия и не могут обрабатываться другие (лицевые) поверхности, например, аэродинамического профиля, поскольку доступ инструмента к ним ограничен средствами, обеспечивающими отсутствие деформации при резании; низкая производительность оборудования и технологического процесса в целом, т.к. отдельные участки функциональной поверхности могут обрабатываться только последовательно; относительно невысокое качество (по точности обработки и шероховатости поверхности), вследствие необходимости после обработки осуществлять еще ручную пригонку обработанных поверхностей; отсутствие возможности использования стандартных режущих пластин.
В основу заявленного технического решения была положена задача расширения функциональных возможностей заявленного способа обработки резанием посредством многофункционального программно-аппаратного комплекса, за счет выполнения различных технологических операций (в частности, строгания, фрезерования, сверления, растачивания, токарной обработки) при одном установе (позиционировании и фиксации) обрабатываемой заготовки на базовых элементах, а также повышения производительности оборудования и технологического процесса в целом, за счет обеспечения возможности обработки одновременно двух участков двух противоположных поверхностей функционального слоя изделия при повышении класса точности и чистоты обработки готовой поверхности изделия.
Технический результат заключается в повышении класса точности и чистоты обработки готовой поверхности изделия при повышении производительности технологического процесса и оборудования, а также в обеспечении конструктивно - технологической возможности использования в инструментальных оправках для реализации заявленного технологического процесса (способа) стандартных (унифицированных) режущих пластин.
Поставленный технический результат обеспечивается посредством того, что в способе обработки резанием изделия пониженной жесткости с поверхностью сложного профиля в функциональном слое посредством многофункционального программно-аппаратного комплекса (агрегата), включающем главное формообразующее перемещение инструмента относительно поверхности функционального слоя изделия с использованием программно-организованной координатной исполнительной системы перемещения, которую оснащают координатно организованной в ортогональной системе координат «XYZ» структурой главного формообразующего перемещения и позиционирования инструмента относительно поверхности функционального слоя изделия; при этом используют исполнительную систему позиционирования и относительного рабочего перемещения заготовки и инструмента, которую оснащают средствами обеспечения заданной жесткости обрабатываемого изделия, конструктивно изготовленного с возможностью выполнения им функции промежуточной опоры для обрабатываемого изделия в процессе технологического цикла; системой базирования и фиксации изделия в заданном положении, изготовленной в виде двух оппозитно расположенных опор, снабженных механизмом поворота изделия относительно продольной оси механизма поворота по круговой координате «А»; и средство установки узлов и механизмов упомянутой структуры главного формообразующего перемещения и позиционирования инструмента, кинематически организующих рабочие перемещения непосредственно режущего инструмента, причем в состав упомянутых узлов и механизмов вводят инструментальный узел, установленный с возможностью возвратно-поступательного перемещения; а агрегат оснащают системой числового программного управления (ЧПУ) упомянутой исполнительной системой, а посредством системы ЧПУ обеспечивают возможность формирования интегрального формообразующего относительного перемещения изделия и инструмента по заданной программе в процессе технологического цикла, согласно изобретению упомянутое средство установки узлов и механизмов упомянутой структуры главного формообразующего перемещения и позиционирования инструмента конструктивно выполняют в виде портала, установленного на направляющих станины с возможностью возвратно-поступательного перемещения в горизонтальной плоскости по координате «Y»; траверсу портала выполняют с горизонтальными направляющими, которые пространственно располагают в плоскости ортогональной координате «Y» и конструктивно организуют с возможностью синхронного возвратно-поступательного перемещения вдоль координаты «Y» совместно с порталом; структуру главного формообразующего перемещения и позиционирования инструмента дополнительно оснащают двумя идентичными каретками с вертикальными направляющими, которые устанавливают на горизонтальных направляющих траверсы с возможностью возвратно-поступательного перемещения по координате «X»; инструментальный узел конструктивно организуют в виде двух идентичных шпиндельных головок с вращающимися относительно своих осей по координате «C» шпинделями, при этом шпиндельные головки устанавливают на вертикальных направляющих кареток с возможностью: независимого возвратно поступательного перемещения по координате «Z»; совместно с каретками - по координате «X»; а также ограниченного поворота по круговым координатам «B» в вертикальной плоскости; при этом упомянутые опоры средств базирования изделия устанавливают на станине независимо от портала, причем таким образом, что продольные оси механизмов поворота изделия пространственно ориентированы ортогонально плоскости расположения продольных осей траверсы и стоек портала, т.е. вдоль координатной оси «Y»; на стойках портала размещают поворотные магазины инструментов с инструментальными оправками; средство обеспечения заданной жесткости обрабатываемого изделия оснащают инструментальной оправкой с опорным элементом и в процессе технологического цикла размещают непосредственно в инструментальном гнезде шпинделя одной из шпиндельных головок исполнительной системы металлорежущего станка многофункционального программно-аппаратного комплекса; а в процессе осуществления технологического цикла обработки изделия опорный элемент упомянутого средства обеспечения заданной жесткости, функционально являющийся промежуточной опорой, позиционируют оппозитно режущему инструменту; при этом в процессе обработки изделия спозиционированные вышеописанным образом режущий инструмент и упомянутый опорный элемент средства обеспечения заданной жесткости синхронно перемещают в направлении резания вдоль технологически заданного контура обрабатываемой поверхности изделия по реализуемой системой числового программного управления программе.
При обработке лицевых поверхностей изделия допустимо в качестве опорного элемента средства обеспечения заданной жесткости обрабатываемого изделия использовать непосредственно второй режущий инструмент или опорный ролик, а в процессе осуществления технологического цикла осуществлять их позиционирование с противоположной стороны поверхности изделия, обрабатываемой в данный момент первым режущим инструментом.
При обработке кромок изделия в качестве опорного элемента средства обеспечения заданной жесткости обрабатываемого изделия используют пару оппозитно расположенных опорных роликов, которые в процессе технологического цикла позиционируют по обе стороны поверхности изделия, обрабатываемой в данный момент режущим инструментом, с возможностью охвата этой поверхности.
В процессе осуществления, например, силового строгания или токарной обработки, по меньшей мере, одну шпиндельную головку оснащают разгрузочным устройством, которое конструктивно организуют в виде корпуса с размещенной в его полости на опорах вращения втулкой, кинематически не связанной со шпинделем, которую оснащают конической посадочной поверхностью для базирования инструментальной оправки режущего инструмента в виде строгального или токарного резца, или средства обеспечения заданной жесткости обрабатываемого изделия, посредством которой, т.е. конической поверхности, функционально формируют инструментальное гнездо.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного технического решения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками и связями между ними, идентичными всем существенным признакам заявленного технического решения, а выбранный из перечня выявленных аналогов прототип, как наиболее близкий по совокупности признаков аналог, позволил выявить совокупность существенных (по отношению к усматриваемому заявителем техническому результату) отличительных признаков в заявленном объекте, изложенных в формуле изобретения.
Следовательно, заявленное техническое решение соответствует условию патентоспособности «новизна» по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию условия патентоспособности «изобретательский уровень» заявитель провел дополнительный поиск известных технических решений, с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного технического решения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного изобретения преобразований на достижение усматриваемого заявителем технического результата.
В частности, заявленным изобретением не предусматриваются следующие преобразования известного объекта-прототипа:
- дополнение известного объекта каким-либо известным признаком, присоединяемым к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно таких дополнений;
- замена какого-либо признака известного объекта другим известным признаком для достижения технического результата, в отношении которого установлено влияние именно такой замены;
- исключение какого-либо признака известного объекта с одновременным исключением обусловленной наличием этого признака функции и достижением при этом обычного для такого исключения результата;
- увеличение количества однотипных признаков в известном объекте для усиления технического результата, обусловленного наличием в объекте именно таких признаков;
- выполнение известного объекта или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создание объекта, включающего известные признаки, выбор которых и связь между ними осуществлены на основании известных правил и достигаемый, при этом технический результат обусловлен только известными свойствами признаков этого объекта и связей между ними.
Следовательно, заявленное изобретение соответствуют требованию условия патентоспособности «изобретательский уровень» по действующему законодательству.
Изобретение иллюстрируется графическими материалами.
Фиг.1 - общий вид программно-аппаратного агрегата для реализации заявленного способа (вид спереди).
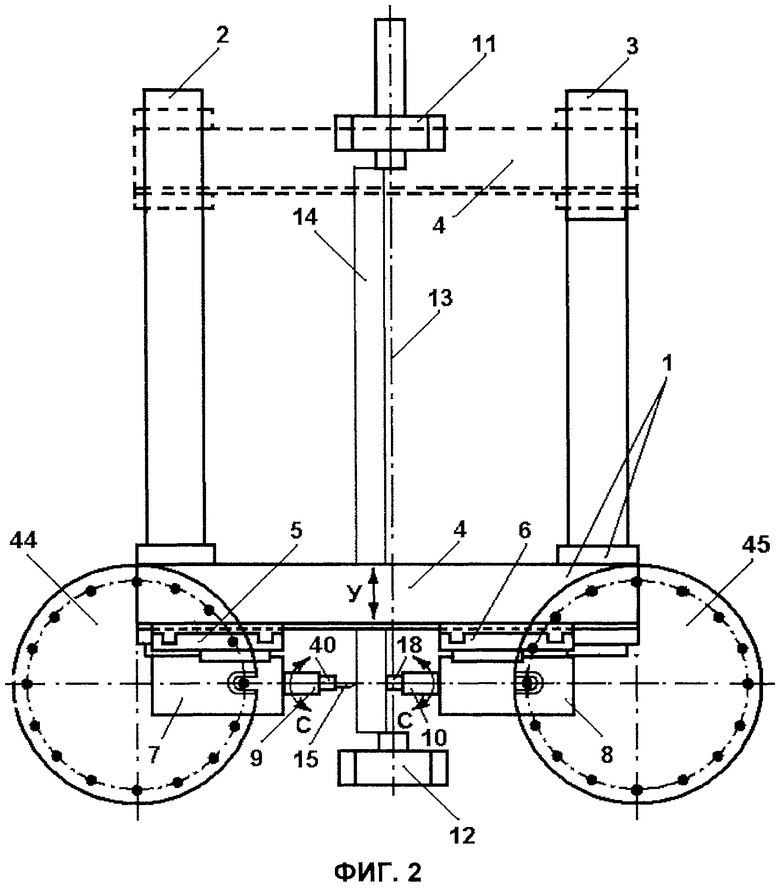
Фиг.2 - общий вид программно-аппаратного агрегата для реализации заявленного способа (вид сверу по фиг.1).
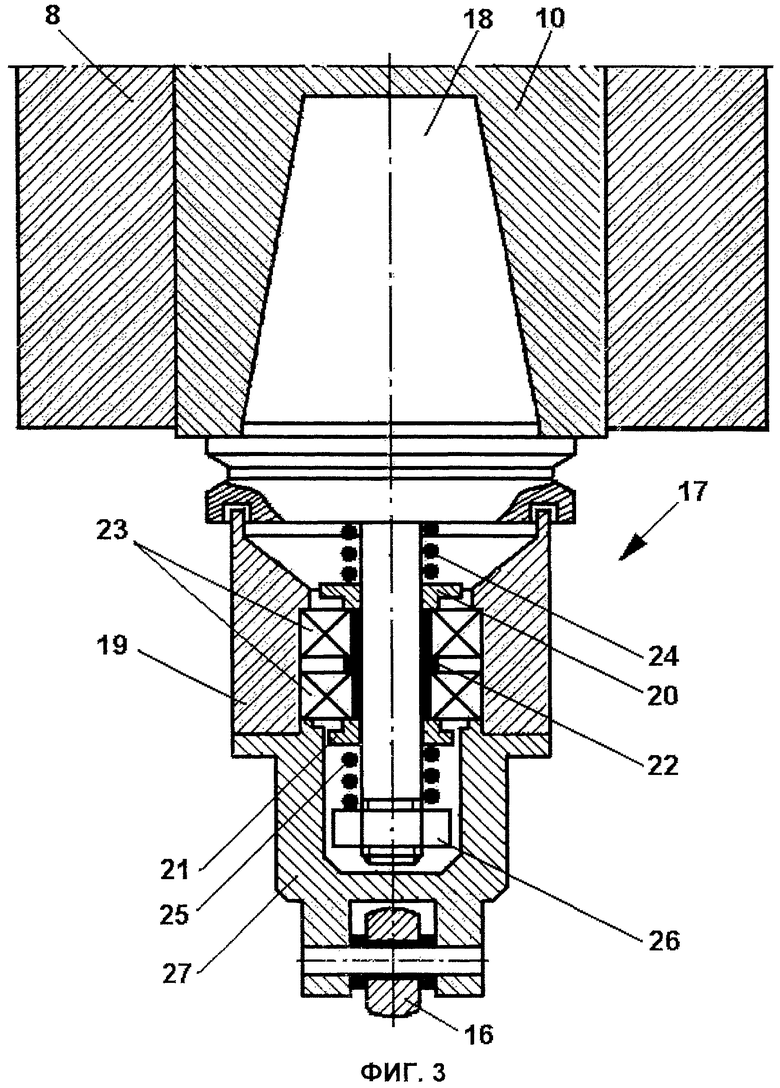
Фиг.3 - средство обеспечения заданной жесткости заготовки (с одним опорным роликом) используемое при обработке ее лицевых поверхностей по схеме, представленной на фиг.1 для реализации заявленного способа (частичный разрез).
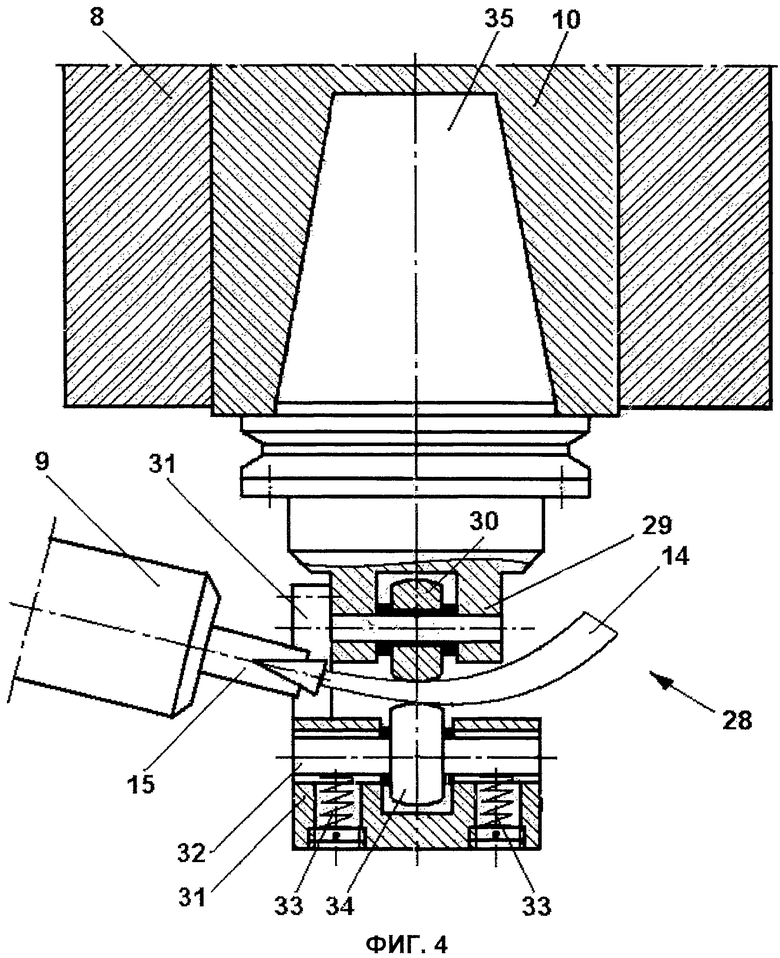
Фиг.4 - средство (с двумя роликами) обеспечения заданной жесткости заготовки при обработке ее кромки по схеме, представленной на данной фигуре, в рамках реализации заявленного способа (частичный разрез).
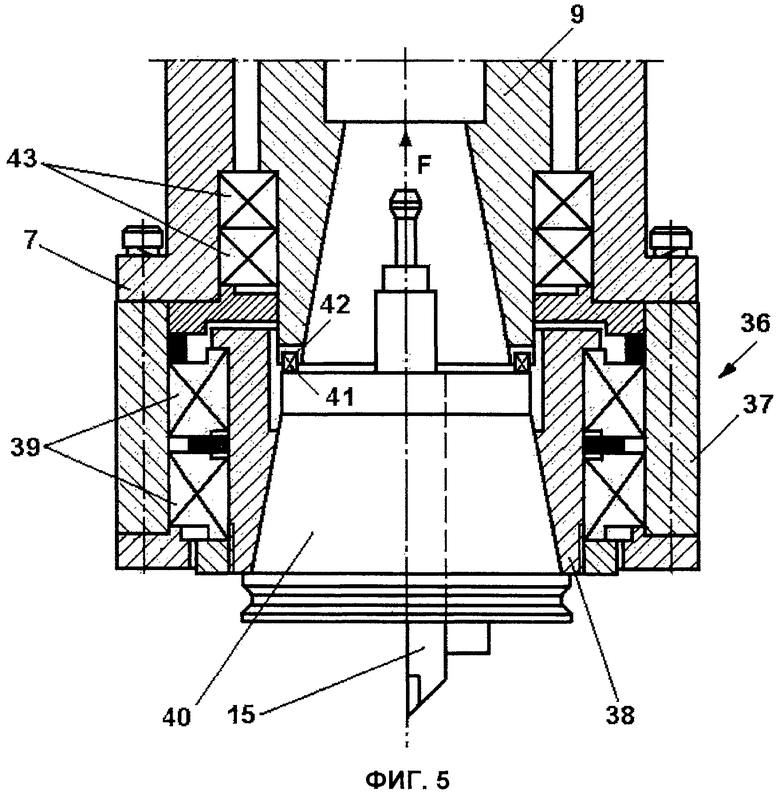
Фиг.5 - общий вид (в разрезе) разгрузочного устройства программно-аппаратного агрегата для реализации заявленного способа с установленной оправкой строгального резца.
Фиг.6 - общий вид (в разрезе) разгрузочного устройства программно-аппаратного агрегата для реализации заявленного способа с установленной оправкой для сверла или фрезы.
В графических материалах основные системы, узлы и механизмы программно-аппаратного агрегата для осуществления заявленного способа обработки резанием изделия пониженной жесткости с поверхностью сложного профиля в функциональном слое обозначены следующими позициями:
1 - портал (металлорежущего станка многофункционального агрегата для реализации способа, установленный на направляющих станины с возможностью возвратно-поступательного перемещения по координате «Y»);
2 и 3 - стойки (портала 1);
4 - траверса (портала 1 с горизонтальными направляющими /координата «X»/ пространственно расположенными в плоскости ортогональной координате «Y» и установленная с возможностью возвратно-поступательного перемещения вдоль координаты «Y» совместно с порталом 1);
5 и 6 - каретки (структуры главного формообразующего перемещения и позиционирования инструмента, с вертикальными направляющими /координата «Z»/, установленные на горизонтальных направляющих траверсы 4 с возможностью возвратно-поступательного перемещения по координате «X)»;
7 и 8 - головки (шпиндельные инструментального узла, установленные на вертикальных направляющих кареток 5 и 6 соответственно, с возможностью независимого возвратно поступательного перемещения по координате «Z» и, совместно с каретками 5 и 6 - по координате «X», а также ограниченного поворота по круговым координатам «B» в вертикальной плоскости);
9 и 10 - шпиндели (шпиндельных головок 7 и 8 соответственно, установленные с возможностью вращения относительно своих продольных осей по координате «C»);
11 и 12 - опоры (для установки и закрепления заготовки 14 с возможностью ее поворота по координате «A» вокруг оси 13, опора 11 - подвижная по координате «Y»);
13 - ось (поворота заготовки 14);
14 - заготовка;
15 - инструмент;
16 - ролик (опорный средства 17 /фиг.3/ обеспечения заданной жесткости заготовки 14);
17 - средство (обеспечения заданной жесткости заготовки 14 при обработке лицевых поверхностей заготовки 14 по схеме, представленной на фиг.1);
18 - оправка (средства 17);
19 - корпус (средства 17);
20 и 21 шайбы (нажимные средства 17);
22 - втулка (посадочная средства 17);
23 - подшипники (втулки 22 средства 17);
24 и 25 - пружины (регулируемые средства 17);
26 - гайка (регулировочная пружин 24 и 25);
27 - головка (сменная средства 17);
28 - средство (обеспечения заданной жесткости заготовки 14 при обработке кромки заготовки 14 по схеме, представленной на фиг.4);
29 - вилка (средства 28 для жесткой установки ролика 30);
30 - ролик (средства 28 жестко установленный в вилке 29);
31 - корпус;
32 - ось (подвижная подпружиненная);
33 - пружины;
34 - ролик (подпружиненный посредством оси 32);
35 - оправка (средства 28);
36 - устройство (разгрузочное);
37 - корпус (разгрузочного устройства 36);
38 - втулка (с конической установочной поверхностью для базирования оправки 40 строгального резца);
39 - подшипники (установочные для втулки 38);
40 - оправка (резца строгального);
41 - зубцы (поводковые оправки 40);
42 - паз (шпинделя 9);
43 - подшипники (установочные шпинделя 9);
44 и 45 - магазины (инструментов с инструментальными оправками);
46 и 47 - направляющие (станины металлорежущего станка).
Способ обработки резанием изделия пониженной жесткости с поверхностью сложного профиля в функциональном слое посредством многофункционального программно-аппаратного агрегата заключается в следующем.
Осуществляют главное формообразующее перемещение инструмента 15 относительно поверхности функционального слоя изделия с использованием программно-организованной координатной исполнительной системы перемещения. Для этого используют металлорежущий станок, на станине которого размещают исполнительную систему позиционирования и относительного рабочего перемещения заготовки 14 и инструмента 15, которую оснащают координатно организованной в ортогональной системе координат «XYZ» структурой главного формообразующего перемещения и позиционирования инструмента 15 относительно поверхности функционального слоя изделия. Кроме того, используют исполнительную систему, которую оснащают:
- средством 17 или 28 обеспечения заданной жесткости обрабатываемого изделия, которое конструктивно организуют с возможностью выполнения им функции промежуточной опоры для обрабатываемого изделия в процессе технологического цикла;
- средствами базирования и фиксации изделия в заданном положении, конструктивно организованными в виде двух оппозитно расположенных опор 11 и 12, снабженных механизмом поворота изделия относительно продольной оси 13 механизма поворота по круговой координате «A»;
- а также средство установки узлов и механизмов упомянутой структуры главного формообразующего перемещения и позиционирования инструмента, кинематически организующих рабочие перемещения непосредственно режущего инструмента (в том числе, и средств 17 и 28 обеспечения заданной жесткости заготовки 14).
В состав упомянутых узлов и механизмов структуры главного формообразующего перемещения и позиционирования инструмента вводят инструментальный узел, установленный с возможностью возвратно-поступательного перемещения. Кроме того, агрегат оснащают системой числового программного управления - ЧПУ упомянутой исполнительной системой, посредством которой, то есть системы ЧПУ, обеспечивают возможность формирования интегрального формообразующего относительного перемещения изделия и инструмента 15 по заданной программе в процессе технологического цикла.
Отличительными особенностями заявленного способа является следующее.
Упомянутое средство установки узлов и механизмов структуры главного формообразующего перемещения и позиционирования инструмента 15 конструктивно организуют в виде портала 1, который устанавливают на направляющих 46 и 47 станины с возможностью возвратно-поступательного перемещения в горизонтальной плоскости по координате «Y». Траверсу 4 портала 1 выполняют с горизонтальными направляющими, которые пространственно располагают в плоскости ортогональной координате «Y» и конструктивно организуют с возможностью синхронного возвратно-поступательного перемещения вдоль координаты «Y» совместно с порталом 1. Структуру главного формообразующего перемещения и позиционирования инструмента 15 дополнительно оснащают двумя идентичными каретками 5 и 6 с вертикальными направляющими, которые (т.е. каретки 5 и 6) устанавливают на горизонтальных направляющих траверсы 4 с возможностью возвратно-поступательного перемещения по координате «X». Инструментальный узел конструктивно организуют в виде двух идентичных шпиндельных головок 7 и 8 с вращающимися относительно своих осей по координате «C» шпинделями 9 и 10 соответственно. При этом шпиндельные головки 7 и 8 устанавливают на вертикальных направляющих кареток 5 и 6 соответственно, с возможностью:
- независимого возвратно поступательного перемещения по координате «Z»;
- совместного с каретками возвратно-поступательного перемещения по координате «X»;
- а также ограниченного поворота по круговым координатам «В» в вертикальной плоскости.
При этом упомянутые опоры 11 и 12 средств базирования изделия устанавливают на станине независимо от портала 1, причем таким образом, что продольные оси 13 механизмов поворота изделия пространственно ориентированы ортогонально плоскости расположения продольных осей траверсы 4 и стоек 2 и 3 портала 1, т.е. вдоль координатной оси «Y». На стойках 2 и 3 портала размещают поворотные магазины 44 и 45 инструментов с инструментальными оправками 18, 35, 40. Средство 17 или 28 обеспечения заданной жесткости обрабатываемого изделия оснащают инструментальной оправкой 18 или 35, или 40 с опорным элементом и, в процессе технологического цикла, размещают непосредственно в инструментальном гнезде шпинделя 9 или 10 одной из шпиндельных головок 7 или 8 соответственно, исполнительной системы металлорежущего станка многофункционального программно-аппаратного комплекса. В процессе осуществления технологического цикла обработки изделия опорный элемент упомянутого средства 17 или 28 обеспечения заданной жесткости, функционально являющийся промежуточной опорой, позиционируют оппозитно режущему инструменту 15 (см. фиг.1 и фиг.4). При этом в процессе обработки изделия спозиционированные вышеописанным образом режущий инструмент 15 и упомянутый опорный элемент средства 17 или 28 обеспечения заданной жесткости синхронно перемещают в направлении резания вдоль технологически заданного контура обрабатываемой поверхности изделия по реализуемой системой числового программного управления программе.
При обработке лицевых поверхностей изделия допустимо в качестве опорного элемента средства 17 обеспечения заданной жесткости обрабатываемого изделия использовать непосредственно второй режущий инструмент 15 или опорный ролик 16 (см. фиг.1), а в процессе осуществления технологического цикла осуществлять их позиционирование с противоположной стороны поверхности изделия, обрабатываемой в данный момент первым режущим инструментом 15.
При обработке кромок изделия в качестве опорного элемента средства 28 обеспечения заданной жесткости обрабатываемого изделия используют пару оппозитно расположенных опорных роликов 30 и 34, которые в процессе технологического цикла позиционируют по обе стороны поверхности изделия, обрабатываемой в данный момент режущим инструментом, с возможностью охвата этой поверхности.
В процессе осуществления, например, силового строгания или токарной обработки, по меньшей мере, одну шпиндельную головку 7 или 8 оснащают разгрузочным устройством 36. Данное устройство 36 конструктивно организуют в виде корпуса 37 с размещенной в его полости на опорах вращения (подшипниках 39) втулкой 38, кинематически не связанной со шпинделем 9 или 10. Втулку 38 оснащают конической посадочной поверхностью для базирования инструментальной оправки 40 или 18 режущего инструмента 15 в виде строгального или токарного резца, или средства обеспечения заданной жесткости обрабатываемого изделия (в виде режущего инструмента 15), посредством которой, т.е. конической поверхности, функционально формируют инструментальное гнездо.
Совершенно очевидно, что вышеописанные системы, узлы и механизмы программно-аппаратного агрегата в совокупности формируют исполнительную систему позиционирования и относительного рабочего перемещения заготовки и инструмента, оснащенную координатно организованной структурой главного формообразующего перемещения и позиционирования инструмента относительно поверхности функционального слоя изделия. Данная структура главного формообразующего перемещения и позиционирования инструмента функционирует на базе системы числового программного управления (ЧПУ) упомянутой исполнительной системой, обеспечивающей (относится к системе ЧПУ) возможность формирования интегрального формообразующего относительного перемещения изделия и инструмента 15 по заданной программе в процессе технологического цикла.
Более подробно заявленный способ раскрыт на примере работы программно-аппаратного агрегата для реализации заявленного способа обработки.
Программно-аппаратный агрегат, реализующий многофункциональный технологический цикл обработки заготовок 14 пониженной жесткости, работает следующим образом.
Шпиндельная головка 7 (см. фиг.1) еще не содержащая, например инструмента 15 в виде строгального резца, разворачивается по круговой координате «B» таким образом, что ее ось совпадает с соответствующей ячейкой магазина 44 инструментов 15, в которой помещен необходимый инструмент 15. Посредством перемещения головки 7 по координате «Z» до соответствующей ячейки магазина 44 инструмент 15 помещается в шпинделе 9 головки 7 и там автоматически закрепляется. Посредством перемещения каретки 5 вправо инструмент 15 удаляется из магазина 44. Головка 7 с инструментом 15 по заданной программе в процессе интегрально-организованного перемещения по соответствующим координатам («Y», «B», «X» и «Z») подходит к обрабатываемой заготовке 14 и дополнительным перемещением портала 1 по координате «Y» производит обработку, например силовое строгание. Если обрабатываемая заготовка 14 имеет достаточную жесткость реализуемой высоконагруженной обработки, то головка 8, также снабженная режущим инструментом 15, может обрабатывать заготовку 14 одновременно с головкой 7 с противоположной стороны заготовки 14. Здесь следует отметить, что, поскольку оба используемых инструмента пространственно расположены строго оппозитно друг другу по разные стороны обрабатываемой заготовки 14 (при обработке противоположных лицевых поверхностей), то каждый инструмент 15 функционально выполняет дополнительную функцию жесткой опоры для обрабатываемого в данный момент участка поверхности заготовки 14 в отношении исключения прогиба обрабатываемой поверхности на данном участке под действием усилия со стороны противолежащего инструмента 15.
То есть при данной схеме обработки каждый инструмент функционально является средством (аналогичным средству 17) обеспечения заданной жесткости заготовки 14.
В случае, если обрабатываемая заготовка недостаточно жесткая, то используется подпор обрабатываемой поверхности роликом 16 (в средстве 17, см. фиг.1) или двумя роликами 30 и 34 (в средстве 28, см. фиг.4), в зависимости от того, какая поверхность заготовки 14 в данный момент обрабатывается. Например, ролик 16 (см. фиг.1), который, перемещаясь синхронно с инструментом 15 головки 7 (см. фиг.1), все время находится напротив режущего инструмента 15 по другую сторону заготовки 14, тем самым полностью исключает ее деформацию. При этом могут быть использованы повышенные (высоконагруженные) режимы обработки, что в значительной степени повышает производительность технологического процесса реализуемого рассматриваемым программно-аппаратным комплексом. Средство 17 обеспечения заданной жесткости заготовки, представленное на фиг.3, в зависимости от профиля поверхности заготовки 14 (по которой должен перемещаться ролик 16), может сменяться на средство 17 с другим роликом 16, наиболее соответствующим профилю обрабатываемой в данный момент поверхности заготовки 14. Смена этих средств (как средства 17, так и средства 28) происходит из магазина 46 и/или 47 аналогично вышеописанному процессу смены режущего инструмента 15 из магазина 44. Во время поджима ролик 16 (средства 17, см. фиг.3), благодаря возможному повороту корпуса 19 вокруг своей оси, самоустанавливается в нужном положении.
Таким образом, согласно заявленному техническому решению во время силовой обработки поверхностей заготовки 14, например, строгальным резцом, имеется возможность поджима роликом 16 (или противоположно расположенным вторым режущим инструментом) заготовки 14 в зоне нахождения резца и перемещаемым по заданной программе синхронно с резцом. Шпиндели 9 и 10 головок 7 и 8 могут (кроме свободного вращения по координатам «C» для фрезерно-расточных работ) разворачиваться в управляемом следящем режиме по круговым координатам «C» и фиксироваться в необходимом угловом положении при строгальных работах. Головки 7 и 8 могут разворачиваться по круговым координатам «B», за счет чего также может осуществляться корректировка пространственного положения режущего инструмента 15 (а соответственно, и опорных элементов средств 17 и 28) относительно обрабатываемой поверхности в процессе ее формообразования, что повышает точность обработки.
В случаях, когда жесткость заготовки 14 позволяет вместо опорных роликов 16, 30, 34 использовать режущий инструмент 15, то обработка может осуществляться одновременно двумя, оппозитно расположенными инструментами 15 с обеих сторон заготовки 14.
На фиг.3 представлено средство 17, выполненное в виде встроенного в оправку 18 подпружиненного ролика 16, содержащее, кроме перечисленного, корпус 19, встроенные в корпус 19 подшипники 23, втулку 22, нажимные шайбы 20 и 21, пружины 24 и 25, сменная головка 27 со смонтированным в ней роликом 16.
На фиг.4 представлено средство 28, выполненное в виде: встроенных в оправку 35 вилки 29 с роликом 30; закрепленного на вилке 29 корпуса 31, в котором на подвижной подпружиненной оси 32 смонтирован ролик 34. Ось 32 под воздействием пружин 33 прижимает ролик 34 через тело обрабатываемой заготовки 14 к ролику 30. Режущий инструмент 15 (например, строгальный резец), перемещаясь вдоль кромки заготовки 14 в направлении координаты «Y» синхронно вместе с роликами 30 и 34, может вести интенсивную силовую обработку кромки заготовки 14, например, кромки пера лопатки колеса турбины.
При использовании разгрузочного устройства 36 инструмент 15, например, строгальный резец, установленный в инструментальной оправке 40 (см. фиг.5), базируется в конусе втулки 38 и по ее торцу разгрузочного устройства 36, а поводковые зубцы 41 входят в паз шпинделя 9 и/или 10. Благодаря наличию у шпинделя 9 и/или 10 возможности поворота по круговой координате «C» и поводковым зубцам 41, входящим в паз шпинделя 9 и/или 10, по заданной программе строгальным резцом, зафиксированным в определенном угловом положении, осуществляется строгальная обработка заготовки 14. Таким образом, наиболее слабое в данной кинематической цепи звено - шпиндель 9 и/или 10 разгружается от касательных составляющих, возникающих на инструменте 15 в процессе силового строгания, поскольку данные составляющие воспринимаются непосредственно соответствующими базовыми элементами шпиндельных головок 7 и/или 8, к которым жестко крепится разгрузочное устройство 36.
Необходимо отметить, что наличие рассматриваемого разгрузочного устройства 36 не препятствует осуществлению на данном многофункциональном комплексе (без съема этого устройства 36) операций фрезерования, сверления и других, требующих высокооборотного вращения шпинделя 9 и/или 10 (см. конструкцию инструментальной оправки сверла или фрезы по фиг.6).
Необходимо также отметить, что строгальная обработка может осуществляться не только по прямым траекториям, но и по криволинейным, в том числе трехмерным. Это обеспечивается благодаря возможности управлять по заданной программе поворотом резца таким образом, чтобы его режущая кромка всегда была ориентирована перпендикулярно касательной к траектории движения в каждой точке этой траектории.
Важно отметить (с точки зрения решения задачи повышения производительности заявленного технического решения (т.е. многофункционального комплекса и комплексного технологического процесса в целом), что при строгании обеспечивается возможность осуществления технологического цикла без холостого хода режущего инструмента, за счет обеспечения возможности поворота передней поверхности резца на угол 180° в конце каждого прохода, что повышает производительность процесса и упрощает технологический цикл процесса строгания (в том числе, и в плане программного обеспечения системы ЧПУ комплекса) вследствие отсутствия необходимости подъема резца при обратном ходе.
Строгальные операции осуществляются строгальным резцом (инструментом 15) установленным в оправке 40, показанной на фиг.5.
Фрезерно-расточные операции осуществляются инструментами в оправке показанной на фиг.6.
Вся последовательность перемещений по соответствующим координатам как рабочих органов, несущих режущий инструмент 15, так и средств базирования и фиксации в заданном положении обрабатываемой заготовки 14 (устанавливаемой с возможностью поворота по круговой координате «A») программно организована и функционирует посредством системы числового программного управления (ЧПУ), связанной посредством пульта управления с процессором управляющего компьютера (в графических материалах условно не показаны).
При этом в технологической последовательности выполняются необходимые операции, например, строгание удлиненных узких поверхностей, доработка некоторых участков обработанной поверхности фрезерованием и обсверловка.
При смене операций заменяется и инструмент 15: отработавший инструмент 15 возвращается в магазин 44 и/или 45 инструментов 15, а необходимый для следующей операции - посредством вращения магазина 44 и/или 45 помещается в позицию смены, где осуществляется его фиксация в гнезде шпинделя 9 и/или 10 вышеописанным способом.
Таким образом, обеспечивается многофункциональность программно-аппаратного агрегата и повышается производительность при повышении точности и качества обрабатываемых профильных поверхностей изделия пониженной жесткости.
Следовательно, заявленный способ обработки резанием изделия пониженной жесткости с поверхностью сложного профиля в функциональном слое посредством многофункционального программно-аппаратного агрегата может быть использован для автоматизированной мехатронной обработки резанием функционального слоя изделий пониженной жесткости со сложным пространственным профилем как формируемых в этом слое протяженных криволинейных поверхностей, так и дискретных структур, при использовании известного из уровня техники модернизированных станочного парка и вспомогательного оборудования (приспособлений), что подтверждает соответствие заявленного технического решения условию патентоспособности «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМООБРАЗОВАНИЯ ПОСРЕДСТВОМ ОБРАБОТКИ РЕЗАНИЕМ ИЗДЕЛИЯ С ПОВЕРХНОСТЬЮ СЛОЖНОГО ПРОФИЛЯ С ИСПОЛЬЗОВАНИЕМ МНОГОФУНКЦИОНАЛЬНОГО ПРОГРАММНО-АППАРАТНОГО ЦЕНТРА | 2010 |
|
RU2446916C1 |
| СПОСОБ ОБРАБОТКИ ИЗДЕЛИЯ С ПОВЕРХНОСТЬЮ СЛОЖНОГО ПРОФИЛЯ РЕЗАНИЕМ ПОСРЕДСТВОМ МНОГОФУНКЦИОНАЛЬНОГО ПРОГРАММНО-АППАРАТНОГО АГРЕГАТА | 2010 |
|
RU2446034C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 2007 |
|
RU2356704C2 |
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА ДЛЯ ФОРМИРОВАНИЯ РЕЗАНИЕМ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ | 2007 |
|
RU2360771C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ИНСТРУМЕНТА В КООРДИНАТНОЙ СИСТЕМЕ ОТСЧЕТА СТАНКА АВТОМАТИЗИРОВАННОГО ГРАВИРОВАЛЬНОГО КОМПЛЕКСА | 2005 |
|
RU2279964C1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1349969A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ СЛОЖНЫХ ПОВЕРХНОСТЕЙ ВЫСОКОСКОРОСТНЫМ ФРЕЗЕРОВАНИЕМ | 2012 |
|
RU2544710C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПЕЧАТНЫХ ФОРМ ДЛЯ МЕТАЛЛОГРАФСКОЙ ПЕЧАТИ И ИЗГОТОВЛЕННАЯ ЭТИМ СПОСОБОМ ПЕЧАТНАЯ ФОРМА | 2003 |
|
RU2348533C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРЯМОУГОЛЬНЫХ ОТВЕРСТИЙ, ОПРАВКА РЕЗЦОВАЯ, РЕЗЕЦ | 2001 |
|
RU2212985C2 |
Изобретение относится в области станкостроения. Способ обработки изделия резанием включает главное формообразующее перемещение (ГФП) инструмента относительно поверхности изделия с использованием программно-организованной координатной исполнительной системы (ИС) перемещения. Средство установки узлов и механизмов структуры главного формообразующего перемещения (ГФП) и позиционирования инструмента выполняют в виде портала. Траверсу портала выполняют с горизонтальными направляющими. Структуру ГФП и позиционирования инструмента дополнительно оснащают каретками с вертикальными направляющими. Инструментальный узел выполняют в виде шпиндельных головок с вращающимися шпинделями. Шпиндельные головки устанавливают на вертикальных направляющих кареток. Опоры средств базирования изделия устанавливают на станине независимо от портала. На стойках портала размещают магазины инструментов. Средства обеспечения заданной жесткости обрабатываемого изделия оснащают инструментальной оправкой с опорным элементом и размещают в инструментальном гнезде шпинделя. В процессе технологического цикла обработки изделия опорный элемент средства обеспечения заданной жесткости позиционируют оппозитно инструменту, а опорный элемент упомянутого средства синхронно перемещают в направлении резания. Обеспечивается повышение класса точности и чистоты обработки изделия. 3 з.п. ф-лы, 6 ил.
1. Способ обработки резанием изделия с поверхностью сложного профиля и функциональным слоем пониженной жесткости посредством многофункционального программно-аппаратного комплекса (МПАК), включающий главное формообразующее перемещение режущего инструмента относительно поверхности функционального слоя изделия с использованием программно-организованной координатной исполнительной системы перемещения, которую оснащают координатно-организованной в ортогональной системе координат «XYZ» структурой главного формообразующего перемещения и позиционирования инструмента относительно поверхности функционального слоя изделия, при этом используют исполнительную систему позиционирования и относительного рабочего перемещения заготовки и режущего инструмента, которую оснащают средствами обеспечения заданной жесткости обрабатываемого изделия, конструктивно изготовленного с возможностью выполнения им функции промежуточной опоры для обрабатываемого изделия в процессе технологического цикла на металлорежущем станке МПАК, систему базирования и фиксации изделия в заданном положении, изготовленную в виде двух оппозитно расположенных опор, снабженных механизмом поворота изделия относительно продольной оси механизма поворота по круговой координате «А», и средство установки узлов и механизмов упомянутой структуры главного формообразующего перемещения и позиционирования режущего инструмента, кинематически организующих непосредственно рабочие перемещения режущего инструмента, причем в состав упомянутых узлов и механизмов вводят инструментальный узел, установленный с возможностью возвратно-поступательного перемещения, а МПАК оснащают системой числового программного управления (ЧПУ) и упомянутой исполнительной системой, и посредством системы (ЧПУ) обеспечивают возможность формирования интегрального формообразующего относительного перемещения изделия и режущего инструмента по заданной программе в процессе технологического цикла, отличающийся тем, что упомянутое средство установки узлов и механизмов упомянутой структуры главного формообразующего перемещения и позиционирования режущего инструмента конструктивно выполняют в виде портала, установленного на направляющих станины с возможностью возвратно-поступательного перемещения в горизонтальной плоскости по координате «Y», траверсу портала выполняют с горизонтальными направляющими, которые пространственно располагают в плоскости, ортогональной координате «Y», и конструктивно выполняют с возможностью синхронного возвратно-поступательного перемещения вдоль координаты «Y» совместно с порталом, при этом режущий инструмент с главным формообразующим перемещением и позиционированием дополнительно оснащают двумя идентичными каретками с вертикальными направляющими, которые устанавливают на горизонтальных направляющих траверсы с возможностью возвратно-поступательного перемещения по координате «X», инструментальный узел конструктивно выполняют в виде двух идентичных шпиндельных головок с вращающимися относительно своих осей по координате «C» шпинделями, при этом шпиндельные головки устанавливают на вертикальных направляющих кареток с возможностью независимого возвратно-поступательного перемещения по координате «Z», совместно с каретками - по координате «X», а также ограниченного поворота по круговым координатам «B» в вертикальной плоскости, при этом упомянутые опоры средств базирования изделия устанавливают на станине независимо от портала таким образом, что продольные оси механизмов поворота изделия пространственно ориентированы ортогонально плоскости расположения продольных осей траверсы и стоек портала, причем вдоль координатной оси «Y», при этом на стойках портала размещают поворотные магазины инструментов с инструментальными оправками, а средство обеспечения заданной жесткости обрабатываемого изделия оснащают инструментальной оправкой с опорным элементом и в процессе технологического цикла размещают непосредственно в инструментальном гнезде шпинделя одной из шпиндельных головок исполнительной системы металлорежущего станка МПАК, а в процессе осуществления технологического цикла обработки изделия опорный элемент упомянутого средства обеспечения заданной жесткости, функционально являющийся промежуточной опорой, позиционируют оппозитно режущему инструменту, при этом в процессе обработки изделия спозиционированные упомянутым образом режущий инструмент и упомянутый опорный элемент средства обеспечения заданной жесткости синхронно перемещают в направлении резания вдоль технологически заданного контура обрабатываемой поверхности изделия по реализуемой системой числового программного управления программе.
2. Способ по п.1, отличающийся тем, что в качестве опорного элемента средства обеспечения заданной жесткости обрабатываемого изделия используют непосредственно второй режущий инструмент или опорный ролик, а в процессе осуществления технологического цикла позиционируют с противоположной стороны поверхности изделия, обрабатываемой в данный момент первым режущим инструментом.
3. Способ по п.1, отличающийся тем, что в качестве опорного элемента средства обеспечения заданной жесткости обрабатываемого изделия используют пару оппозитно расположенных опорных роликов, которые в процессе технологического цикла позиционируют по обе стороны поверхности изделия, обрабатываемой в данный момент режущим инструментом, с возможностью охвата этой поверхности.
4. Способ по п.1, отличающийся тем, что по меньшей мере одну шпиндельную головку оснащают разгрузочным устройством, которое конструктивно выполняют в виде корпуса с размещенной в его полости на опорах вращения втулкой, кинематически не связанной со шпинделем, которую оснащают конической посадочной поверхностью для базирования инструментальной оправки режущего инструмента в виде строгального или токарного резца, или средства обеспечения заданной жесткости обрабатываемого изделия, и посредством конической посадочной поверхности функционально формируют инструментальное гнездо.
| US 6106204 А, 22.08.2000 | |||
| СПОСОБ ФОРМИРОВАНИЯ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ НА МЕТАЛЛОРЕЖУЩЕМ СТАНКЕ | 2007 |
|
RU2356704C2 |
| ИСПОЛНИТЕЛЬНАЯ СИСТЕМА ПРОГРАММНО-АППАРАТНОГО КОМПЛЕКСА ДЛЯ ФОРМИРОВАНИЯ РЕЗАНИЕМ ДИСКРЕТНЫХ ПРОФИЛЬНЫХ СТРУКТУР РИСУНКА ГРАВЮРЫ В ФУНКЦИОНАЛЬНОМ СЛОЕ ПЕЧАТНОЙ ФОРМЫ | 2007 |
|
RU2360771C2 |
| МЕТАЛЛОРЕЖУЩИЙ СТАНОК И СПОСОБ ОБРАБОТКИ ДЕТАЛЕЙ С ПОМОЩЬЮ ЭТОГО СТАНКА | 1994 |
|
RU2139170C1 |
| WO 9748555 A1, 24.12.1997. | |||

