Предлагаемое техническое решение относится к области радиолокации и может быть использовано для измерения угловых координат целей в процессе обзора пространства радиолокационной станцией (РЛС) при независимо флюктуирующих отраженных сигналах.
Известный способ измерения угловой координаты цели θ (угла места ε или азимута β) включает излучение зондирующих сигналов, прием и обнаружение отраженных от цели сигналов, формирование одномерного углового пакета (пачки) обнаруженных двоично квантованных сигналов (амплитуда сигналов не измеряется). Под одномерным угловым пакетом обнаруженных сигналов понимается группа ближайших положений луча по одной угловой координате, в которых в одной или нескольких ближайших дискретах дальности обнаружены отраженные сигналы. Угловая координата цели θ оценивается исходя из максимума функции правдоподобия путем решения уравнения (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М., 1974, стр. 46):

где хi - сигналы в угловом пакете обнаруженных двоично квантованных сигналов (xi=1 или 0);
i и n - номер и количество положений луча соответственно в упомянутом пакете по измеряемой угловой координате цели θ;
η(θi,θ) - весовой коэффициент для сигнала в i-м (i=1, …, n) положении луча в упомянутом пакете;
θi - значение угловой координаты положения луча с номером i в упомянутом пакете.
Как отмечается в упомянутом источнике, «решение уравнения (1) реализуется путем скачкообразного сдвига весовой функции η(θi,θ) относительно принятой реализации нулей и единиц в пакете. Процесс сдвига повторяется до тех пор, пока сумма (1) не станет равной нулю (или меньше по абсолютной величине некоторого фиксированного числа)».
Известный способ имеет три основных недостатка: во-первых, невысокую потенциальную точность вследствие того, что не используется такой информативный параметр сигнала, как амплитуда; во-вторых, из-за многократной проверки условия (1) при реализации способа требуется достаточно большой объем вычислительных ресурсов, а поскольку в мобильных РЛС вычислительные ресурсы ограничены, то способ не всегда может быть реализован в полном объеме, в этом случае потенциальная точность способа не достигается, и точность измерения угловых координат оказывается недостаточной; в третьих, способ дает значительные ошибки при отличающихся параметрах луча и сигналов в разных положениях луча.
Наиболее близкий способ измерения угловых координат цели в процессе осмотра зоны обзора радиолокационной станцией включает излучение зондирующих сигналов, прием и обнаружение отраженных от цели сигналов, измерение отношения сигнал/шум по мощности обнаруженных сигналов, формирование одномерного углового пакета обнаруженных сигналов. Угловая координата цели θ оценивается исходя из максимума функции правдоподобия путем решения уравнения (Самсоненко С.В. Цифровые методы оптимальной обработки радиолокационных сигналов, - М., 1968, стр. 257):

где i и n - номер и количество положений луча соответственно в одномерном угловом пакете обнаруженных сигналов по измеряемой угловой координате цели θ;
Ki и  - весовой коэффициент и его производная по угловой координате θ соответственно для сигнала в i-м (i=1, …, n) положении луча в одномерном угловом пакете обнаруженных сигналов;
- весовой коэффициент и его производная по угловой координате θ соответственно для сигнала в i-м (i=1, …, n) положении луча в одномерном угловом пакете обнаруженных сигналов;
 - отношение сигнал/шум по мощности обнаруженного сигнала.
- отношение сигнал/шум по мощности обнаруженного сигнала.
Как отмечается в упомянутом источнике, «уравнение (2) решается методом «проб и поиска» с последующим учетом получающихся ошибок», то есть условие (2) многократно проверяется для различных возможных положений цели по измеряемой угловой координате θ. Значение угловой координаты θ в момент выполнения условия (2) принимается за угловую координату цели.
Поскольку в наиболее близком способе используется информация об уровне сигнала (измеряется отношение сигнал/шум принятого сигнала), то этим устранен первый ранее указанный недостаток аналога и потенциальная точность способа увеличивается. Однако, как и в аналоге, многократная проверка условия (2) при реализации способа в мобильных РЛС приводит к значительным затратам вычислительных ресурсов, что не позволяет применить способ в полном объеме и обеспечить высокую точность измерения угловых координат. Кроме того, известный способ дает значительные ошибки измерения угловых координат цели при отличающихся параметрах луча и сигналов в разных положениях луча.
Решаемой задачей (техническим результатом), таким образом, является увеличение точности измерения угловых координат цели при ограниченных вычислительных ресурсах РЛС, а также при отличающихся параметрах луча и сигналов в разных положениях луча.
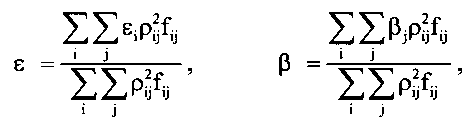
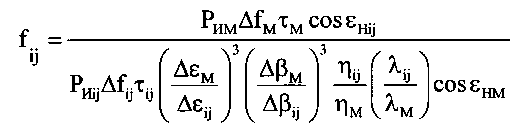
Указанный технический результат достигается тем, что в способе измерения угловых координат цели в процессе осмотра зоны обзора РЛС, включающем излучение зондирующих сигналов, прием и обнаружение отраженных от цели сигналов, измерение отношения сигнал/шум по мощности обнаруженных сигналов, формирование углового пакета обнаруженных сигналов, согласно изобретению, формируют двумерный угловой пакет обнаруженных сигналов (далее пакет), в пакете выделяют положение луча, в котором обнаруженный сигнал имеет максимальное отношение сигнал/шум, угловые координаты цели (угол места ε и азимут β) определяют в соответствии с математическими выражениями:

где εi, βj - угловые координаты положения луча в i-й строке и j-м столбце положений луча в пакете;
 - означает суммирование по всем положениям луча в пакете;
- означает суммирование по всем положениям луча в пакете;
 - отношение сигнал/шум по мощности сигнала, обнаруженного в положении луча в пакете с координатами εi,βj;
- отношение сигнал/шум по мощности сигнала, обнаруженного в положении луча в пакете с координатами εi,βj;
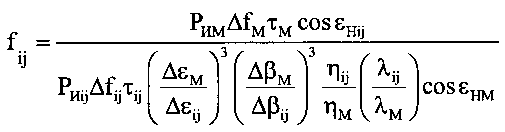 - весовой коэффициент, характеризующий значимость обнаруженного сигнала в положении луча в пакете с координатами εi, βj;
- весовой коэффициент, характеризующий значимость обнаруженного сигнала в положении луча в пакете с координатами εi, βj;
Δεij, ΔεМ - ширина луча по углу места в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
Δβij, ΔβМ - ширина луча по азимуту в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
τij, τМ - длительность сигнала в положении луча с координатами εi,βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
РИij, PИМ - импульсная мощность излучаемого сигнала в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
Δfij, ΔfM - ширина полосы частот сигнала в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
λij, λМ - длина волны сигнала в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
ηij, ηМ - коэффициент ослабления сигнала в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно (суммарное ослабление: в приемо-передающем тракте, при обработке сигналов, при распространении радиоволн в пространстве);
εHij, εНМ - отклонение луча по углу места от нормали к плоскости антенны в положении с координатами εi, βj и в положении с максимальным значением отношения сигнал/шум соответственно.
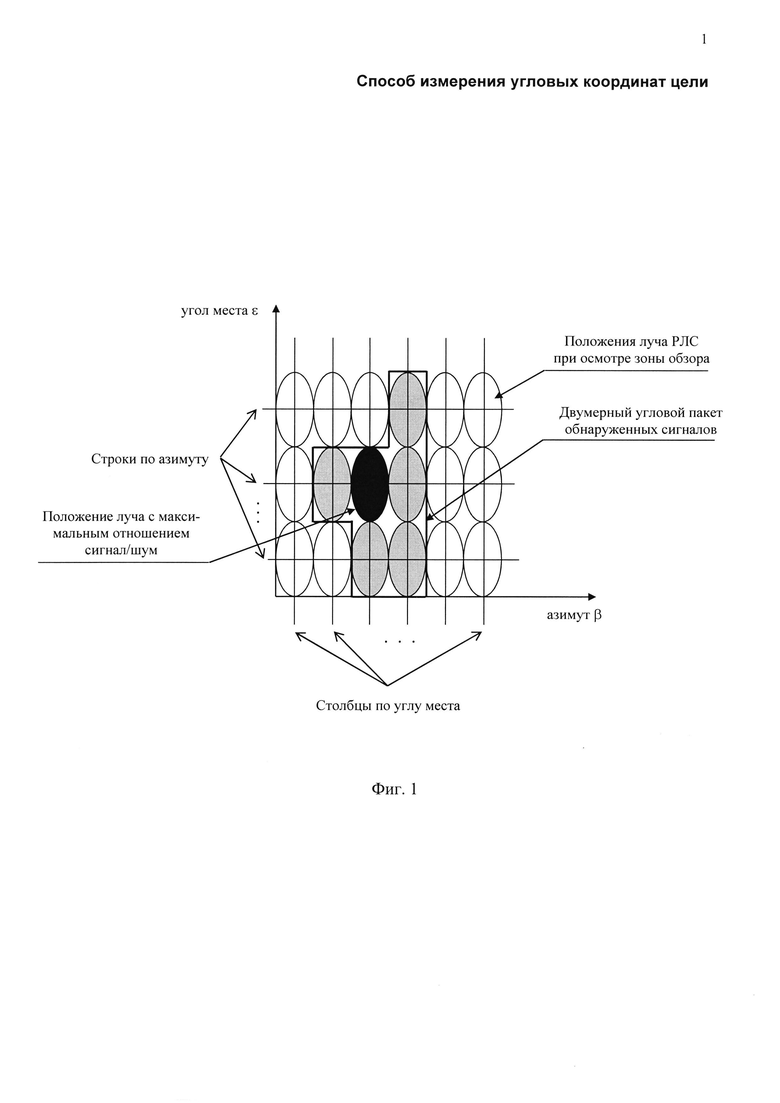
Под двумерным угловым пакетом обнаруженных сигналов понимается группа ближайших по угловым координатам положений луча, в которых в одной или нескольких ближайших дискретах дальности обнаружены отраженные сигналы (фиг. 1).
Поясним суть заявляемого способа.
Заявляемый способ предназначен для измерения угловых координат целей, отраженные сигналы от которых в угловом пакете независимо флюктуируют от положения к положению. Указанная флюктуация имеет место, например, при осмотре больших областей пространства, при котором обращение к ближайшим соседним положениям луча в пакете происходит через достаточно большое время, как, например, при регулярном осмотре зоны обзора, а также при смене несущей частоты.
При осуществлении способа отраженные от одной цели сигналы принимают, обнаруживают и объединяют в двумерный угловой пакет. В пакете определяют положение луча, в котором обнаруженный сигнал имеет максимальное значение сигнал/шум. Затем на основе известных параметров луча в этом и других его положениях в пакете, а также на основе известных параметров сигналов, излученных в соответствующих направлениях пакета, в соответствии с математическими выражениями (3) определяют угловые координаты цели ε и β.
В заявляемом техническом решении определение угловых координат цели осуществляется прямым их вычислением на основе известных и измеренных параметров сигналов в двумерном угловом пакете в соответствии с математическими выражениями (3). Поскольку выражения (3) достаточно точно описывают угловые координаты цели и при их использовании не требуется значительных вычислительных ресурсов, то точность измерения угловых координат целей заявляемым способом увеличивается, то есть достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг. 1 - пример двумерного углового пакета обнаруженных сигналов. Серым цветом обозначены положения луча в пакете, черным цветом - положение луча, в котором обнаруженный сигнал имеет максимальное значение сигнал/шум.
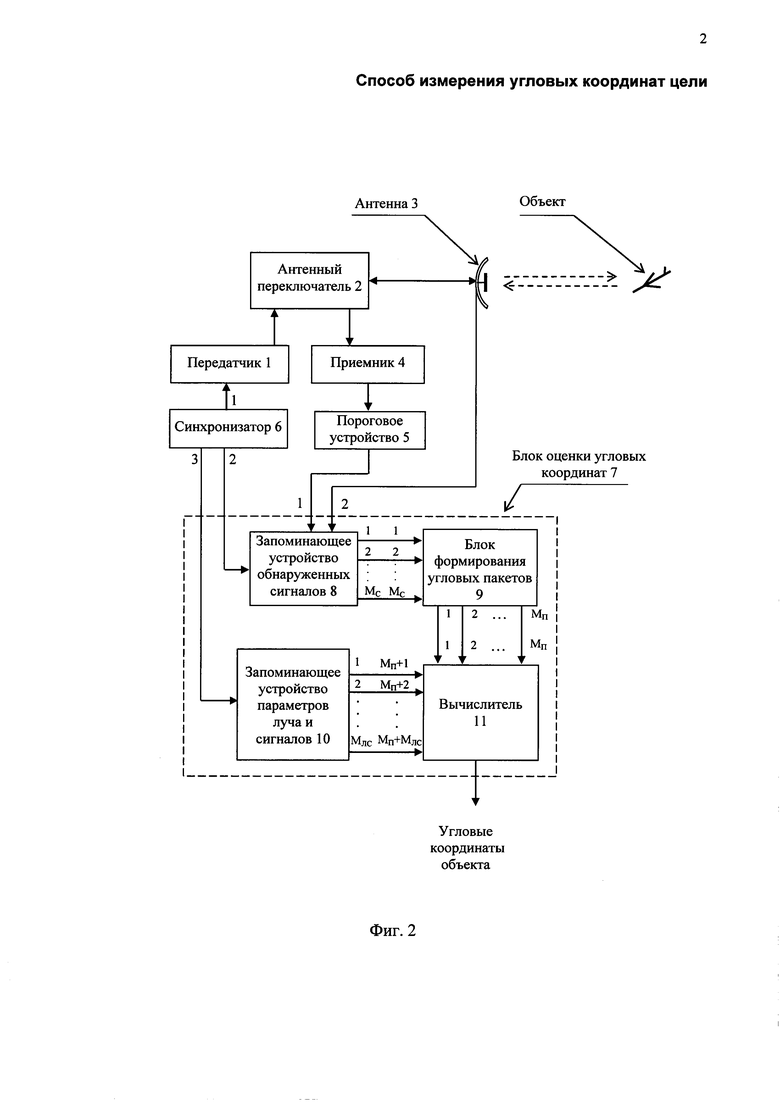
Фиг. 2 - блок-схема РЛС, реализующей заявляемый способ.
Заявляемый способ измерения угловых координат цели реализуется с помощью радиолокационной станции, которая содержит (фиг. 2) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, блок оценки угловых координат 7 включает запоминающее устройство обнаруженных сигналов 8, блок формирования угловых пакетов 9, запоминающее устройство параметров луча и сигналов 10 и вычислитель 11, причем первый и второй входы запоминающего устройства обнаруженных сигналов 8 являются первым и вторым входами блока оценки угловых координат 7 соответственно, выходы с 1-го по МС запоминающего устройства обнаруженных сигналов 8 соединены соответственно со входами с 1-го по МС блока формирования угловых пакетов 9, выходы с 1-го по МП которого соединены соответственно со входами с 1-го по МП вычислителя 11, выходы с 1-го по МЛС запоминающего устройства параметров луча и сигналов 10 соединены соответственно со входами с МП+1-го по МП+МЛС вычислителя 11. Выход вычислителя 11 является выходом блока оценки угловых координат 7 и выходом РЛС. Первый, второй и третий выходы синхронизатора 6 соединены соответственно с синхровходом передатчика 1, запоминающего устройства обнаруженных сигналов 8 и запоминающего устройства параметров луча и сигналов 10.
Количество выходов запоминающего устройства обнаруженных сигналов 8, входов и выходов блока формирования угловых пакетов 9, выходов запоминающего устройства параметров луча и сигналов 10, а также входов вычислителя 11, определяется значениями величин МС, МП, МЛС.
Величина МС определяется наибольшим количеством сигналов, которые могут быть обнаружены в зоне обзора, МП - наибольшим количеством угловых пакетов, которые могут быть сформированы в зоне обзора, МЛС - количеством параметров луча и сигналов, которые учитываются в положении луча при измерении угловых координат цели.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с. 278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с. 146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника, т. 2, - М., 1977, с. 132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с. 343-344).
Синхронизатор 6 выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М., 1970, с. 602-603).
Запоминающее устройство обнаруженных сигналов 8, запоминающее устройство параметров луча и сигналов 10 - запоминающие устройства (Интегральные микросхемы. Справочник под ред. Т.В. Тарабрина, - М., 1984).
Блок формирования угловых пакетов 9 - вычислитель, реализующий операцию объединения обнаруженных сигналов в двумерный угловой пакет (Интегральные микросхемы. Справочник под ред. Т.В. Тарабрина, - М., 1984).
Вычислитель 11 - вычислитель, реализующий операцию вычисления угловых координат цели в соответствии с математическими выражениями (3) (Интегральные микросхемы. Справочник под ред. Т. В. Тарабрина, - М., 1984).
Работа РЛС, реализующей заявляемый способ измерения угловых координат цели, происходит следующим образом. В передатчике 1 по командам синхронизатора 6 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от цели сигналы принимаются антенной 3, поступают в приемник 4, где измеряется их отношение сигнал/шум, и далее - на вход порогового устройства 5, где сравниваются с порогом обнаружения, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый (обнаруженные), проходят на выход порогового устройства 5. Обнаруженные сигналы с выхода порогового устройства 5 и сигналы, соответствующие угловым координатам луча антенны 3, поступают в блок оценки угловых координат 7. Значения амплитуд обнаруженных сигналов ρi,j с соответствующими угловыми координатами луча (εi,βj) по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство обнаруженных сигналов 8. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 8 извлекаются записанные в них данные и подаются в блок формирования угловых пакетов 9, где осуществляется формирование двумерных угловых пакетов обнаруженных сигналов. В запоминающем устройстве параметров луча и сигналов 10 заранее, то есть до начала работы РЛС, записываются параметры луча и сигналов, которые должны быть учтены в каждом положении луча в пакете при определении угловых координат целей. Координаты положений луча, которые вошли в состав двумерного углового пакета, а также параметры луча и сигналов в каждом положении луча в пакете подаются с выходов блока формирования угловых пакетов 9 и запоминающего устройства параметров луча и сигналов 10 на соответствующие входы вычислителя 11, где в соответствии с математическими выражениями (3) определяются угловые координаты цели.
Таким образом в РЛС, реализующей заявляемый способ, достигается заявляемый технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2007 |
|
RU2362183C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА | 2006 |
|
RU2325669C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358281C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2008 |
|
RU2363015C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309427C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| Способ измерения угловых координат цели | 2016 |
|
RU2649880C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307375C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2009 |
|
RU2408029C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
Изобретение относится к области радиолокации и может быть использовано для измерения угловых координат целей в процессе обзора пространства радиолокационной станцией (РЛС) при независимо флюктуирующих отраженных сигналах. Достигаемый технический результат - увеличение точности измерения угловых координат цели при ограниченных вычислительных ресурсах РЛС, а также при отличающихся параметрах луча и сигналов в разных положениях луча. Указанный результат достигается за счет того, что при измерении угловых координат формируют двумерный угловой пакет обнаруженных сигналов, в пакете выделяют положение луча, в котором обнаруженный сигнал имеет максимальное отношение сигнал/шум, угловые координаты цели определяют однократным вычислением в соответствии с математическими выражениями. 2 ил.
Способ измерения угловых координат цели в процессе осмотра зоны обзора радиолокационной станцией, включающий излучение зондирующих сигналов, прием и обнаружение отраженных от цели сигналов, измерение отношения сигнал/шум по мощности обнаруженных сигналов, формирование углового пакета обнаруженных сигналов, отличающийся тем, что формируют двумерный угловой пакет обнаруженных сигналов (далее пакет), в пакете выделяют положение луча, в котором обнаруженный сигнал имеет максимальное отношение сигнал/шум, угловые координаты цели (угол места ε и азимут β) определяют в соответствии с математическими выражениями:
где εi, βj - угловые координаты положения луча в i-й строке и j-м столбце положений луча в пакете;
 - означает суммирование по всем положениям луча в пакете;
- означает суммирование по всем положениям луча в пакете;
 - отношение сигнал/шум по мощности сигнала, обнаруженного в положении луча в пакете с координатами εi, βj;
- отношение сигнал/шум по мощности сигнала, обнаруженного в положении луча в пакете с координатами εi, βj;
 - весовой коэффициент, характеризующий значимость обнаруженного сигнала в положении луча в пакете с координатами εi, βj;
- весовой коэффициент, характеризующий значимость обнаруженного сигнала в положении луча в пакете с координатами εi, βj;
Δεij, ΔεM - ширина луча по углу места в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
Δβij, ΔβM - ширина луча по азимуту в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
τij, τM - длительность сигнала в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
PИij, РИМ - импульсная мощность излучаемого сигнала в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
Δfij, ΔfM - ширина полосы частот сигнала в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
λij, λM - длина волны сигнала в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
ηij, ηM - коэффициент ослабления сигнала в положении луча с координатами εi, βj и в положении луча с максимальным значением отношения сигнал/шум соответственно;
εHij, εHM - отклонение луча по углу места от нормали к плоскости антенны в положении с координатами εi, βj и в положении с максимальным значением отношения сигнал/шум соответственно.
| САМСОНЕНКО С.В | |||
| Цифровые методы оптимальной обработки радиолокационных сигналов | |||
| Москва, 1968, с.257 | |||
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ | 2008 |
|
RU2366971C1 |
| RU 98116981 A, 27.06.2000 | |||
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402034C1 |
| US 7071868 B2, 04.07.2006 | |||
| Устройство для воздушно-дуговой вырезки отверстий | 1961 |
|
SU141964A1 |
| US 5093666 A, 03.03.1992. | |||

