Предлагаемое техническое решение относится к области радиолокации и может быть использовано для измерения угловых координат объектов в процессе обзора пространства радиолокационной станцией (РЛС).
Известен способ измерения угловых координат объекта в процессе обзора пространства радиолокационной станцией, включающий излучение зондирующих сигналов, прием отраженных от объекта сигналов, измерение и запоминание значений мощности принятых сигналов и угловых координат луча, соответствующих принятым сигналам, формирование двумерного углового пакета принятых сигналов, вычисление угловых координат объекта. При этом угловая координата объекта θ оценивается исходя из расчета максимума функции правдоподобия в соответствии с известной формулой (Самсоненко С. В. Цифровые методы оптимальной обработки радиолокационных сигналов. Военное издательство Министерства обороны СССР. - М., 1968, стр.254-258):

где i и n - номер и количество положений луча соответственно в угловом пакете принятых сигналов по измеряемой угловой координате объекта θ;
Кi и  - отношение сигнал/шум и его производная по угловой координате (соответственно для i-го (i=1,..., n) сигнала углового пакета принятых сигналов;
- отношение сигнал/шум и его производная по угловой координате (соответственно для i-го (i=1,..., n) сигнала углового пакета принятых сигналов;
 - мощность i-го сигнала пакета принятых сигналов, нормированная к среднеквадратическому значению шумов приемного тракта.
- мощность i-го сигнала пакета принятых сигналов, нормированная к среднеквадратическому значению шумов приемного тракта.
Условие (1) многократно проверяется для различных возможных положений объекта по измеряемой угловой координате. Значение угловой координаты θ в момент выполнения условия (1) принимается за угловую координату объекта.
Поясним понятие «двумерный угловой пакет принятых сигналов».
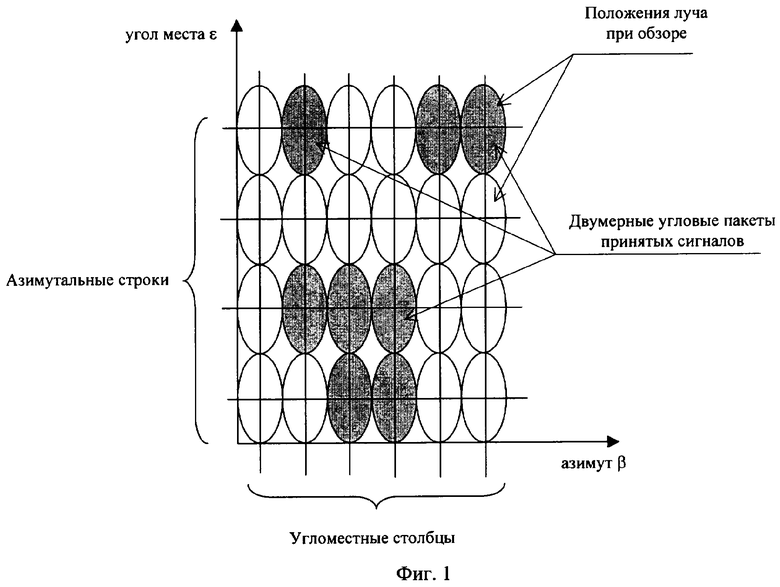
В процессе обзора пространства сигналы, отраженные от объекта и принятые приемником РЛС, сравниваются с порогом обнаружения. В результате, для каждой дискреты дальности, в каждом положении луча антенны в плоскости угол места (ε) - азимут (β) на выходе порогового устройства присутствует принятый сигнал, если он превышает уровень порога, сигнал на выходе порогового устройства отсутствует (пропуск обнаружения сигнала), если принятый сигнал ниже уровня порога. Принятые сигналы образуют угловой пакет, если в плоскости ε-β нет положений луча с пропусками сигналов одновременно по обеим угловым координатам (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Советское радио, 1974, стр.30, рис.1.7). На фиг.1 приведены примеры двумерных угловых пакетов принятых сигналов, отличающиеся размерами и конфигурацией. Положения луча, в которых произошло обнаружение, показаны серым цветом, в положениях луча, обозначенных белым цветом, обнаружений нет. Изображены три вида двумерного углового пакета принятых сигналов: из одного, двух и пяти положений луча.
В известном техническом решении при определении угловой координаты объекта многократно проверяется условие (1), поэтому для измерения угловой координаты объекта требуется достаточно большое время. Поскольку в мобильных РЛС существует острый дефицит временных ресурсов, то дополнительное время, которое может быть выделено на измерение угловых координат, весьма ограничено, вследствие чего условие (1) не может быть выполнено достаточно строго, и точности измерения угловых координат в таких РЛС оказываются низкими.
Наиболее близкий способ измерения угловых координат объекта в процессе осмотра пространства радиолокационной станцией (патент РФ №2235342 от 12.08.2002) включает излучение зондирующих сигналов в каждое направление зоны обзора, имеющее порядковый номер i по углу места и j - по азимуту, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание значений мощности принятых сигналов  и угловых координат луча (εi, βj), соответствующих обнаруженным сигналам, формирование двумерного углового пакета принятых сигналов, выбор сигнала наибольшей мощности
и угловых координат луча (εi, βj), соответствующих обнаруженным сигналам, формирование двумерного углового пакета принятых сигналов, выбор сигнала наибольшей мощности  в пределах двумерного углового пакета принятых сигналов, вычисление угловой координаты объекта θ по формуле:
в пределах двумерного углового пакета принятых сигналов, вычисление угловой координаты объекта θ по формуле:

где θ - измеряемая угломестная (θ=ε) или азимутальная (θ=β) угловая координата объекта, нормированная к ширине луча по соответствующей координате;
Lkn - оценки измеряемой угловой координаты объекта k=0, 1, 2, 3, n=0, 1;
L11=Lkn, при k=1, n=1;
z11, z21, z22, z23 - поправки, уточняющие оценку измеряемой угловой координаты объекта:




где 

L00=Lkn, при k=0, n=0;
L10=Lkn, при k=1, n=0;
L21=Lkn, при k=2, n=1;
L31=Lkn, при k=3, n=1;
 (q) - знак q.
(q) - знак q.
В наиболее близком способе угловые координаты объекта определяются в результате однократного вычисления на основании информации, полученной из строки и столбца положений луча, которым принадлежит положение луча с сигналом наибольшей мощности  . Информация остальных положений луча не используется, поэтому достигаемая в наиболее близком способе точность измерения угловых координат оказывается ниже потенциальной. Это является недостатком наиболее близкого способа.
. Информация остальных положений луча не используется, поэтому достигаемая в наиболее близком способе точность измерения угловых координат оказывается ниже потенциальной. Это является недостатком наиболее близкого способа.
Решаемой задачей (техническим результатом), таким образом, является повышение точности измерения угловых координат объекта.
Указанный технический результат достигается тем, что в способе измерения угловых координат объекта в процессе осмотра пространства радиолокационной станцией, включающем излучение зондирующих сигналов в каждое направление зоны обзора, имеющее порядковый номер i по углу места и j - по азимуту, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание значений мощности принятых сигналов  и угловых координат луча (εi, βj), соответствующих обнаруженным сигналам, формирование двумерного углового пакета принятых сигналов, выбор сигнала наибольшей мощности
и угловых координат луча (εi, βj), соответствующих обнаруженным сигналам, формирование двумерного углового пакета принятых сигналов, выбор сигнала наибольшей мощности  в пределах двумерного углового пакета принятых сигналов, вычисление угловой координаты объекта θ по формуле:
в пределах двумерного углового пакета принятых сигналов, вычисление угловой координаты объекта θ по формуле:

где θ - измеряемая угломестная (θ=ε) или азимутальная (θ=β) угловая координата объекта, нормированная к ширине луча по соответствующей координате;
Lkn - оценки измеряемой угловой координаты объекта k=0, 1, 2, 3, n=0, 1;
L11=Lkn, при k=1, n=1;
z11, z21, z22, z23 - поправки, уточняющие оценку измеряемой угловой координаты объекта:




где 

L00=Lkn, при k=0, n=0;
L10=Lkn, при k=1, n=0;
L21=Lkn, при k=2, n=1;
L31=Lkn, при k=3, n=1;
(q) - знак q.
согласно изобретению после выбора сигнала наибольшей мощности  осуществляют грубую оценку второй угловой координаты объекта ψг по формуле:
осуществляют грубую оценку второй угловой координаты объекта ψг по формуле:

при этом грубой оценкой второй угловой координаты объекта является грубая оценка его азимутальной координаты, если измеряемой координатой объекта θ является угломестная координата, или угломестной координаты объекта, если его измеряемой координатой является азимутальная координата,
где ψmax - положение луча по второй угловой координате, в котором мощность принятого сигнала максимальна;
ψmax±1 - одно из двух положений луча по второй координате с наибольшей мощностью принятого сигнала, соседнее с положением луча, в котором мощность принятого сигнала максимальна;
 - мощность наибольшего из двух принятых сигналов, соседнего по второй координате с положением луча, в котором мощность принятого сигнала максимальна,
- мощность наибольшего из двух принятых сигналов, соседнего по второй координате с положением луча, в котором мощность принятого сигнала максимальна,
после чего для каждой угломестной строки или азимутального столбца, образованных в пределах двумерного углового пакета принятых сигналов положениями луча вдоль второй угловой координаты, определяют суммарную эффективную мощность сигнала, принятого всеми положениями луча данной строки или столбца по формуле:

где S - номер упомянутой угломестной строки (S=i) или азимутального столбца (S=j);
Т и Nψ - соответственно номер положения луча и номер последнего положения луча в S-й угломестной строке или азимутальном столбце вдоль второй угловой координаты;
оценки k-го порядка измеряемой угловой координаты объекта вычисляют по формуле:

где θS - угловая координата луча в угломестной строке (θS=εi) или азимутальном столбце (θS=βj), образованными в пределах двумерного углового пакета принятых сигналов положениями луча вдоль измеряемой угловой координаты;
Nθ - номер последнего положения луча в упомянутой угломестной строке или столбце,
после чего осуществляют вычисление угловой координаты объекта θ.
Как уже отмечалось, в наиболее близком техническом решении (патент РФ №2235342 от 12.08.2002) при определении угловых координат объекта используются данные только угломестного столбца и азимутальной строки положений луча, содержащие положение луча с максимальной амплитудой принятого сигнала в пакете. Остальная информация двумерного углового пакета принятых сигналов не используется.
Поскольку сигналы, отраженные от объекта, принимаемые при различных положениях луча, флюктуируют, то наиболее точное положение объекта должно определяться исходя из наибольшего количества положений луча двумерного углового пакета.
Определение каждой угловой координаты объекта в заявляемом техническом решении производится в результате однократного вычисления с использованием данных всего двумерного углового пакета принятых сигналов.
Для вычисления обеих угловых координат объекта (угломестной и азимутальной) проводятся два аналогичных вычисления по формуле (2), т.е. обе угловые координаты вычисляются по одной и той же формуле. При этом каждый раз при вычислении точного значения измеряемой угловой координаты объекта используется грубая оценка (3) его второй координаты. В вычислениях используется весовая обработка сигналов углового пакета, основанная на оценке мощности принимаемых сигналов с учетом формы ДНА.
Использование данных всего пакета принимаемых сигналов позволяет в заявляемом способе обеспечить точность измерения угловых координат объекта в среднем большую, чем в наиболее близком способе, то есть достичь заявляемого технического результата.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - примеры двумерных угловых пакетов принятых сигналов.
Фиг.2 - блок-схема РЛС, реализующей заявляемый способ.
Заявляемый способ измерения угловых координат объекта реализуется с помощью радиолокационной станции, которая содержит (фиг.2) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, синхронизатор 6, блок оценки угловых координат 7, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5, выход порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами блока оценки угловых координат 7, первый и второй выходы синхронизатора 6 соединены с синхровходами передатчика 1 и блока оценки угловых координат 7, блок оценки угловых координат 7 включает запоминающее устройство обнаруженных сигналов 8, блок формирования угловых пакетов 9, блок выбора сигнала наибольшей мощности 10 и вычислитель 11, причем первый и второй входы запоминающего устройства обнаруженных сигналов 8 являются первым и вторым входами блока оценки угловых координат 7 соответственно, М выходов запоминающего устройства обнаруженных сигналов 8 соединены с М входами блока формирования угловых пакетов 9, МП выходов которого соединены с МП входами блока выбора сигнала наибольшей мощности 10, МП+1 выходов которого соединены с МП+1 входами вычислителя 11, выход вычислителя 11 является выходом блока оценки угловых координат 7 и выходом РЛС.
Количество выходов запоминающего устройства обнаруженных сигналов 8, входов и выходов блока формирования угловых пакетов 9, входов и выходов блока выбора сигнала наибольшей мощности 10, входов вычислителя 11, т.е. значения М и МП, определяется наибольшей возможной величиной двумерного углового пакета принятых сигналов по обеим угловым координатам. Величины М и МП для конкретных параметров РЛС (наименьшего шага перемещения луча при обзоре пространства, мощности зондирующего сигнала, типа обнаруживаемых объектов) может быть определена заранее. Так, например, известно, что в РЛС средней дальности действия для шага перемещения луча антенны порядка 0.5 ширины луча антенны при обнаружении крупных летательных аппаратов формируется двумерный угловой пакет сигналов не более чем из 5 положений луча. Отсюда следует, что значения М и МП равны 5.
Радиолокационная станция может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Справочник по основам радиолокационной техники. - М., 1967, с.278).
Антенный переключатель 2 - выполнен на циркуляторе (Справочник по основам радиолокационной техники. - М., 1967, с.146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М.: Сов. радио, 1977, с.132-138).
Приемник 4 - супергетеродинного типа (Справочник по основам радиолокационной техники. - М., 1967, с.343-344).
Цифровые элементы: запоминающее устройство обнаруженных сигналов 8, блок выбора сигнала наибольшей мощности 10 - выполнены на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М.: Радио и связь, 1984).
Блок формирования угловых пакетов 9 - вычислитель, реализующий операцию объединения принятых сигналов в двумерный угловой пакет. Положение луча, в котором произошло обнаружение объекта, включается в двумерный угловой пакет, если выполняется условие:

где Δε, Δβ - угловое расстояние соответственно по углу места и азимуту от анализируемого положения луча до ближайшего положения луча в пакете;
Δε, Δβ - шаг перемещения луча по углу места и азимуту соответственно при обзоре пространства.
Блок выбора сигнала наибольшей мощности 10 выполнен как устройство, в котором определяется наибольшая мощность сигнала среди набора мощностей сигналов (в двумерном угловом пакете принятых сигналов), например, с использованием устройств сравнения (Интегральные микросхемы. Справочник под ред. Б.В.Тарабрина. - М.: Радио и связь, 1984).
Вычислитель 11 - вычислитель, реализующий операцию вычисления угловых координат объекта в соответствии с формулой (2).
Работа РЛС, реализующей заявляемый способ измерения угловых координат объекта, происходит следующим образом. В передатчике 1 по командам синхронизатора 5 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 3 излучаются в пространство. Отраженные от объекта сигналы принимаются антенной 3, поступают в приемник 4. С выхода приемника 4 сигналы поступают на вход порогового устройства 5, где сравниваются с порогом, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5. Обнаруженные сигналы с выхода порогового устройства 5 и сигналы, пропорциональные угловым координатам луча антенны 3, поступают в блок оценки угловых координат 7. Значения мощности сигналов  с соответствующими угловыми координатами луча (εi, βj) по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство обнаруженных сигналов 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 8 извлекаются записанные в них данные и подаются в блок формирования угловых пакетов 9, где осуществляется формирование двумерных угловых пакетов принятых сигналов в соответствии с условием (4). Координаты положений луча, которые вошли в состав двумерного углового пакета, и соответствующие им уровни принятых сигналов, а также угловые координаты и уровень сигнала с максимальной мощностью подаются на вход вычислителя 11. В вычислителе 11 в соответствии с формулой (2) вычисляются угловые координаты объекта.
с соответствующими угловыми координатами луча (εi, βj) по мере движения луча антенны при обзоре пространства записываются в запоминающее устройство обнаруженных сигналов 8 и хранятся там. По командам с синхронизатора 6 из запоминающего устройства обнаруженных сигналов 8 извлекаются записанные в них данные и подаются в блок формирования угловых пакетов 9, где осуществляется формирование двумерных угловых пакетов принятых сигналов в соответствии с условием (4). Координаты положений луча, которые вошли в состав двумерного углового пакета, и соответствующие им уровни принятых сигналов, а также угловые координаты и уровень сигнала с максимальной мощностью подаются на вход вычислителя 11. В вычислителе 11 в соответствии с формулой (2) вычисляются угловые координаты объекта.
Поскольку в РЛС, реализующей заявляемый способ, используется информация всего двумерного углового пакета принятых сигналов, то точность измерения угловых координат объекта в среднем обеспечивается большая, чем в наиболее близком способе, то есть достигается заявляемый технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2007 |
|
RU2362183C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2009 |
|
RU2408029C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА (ВАРИАНТЫ) | 2008 |
|
RU2363015C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛИ | 2015 |
|
RU2581898C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309427C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358281C1 |
| Способ радиолокационного обнаружения опасных препятствий при маловысотном полете летательного аппарата | 2016 |
|
RU2645734C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307375C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ ОБЪЕКТА (ВАРИАНТЫ) И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2426147C2 |
Предлагаемое изобретение относится к области радиолокации и может быть использовано для измерения угловых координат объектов в процессе обзора пространства радиолокационной станцией. Достигаемым техническим результатом является повышение точности измерения угловых координат объекта. Технический результат достигается за счет того, что в процессе осмотра пространства радиолокационной станцией формируют двумерный угловой пакет принятых сигналов, содержащий угловые координаты положений луча, в которых произошло обнаружение объекта, и мощности отраженных от объекта принятых сигналов. На основе информации, содержащейся во всех положениях луча указанного двумерного углового пакета принятых сигналов, в результате однократного вычисления получают угловую координату обнаруженного объекта. 2 ил.
Способ измерения угловых координат объекта в процессе обзора пространства радиолокационной станцией, включающий излучение зондирующих сигналов в каждое направление зоны обзора, имеющее порядковый номер i по углу места и j - по азимуту, прием и обнаружение отраженных от объекта сигналов, измерение и запоминание значений мощности принятых сигналов  и угловых координат луча (εi, βj), соответствующих обнаруженным сигналам, формирование двумерного углового пакета принятых сигналов, выбор сигнала наибольшей мощности
и угловых координат луча (εi, βj), соответствующих обнаруженным сигналам, формирование двумерного углового пакета принятых сигналов, выбор сигнала наибольшей мощности  в пределах двумерного углового пакета принятых сигналов, вычисление угловой координаты объекта θ по формуле
в пределах двумерного углового пакета принятых сигналов, вычисление угловой координаты объекта θ по формуле

где θ - измеряемая угломестная (θ=ε) или азимутальная (θ=β) угловая координата объекта, нормированная к ширине луча по соответствующей координате;
Lkn - оценки измеряемой угловой координаты объекта k=0, 1, 2, 3, n=0, 1;
L11=Lkn, при k=1, n=1;
z11, z21, z22, z23 - поправки, уточняющие оценку измеряемой угловой координаты объекта:



где 
L00=Kkn при k=0, n=0;
L10=Lkn при k=1, n=0;
L21=Lkn при k=2, n=1;
L31=Lkn при k=3, n=1;
sign(q)-знак q,
отличающийся тем, что после выбора сигнала наибольшей мощности  осуществляют грубую оценку второй угловой координаты объекта ψг по формуле
осуществляют грубую оценку второй угловой координаты объекта ψг по формуле

при этом грубой оценкой второй угловой координаты объекта является грубая оценка его азимутальной координаты, если измеряемой координатой объекта θ является угломестная координата, или угломестной координаты объекта, если его измеряемой координатой является азимутальная координата,
где ψmax - положение луча по второй угловой координате, в котором мощность принятого сигнала максимальна;
 - одно из двух положений луча по второй угловой координате с наибольшей мощностью принятого сигнала, соседнее с положением луча, в котором мощность принятого сигнала максимальна;
- одно из двух положений луча по второй угловой координате с наибольшей мощностью принятого сигнала, соседнее с положением луча, в котором мощность принятого сигнала максимальна;
 - мощность наибольшего из двух принятых сигналов, соседнего по второй угловой координате с положением луча, в котором мощность принятого сигнала максимальна,
- мощность наибольшего из двух принятых сигналов, соседнего по второй угловой координате с положением луча, в котором мощность принятого сигнала максимальна,
после чего для каждой угломестной строки или азимутального столбца, образованных в пределах двумерного углового пакета принятых сигналов положениями луча вдоль второй угловой координаты, определяют суммарную эффективную мощность сигнала, принятого всеми положениями луча данной строки или столбца, по формуле

где S - номер упомянутой угломестной строки (S=i) или азимутального столбца (S=j);
Т и Nψ - соответственно номер положения луча и номер последнего положения луча в S-й угломестной строке или азимутальном столбце вдоль второй угловой координаты;
оценки k-го порядка измеряемой угловой координаты объекта вычисляют по формуле

где θS - угловая координата луча в угломестной строке (θS=εi) или азимутальном столбце (θS=βj), образованными в пределах двумерного углового пакета принятых сигналов положениями луча вдоль измеряемой угловой координаты;
Nθ - номер последнего положения луча в упомянутой угломестной строке или столбце,
после чего осуществляют вычисление угловой координаты объекта θ.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2235342C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ ДВУМЕРНОГО ПЕЛЕНГА И ЧАСТОТЫ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2000 |
|
RU2190236C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ КООРДИНАТЫ ИМПУЛЬСНОГО ТОЧЕЧНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ | 1985 |
|
SU1396783A1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ СЛОЖНЫХ СИГНАЛОВ | 2005 |
|
RU2286583C1 |
| US 5281973 A, 25.01.1994 | |||
| СПОСОБ ДЕЗОДОРАЦИИ ПРОДУКТОВ КОНДЕНСАЦИИ ХЛОРИРОВАННЫХ УГЛЕВОДОРОДОВ С ПОЛИСУЛЬФИДАМИ ЩЕЛОЧНЫХ МЕТАЛЛОВ | 1936 |
|
SU52497A1 |
| Якорная связь | 1982 |
|
SU1041398A1 |

