Изобретение относится к электротехнике, а также к области электропривода и преобразовательной техники, и может найти применение в электроприводе переменвро тока с целью утфавления асинхроввы- ми двигателями по Минимуму тока.
Известен электропривод переменного тока, который состоит из блока задания . активной и блока задания реактивной соо тавляюших тока статора, блсжа измерите ля угла положения ротора, блока задания величины абсолютного скольжения и формирователя трехфазных токов l..
Недостаток этого устройства состоит в высоком уровне электрических потерь в зоне маль1х и средних значений электромагнитного момента.
Наиболее близким к изобретению технш ческим решением 51вляется электропр вод переменного тока, содержащий аси хронный электродвигатель, подключенный к преобразователю частоты с каналами регулирования частоты и амплитуды тока статора, блок задания утфавляюшего сш нала, подсоединенный к каналу регулирования амплитуды тока статора преобразо вателя частоты и блоку корректирования величины абсолютного скольжения, блок выделения знака абсолютного скольжения, соединенный с первым входом умножения, второй вход котх)рого подключен к выходу блока корректирования величины абсолютного скольжения, а выход подключен к первому входу сумматора, второй вход которого соединен с блоком измерения частоты вращения ротора, а выход сумматора соединен со входов каналу регулирования частоты преобразователя 2 Этот преобразователь, обеспечивая вырокие энергетические характеристики пр даода И, имея относительно простую схему реализашга, обладает низким быстродействием и, как следствие, недостаточным диапазоне регулирования частоты вращения ротора.:
Целью изобретения является улучшение динамических характеристик и повышение помехозащоце нноств.
Поставленшя цель достигается тем, что в «электропривод переменного тока, содержащий асинхронный электродвигатель подключенньтй к преобразователю частоты с каналами регулирования частоты и амплитуды тока статора, баак задания управляющего сигнала, подсоединенный к каналу регулирования амплитуды тока статора преобразователя частоты и блсиу коррекции величины абсолютного скольжения, блок выделения знака абсолютного скольксешш, соединенный с блоксм умя жения, второй вход которого подключен к выходу блока коррекпии величины лютвого скольжения, а выход подключен к первому входу сумматора, второй вход которого соединен с блоком измерения частоты вращения ротора, а выход сумматора соединен со входом канала регулирования частоты хфеобразователя, введен блок дифференцирования, вход которого сх единен с выходсы блока задания управ ляющего сигнала, а выход с входом блока выделения знака абсолютного скольжения.
Дополнительно сумматор может быть снабжен третьим входом и введен второй блок дифференцирования, вход которого соединен с выходом блока выделения знаА ка абсолютного скольжения, а выход с третьим входом сумматора.
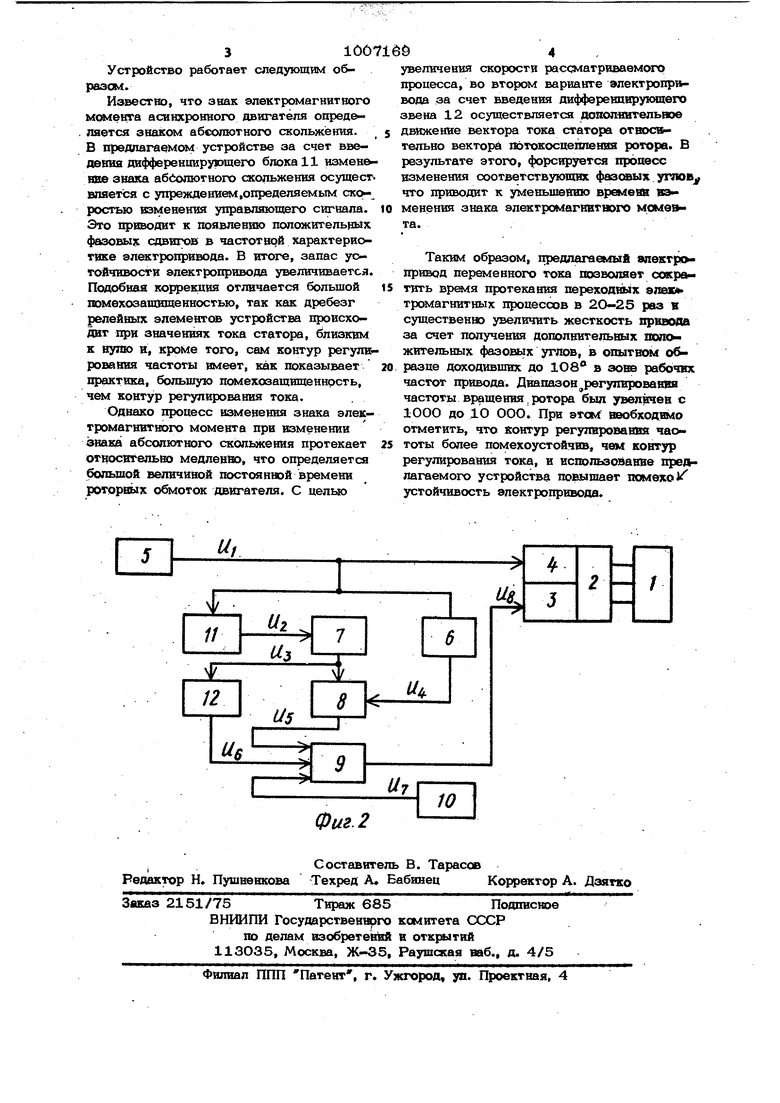
На фиг. 1 представлена функциональшя схема электропривода переменного тока, первый вариант; на фиг. 2 - то же, второй вариант.
Электропривод переменного тока содержит асинхронный электродвигатель 1 (фиг. 1), преобразователь 2 частоты с каналами 3 и 4 регулирования частоты и амплитуды тока статора, блок 5 задания управтшющего сигнала, подклю« енный к каналу 4 регулирования амплитуды тока статора и блоку 6 коррекюга величины абсолютного скольжения. Блок 7 выделения знака абсолютного скольжения со&Дйнен с первым входом блока 8 умножения, второй вход которого подключен к выходу блока 6 коррекции величины абсолютного скольжения. Выход блока 8 умножения соединен с первым входом сумматсфа 9, второй вход которого свяЕзан с блоком 10 тамерения частоты вращения ротора. Выход сумматора 9 соединен со входом канала 3 регулирования частоты преобразователя 2 частоты. В электропривод введен- блок 11 дифферешшровадая, вход которого соединен с выходе блока 6 задания управл51ющего сигнала, а выход - со входе блока 7 выделения знака абсолютного СЕольжеНия.
По второму варианту в электроприво.де переменного тока сумматор 9 снабжен третьим входом (фиг. 2) и введен второй блок 12 дифференцирования, вход кс торого соединен с выходом блока 7 выделения знака абсолютюго скольжения, а выход - с третьим входом сумма TOI 9 Устройство работает следующим образом. Известно, что знак электромагнитного момента асинхронного двигателя определяется знаком абсогаотного скольжения. В предлагаемом устройстве за счет введения дифференцирующего блока 11 измени нве знака аб Ьолютного скольжения осущест вляется с упреждением .определяемым скрростью ввменения управляющего сигнала. Это приводит к появлению положительных фазовых сдвигов в частотной характернотике электропривода. В итоге, запас уотойчивости электропривода увеличивается. Подобная коррекция отличается большой помехозащищенностью, так как дребезг релейных элементов устройства происходит при значениях тока статора, близким к нулю и, кроме того, сам контур регули рования частоты имеет, как показывает практика, большую помехозащищенность, чем коитур регулирования тока. Однако процесс изменения знака электромагнитного момента при изменении ёнака абсолютного скольжения протекает отиосителыю медлевво, что определяется большой величиной постоянной времени роторных обмоток двигателя. С целью увеличения скорости рассматриваемого процесса, во втором варианте электропривода за счет введения дифференцирующего вена 12 осуществляется довол-нительвое движение вектора тока статора относительно вектора потокосцепления роторе. В результате этого, форсируется процесс изменения соответствующих угяов что приводит к уменьшению времевв вэменения знака электромагнитного мсмевта. Таким образом, предлагаемый апектропривод переменного тока позволяет сократить вр0у(я протекания nepexoAtOiix впек тромагнитных процессов в 20-25 раз в существенно увеличить жесткость привода за счет получения дополнительных шхк жительных фазовых углов, в опытшм образце доходивших до 108 в эове рабочих частот привода. Диапазон,регулирования частоты вращения, ротора был увеличеи с 10ОО до 10 ООО. При этом веобходимо отметить, что коитур регулирования частоты более помехоустойчив, чем коитур регулирования тока, и использование преялагаемого устройства повышает noMexoV устойчивость электропривода.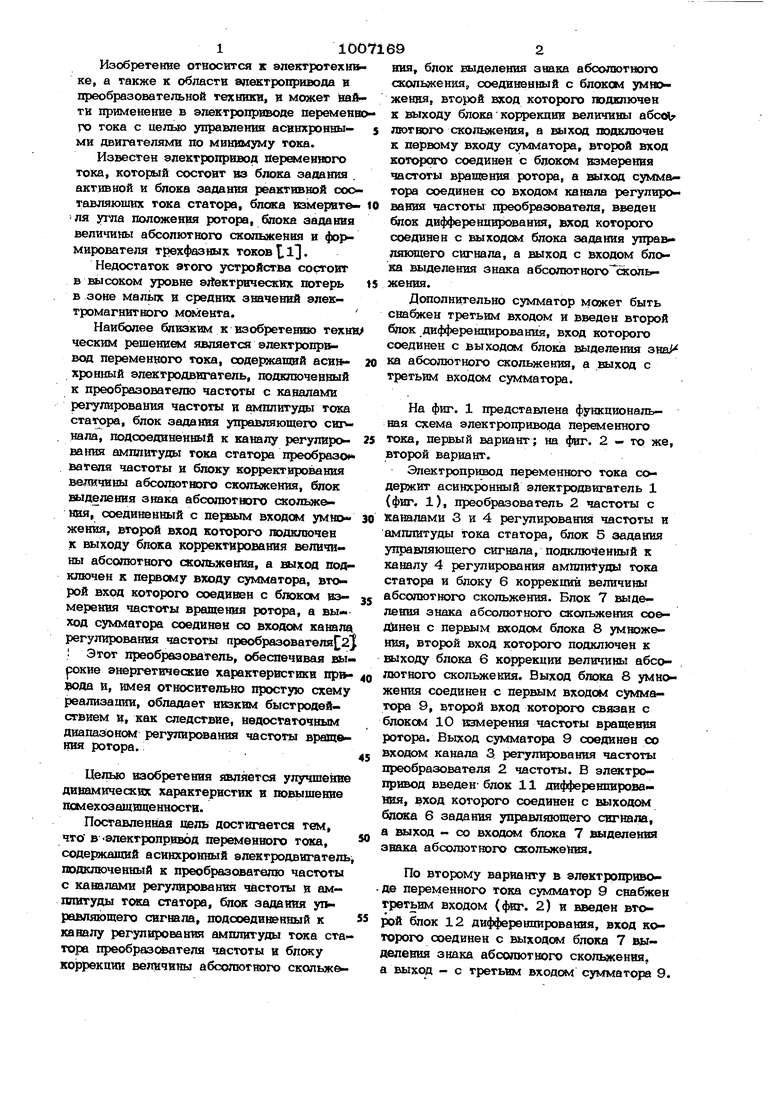
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1981 |
|
SU1010714A1 |
| Устройство для регулирования скорости асинхронного двигателя | 1982 |
|
SU1064411A1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Устройство управления асинхронным двигателем | 2019 |
|
RU2723671C1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
| Устройство для управления частотойВРАщЕНия POTOPA АСиНХРОННОгО элЕКТРОдВигАТЕля | 1979 |
|
SU838996A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
1ЭЛЕКТРОПРИВОД ПЕРЕМЕННСЯХ ТОКА, содержащий асинхронный алектродввгатель, подключенный к преобразо&атёлх) частоты с каналами регулирования. частоты и амплитуды тока статора, блок задания упра)вля1рщего сигнала, подсоединенный к кашлу регулирования амплитуды тсжа статора преобразователя частоты и оку корректирования величины а6солютно1ч скольжения, блок выделе8ИЯ знака абсолютного скольжения, ооедвВ8ННЫЙ с первым входом блока умвожевия, второй вход которого подключав. X выходу блока корректирования величины абсолют вогр скольжения, а выход подключен к перюому входу сумматора, второй вход которого соединен с блоком взмерешш частоты врашения ротора, а вьп&оа сумматора соединен с входе канала регулвро вания чистоты преобразсюателя, от «к чающийся тем, что, с цепью :улучшения динамических харахтеристик V пов1 1шения помехозащщценноств, введен бдок дифференцирования, вход которого соединен с выходки блока задания упраь ляющего сигнала, а выход - с входом блока выделения знака абсошотвого сколь жения... СП 2. Электропривод по п. 1, о т л в ч а- ю щ и и с я тем, что сумматсф свабс жен третьим входом и введен второй блок дифференцирования, вход которого с выход(Ии1 блока выделеияя знака аб солютного скольжения, а выход - с треть о о им входсж сумматора. б L--/ CD
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бродовсжнй В.Н | |||
| и др | |||
| Приводы с частотно-токовым управлением | |||
| М., Энергия, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Саняпер А.С., CapfeToE Р.С | |||
| Автоматическое частотное управление асинхронными двигателями | |||
| М., Энергия, 1974, с | |||
| Способ приготовления кирпичей для футеровки печей, служащих для получения сернистого натрия из серно-натриевой соли | 1921 |
|
SU154A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
